基于一階PPF的垂尾振動分數階控制
2018-08-29 05:39:10牛文超李斌高振宇王巍
航空學報 2018年8期
牛文超,李斌,高振宇,王巍
西北工業大學 航空學院,西安 710072
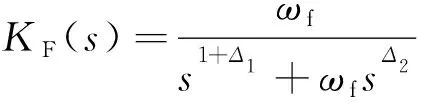
現代高性能戰機在進行高機動大迎角飛行時,飛機垂尾時常受到不穩定分離渦或者發動機等外激勵的影響,垂尾結構會出現嚴重的振動疲勞問題。為此,從20世紀90年代,美國NASA等機構已對垂尾的振動抑制問題進行研究,文獻[1]總結了20世紀90年代垂尾振動抑制的被動與主動控制形式,并指出基于壓電材料抑制垂尾振動的發展方向。隨后,Nitzsche等對比了加速度響應與動態應變響應作為反饋信號的垂尾抖振抑制性能,指出動態應變信號為反饋信號的性能更優[2]。Sheta等通過數值計算分析了采用壓電片控制全尺寸F/A-18垂尾在最大抖振狀態下的響應[3],并采用2個單輸入單輸出控制器同時控制垂尾前2階模態,但對一扭模態的控制效果不佳[4]。Browning等通過地面試驗和飛行試驗研究了F-16飛機腹鰭的壓電抖振控制問題,驗證了正位置反饋(PPF)和線性二次型高斯(LQG)控制對于抖振抑制的有效性[5]。針對不同飛行狀態(迎角、風速)下控制系統的魯棒性,Chen等分別采用H∞[6]和μ[7]綜合控制對垂尾的抖振控制進行研究。國內,陳仁文等采用壓電作動器設計了垂尾減振系統[8],王巍等根據主模態控制思想設計了垂尾抖振主動控制系統[9]。冷勁松等驗證了宏纖維壓電復合材料(MFC)作動器對于垂尾抑制的有效性[10],楊智春等采用壓電載荷等效方法對MFC壓電作動器建模,提出一種基于輸出可控性的壓電作動器優化準則,以提高壓電作動器在垂尾抖振抑制的性能[11]。綜合上述文獻可以看出,對于構建的飛機垂尾振動主動控制系統:一是要具有良好的魯棒性,能夠適應附加氣動阻尼或氣動剛度效應帶來的結構動力學特性的時變性;另一方面要求控制系統在傳感和驅動方面簡潔實用,易于實現。PPF控制器是一種典型的針對目標模態實施主動控制的方法[12],結構簡潔,易于實現,因此已廣泛用于基于壓電驅動的航空航天等柔性結構的振動抑制中[13-14]。