伸縮式機械手結(jié)構(gòu)分析與研究
2018-08-17 06:12:38嚴(yán)雪冬張武學(xué)
電子工業(yè)專用設(shè)備
2018年4期
嚴(yán)雪冬,張武學(xué)
(中國電子科技集團第四十五研究所,北京 101601)
單晶硅太陽能電池是當(dāng)前廣泛應(yīng)用的一種太陽能電池,不同行業(yè)和領(lǐng)域的電池片尺寸各不相同,故需進行相應(yīng)的變型設(shè)計來實現(xiàn)高效穩(wěn)定的印刷。伸縮式機械手是印刷電池片傳輸?shù)闹匾考涔ぷ鲿r,通過機械手臂深入電池片底面,經(jīng)過兩根平皮帶移動,將存放在料盒中的電池片取出,然后隨兩根同步運行的平皮帶移動到下一個工位。料盒間歇下降1個片距,平皮帶連續(xù)轉(zhuǎn)動進行傳片,直到料盒中的電池片全部傳出,整個過程要求取片的速度均勻且電池片移動不能有太大偏斜。
1 伸縮式機械手主要結(jié)構(gòu)
伸縮式機械手主要包括機械手臂、機械手臂驅(qū)動機構(gòu)和印刷電池片傳輸機構(gòu)三部分,其主體結(jié)構(gòu)如圖1所示,采用2個電機分別獨立控制驅(qū)動和傳輸機構(gòu)。
1.1 機械手臂
如圖2所示,直線導(dǎo)軌安裝在導(dǎo)軌底板上,起導(dǎo)向作用,連接板與直線導(dǎo)軌滑塊固定連接,上托板與連接板通過內(nèi)六角螺釘連接。

圖1 伸縮式機械手主體結(jié)構(gòu)圖
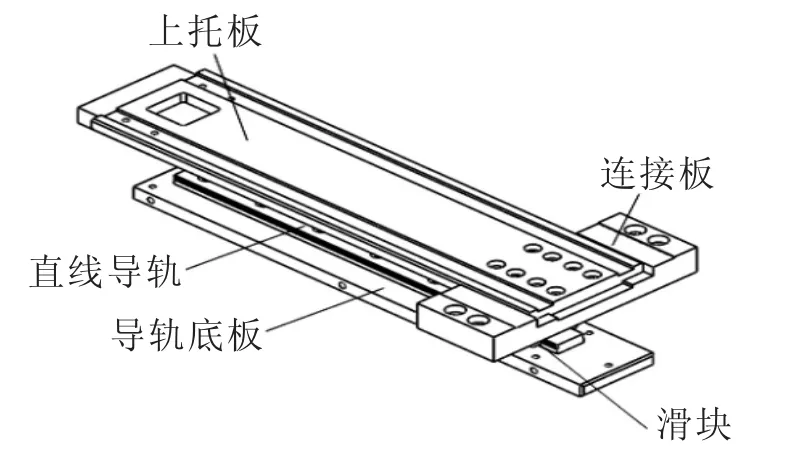
圖2 機械手臂示意圖
1.2 機械手臂驅(qū)動機構(gòu)
機械手臂驅(qū)動機構(gòu)工作原理如圖3所示,電機帶動同步帶輪旋轉(zhuǎn),驅(qū)動架隨同步帶左右移動,依靠電機架左移張緊同步帶。電機安裝在電機架上,電機架通過內(nèi)六角螺釘與前立板固定連接,通過下壓帶板,將水平同步帶與驅(qū)動架固定,水平同步帶另一端裝有惰輪,惰輪通過惰輪軸與惰輪軸座固定連接。

圖3 機械手臂驅(qū)動機構(gòu)主體示意圖
登錄APP查看全文
猜你喜歡
《學(xué)習(xí)方法報》歷史中考版(2023年21期)2023-11-09 07:40:38
數(shù)學(xué)小靈通(1-2年級)(2020年9期)2020-10-27 03:24:18
電腦報(2020年35期)2020-09-17 13:25:53
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
當(dāng)代貴州(2019年41期)2019-12-13 09:28:56
電腦報(2019年40期)2019-09-10 07:22:44
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
兒童故事畫報·發(fā)現(xiàn)號趣味百科(2015年12期)2016-01-25 00:41:49
中國共青團(2015年7期)2015-12-17 01:24:38
環(huán)球時報(2009-09-09)2009-09-09 09:42:49