翼型動(dòng)態(tài)失速等離子體流動(dòng)控制試驗(yàn)
2018-08-29 05:39:08李國(guó)強(qiáng)常智強(qiáng)張?chǎng)?/span>陽(yáng)鵬宇陳立
航空學(xué)報(bào) 2018年8期
李國(guó)強(qiáng),常智強(qiáng),張?chǎng)危?yáng)鵬宇,陳立
1. 中國(guó)空氣動(dòng)力研究與發(fā)展中心 空氣動(dòng)力學(xué)國(guó)家重點(diǎn)實(shí)驗(yàn)室,綿陽(yáng) 621000 2. 中國(guó)空氣動(dòng)力研究與發(fā)展中心 低速空氣動(dòng)力學(xué)研究所,綿陽(yáng) 621000
翼型動(dòng)態(tài)失速是指機(jī)翼或葉片的當(dāng)?shù)赜浅尸F(xiàn)周期變化或急劇變化時(shí)繞流附面層大范圍分離帶來(lái)的一種強(qiáng)烈的非線性、非定常流動(dòng)現(xiàn)象,動(dòng)態(tài)失速渦脫離翼型后緣流向下游時(shí),會(huì)引發(fā)升力急劇下降、阻力迅速增大的失速和顫振問題[1]。這種現(xiàn)象普遍存在于直升機(jī)旋翼后行槳葉、快速俯仰機(jī)動(dòng)的戰(zhàn)斗機(jī)、偏航運(yùn)動(dòng)的風(fēng)力機(jī)和旋轉(zhuǎn)喘振的壓氣機(jī)上[2-4]。失控的動(dòng)態(tài)失速會(huì)限制直升機(jī)的飛行包線,導(dǎo)致戰(zhàn)斗機(jī)高機(jī)動(dòng)操作失穩(wěn),引起風(fēng)力機(jī)葉片氣動(dòng)效率驟降,減小壓氣機(jī)高速運(yùn)行范圍。
近年來(lái),研究人員開始關(guān)注如何利用流動(dòng)控制技術(shù)抑制動(dòng)態(tài)分離流的產(chǎn)生和發(fā)展,改善翼型動(dòng)態(tài)失速的負(fù)面效應(yīng)。流動(dòng)控制技術(shù)根據(jù)是否向流場(chǎng)注入能量可分為被動(dòng)流動(dòng)控制技術(shù)和主動(dòng)流動(dòng)控制技術(shù)。被動(dòng)控制技術(shù)主要是通過改變翼型形狀或者增加活動(dòng)部件,來(lái)改變翼型附近的流場(chǎng),改善動(dòng)態(tài)失速[5-6],常見的被動(dòng)控制技術(shù)有氣彈適應(yīng)葉片、渦流發(fā)生器、翼刀、鋸齒后緣、葉尖小翼、后緣偏轉(zhuǎn)襟翼、格尼襟翼、后緣變形、前緣變形等[6-10],然而這類技術(shù)一般控制周期較長(zhǎng),且難以根據(jù)復(fù)雜工況自適應(yīng)調(diào)整變化。主動(dòng)流動(dòng)控制是在流動(dòng)環(huán)境中直接注入合適的擾動(dòng),使其與系統(tǒng)內(nèi)流動(dòng)發(fā)生某種相互作用來(lái)達(dá)到控制目的。主動(dòng)控制技術(shù)有邊界層吹/吸氣[11]、合成射流[12-14]、介質(zhì)阻擋放電(Dielectric Barrier Discharge, DBD)等離子體激勵(lì)[15]等,這類技術(shù)能夠?qū)?fù)雜的動(dòng)態(tài)過程進(jìn)行精準(zhǔn)、高效的相位控制。DBD等離子體激勵(lì)結(jié)構(gòu)簡(jiǎn)單、控制位置靈活、響應(yīng)時(shí)間短、激勵(lì)頻帶寬,且激勵(lì)器厚度較薄,對(duì)翼型氣動(dòng)外形影響很小,在抑制分離、增加升力、減小阻力和推遲失速等方面具有廣闊的應(yīng)用前景[16]。其利用產(chǎn)生的誘導(dǎo)渦和射流來(lái)擾動(dòng)流場(chǎng),從而降低動(dòng)態(tài)失速渦的強(qiáng)度[17],使翼面壓力更加均勻,這樣在過失速狀態(tài)下翼型能獲得更加穩(wěn)定的邊界層[18]。本文所使用的正弦交流等離子體激勵(lì)已經(jīng)被證實(shí)在馬赫數(shù)(Ma)為0.4、雷諾數(shù)(Re)為200萬(wàn)時(shí)能夠有效抑制流動(dòng)分離[19],在動(dòng)態(tài)失速控制方面極具工程應(yīng)用潛力。

1 試驗(yàn)系統(tǒng)
1.1 風(fēng) 洞
