基于三維搖桿的轉臺控制器設計
2018-08-09 08:58:20陳俐潔徐陽
科技資訊 2018年8期
陳俐潔 徐陽

摘 要:為滿足某型船載探照燈和轉臺的實際控制需求,采用ATmega8微處理器設計了基于三維搖桿的新型控制器。實現了轉臺的方位、俯仰轉動,并綜合了轉臺的速度比例控制,同時還實現了探照燈的開、關及焦距調節等功能,達到了預期的控制指標。該設計在轉臺綜合控制及操控性等方面開辟了新途徑,同時也具有很強的實用價值。
關鍵詞:探照燈 轉臺 三維搖桿 控制器 ATmega8
中圖分類號:TB47 文獻標識碼:A 文章編號:1672-3791(2018)03(b)-0078-02
Abstract: In order to satisfy the actual control requirements of a certain type of ship searchlight and turntable, a new controller based on three dimensional rocker is designed by using ATmega8 microprocessor. The rotation and rotation of the turntable is realized, and the speed proportional control of the turntable is integrated. At the same time, the functions of opening and closing of the searchlight and focal length adjustment are realized, and the expected control index is achieved. The design has opened up a new way in the comprehensive control and manipulation of the turntable, and also has a strong practical value.
Key Words: Searchlight; Turntable; Three dimensional rocker; Controller; ATmega8
隨著信息技術的飛速發展,探照燈被廣泛應用于安防、照明等諸多領域,特殊的使用環境對其控制設備的可操作性、便捷性及可靠性等性能提出了更高的要求。鑒于搖桿操控性強、使用方便、開發容易等特點,本控制器采用三維搖桿實現探照燈及轉臺操控的特殊要求。
1 系統組成及控制原理
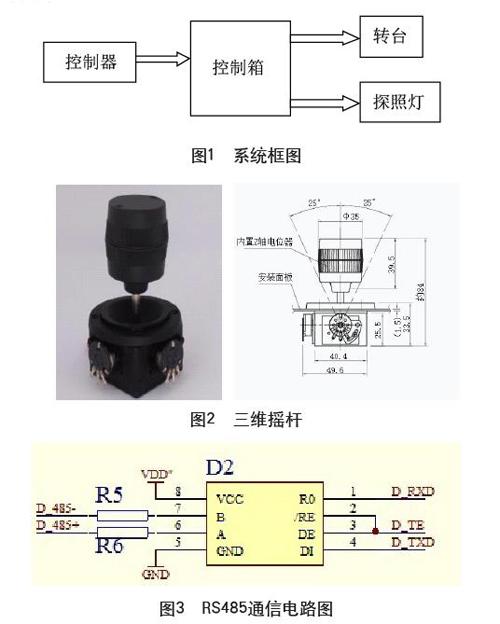
本船載探照燈轉臺系統包括探照燈、轉臺、控制箱、控制器四個部分,如圖1系統框圖所示。控制器上電后,通過開關燈按鈕的開閉,可直接控制探照燈的開關;通過搖桿的轉動可發出控制信號,控制箱接受控制信號并進行解析,再將控制命令發送給轉臺和探照燈,從而實現對轉臺的方位、俯仰以及探照燈焦距調節等控制。
2 硬件設計
2.1 主控芯片
本控制器采用ATMEL公司的ATmega8微處理器作為主控芯片。該芯片是基于RISC結構的增強型、低功耗AVR微處理器,數據吞吐能力達1MIPS/MHz,可有效緩解處理器功耗和處理速度之間的矛盾。此外,其內部集成了A/D變換、串口等硬件接口電路,可實現搖桿三維數據的模數轉換,FLASH和EEPROM能夠采用普通的下載器實現下載和上載,性價比極高。
