一種改進的鋰電池SOC粒子濾波估計方法①
2018-08-17 03:17:00王順利劉小菡
電池工業 2018年3期
關鍵詞:模型
王 露,王順利,陳 蕾,張 麗,劉小菡
(西南科技大學、信息工程學院自動化系,四川 綿陽 621010)
引言[1]
鋰電池荷電狀態(state of charge,SOC)的變化為非線性,其受各種因素如電化學反應、溫度等影響,無法直接測得,這使得對其準確估算成了一個難題。人們針對非線性估計問題在卡爾曼濾波基礎上提出擴展卡爾曼(EKF)、無跡卡爾曼(UKF)等改進算法。EKF用一階泰勒展開處理非線性問題,UKF不需線性化,利用采樣點的概率分布近似狀態向量的概率密度函數,但都局限于高斯分布。PF不需定系統和觀測噪聲為高斯分布,可應用于非線性非高斯模型,優于前述方法。高建樹等人[2]在SIR-PF算法上提出了改進估算SOC的PF算法,為電動汽車電池SOC的估算找尋新思路;烏蘭花等人[8]在PF權值更新中加入神經網絡估計鋰電池SOC,取得了更好性能;Xiong R[6]等人采用一種雙尺度PF法對不同時間尺度下的系統狀態和參數進行了估計預測,有很好穩定性。本文在搭建合適的鋰電池等效電路模型基礎上,建立基于安時積分和PF修正的SOC估計改進方法,實現算法模擬仿真評估,通過磷酸鐵鋰電池放電測試數據對算法進行驗證。
1 鋰電池等效電路模型建立
實現濾波算法的前提工作是選擇搭建合適的鋰電池等效電路模型。對于不同的研究與應用要求,需要選取不同精度和復雜度的模型。在權衡準確性和復雜度之后,本次實驗選用結合RC模型和Thevenin模型的二階RC模型。如圖1所示,其中U oc為電池的開路電壓,在特定溫度下與SOC呈一定的函數關系。R0為歐姆內阻,R1、R2為極化內阻,C1、C2為極化電容,R1C1電路時間常數τ1模擬電池電流突變,R2C2的τ2模擬電壓緩變。
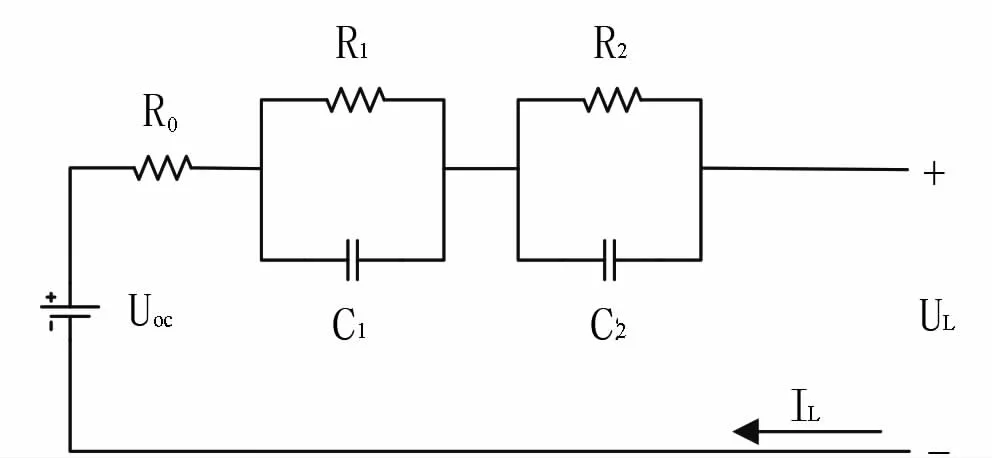
圖1 鋰電池等效電路模型Fig.1 Equivalent circuit model of the lithium battery
工作電流I L為系統輸入,圖中表示放電。電池端電壓U L為觀測值,得出離散化后的狀態空間模型如下。
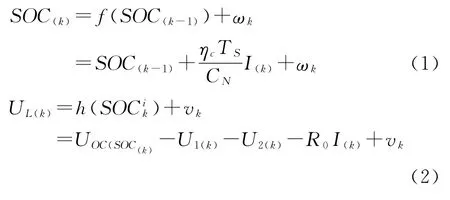
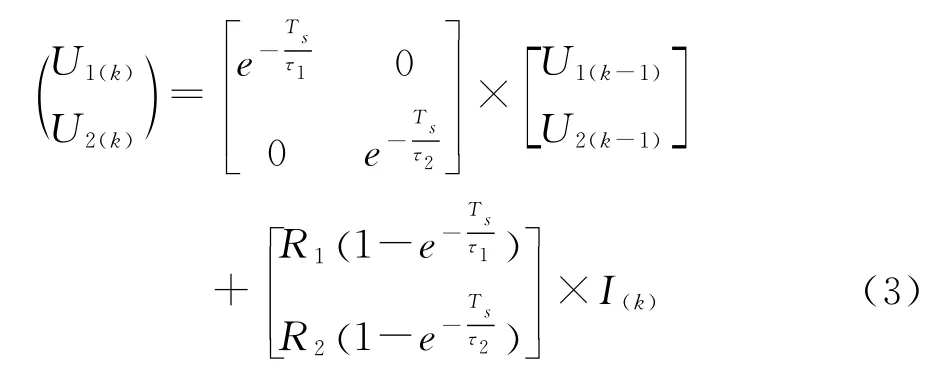
式(1)為狀態方程,T S為采樣間隔,ωk表示系統的過程噪聲;式(2)為量測方程,νk表示系統觀測噪聲。U OC(SOC(k))關系曲線可以由開路電壓與SOC的標定實驗得到。二階RC模型的其他參數(歐姆內阻R0、電化學極化內阻R1與電容C1、濃差極化內阻R2與電容C2)使用HPPC測試實驗進行辨識,利用最小二乘法擬合電壓曲線得到相應的參數。
2 基于PF的SOC估算
PF是一種用蒙特卡羅(SMC)方法和遞推貝葉斯濾波算法估計的統計濾波方法,它將貝葉斯估計的積分運算通過SMC處理成求和運算,得到系統狀態的最小均方差估計。其基本思想是采集隨機樣本,根據量測不斷調整粒子的權重和位置以修正之前的經驗條件分布。與其它濾波方法如KF、EKF和UKF等相比,PF不必對系統狀態作任何先驗假設,理論上可適用于任何能用狀態空間模型描述的隨機系統。根據前面建立的等效二階RC模型所得到的過程與量測方程,應用PF對SOC的估算,可以提高SOC估算的精度,在保證同樣精度的情況下,可減少算法的粒子采樣數,從而減少計算量。
程序流程圖如圖2,其過程可用以下步驟描述:
(1)初始化:利用先驗概率p(x0)產生N個SOC初始粒子粒子權值
(2)算法循環過程:①更新。根據系統更新方程,得到下一時刻先驗概率樣本更新粒子權重
應計盈余管理。虛擬變量。采用修正瓊斯模型 (Dechow等,1995[26]) 計算操控性應計,應計盈余管理的計算模型如下,先將模型 (1)分年度分行業回歸,再將估計出來的回歸系數帶入模型 (2)。