試驗(yàn)在中國(guó)空氣動(dòng)力研究與發(fā)展中心FL-11風(fēng)洞中完成,該風(fēng)洞是一座低速回流式風(fēng)洞,其試驗(yàn)段入口尺寸為1.8 m(寬)×1.4 m(高),出口尺寸為1.84 m(寬)×1.4 m(高),長(zhǎng)度為5.8 m,模型中心距試驗(yàn)段入口下游2.6 m。風(fēng)速低于70 m/s 時(shí)湍流度達(dá)到0.000 8,軸向靜壓梯度優(yōu)于0.005,試驗(yàn)穩(wěn)定風(fēng)速范圍為10~105 m/s。
1.2 驅(qū)動(dòng)裝置
驅(qū)動(dòng)裝置由控制柜、電機(jī)、減速機(jī)、電機(jī)支座和傳動(dòng)軸組件構(gòu)成。電機(jī)為松下MSMA系列的3 kW 交流伺服電機(jī),減速機(jī)為PL120型行星減速機(jī)。運(yùn)動(dòng)控制系統(tǒng)如圖1(a)所示,振蕩運(yùn)動(dòng)規(guī)律由驅(qū)動(dòng)器變速運(yùn)動(dòng)實(shí)現(xiàn),控制系統(tǒng)采用位置伺服控制技術(shù),主要由位控板(全數(shù)字運(yùn)動(dòng)控制器)、全數(shù)字交流伺服系統(tǒng)、減速機(jī)和角位移傳感器組成。試驗(yàn)時(shí)翼型模型豎直放置于風(fēng)洞中心,由驅(qū)動(dòng)裝置通過傳動(dòng)軸驅(qū)動(dòng)翼型作俯仰振蕩,如圖1(b)(圖中FRP為玻璃鋼)所示。實(shí)現(xiàn)俯仰振蕩的核心就是用“電子凸輪”取代機(jī)械凸輪,不但簡(jiǎn)化了機(jī)械裝置結(jié)構(gòu),還實(shí)現(xiàn)了振蕩頻率和振蕩角度的無(wú)級(jí)變化。
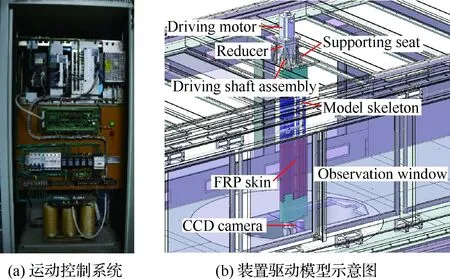
圖1 驅(qū)動(dòng)裝置Fig.1 Driving device
1.3 試驗(yàn)?zāi)P?/h3>
如圖2所示,試驗(yàn)?zāi)P蜑镾809翼型,其弦長(zhǎng)為300 mm,展長(zhǎng)為1 400 mm,展弦比為4.67,俯仰振蕩傳動(dòng)軸位于1/4弦長(zhǎng)處。模型試驗(yàn)阻塞度范圍為3.5%(0°迎角)~8.3%(30°迎角)。模型設(shè)計(jì)的基本要求是結(jié)構(gòu)質(zhì)量輕、慣量小、強(qiáng)度高,采用玻璃鋼蒙皮和鋁合金骨架結(jié)構(gòu),中間加鋪PMI(Polymethacrylimide)泡沫芯材,模型重量為35 kg,慣量為0.2 kg·m2。模型中間剖面為動(dòng)態(tài)壓力測(cè)量剖面,共布置27個(gè)內(nèi)徑為1.6 mm的測(cè)壓孔;距離中間剖面300 mm的截面共布置51個(gè)內(nèi)徑為0.6 mm 的靜壓測(cè)壓孔。模型內(nèi)鋪設(shè)參考?jí)很浌芎?08根壓力信號(hào)傳輸電纜,并從模型一端引出;51根 靜壓管路則從另一端引出。模型開設(shè)可拆卸式蓋板,方便指定位置壓力傳感器的安裝及拆卸。
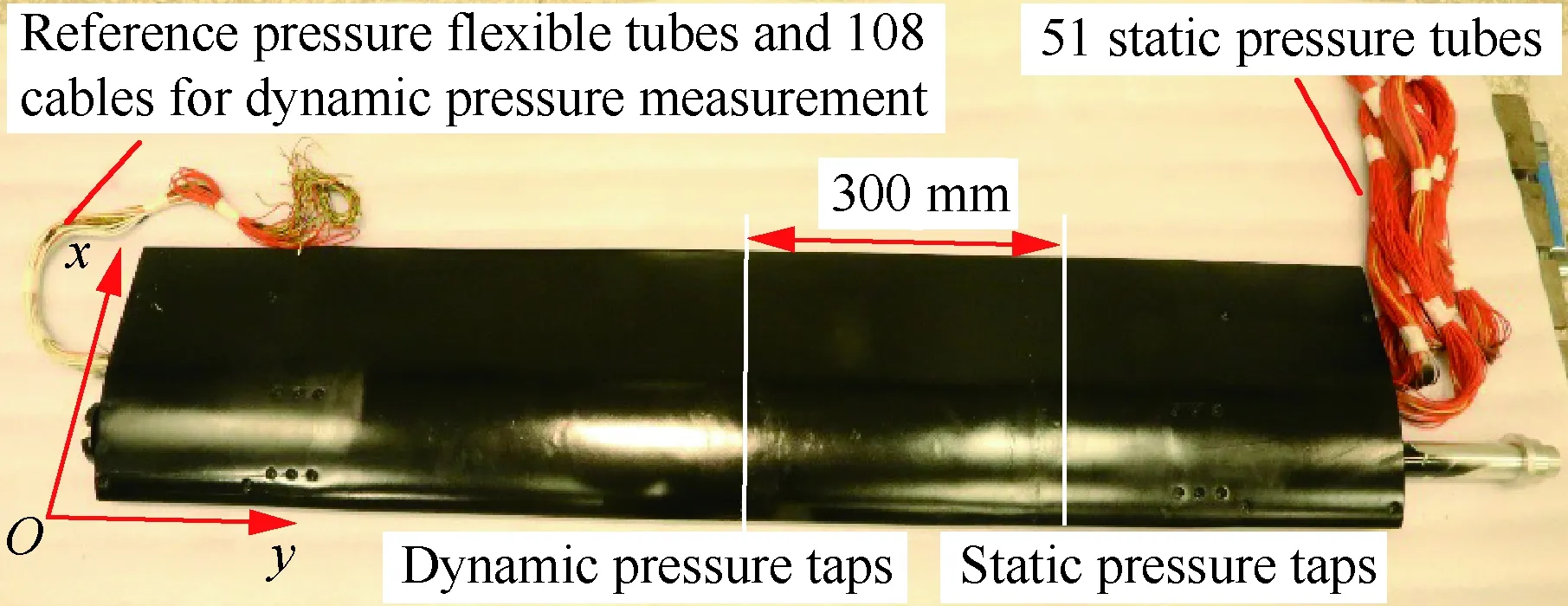
圖2 S809翼型模型Fig.2 S809 airfoil model
1.4 激勵(lì)裝置
激勵(lì)電源小型化與遠(yuǎn)程無(wú)線控制是等離子體流動(dòng)控制技術(shù)實(shí)現(xiàn)工程化應(yīng)用的難點(diǎn)。采用由德國(guó)GBS Elektronik公司研制的Minipuls 0.1小型高壓電源作為激勵(lì)電源,如圖3所示,通過二次開發(fā)及編寫控制軟件,實(shí)現(xiàn)了對(duì)小型電源的無(wú)線遠(yuǎn)程控制。該電源主要由升壓電路板、驅(qū)動(dòng)電路板以及鋰電池組成,電源的性能指標(biāo)詳見表1,升壓電路板尺寸為150 mm(長(zhǎng))×86 mm(寬)×21 mm(高),驅(qū)動(dòng)電路板尺寸為115 mm(長(zhǎng))×64 mm(寬)×30 mm (高),單塊鋰電池尺寸為90 mm(長(zhǎng))×35 mm (寬)×65 mm(高)。該電源首先將鋰電池與驅(qū)動(dòng)電路板連接,通過驅(qū)動(dòng)電路板中的橋式轉(zhuǎn)換器產(chǎn)生低電壓方波;升壓電路板包括6個(gè)變壓器,先通過其中1個(gè)變壓器以濾波的方式將電壓方波輸出為正弦波,然后在其他5個(gè)串聯(lián)變壓器的作用下,將低電壓正弦波轉(zhuǎn)換為高電壓正弦波。激勵(lì)電源供電電壓為15~35 V,采用由BUILD POWER公司生產(chǎn)的1 400 mA·h鋰電池,其充滿電壓為22.5 V,額定容量為1 400 mA·h,額定倍率為25C,質(zhì)量為242 g。經(jīng)過升壓電路放大后的實(shí)測(cè)激勵(lì)電壓幅值為5.3 kV,激勵(lì)頻率為5.6 kHz。