PPF控制器的基本原理是在傳感/驅動共位配置的基礎上,在反饋回路中增加一個相位補償環節,使得驅動器實時輸出一個與原始振動反向的響應以抵消原結構的不利振動[13]。經典PPF控制器按補償器微分方程的階次可分為一階PPF與二階PPF形式。二階PPF控制器對于目標模態頻率過于敏感,當系統發生模態頻率偏移時,易出現控制溢出問題。針對上述問題,Rew等基于頻率在線估計方法,提出一種用于攝動系統的自適應PPF控制器,提高了PPF控制器的魯棒性[15],但在有些工況下頻率在線估計的波動性和誤差較大,嚴重影響了控制器的性能。Baz等結合獨立模態空間方法,將PPF控制器簡化為一階補償器的形式[16-18],改善了控制器在高于目標模態頻率頻段內的相位補償效果,使得控制器對高階模態的振動響應具有良好的抑制性能[16]。不過經典的一階PPF控制器依然對結構固有頻率的變化較為敏感,尤其當結構的目標模態頻率向低頻方向攝動時,控制器魯棒性較差。
高性能戰機的垂尾發生抖振時,受附加氣動剛度等因素的影響,其主振動成分的頻率具有典型的時變特性,傳統的振動主動控制器往往不能滿足實際要求。新興的分數階控制器具有可調參數多、控制器設計靈活、魯棒性強等特點[19],可以改變傳統整數階控制器在整個目標頻段內的頻域特性,為問題的解決提供了新的方向。本文針對飛機垂尾振動主動控制的需要,基于分數階微積分理論與一階PPF控制器構造分數階(FOPPF1) 控制器。該控制器相比二階PPF控制器僅增加了一個設計參數,但控制器設計的靈活性明顯提高。該控制器通過調節一階PPF控制器的頻域特性,改善控制器對于攝動系統的振動抑制性能。綜合考慮隨機響應的頻域特性與整體波動強弱,給出了該控制器參數的優化調節方法。并以一個粘有MFC壓電片的垂尾試驗模型為例,利用粒子群算法設計出相應的FOPPF1控制器,并通過仿真與試驗分析驗證該控制器的優異性能。
1 一階PPF控制器
傳統一階PPF控制系統的原理框圖如圖1所示,其中G1(s)為外激勵Fp與傳感器響應d的傳遞函數,G2(s)為控制電壓u與傳感器響應y的傳遞函數,在反饋回路中添加一個一階補償器K(s),即一階PPF控制器的傳遞函數,y為作動器引起的振動響應信號,與結構無控時的響應d疊加相消后達到振動抑制的效果,e為結構參考點測得的殘差振動響應。一階PPF控制器與PPF控制器的原理基本相同,通過引入一個高阻尼的補償器提高控制系統的阻尼,達到振動抑制的目的。