2.2 三維搖桿
三維搖桿,如圖2所示,有X、Y、Z三個軸向,設計采用X、Y軸分別控制轉臺的方位和俯仰,Z軸控制探照燈的焦距變換。硬件設計時,三個軸向上各連接了一組由電容和電阻構成的低通濾波器,對三個軸向的控制信號進行濾波,以消除干擾和抖動。搖桿的控制角度經過模數轉換與轉臺速度的數字量建立對應關系,實現轉臺速度的比例控制。此外,在電路板上設置了零值按鈕,用于搖桿三維動作的零值校準。
2.3 通信模塊
RS485通信方式,傳輸距離遠,結合Modbus通信規約,可實現高效、可靠的信息通訊,本設計采用MAX485芯片作為通信模塊的核心芯片,來完成控制器與控制箱的相互通信,電路圖如圖3所示。
3 通信協議
3.1 串口通信格式
串口通信采用RS485主從通信模式,通訊波特率為9600bit/s,數據格式為1位起始位,8位數據,1位停止位,無校驗位。
3.2 協議規則
Modbus協議是由Modicon公司在1979年開發出來的網絡協議,是第一個真正意義上用于工業現場總線協議。它定義了設備與設備之間的信息傳輸方式,使控制器之間、控制器和其他設備之間可以進行通信和傳輸數據。本設計采用經簡化后的Modbus通信RTU模式協議。通訊命令格式,如表1所示。其中,CRC0和CRC1為CRC校驗值,用于確保傳輸數據準確可靠。
4 軟件設計
4.1 搖桿數據處理
為有效濾除脈沖噪聲,保護有效數據,軟件設計將多次采集的搖桿模擬量數據通過A/D轉換成數字量后,又進行了中值濾波處理,中值濾波算法如公式(1)所示。
4.2 功能設計
為有效提高CPU執行程序的效率,對搖桿的數據采集、數據發送與接收等處理均采用中斷執行。控制器通過A/D中斷程序每隔10ms采集一次模擬量,并將其送入相應的通道進行A/D轉換,轉換結束中斷返回并將相應數據緩存;A/D轉換的通道選擇由定時器2中斷完成;三維搖桿的3個控制動作數據的處理及開關燈控制均在定時器1的中斷程序中完成;串口數據發送由T1中斷啟動,待數據發送完成后,終止串口中斷。
4.3 主程序
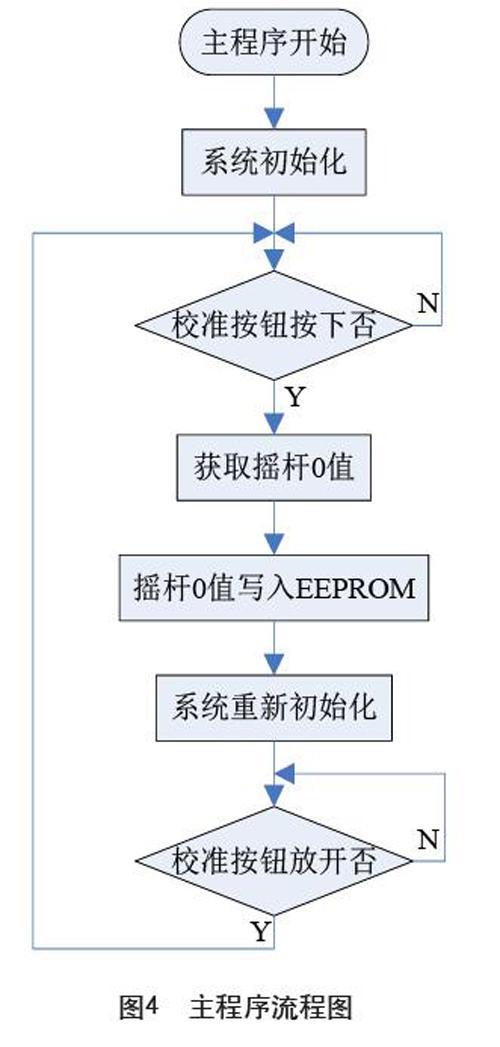
本控制器搖桿的采樣、啟動按鈕及數據傳輸等過程均由中斷程序處理,主程序僅對三維搖桿的零值校準進行處理。當校準按鈕按下時,由主程序段處理搖桿位于復位狀態下的數值,并將該值寫入EEPROM,作為此后的初始值。之后,程序再次初始化,待校準按鈕釋放后重新進入校準按鈕判斷循環,主程序流程圖如圖4所示。
5 結語
本控制器已成功應用于某型船載探照燈轉臺控制系統中,經實踐檢驗,該控制器能準確地實現轉臺方位和俯仰的轉動控制,且可按搖桿的幅度比例控制轉動速度,同時實現探照燈的開、關及焦距調節等功能,圓滿完成了技術指標的要求。此外,本設計兼容了ATmega48、ATmega88芯片,還有進一步擴展功能及提升可靠性的空間。
參考文獻
[1] 龍濤,張常年,李爭平.基于AT90USB162的搖桿設計[J].北方工業大學學報,2012,24(3):11-16.
[2] 汪珺.基于單片機的數字搖桿控制器[J].現代經濟信息,2014(21):374-376.
[3] 馬潮,詹衛前,耿德根.ATmega8原理及應用手冊[M].北京:清華大學出版社,2003.
[4] 劉紫燕,馮亮,詹志輝.Modbus協議RTU模式與TCP模式的通信轉換設計[J].科學技術與工程,2013,13(18):5191-5196.