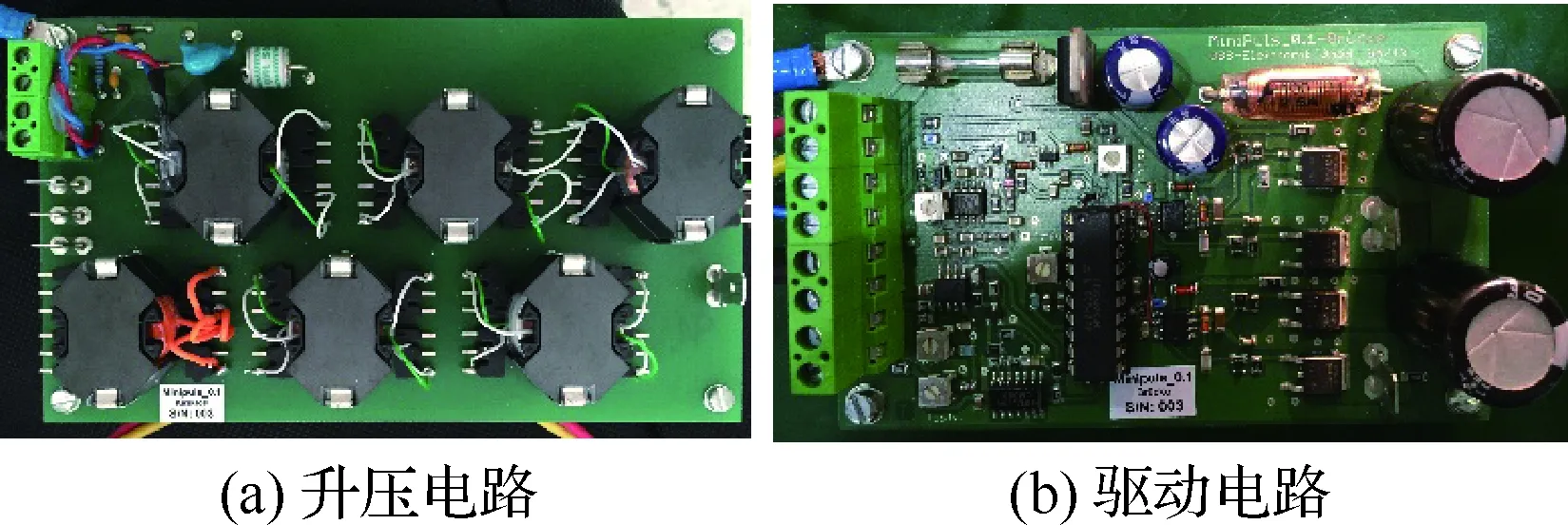
圖3 Minipuls 0.1高壓電源Fig.3 Minipuls 0.1 high voltage power supply
表1 Minipuls 0.1高壓電源性能指標(biāo)
Table 1 Performance indexes of Minipuls 0.1 high
voltage power supply

ParameterValuePeak range of voltage/kV0-12(p-p)Actuation frequency range/kHz5-20Duty cycle/%0-100Pulse frequency/Hz0-250Power supply/W30Weight/g340
試驗(yàn)采用非對(duì)稱布局形式的DBD等離子體激勵(lì)器,其結(jié)構(gòu)和布置如圖4所示。激勵(lì)器由兩個(gè)平行銅箔電極(暴露電極、植入電極)和Kapton介質(zhì)薄膜組成。兩個(gè)電極的寬度分別為3 mm和5 mm,中間間隙為零,Kapton薄膜介電常數(shù)為3.0,單層厚度為0.075 mm,耐壓峰峰值為10 kV。當(dāng)向兩個(gè)電極間施加高頻高壓交流電時(shí),暴露電極周圍產(chǎn)生等離子體,在激勵(lì)器上方的非對(duì)稱電場(chǎng)作用下,形成體積力[24],并誘導(dǎo)出指向植入電極的壁面射流[25]。
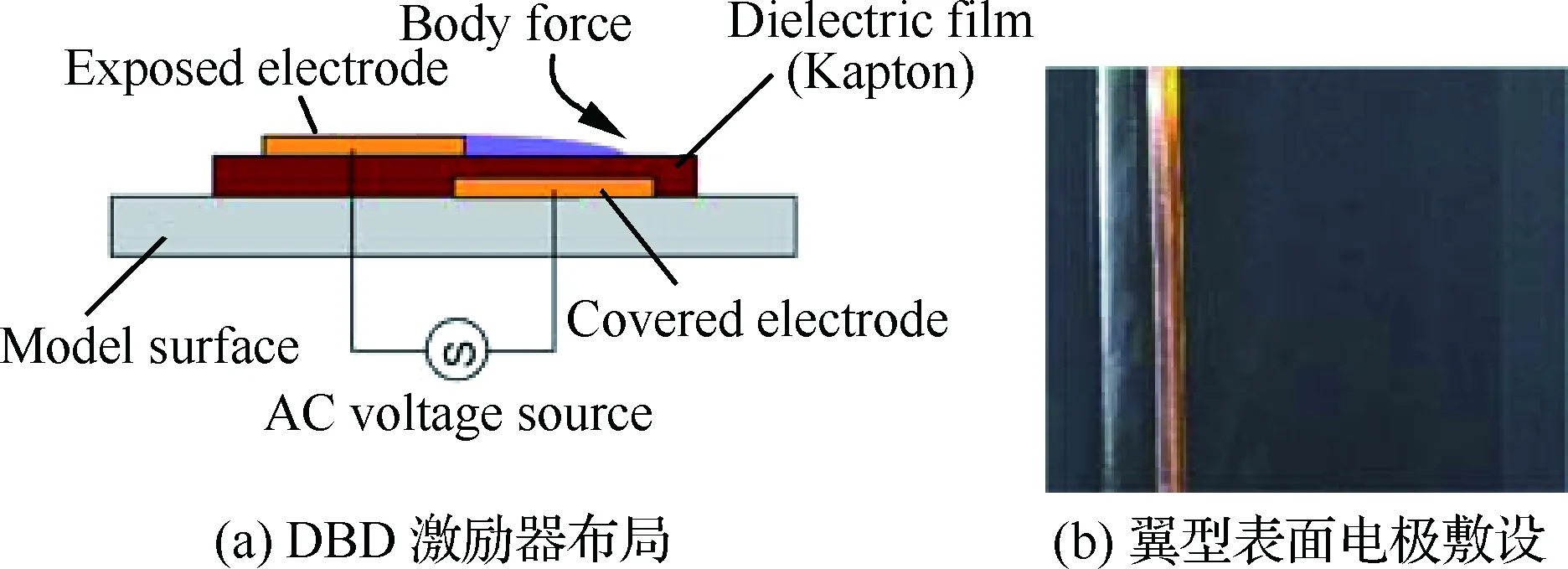
圖4 DBD激勵(lì)器Fig.4 DBD actuator
1.5 測(cè)試設(shè)備
1) 角位移傳感器
動(dòng)態(tài)試驗(yàn)角位移信號(hào)是重要的試驗(yàn)參數(shù),采集時(shí)要與壓力傳感器感受的氣動(dòng)荷載同步記錄,用該位移信號(hào)觸發(fā)數(shù)據(jù)采集系統(tǒng)實(shí)現(xiàn)壓力傳感器信號(hào)的同步采集。安裝于試驗(yàn)?zāi)P投说慕俏灰苽鞲衅鞯妮敵鲂盘?hào)與交流伺服電機(jī)端的光電編碼器輸出信號(hào)同時(shí)作用于運(yùn)動(dòng)控制器,構(gòu)成位置反饋雙閉環(huán)伺服控制系統(tǒng),實(shí)現(xiàn)振蕩運(yùn)動(dòng)規(guī)律的精確控制。角位移傳感器采用瑞士CONTELEC公司研制的GL300型電位計(jì)。
2) 動(dòng)態(tài)壓力傳感器
測(cè)壓元件采用ENDVECO公司的8510B系列差壓式動(dòng)態(tài)壓力傳感器,單個(gè)傳感器連接4根電纜,并引入?yún)⒖級(jí)杭皽y(cè)量端壓力兩根測(cè)壓軟管。傳感器信號(hào)線纜通過J30J-37型轉(zhuǎn)接頭與8根雙絞雙屏蔽軟電纜快速連接,實(shí)現(xiàn)傳感器供電和信號(hào)傳輸,采用兩臺(tái)Tectronix PWS4305 DC電源串聯(lián)實(shí)現(xiàn)±5 V供電。
3) 風(fēng)速管
參考速壓用T4-800型風(fēng)速管測(cè)量得到,風(fēng)速管的靜壓管和總壓管接入壓力采集系統(tǒng)進(jìn)行實(shí)時(shí)采集。風(fēng)速管安裝在靠翼型下翼面一側(cè)試驗(yàn)段上游位置,既保證了對(duì)翼型周圍流場(chǎng)的干擾較小又能實(shí)時(shí)準(zhǔn)確測(cè)量出來(lái)流的實(shí)時(shí)速壓,在風(fēng)洞中的安裝如圖5所示。
4) PIV系統(tǒng)及外觸發(fā)裝置
試驗(yàn)采用LaVision公司的TR-PIV (Time-Resolved Particle Image Velocimetry)系統(tǒng),采用單CCD相機(jī)二維PIV測(cè)量方案。TR-PIV系統(tǒng)主要由HS5.1高速相機(jī)系統(tǒng)、激光器系統(tǒng)、控制器、高性能計(jì)算機(jī)及采集處理軟件組成,如圖6(a)所示。試驗(yàn)用DEHS(癸二酸二辛酯)示蹤粒子采用加熱型的DF-1500粒子播放器播撒。PIV相機(jī)采用外觸發(fā)方式觸發(fā),外觸發(fā)信號(hào)為TTL電頻格式方波信號(hào),上升沿為5 V時(shí)觸發(fā),觸發(fā)后PIV系統(tǒng)可按照內(nèi)部時(shí)鐘采集,相機(jī)布置在翼型下方并與傳動(dòng)軸固連隨動(dòng),可拍攝翼型吸力面上方300 mm×300 mm區(qū)域的激光照射截面。設(shè)計(jì)的電子外觸發(fā)裝置如圖6(b)所示,將電位計(jì)采集信號(hào)傳給觸發(fā)裝置進(jìn)行標(biāo)定,當(dāng)翼型振蕩到達(dá)設(shè)定好的采集角后,由觸發(fā)裝置觸發(fā)相機(jī)進(jìn)行采集記錄。外觸發(fā)系統(tǒng)由電位計(jì)傳感器、電壓信號(hào)采集卡、實(shí)時(shí)控制器和數(shù)字信號(hào)輸出卡組成。利用電位計(jì)傳感器信號(hào),可判斷翼型振蕩運(yùn)動(dòng)方向,實(shí)時(shí)解算獲得角度值。