根據文獻[20],對于任意一個多自由度系統,設被控目標模態的運動方程與對應的一階PPF控制器分別為
(1)
(2)

(3)
為保證控制器對結構目標模態具有良好的控制效果,需令ωf=ωc。
一階PPF控制器的不足之處表現在:ωf一旦設定,當被控結構由于參數攝動,出現目標模態的響應頻率偏移時,控制系統易不穩定,作動器輸出的響應y與原結構開環響應d之間的相位差可能不在90°~270°之間,引起控制反效;若將ωf設為遠小于結構的固有頻率,雖然可以滿足相位補償的需要,但是控制器傳遞函數在目標頻段的幅頻特性又被破壞,導致控制輸出過小,不能滿足實際要求,且帶來低頻段的溢出問題。
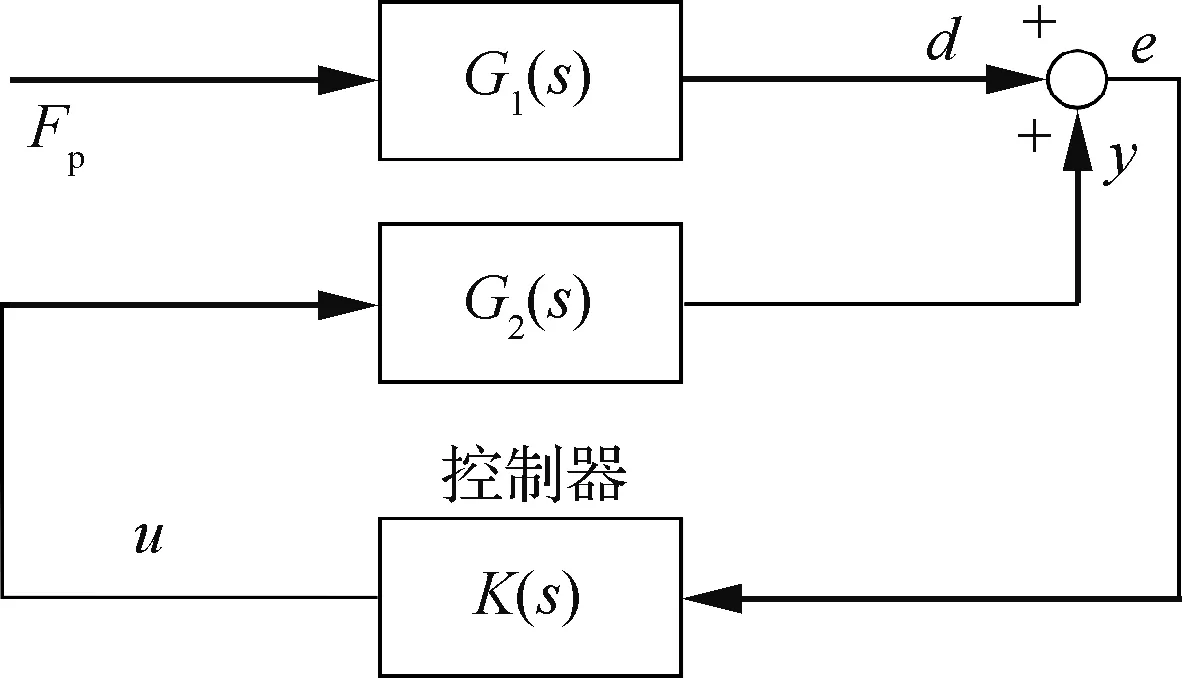
圖1 一階PPF控制系統的結構框圖Fig.1 Block diagram of the first-order PPF control system
2 基于一階PPF的分數階控制器
若能利用分數階來改善傳統一階PPF控制器的幅頻與相頻特性,既保證控制器在目標頻段內的相頻曲線盡量水平,又能維持良好的幅值傳遞特性,則可以降低控制器對結構固有頻率時變的敏感性,提高傳統一階PPF控制器的魯棒性。
目前常見的分數階微積分的定義形式有:Grünwald-Letnikov (GL)定義、Riemann-Liouville (RL)定義與Caputo定義。Caputo定義更適合分數階微積分初值問題的求解,并且其Laplace變換形式更為簡潔[21],因此本文采用Caputo的定義形式。
基于一階PPF構造FOPPF1控制器的基本思路為:在傳統一階PPF控制器微分方程的基礎上,將整數階微積分擴展為在一定范圍內變化的分數階微積分,新增2個可調參數Δ1和Δ2,提高一階PPF控制器的設計空間,改善控制器性能。
FOPPF1控制器的動力學方程為
(4)

(5)
其中:t0和t為運算上下限;α為階次;Re(α)為α的實部。則FOPPF1控制器的Laplace變換形式為