圖2 粒子濾波流程圖Fig.2 Flow diagram of PF algorithm
⑥判斷程序結束條件,若未結束,時刻k=k+1,到①步。
3 實驗與分析
電池測試實驗采用LFP電池進行測試,充電上限電壓3.65V,放電下限2.0V,額定容量10Ah。首先需要對選取的二階RC模型模型進行參數辨識。實驗內容為[2]:

圖3 OCV-SOC標定曲線Fig.3 OCV-SOC calibration curve
(1)開路電壓(OCV)辨識:在室溫(25℃)下,充滿電靜置1小時,放電每放出10%SOC時靜置30min,此時電壓作為OCV,對數據整理得到OCVSOC關系曲線如圖3。擬合曲線得關系式(4)。

(2)其他參數(R0、R1、C1、R2、C2)辨識:測試曲線如圖4,R0等于由放電開始和結束瞬間電壓降平均值與電流之比。

圖4 HPPC測試曲線Fig.4 HPPC testing curve
脈沖放電后的靜置時間,RC為零輸入響應,端電壓方程如式(5),

U1(0+)為放電結束瞬間R1C1電路電壓初始值,U2(0+)為放電的初始值,τ=RC,利用最小二乘法擬合脈沖放電結束后的電壓曲線可得到τ1和τ2。脈沖放電過程中,RC電路為零狀態響應,端電壓方程如式(6)。

同樣使用最小二乘法得到R1和R2,C1和R2可由τ/R得到。最后可以的到各參數與SOC的關系曲線方程。
(3)SOC估算仿真實驗。使用實驗得出的參數,有(1)~(3)式得到PF算法的過程遞推方程和量測噪聲方程,根據算法流程,模擬實際放電過程中電流變化的情況,進行SOC估算,得到仿真曲線圖像,如圖5。
模擬仿真結果表明,PF算法跟蹤SOC有良好的濾波效果,其誤差最終穩定在4%內,如圖6。

圖5 PF估算SOC跟蹤曲線Fig.5 PF estimation tracking curve of SOC

圖6 PF的跟蹤誤差Fig.6 Error of PF tracking
使用LFP電池實測數據對算法進行訓練,對比仿真與實測數據跟蹤效果,算法具有良好的穩定性。
4 結論
本文選擇二階RC等效電路作為LFP電池的等效模型,進行HPPC實驗獲取模型參數,得到算法所需的過程和量測方程。PF算法應用自適應重采樣方法,提高了粒子有效性,同時減小算法的復雜度。結果SOC估計逐漸接近真實值,誤差最終穩定在4%以下。使用實測放電數據訓練算法,在保證精度的前提下,可以減少采樣粒子數,減少計算量。下一步目標是算法精度的改進和鋰電池實際工況中估算SOC的自適應PF算法應用。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