5) PXI數(shù)采系統(tǒng)
PXI總線數(shù)據(jù)采集系統(tǒng)主要由前置放大器、數(shù)據(jù)采集器、通訊卡、控制計(jì)算機(jī)和數(shù)據(jù)處理計(jì)算機(jī)等部分組成,并配套編寫相應(yīng)的數(shù)據(jù)采集和處理程序。
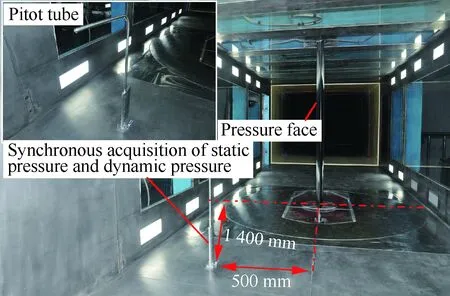
圖5 實(shí)時(shí)速壓測(cè)量風(fēng)速管Fig.5 Pitot-static tube for real-time measurement of wind speed
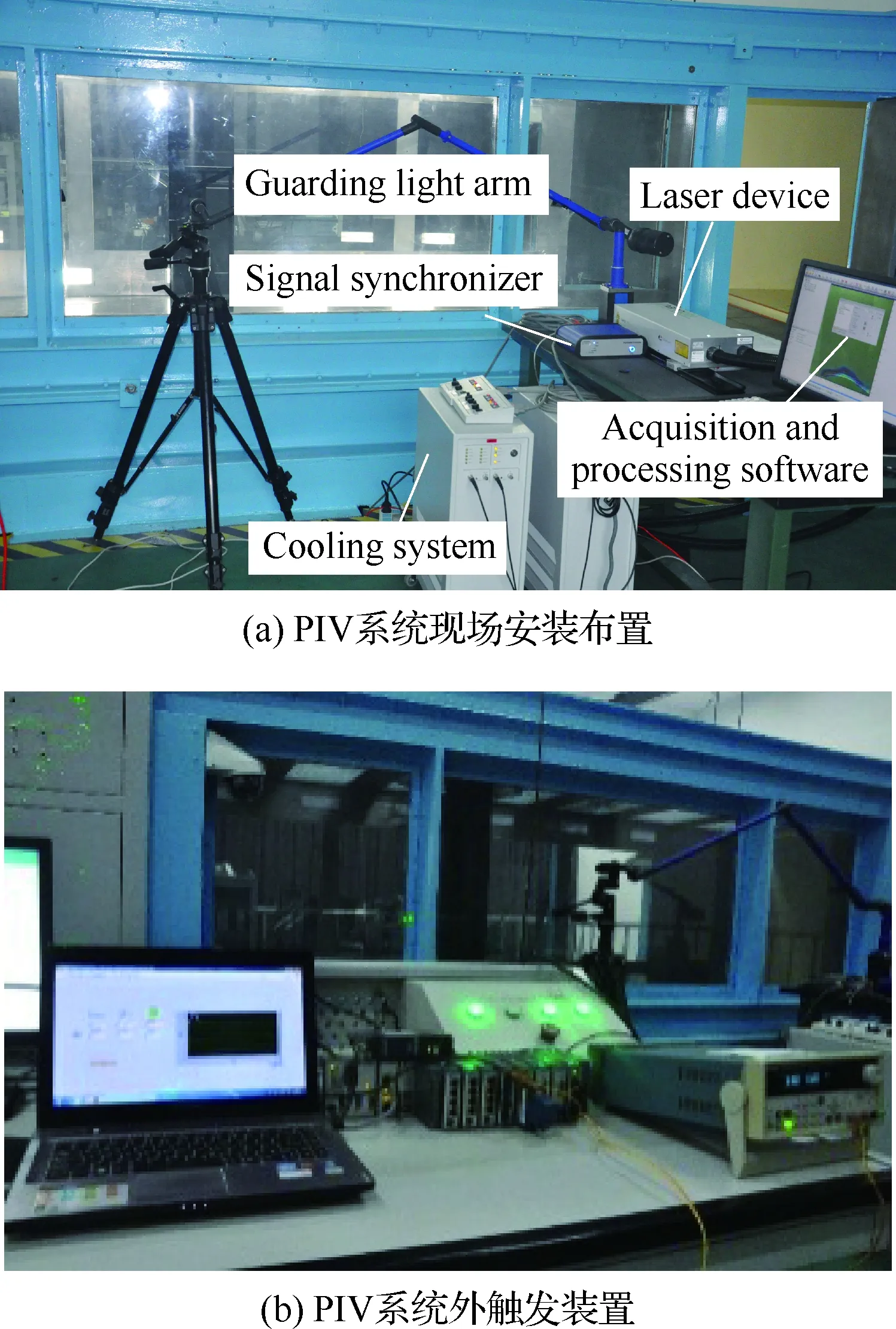
圖6 翼型俯仰振蕩試驗(yàn)PIV系統(tǒng)及外觸發(fā)裝置Fig.6 PIV system and external triggering device for airfoil pitching oscillation test
2 數(shù)據(jù)處理方法
壓力系數(shù)計(jì)算表達(dá)式為
(1)
式中:Cpi為測(cè)壓點(diǎn)壓力系數(shù);pi為測(cè)壓點(diǎn)靜壓;p∞為來(lái)流靜壓;ρ為來(lái)流密度;p0為來(lái)流總壓;q∞為來(lái)流動(dòng)壓。
以上完成后進(jìn)行壓力積分,計(jì)算法向力系數(shù)、軸向力系數(shù)。
作用在翼型上的法向力系數(shù)CN和軸向力系數(shù)CA通過積分翼型表面壓力分布獲得,通過內(nèi)插值獲得整個(gè)函數(shù)區(qū)間的函數(shù)值后,根據(jù)函數(shù)值進(jìn)行數(shù)值積分,其積分公式為
(2)
(3)

根據(jù)升力系數(shù)和壓差阻力系數(shù)的定義,可以得到翼型升力系數(shù)CL和壓差阻力系數(shù)CD分別為
CL=CNcosα-CAsinα
(4)
CD=CNsinα+CAcosα
(5)
3 數(shù)據(jù)對(duì)比考核

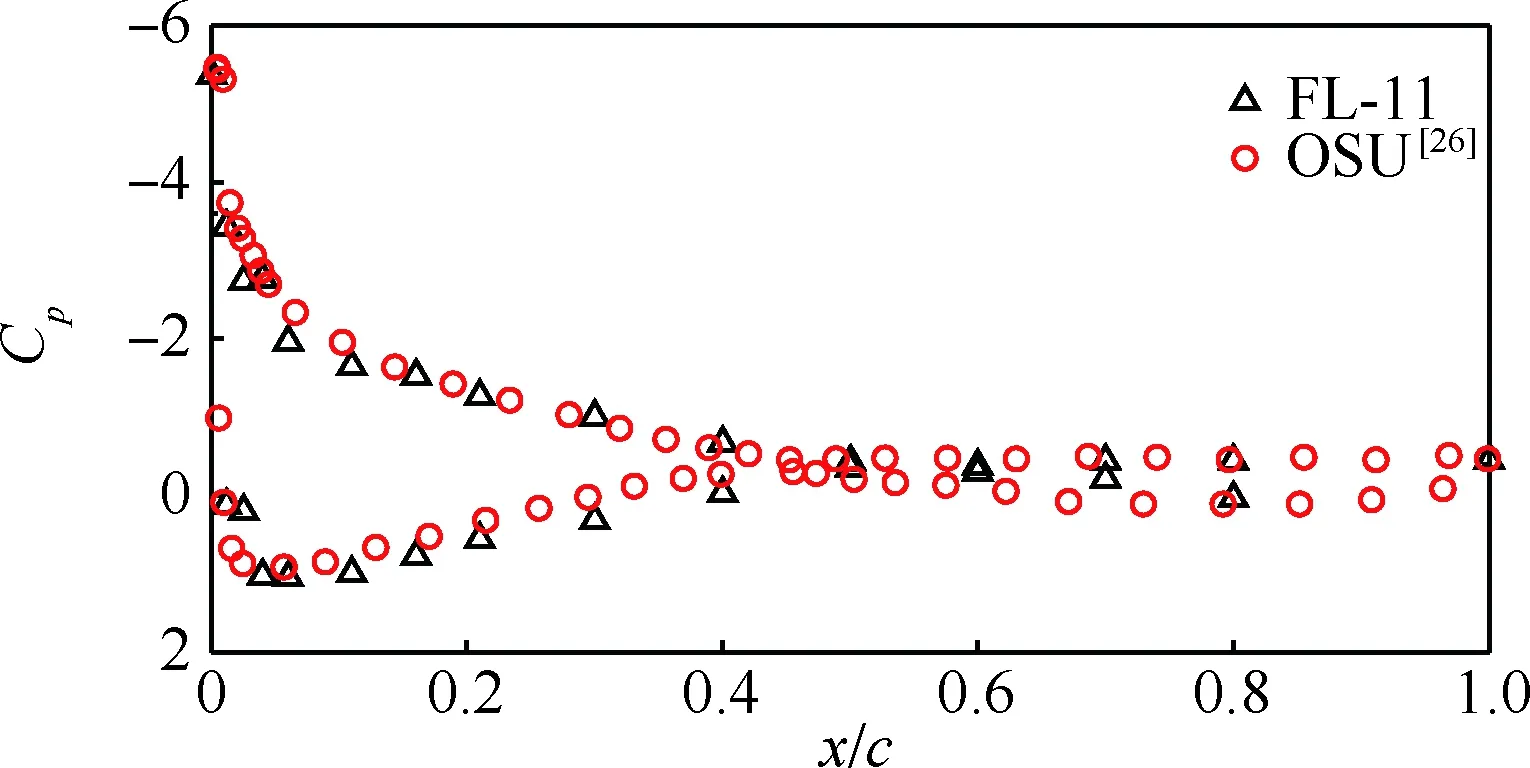
圖7 迎角為16.1°下翼型表面壓力分布的FL-11與 OSU風(fēng)洞數(shù)據(jù)對(duì)比Fig.7 Comparison of surface pressure distribution of airfoil between FL-11 and OSU tunnel data at 16.1 ° angle of attack
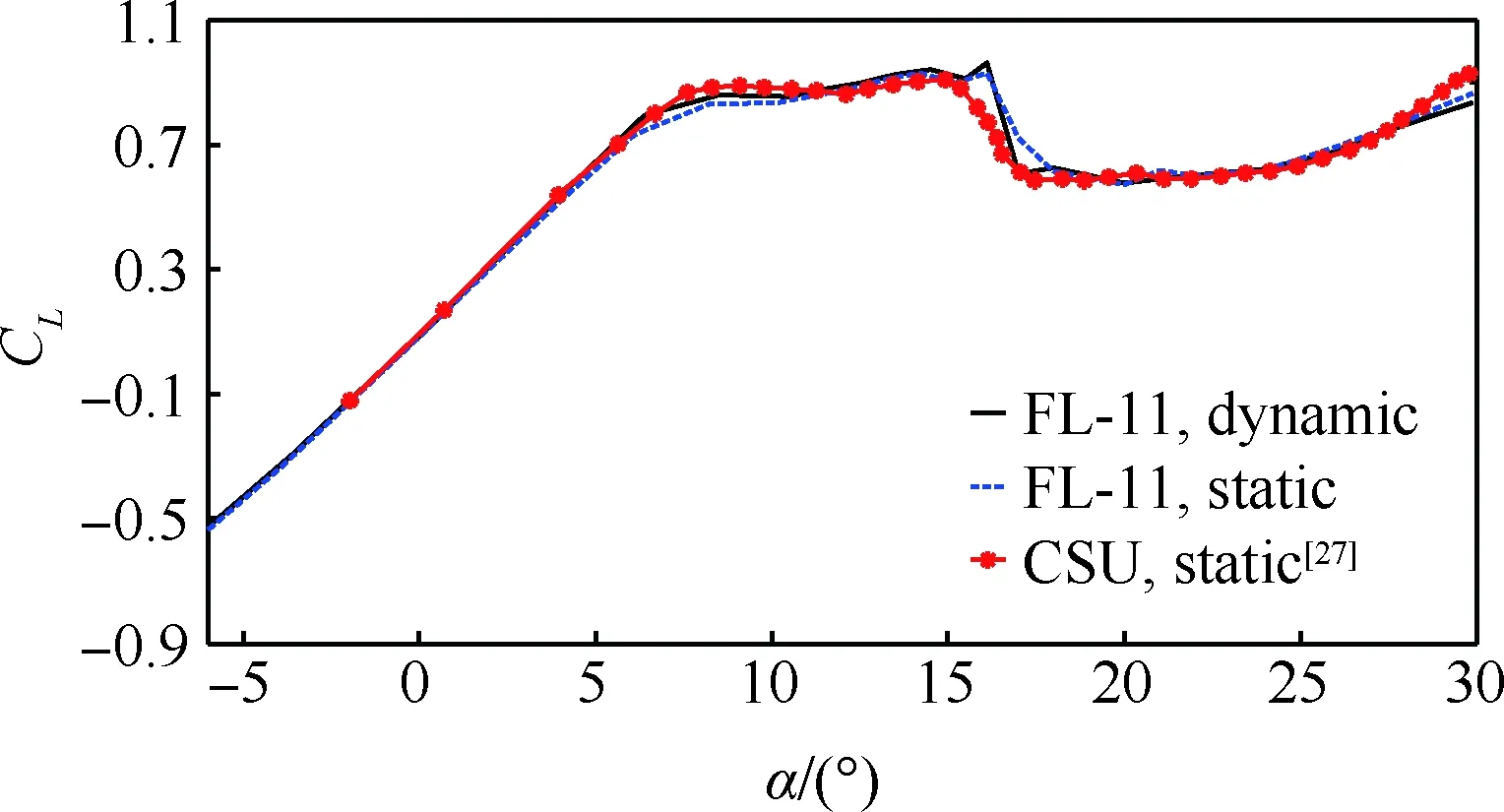

圖8 動(dòng)態(tài)壓力傳感器測(cè)得的翼型CL曲線Fig.8 CL curves of airfoil measured by dynamic pressure sensors
4 試驗(yàn)結(jié)果分析
4.1 等離子體對(duì)翼型動(dòng)態(tài)氣動(dòng)性能的改善
研究表明在流動(dòng)分離起始點(diǎn)的前緣附近施加DBD等離子體激勵(lì)可以取得最好的效果[28],本文的激勵(lì)器敷設(shè)在翼型上翼面距離前緣8.3%c的位置。在振幅α1=6.94°、平衡迎角α0=10.44°、振蕩頻率f=0.499 Hz下,翼型8個(gè)周期的平均氣動(dòng)力系數(shù)及誤差條隨迎角變化的曲線如圖9(a) 和圖9(b)所示,總體來(lái)看,施加等離子體控制后,翼型升力系數(shù)增加,阻力系數(shù)減小;翼型最大升力系數(shù)增加6.5%,平均升力系數(shù)增加7.1%,失速迎角推遲1.3°,遲滯環(huán)面積減小4.5%;在迎角為4°~9°范圍內(nèi),等離子體減阻效果明顯,平均阻力系數(shù)減小44.5%。由圖9(c)(圖中T為振蕩周期)可知,激勵(lì)器開啟后,翼型瞬態(tài)的升力系數(shù)均有明顯增加。圖9(d)表明,迎角為4°~9°范圍內(nèi),翼型升阻比明顯增加,由葉素理論可以推斷出翼型的工作效率也明顯增加;但在9°以上的迎角范圍內(nèi)翼型的升阻比增加并不明顯,這是由于等離子體激勵(lì)增加翼型升力的同時(shí),也增加了翼型的阻力。