(6)
由式(6)可知,傳統一階PPF控制器只是FOPPF1控制器的一種特殊形式,FOPPF1控制器包含無數個設計點,而一階PPF控制器只有一個設計點(1, 0)。
為使2個分數階參數在仿真中相互獨立,方便控制器設計,將式(6)變換為
(7)
令a=-Δ1,b=Δ2-Δ1,則式(7)可寫為
(8)
根據經驗,該傳遞函數化簡后,各項冪指數的最大調節范圍為[-0.6,0.6]。式(8)對應的FOPPF1控制器的仿真框圖如圖2所示。其中In(t)與Out(t)分別為控制器的輸入與輸出,ωf=ωc。
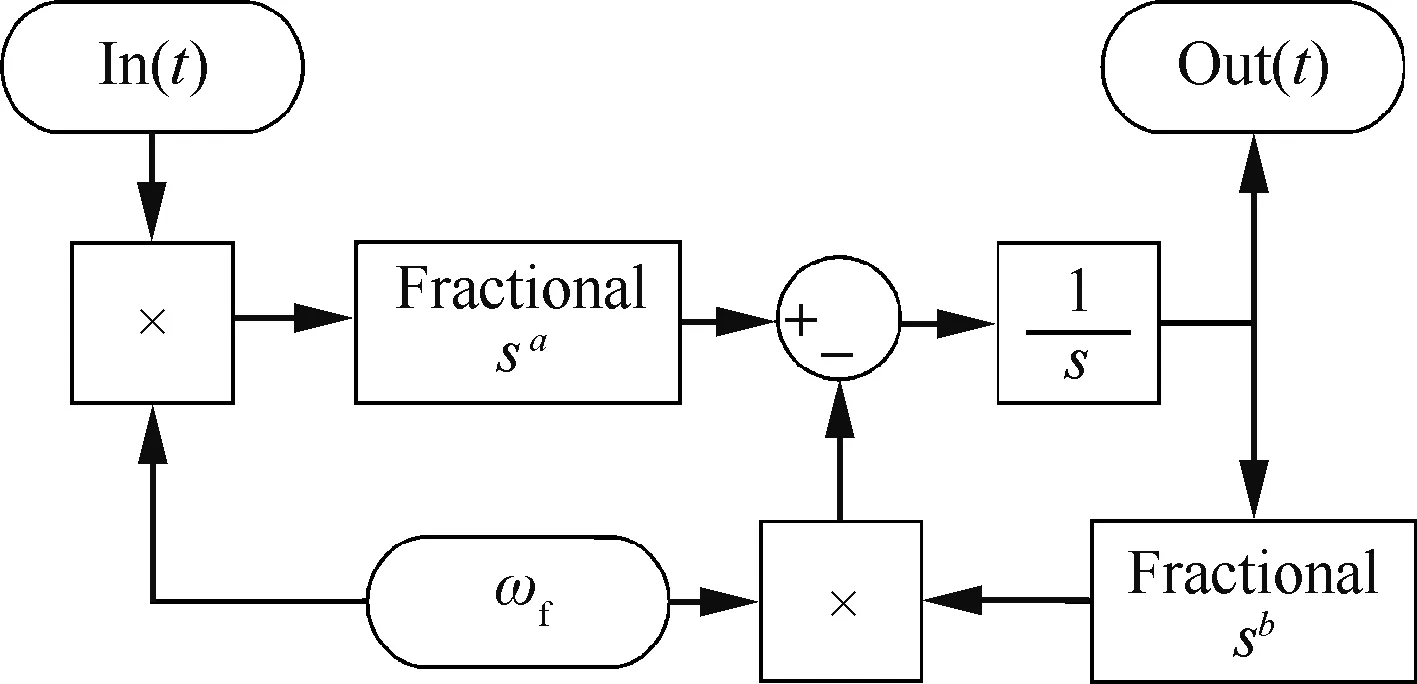
圖2 FOPPF1控制器框圖Fig.2 Block diagram of FOPPF1 controller
3 FOPPF1控制器的優化設計
考慮到垂尾結構振動一般具有窄帶隨機的特性,因此本文采用隨機激勵為設計輸入。控制器的設計目標是尋找一組最優的控制器參數能夠將被控結構的主振動成分及總體振動幅值抑制到最低水平。
對于任意一組給定的控制器參數,假設已獲得系統精確的結構動力學標稱模型。根據被控結構的實際工作情況,定義一段典型的時域隨機激勵作為系統的輸入,采用如圖3所示的MATLAB仿真框架,則可以計算得到開環系統與閉環系統的時域隨機響應yo與yc,并同時計算yo與yc對應的功率譜密度(PSD)與均方根值(RMS)。
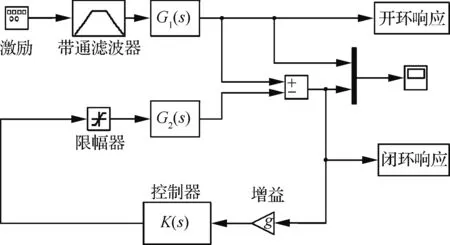
圖3 MATLAB仿真框圖Fig.3 Block diagram of MATLAB simulation
定義閉環系統隨機響應PSD譜峰值的降低比為
(9)
式中:Po為開環系統隨機響應PSD譜的峰值;Pc為閉環系統隨機響應PSD譜的峰值。
定義閉環系統隨機響應RMS值的降低比為
(10)
式中:Ro為開環系統隨機響應的RMS值;Rc為閉環系統隨機響應的RMS值。
設FOPPF1控制器的設計變量為x=(a,b),控制器參數的優化目標為被控結構在給定激勵作用下閉環系統的PSD譜峰值降低比和RMS值降低比的加權和最大,則目標函數h可定義為
(11)