圖10為等離子體控制前后翼型俯仰振蕩一個(gè)周期內(nèi)吸力面壓力分布的擬合三維圖,圖中Phase為翼型在振蕩周期內(nèi)所處的相位角。由圖可知x/c=0.2~0.4區(qū)域翼型上翼面壓力系數(shù)絕對(duì)值明顯增加(壓力系數(shù)為負(fù),即吸力明顯增加),x/c=0.4 以后的區(qū)域變化不明顯;相位為0°~90°和270°~360°范圍,對(duì)應(yīng)翼型俯仰振蕩周期內(nèi)的正行程3°~17°迎角范圍,施加等離子體控制后,上翼面的壓力系數(shù)絕對(duì)值明顯增加,即上翼面的吸力值明顯增加,從而使得圖9(a)所示的翼型升力系數(shù)明顯增加。
圖11為系統(tǒng)采集的16個(gè)周期的翼型表面壓力系數(shù)Cp平均成1個(gè)振蕩周期的數(shù)據(jù)結(jié)果。圖11(a) 為翼型上翼面x/c=0.11處(激勵(lì)器粘貼位置下游的第一個(gè)測(cè)壓點(diǎn))的Cp在振蕩周期內(nèi)隨著迎角的變化曲線,Cp為負(fù),即此處為吸力面負(fù)壓區(qū)。正行程3°~10°迎角段,翼型表面流動(dòng)附著良好,等離子體激勵(lì)器誘導(dǎo)射流增加了翼型附面層內(nèi)氣體的動(dòng)量,使得上翼面負(fù)壓的絕對(duì)值增加;12°~17°為翼型出現(xiàn)流動(dòng)分離的迎角區(qū)域,等離子體氣動(dòng)激勵(lì)抑制了翼型表面的流動(dòng)分離,從而使得吸力值增加;負(fù)行程9°~3°為翼型表面分離流動(dòng)的再附著區(qū),這也是分離渦向附著流的再重建過程,等離子體并沒有在這一階段明顯增加翼型表面的吸力。圖11(b)~圖11(e)分別為翼型正行程6°、負(fù)行程6°、正行程16°和負(fù)行程16°迎角下翼型的表面壓力系數(shù),可知上翼面在施加等離子體流動(dòng)控制以后,x/c=0.2~0.4區(qū)域的吸力明顯增加,其中正行程16°和負(fù)行程16°迎角下翼型表面的吸力峰值也均有明顯的增加。等離子體誘導(dǎo)翼面吸力的增加,可增大邊界層對(duì)周圍流場(chǎng)的吸附作用,即利用等離子激勵(lì)產(chǎn)生的低壓區(qū)將分離的流動(dòng)重新吸附回翼面上來(lái)[29]。
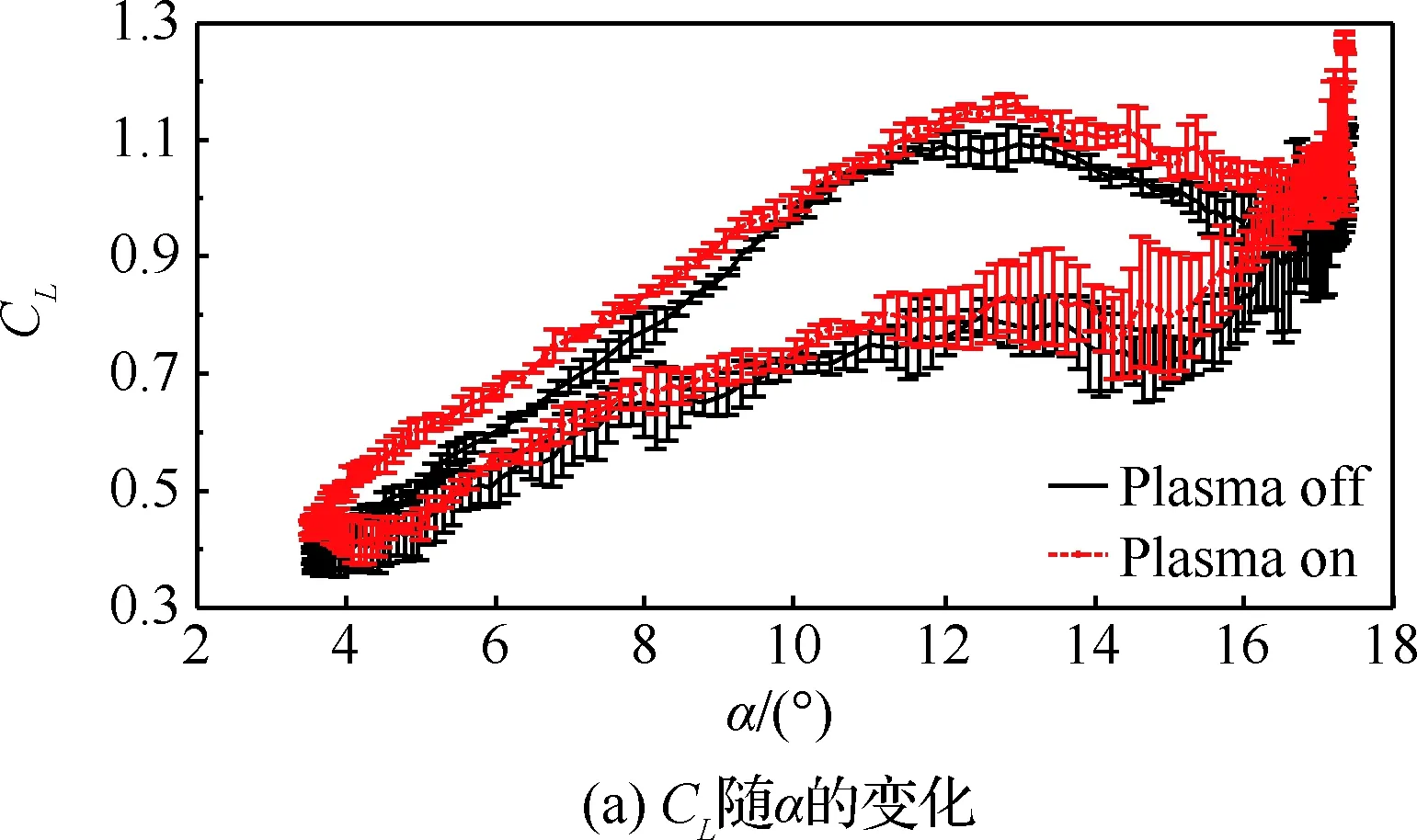
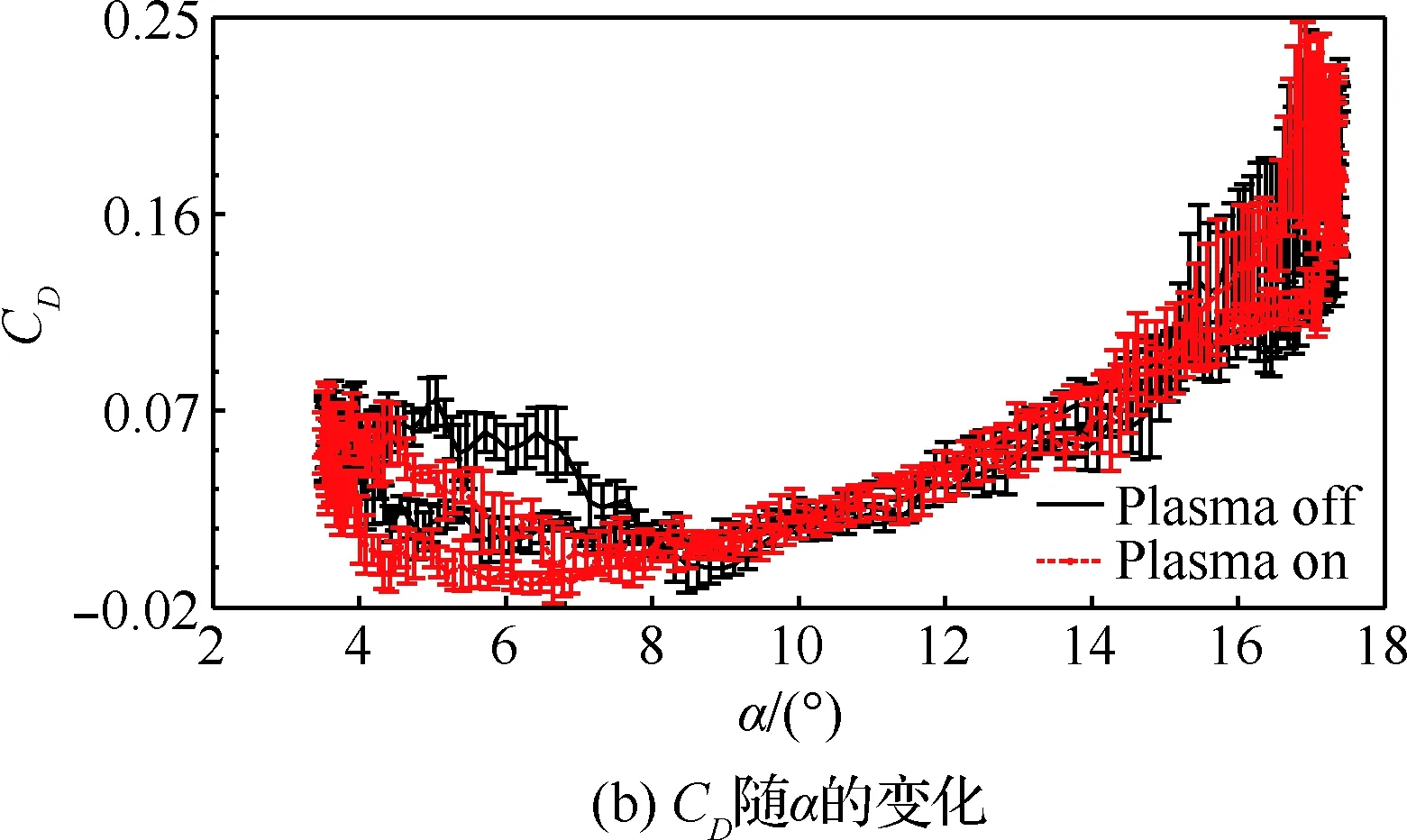
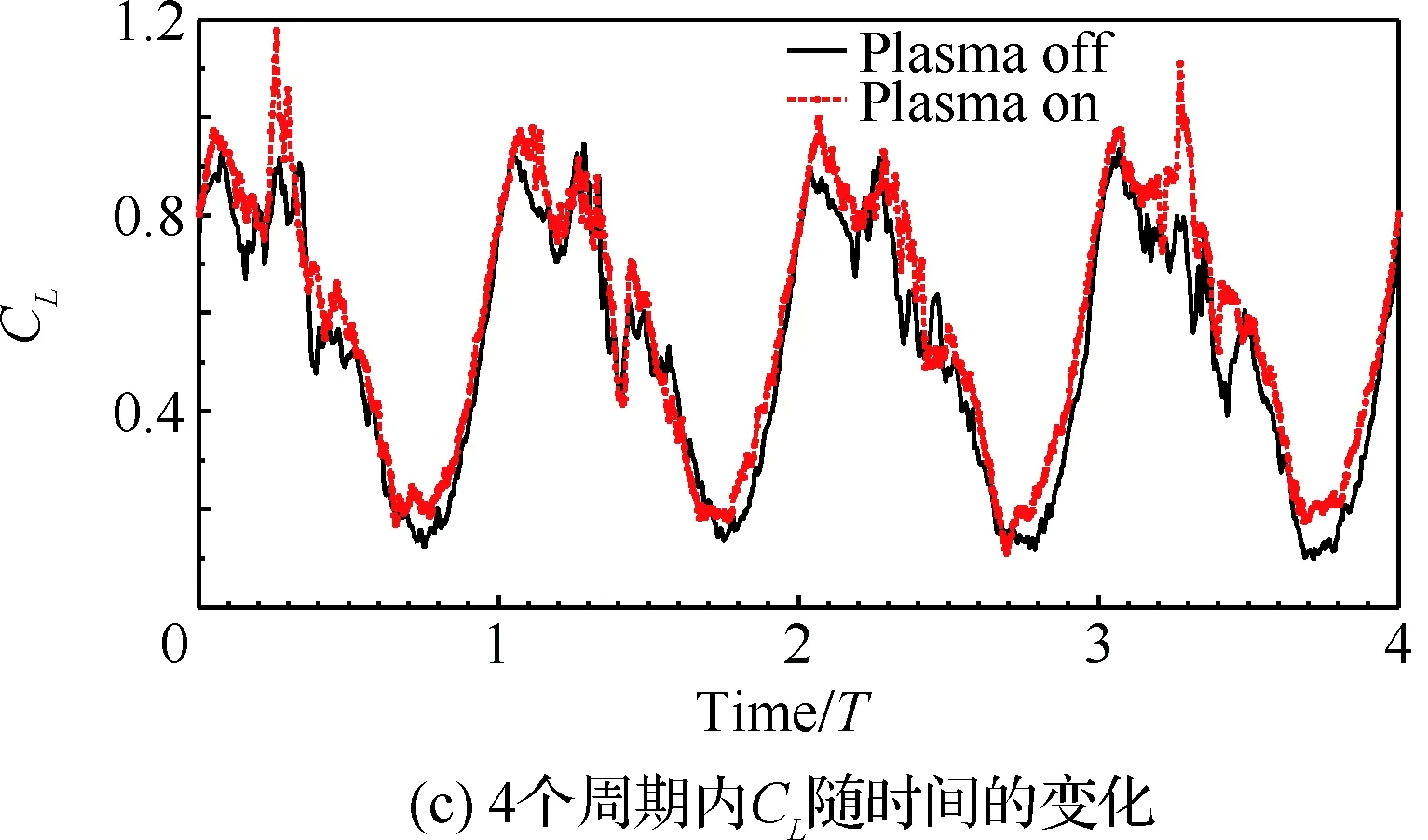
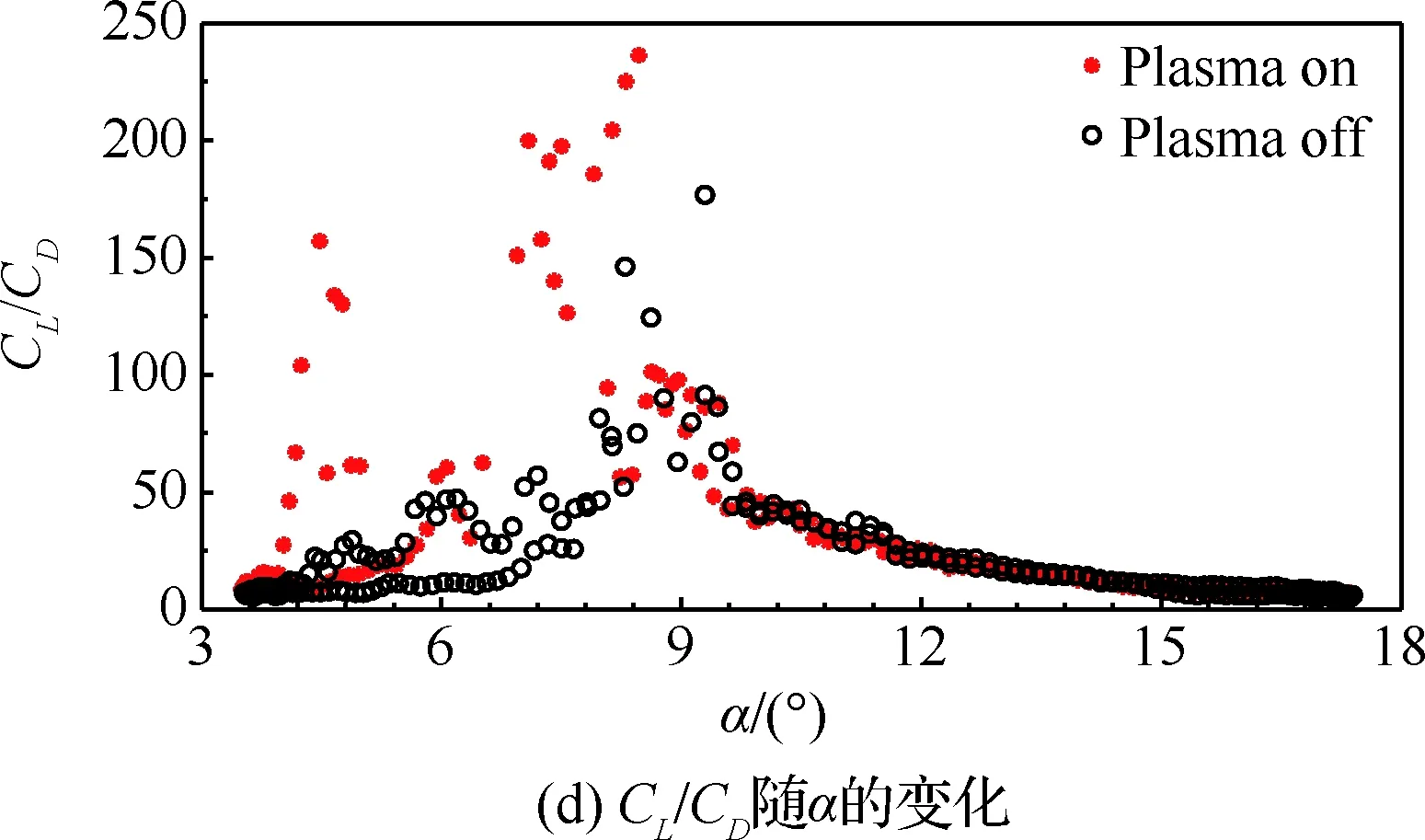
圖9 等離子體控制前后翼型的氣動(dòng)特性(α0=10.44°, α1=6.94°,f=0.499 Hz,V=10 m/s)Fig.9 Aerodynamic characteristics of airfoil with and without plasma (α0=10.44°, α1=6.94°, f=0.499 Hz, V=10 m/s)
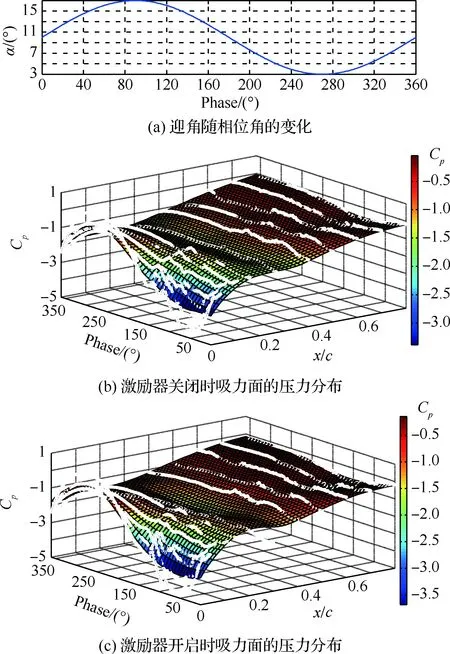
圖10 一個(gè)振蕩周期內(nèi)等離子體控制前后翼型吸力面 壓力分布(α0=10.44°,α1=6.94°,f=0.499 Hz, V=10 m/s)Fig.10 Suction side pressure distribution of airfoil with and without plasma in one oscillation cycle (α0= 10.44°, α1=6.94°, f=0.499 Hz, V=10 m/s)
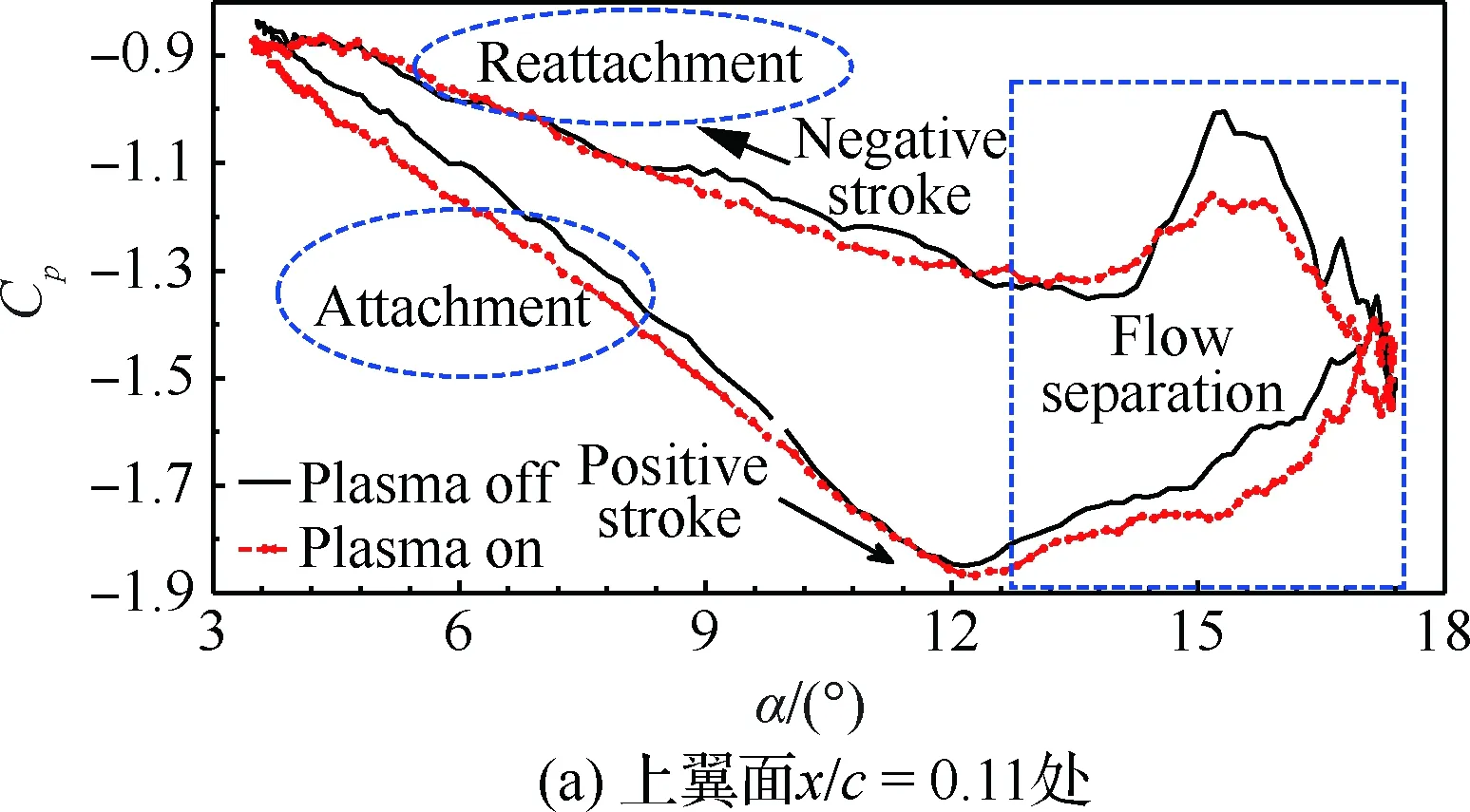
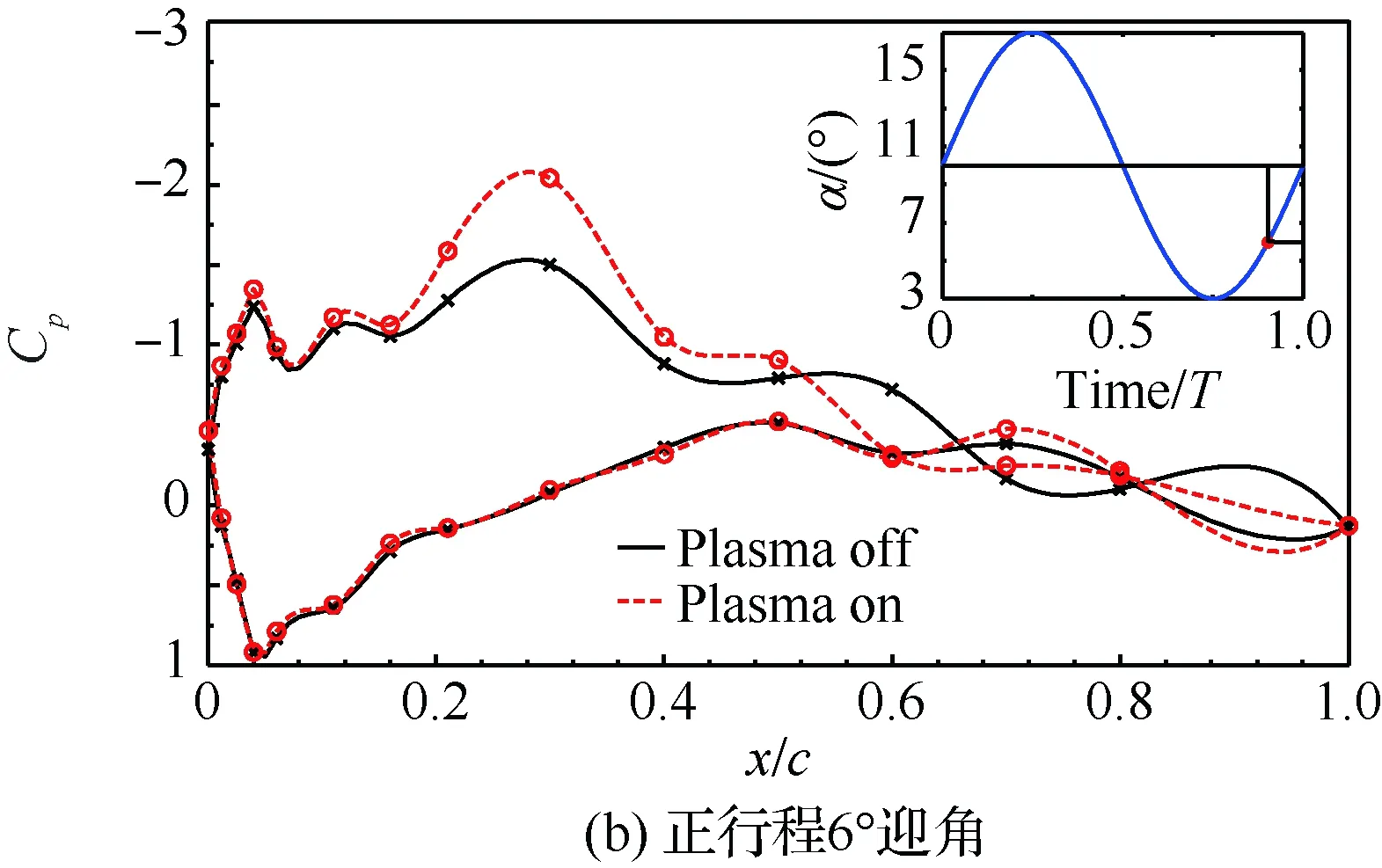
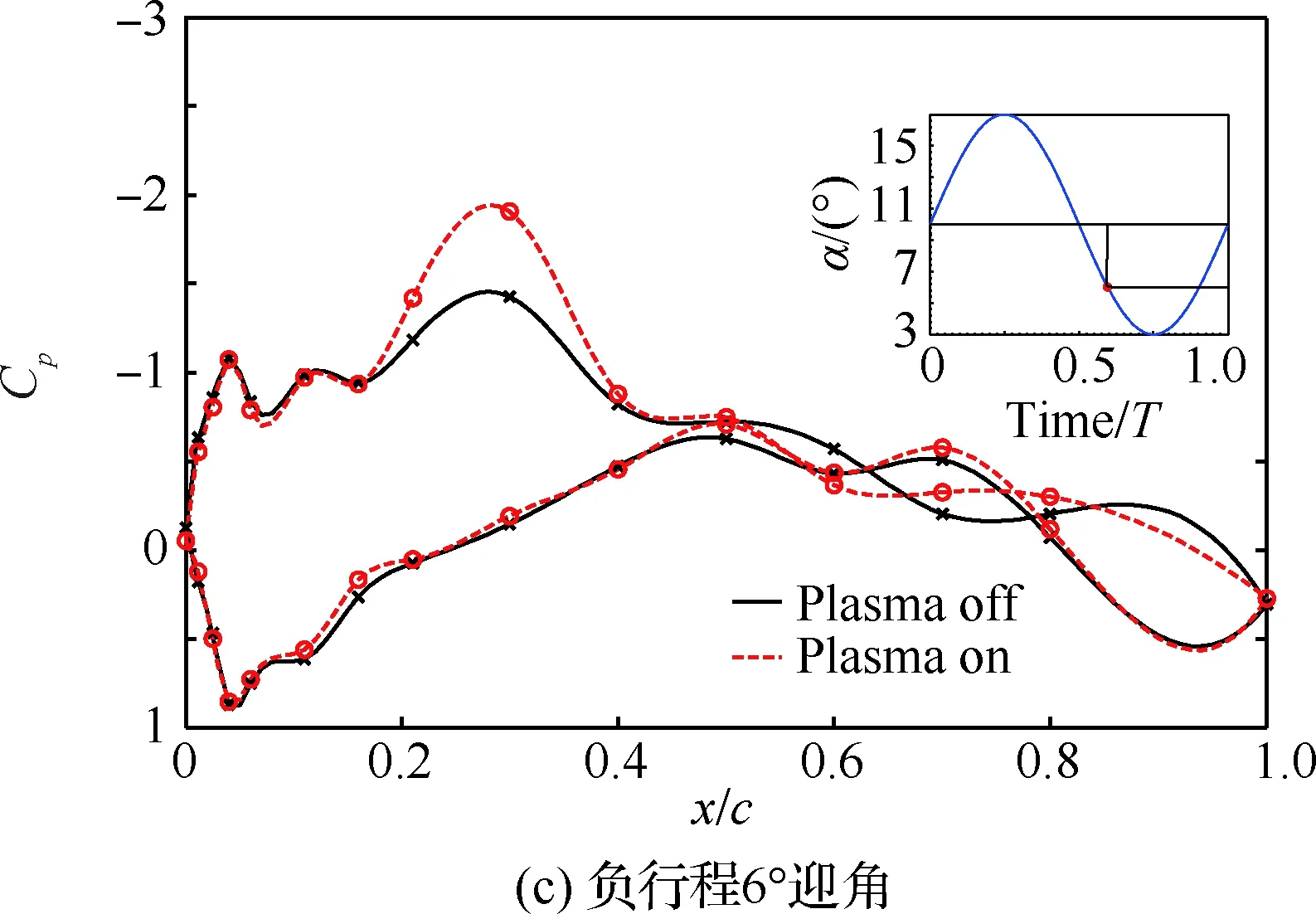
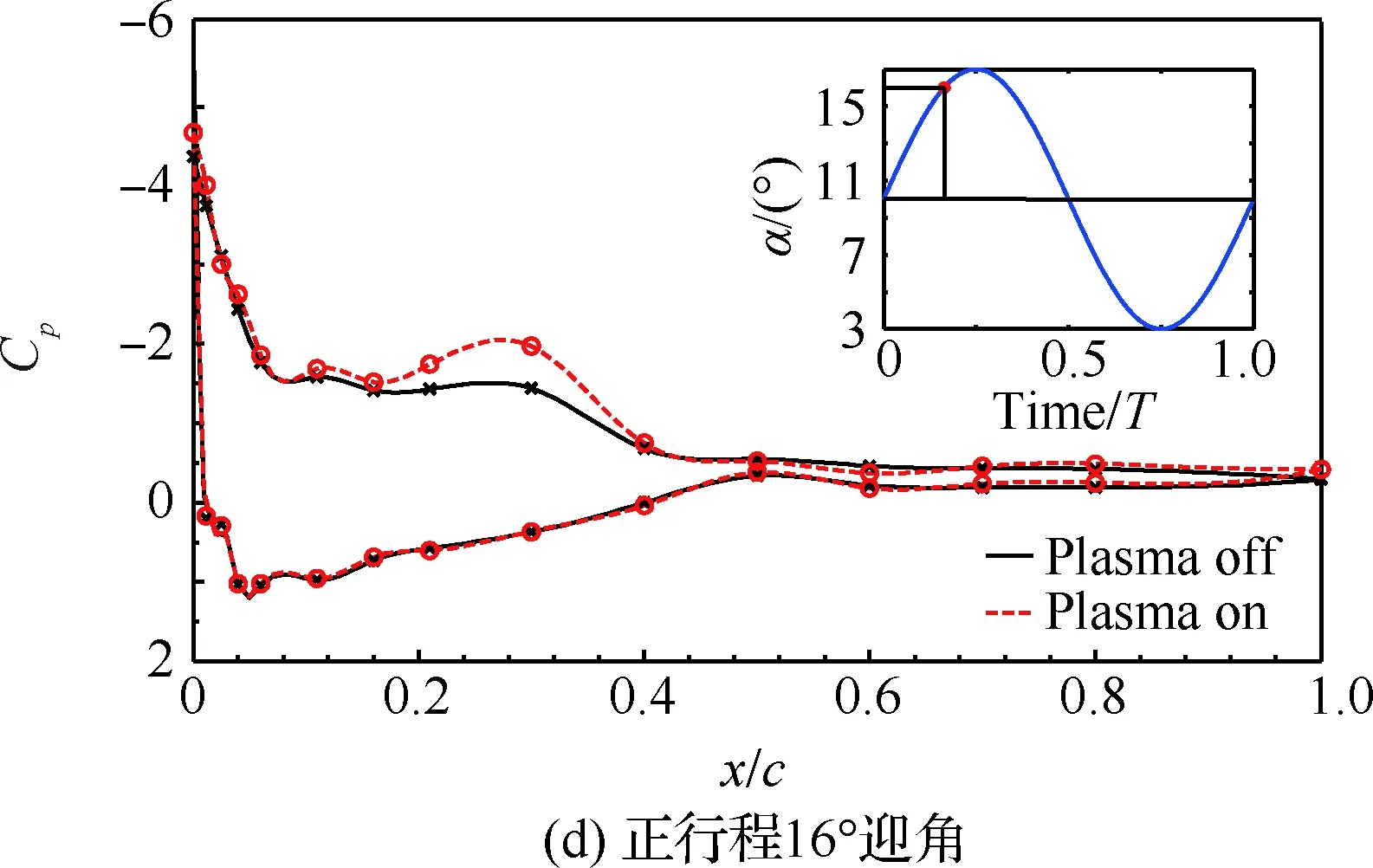
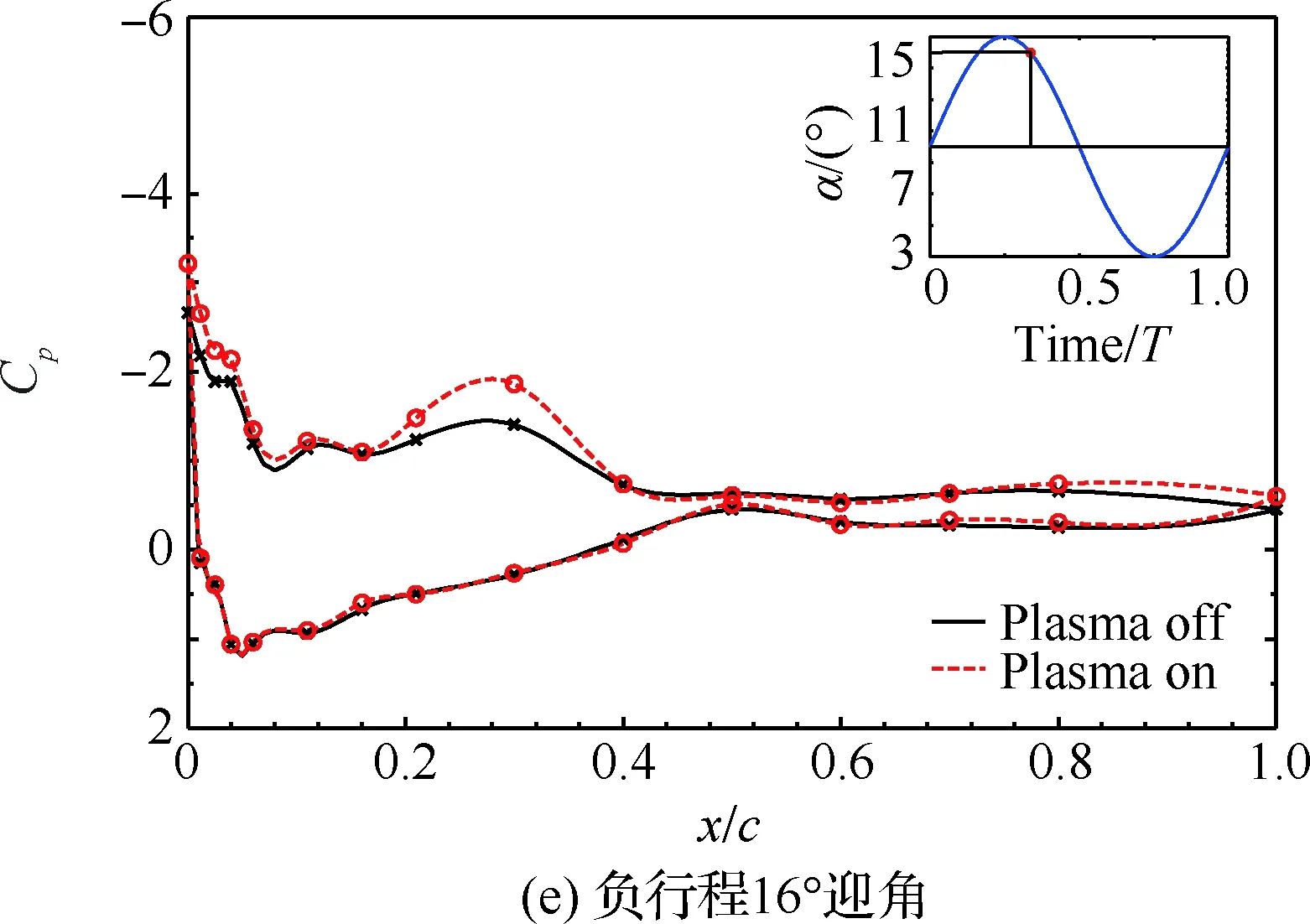
圖11 不同振蕩迎角下等離子體控制前后翼型表面壓力系數(shù) (α0=10.44°,α1=6.94°,f=0.499 Hz,V=10 m/s)Fig.11 Surface pressure coefficient of airfoil with and without plasma at different oscillation angles of attack (α0=10.44°, α1=6.94°, f=0.499 Hz, V=10 m/s)
對(duì)動(dòng)態(tài)壓力積分獲取的16個(gè)周期的瞬態(tài)CL進(jìn)行周期圖法(Periodograms)功率譜密度(Power Spectral Density, PSD)分析(f0為翼型振蕩頻率,f/f0為無(wú)量綱頻率),PSD分布如圖12所示,不同階次的能量集中反映了翼型振蕩過程中流場(chǎng)結(jié)構(gòu)的多尺度性和多頻率性。一階能量集中主要是由于俯仰振蕩運(yùn)動(dòng)引起,即受減縮頻率和振幅影響較大,由于施加等離子體流動(dòng)控制前后的運(yùn)動(dòng)工況一致,故PSD的一階能量集中基本一致;施加等離子體控制后二階、三階、四階能量集中的頻率一致,幅值明顯減小,這是由于等離子體氣動(dòng)激勵(lì)減弱了翼型動(dòng)態(tài)分離渦的強(qiáng)度。
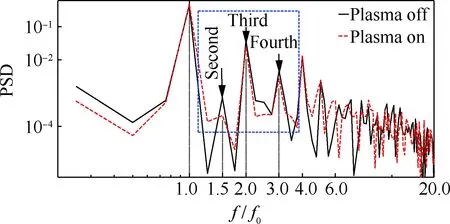
圖12 CL功率譜密度(α0=10.44°,α1=6.94°, f=0.499 Hz,V=10 m/s)Fig.12 Power spectral density of CL (α0=10.44°, α1=6.94°, f=0.499 Hz, V=10 m/s)
4.2 不同振蕩頻率下的等離子體控制
不同振蕩頻率下等離子體控制效果如圖13所示。振蕩頻率為0.75~1.25 Hz對(duì)應(yīng)的葉片偏航狀態(tài)下翼型非定常振蕩減縮頻率為0.07~0.12,隨著振蕩頻率的增加,翼型的最大升力系數(shù)、最大阻力系數(shù)、失速迎角和升力系數(shù)遲滯回線區(qū)域均增大,即流動(dòng)的非定常效應(yīng)增強(qiáng),且等離子體氣動(dòng)激勵(lì)推遲翼型失速和增升減阻的控制效果減弱。施加等離子體控制前后翼型的氣動(dòng)特性參數(shù)詳見表2,總體來(lái)看,等離子體使得翼型的動(dòng)態(tài)失速迎角αds增加、最大升力系數(shù)CLmax增加,平均升力系數(shù)CLave增加、平均阻力系數(shù)CDave減小、升力系數(shù)遲滯環(huán)區(qū)域面積Ahys減小;且隨著振蕩頻率的增加,等離子體對(duì)翼型動(dòng)態(tài)氣動(dòng)性能改善的幅度明顯減小,特別是f=1.25 Hz時(shí),CLave不增反而略減,Ahys不減卻略有增加,分析認(rèn)為等離子體更加難以有效控制高頻振蕩翼型的動(dòng)態(tài)失速渦和翼面分離的產(chǎn)生與發(fā)展,此時(shí)應(yīng)當(dāng)增大激勵(lì)強(qiáng)度以達(dá)到較好的控制效果。
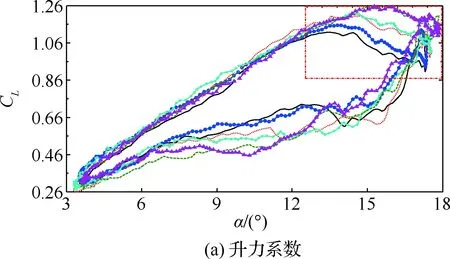
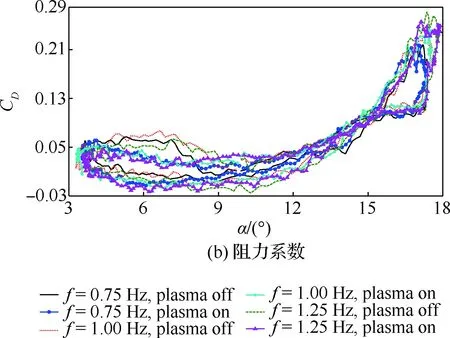
圖13 不同振蕩頻率下的等離子體控制效果 (α0=10.0°,α1=7.0°,V=10 m/s)Fig.13 Effect of plasma control at different oscillation frequencies (α0=10.0°, α1=7.0°, V=10 m/s)
表2 不同振蕩頻率下翼型氣動(dòng)特性比較Table 2 Comparison of aerodynamic characteristics of airfoil at different oscillation frequencies
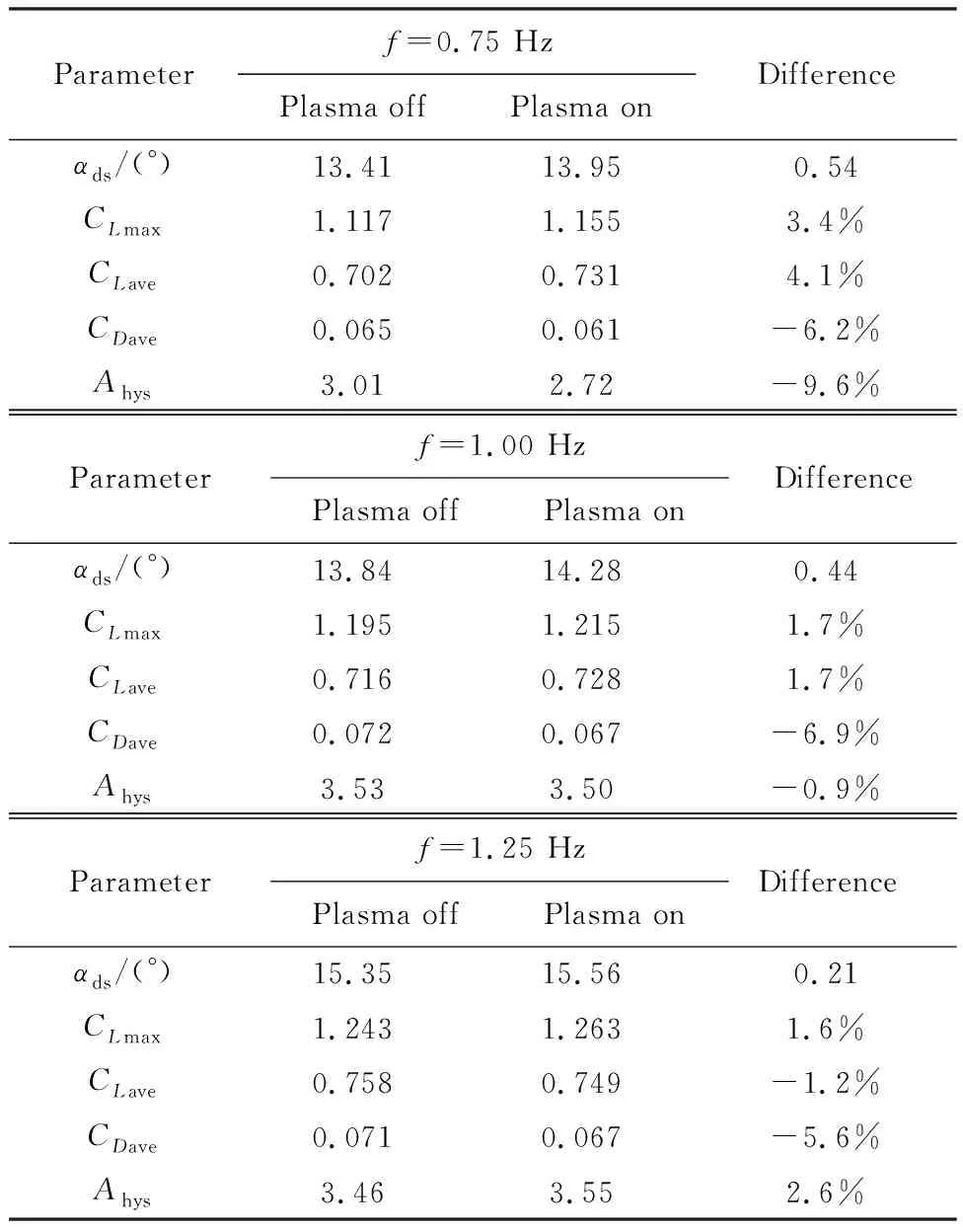
Parameterf=0.75 HzPlasma offPlasma onDifferenceαds/(°)13.4113.950.54CLmax1.1171.1553.4%CLave0.7020.7314.1%CDave0.0650.061-6.2%Ahys3.012.72-9.6%Parameterf=1.00 HzPlasma offPlasma onDifferenceαds/(°)13.8414.280.44CLmax1.1951.2151.7%CLave0.7160.7281.7%CDave0.0720.067-6.9%Ahys3.533.50-0.9%Parameterf=1.25 HzPlasma offPlasma onDifferenceαds/(°)15.3515.560.21CLmax1.2431.2631.6%CLave0.7580.749-1.2%CDave0.0710.067-5.6%Ahys3.463.552.6%
4.3 不同雷諾數(shù)下的等離子體控制
雷諾數(shù)為2.16×105、3.08×105、4.11×105三種情況下俯仰振蕩翼型氣動(dòng)系數(shù)隨迎角變化遲滯回線如圖14所示,隨著雷諾數(shù)的增加,對(duì)應(yīng)翼型俯仰振蕩減縮頻率減小,由圖可知,翼型的最大升力系數(shù)、最大阻力系數(shù)、失速迎角和遲滯回線區(qū)域均有減小趨勢(shì)。對(duì)比分析等離子體激勵(lì)控制效果不難發(fā)現(xiàn),雷諾數(shù)為2.16×105時(shí),等離子體增加翼型升力、推遲動(dòng)態(tài)失速效果最為顯著,隨著雷諾數(shù)繼續(xù)增加,等離子體控制效果變差,即完全抑制動(dòng)態(tài)失速所需要的DBD激勵(lì)強(qiáng)度增加。這和翼型靜態(tài)失速等離子體流動(dòng)控制的一般規(guī)律相一致,即高雷諾數(shù)條件下的流動(dòng)分離更難被抑制,對(duì)等離子體激勵(lì)的強(qiáng)度需求更大[28]。
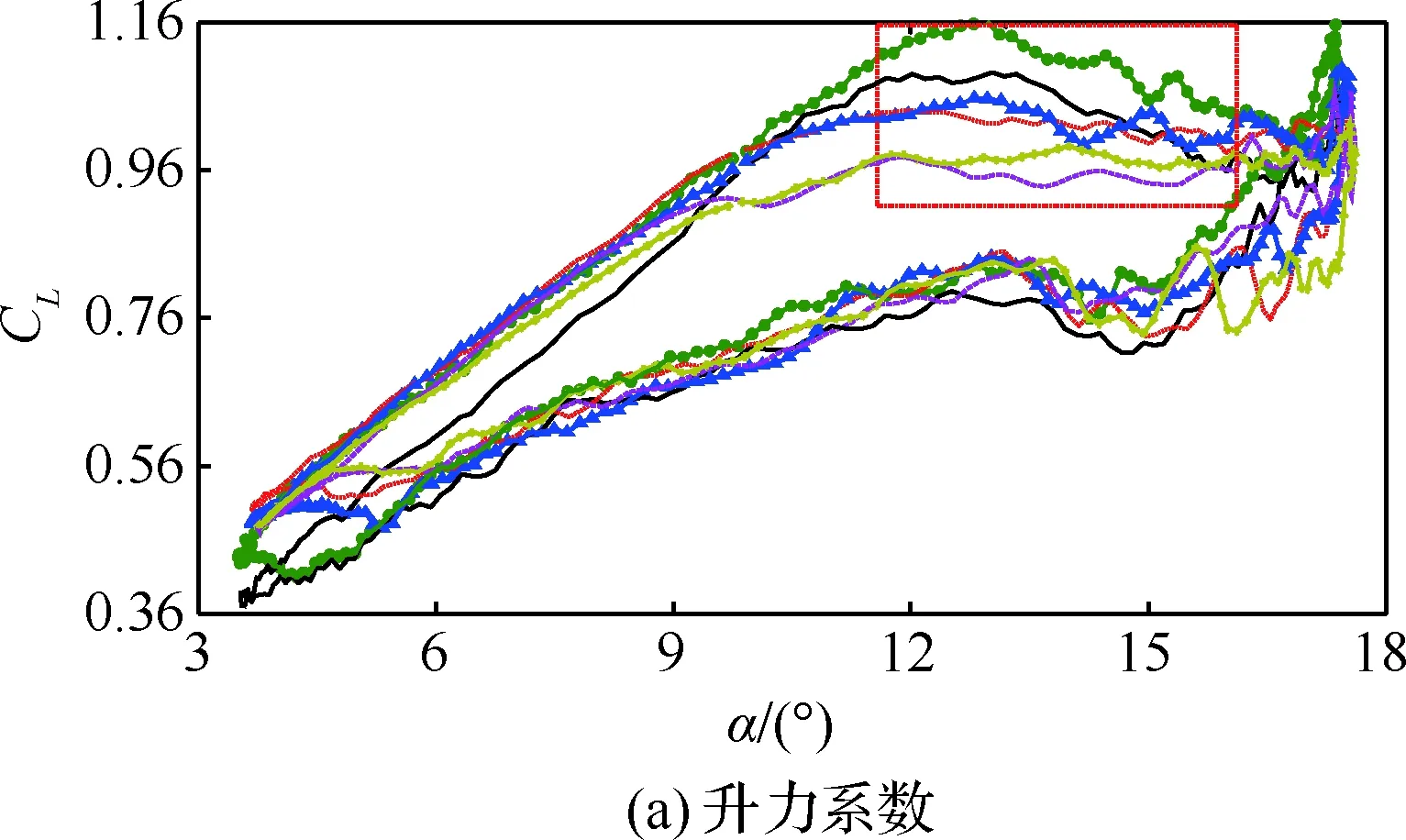
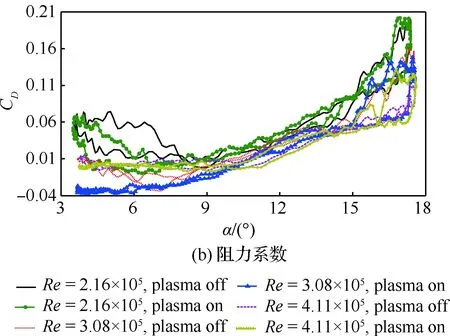
圖14 不同雷諾數(shù)下等離子體控制效果 (α0=10.0°,α1=7.0°,f=0.5 Hz)Fig.14 Effect of plasma control at different Reynolds numbers (α0=10.0°, α1=7.0°, f=0.5 Hz)
4.4 動(dòng)態(tài)流場(chǎng)特性PIV試驗(yàn)
圖15為α0=10.0°、α1=7.0°、f=0.5 Hz、V=10 m/s 下,負(fù)行程14.1°迎角時(shí),翼型吸力面
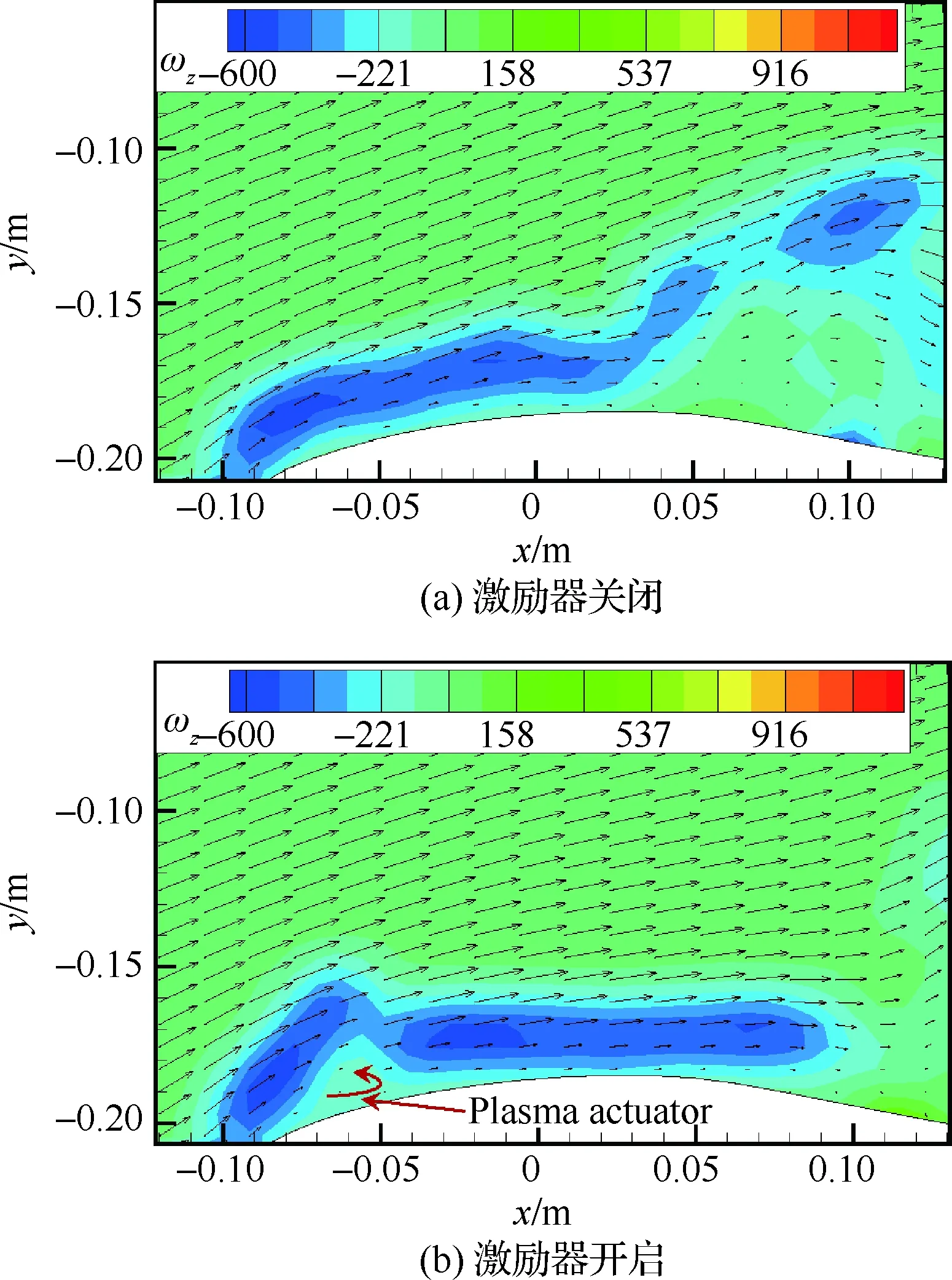
圖15 負(fù)行程14.1°迎角翼型吸力面渦量云圖和 速度矢量圖Fig.15 Vorticity contours and velocity vectors of airfoil suction surface for 14.1° angle of attack at negative stroke
不同位置的z向渦量(ωz)云圖和速度矢量分布圖。激勵(lì)器關(guān)閉狀態(tài)下,翼型運(yùn)動(dòng)至該迎角時(shí),上翼面出現(xiàn)較大范圍的流動(dòng)分離;激勵(lì)器開啟后,等離子體氣動(dòng)激勵(lì)誘導(dǎo)出翼型前緣附近的貼體翼面渦,進(jìn)而影響下游的流動(dòng),在誘導(dǎo)翼面渦[2]的作用下,上翼面的分離流重新附著于翼型表面,渦流影響區(qū)域明顯減小,流動(dòng)分離得到明顯的抑制,即等離子體氣動(dòng)激勵(lì)延遲了翼型動(dòng)態(tài)失速。
圖16為α0=10.0°、α1=7.0°、f=0.5 Hz、V=10 m/s 下,施加控制前后翼型吸力面不同位置流動(dòng)的速度(Vm)分布,可知弦向位置x=23.3%c和x=46.7%c處邊界層內(nèi)的流動(dòng)速度在等離子體氣動(dòng)激勵(lì)的影響下均有明顯的增加,且邊界層厚度變薄。分析認(rèn)為施加DBD等離子體控制后,一方面由于等離子體誘導(dǎo)的射流方向和主流方向一致,等離子體的“碰撞效應(yīng)”通過動(dòng)量交換的方式直接增加了邊界層內(nèi)中性氣流的動(dòng)量[30],增強(qiáng)了氣流克服逆壓梯度繼續(xù)向下游流動(dòng)的能力,進(jìn)而減小了邊界層厚度;另一方面等離子體在氣流中增加了擾動(dòng),促進(jìn)高低速氣流的摻混,邊界層外部主流區(qū)的高速氣流進(jìn)入到邊界層內(nèi),向邊界層注入了能量,從而達(dá)到了推遲邊界層流動(dòng)分離和減小渦流強(qiáng)度的控制效果。
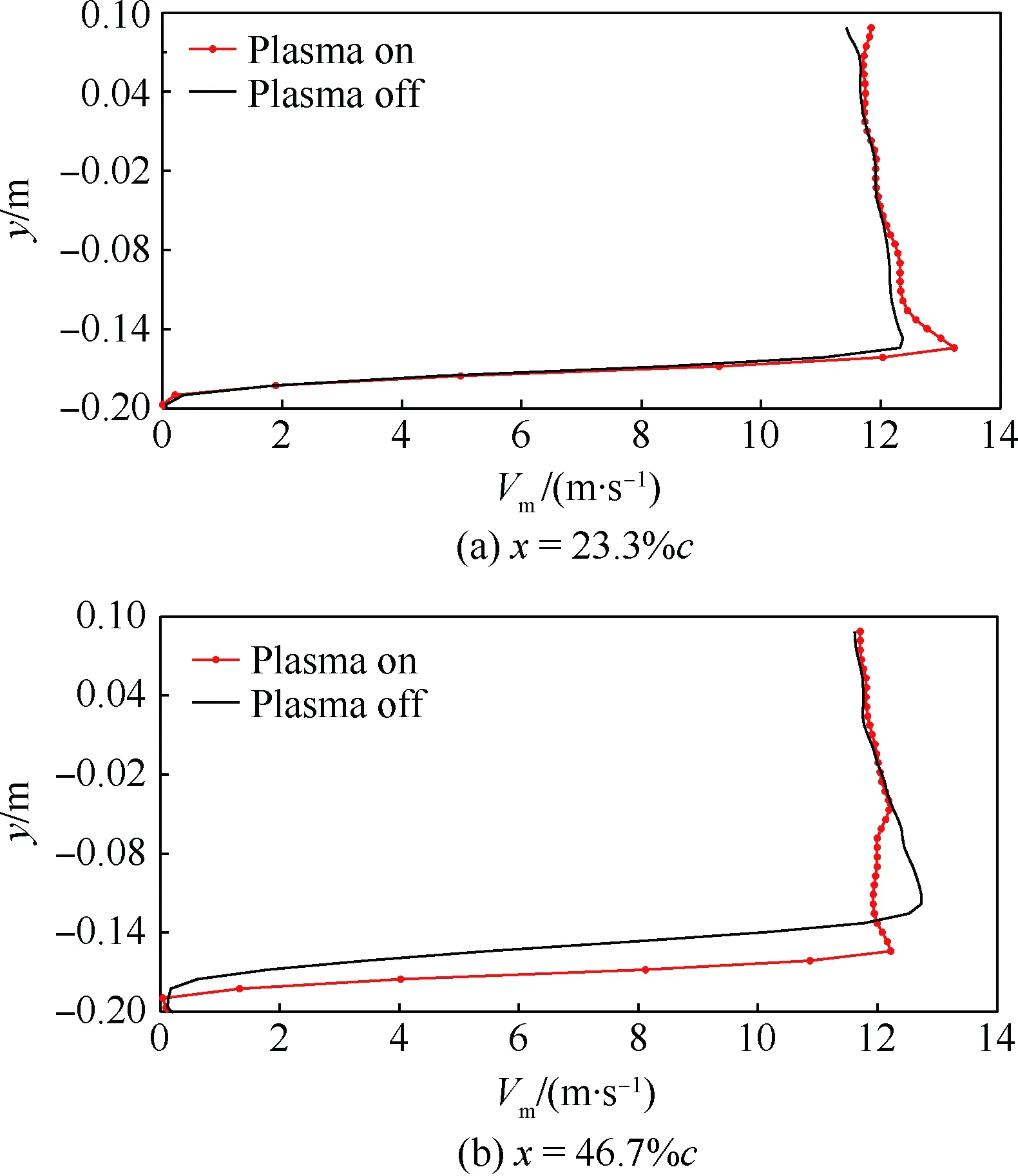
圖16 負(fù)行程14.1°迎角時(shí)施加等離子體控制前后翼型 吸力面不同位置速度分布Fig.16 Velocity distribution of different positions on airfoil suction surface for 14.1° angle of attack at negative stroke with and without plasma
圖17為α0=10.0°、α1=7.0°、f=0.5 Hz、V=10 m/s 下,迎角為16.5°時(shí),正行程和負(fù)行程兩種不同運(yùn)動(dòng)方向下翼型周圍的渦量云圖和速度流線圖,在激勵(lì)器關(guān)閉狀態(tài)下,俯仰運(yùn)動(dòng)正行程相對(duì)于負(fù)行程時(shí)翼型的流動(dòng)分離明顯延遲,文獻(xiàn)[2]認(rèn)為大迎角下流動(dòng)分離的延遲是由于前緣渦的作用。激勵(lì)器開啟后,負(fù)行程時(shí)翼型的流動(dòng)分離得到明顯的抑制,動(dòng)態(tài)失速渦的尺度明顯減小;正行程時(shí)翼型的后緣分離也得到一定程度的控制,但是并沒有完全抑制,分析認(rèn)為這是正行程下翼型俯仰運(yùn)動(dòng)前緣渦和等離子體氣動(dòng)激勵(lì)誘導(dǎo)出的翼面渦“摻混”及射流“加速”效應(yīng)的綜合作用結(jié)果。這也從流態(tài)角度解釋了圖11(a)的規(guī)律,即正行程和負(fù)行程16.5°迎角下,等離子體抑制了動(dòng)態(tài)分離渦,從而增加了上翼面區(qū)域的吸力。
圖18給出了不同振蕩頻率下翼型表面流場(chǎng)分布。激勵(lì)器關(guān)閉狀態(tài)下,振蕩頻率由0.75 Hz增加至1.25 Hz時(shí),翼型動(dòng)態(tài)失速渦的尺度和強(qiáng)度都有減小趨勢(shì),即動(dòng)態(tài)失速“延遲”程度加劇。f=0.75 Hz時(shí),激勵(lì)器開啟后翼型表面流動(dòng)分離得到明顯的抑制,渦量強(qiáng)度明顯減小;f=1.25 Hz時(shí),激勵(lì)器開啟后翼型表面動(dòng)態(tài)流動(dòng)分離狀況并沒有得到很好的改善,這也從流態(tài)的角度解釋了4.2節(jié)的現(xiàn)象,即振蕩頻率增加,翼型繞流的非定常性增強(qiáng),等離子體氣動(dòng)激勵(lì)更加難以抑制動(dòng)態(tài)失速渦的產(chǎn)生和發(fā)展。
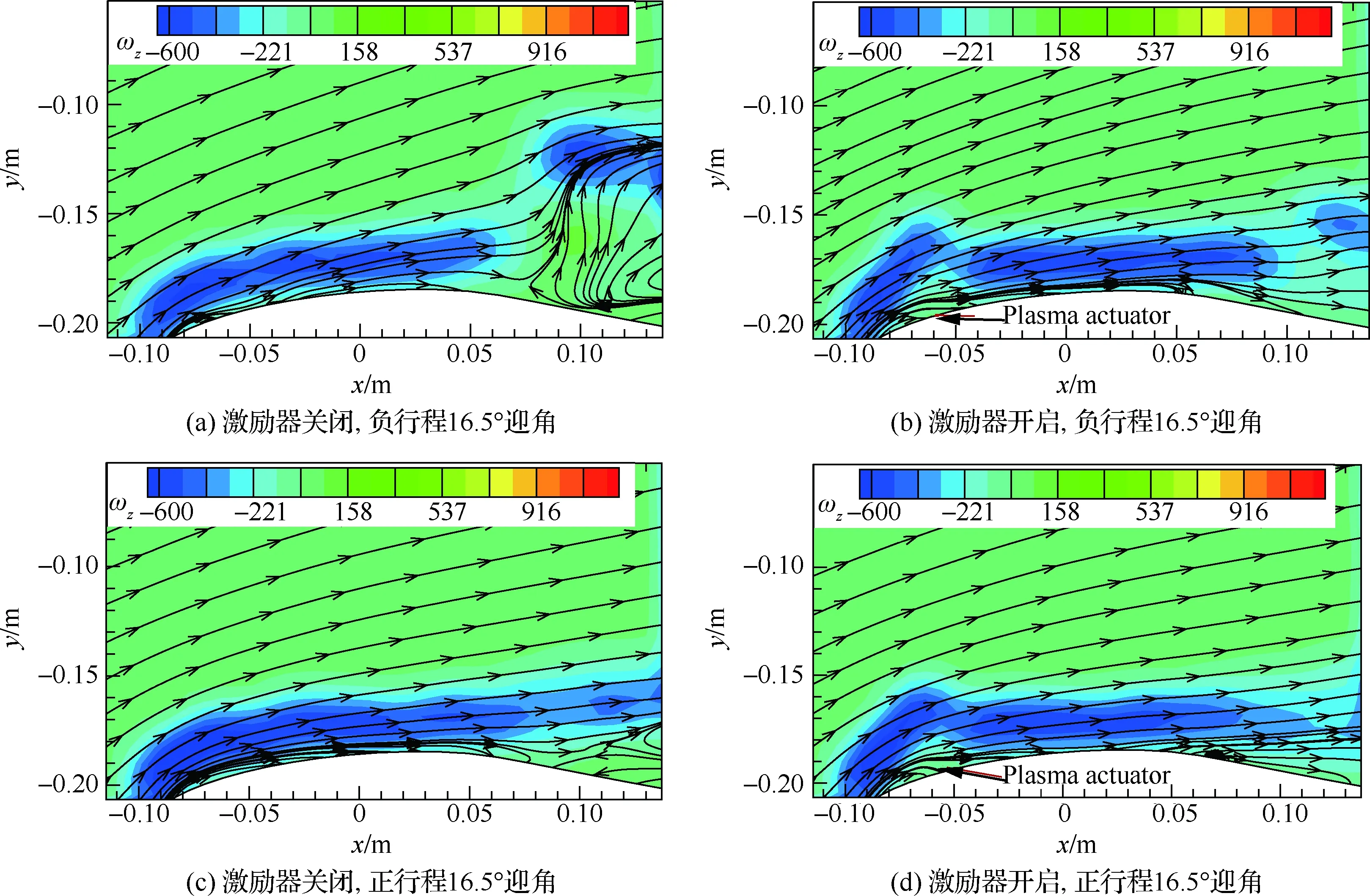
圖17 不同運(yùn)動(dòng)方向下翼型表面渦量云圖和速度流線圖Fig.17 Vorticity contours and velocity streamlines of airfoil surface under different motion directions
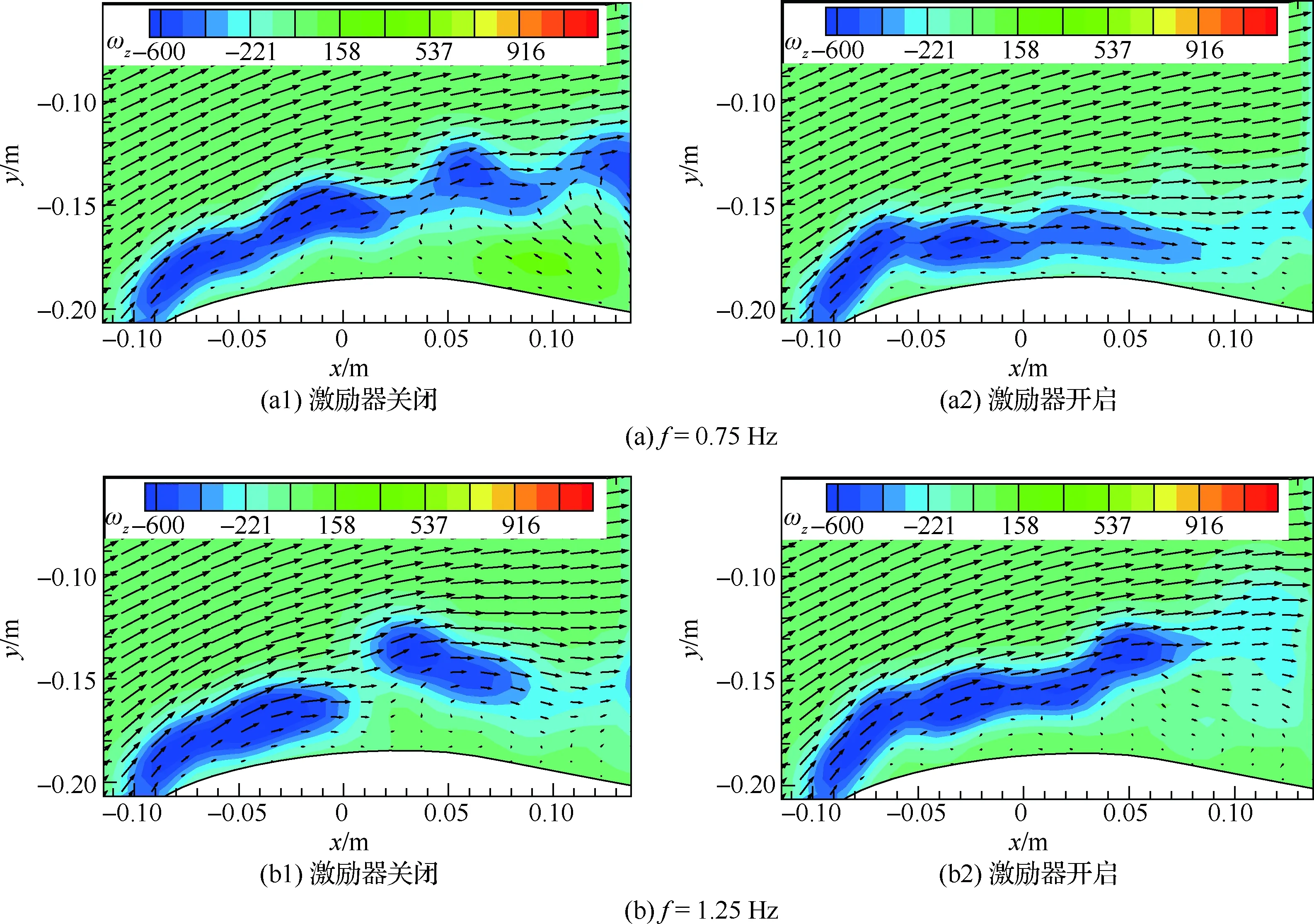
圖18 不同振蕩頻率下翼型表面渦量云圖和速度矢量圖(α0=10.0°,α1=7.0°,正行程16.9°迎角)Fig.18 Vorticity contours and velocity vectors of airfoil surface at different oscillation frequencies (α0=10.0°, α1=7.0°, 16.9° angle of attack at positive stroke)
5 結(jié) 論
針對(duì)動(dòng)態(tài)失速引起的翼型氣動(dòng)性能惡化的問題,利用小型化激勵(lì)電源和DBD激勵(lì)器,借助動(dòng)態(tài)壓力測(cè)量和外觸發(fā)式PIV等手段開展翼型動(dòng)態(tài)失速等離子體流動(dòng)控制試驗(yàn)研究,試驗(yàn)數(shù)據(jù)的可靠性較好。研究表明,DBD等離子體氣動(dòng)激勵(lì)能夠有效控制翼型動(dòng)態(tài)失速,改善平均氣動(dòng)力,提高翼型氣動(dòng)效率,減小氣動(dòng)力隨迎角變化的遲滯區(qū)域。
1) 開啟上翼面距離前緣8.3%弦長(zhǎng)位置的等離子體激勵(lì)器,可增加上翼面x/c=0.2~0.4區(qū)域的吸力,產(chǎn)生的低壓區(qū)將動(dòng)態(tài)分離流動(dòng)重新吸附回翼面上來(lái),減弱了動(dòng)態(tài)分離渦的強(qiáng)度,升力系數(shù)功率譜密度分布的二、三、四階能量明顯減弱。
2) 在典型工況下,等離子體氣動(dòng)激勵(lì)實(shí)現(xiàn)了翼型平均升力系數(shù)增加7.1%、失速迎角推遲1.3° 和遲滯區(qū)域減小4.5%的明顯控制效果;且在4°~9°迎角段,等離子體的減阻增效效果更好,平均阻力系數(shù)減小40%以上。
3) 振蕩頻率增加導(dǎo)致翼型繞流的非定常效應(yīng)增強(qiáng),高雷諾數(shù)下翼型動(dòng)態(tài)分離渦更加難以被抑制,這兩種情況下均需要增加等離子體激勵(lì)強(qiáng)度才能達(dá)到較好的控制效果。
4) 激勵(lì)器開啟后,等離子體氣動(dòng)激勵(lì)誘導(dǎo)出翼型前緣附近的貼體翼面渦,進(jìn)而影響下游的流動(dòng),在誘導(dǎo)翼面渦的作用下,上翼面的分離流重新附著于翼型表面。