相比其他傳統優化算法,粒子群算法具有原理簡單、收斂速度快等特點,已廣泛用于分數階控制器設計,并得到了理想的優化結果[16],因此本文采用粒子群算法進行式(11)所描述的優化問題的求解。
4 垂尾模型的FOPPF1控制器設計
4.1 試驗模型
本文以如圖4所示的根部固支垂尾模型為對象進行研究,該垂尾為真實垂尾1∶2的縮比模型,其質量約為17.3 kg,具體尺寸如圖4所示。被控目標模態選為垂尾一階彎曲模態,其標稱狀態下的固有頻率為13.5 Hz,模態阻尼比為0.012 2,激勵力的涵蓋頻段為[5, 20] Hz。在垂尾根部的兩側面各對稱貼6片MFC壓電片,施加主動控制力,課題組前期采用拓撲優化選取MFC驅動效率最高的區域,并采用文獻[11]中方法確定壓電片的布局。MFC壓電片通過高壓功率放大器(HVA 1500/50-4, Smart Material Corp.)驅動。在地面振動控制試驗中,采用電磁激振器(JZK-10, Sinocera)在垂尾根部施加激勵以模擬垂尾受到的氣動載荷。使用半實物實時仿真系統Quanser進行振動主動控制試驗。以垂尾根部應變響應為反饋信號,應變信號通過動態應變儀(DH3840, 東華)進行采集,數據分析采用Vibrunner (m+p International)。
為了檢驗本文所設計的控制器對結構固有頻率發生攝動時的適應性,本文設計了2種垂尾攝動試驗模型的構建方案。在地面振動控制試驗中,增加垂尾結構固有頻率的試驗系統往往過于復雜,為簡化試驗方案,本文均采用在垂尾端部附加質量的方式減小結構的固有頻率,2種方案為:① 固定質量塊方案,通過調整固定質量塊的數量,階梯式改變垂尾結構的質量,以模擬垂尾固有頻率在飛行中的突然攝動問題;② 沙斗配置方案,在振動過程中實時往沙斗中增加鐵砂實現垂尾模型質量的緩變調節,從而模擬垂尾固有頻率在飛行中的緩變攝動問題。2種攝動試驗模型的配置如圖5所示。
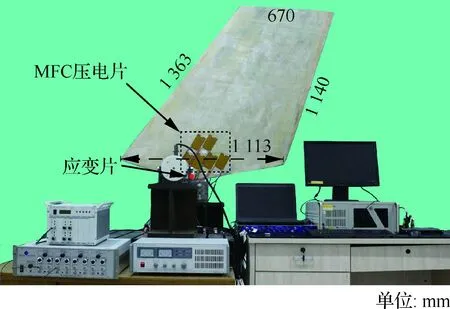
圖4 試驗模型與試驗系統Fig.4 Experimental model and system
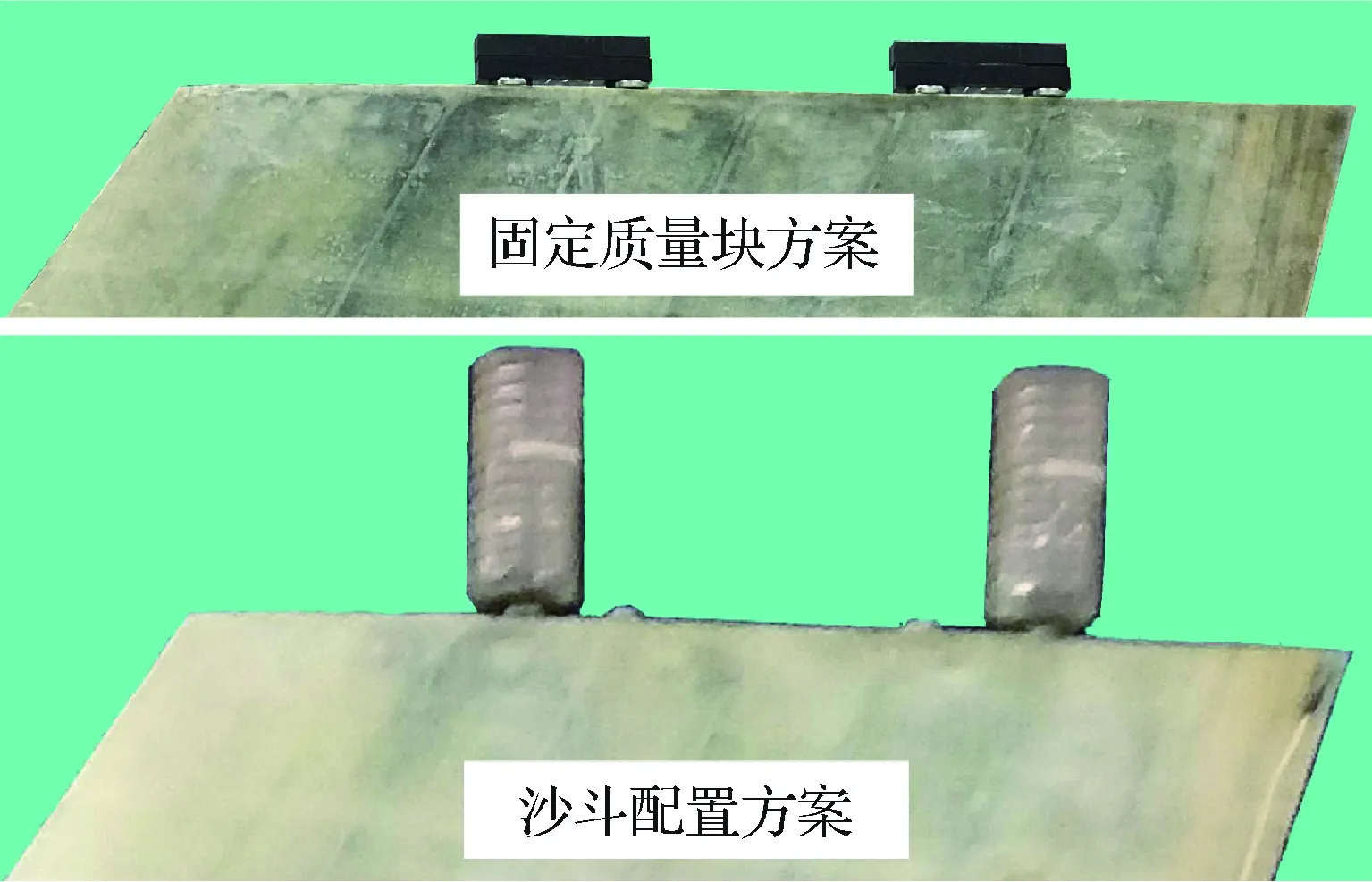
圖5 攝動模型構建方案Fig.5 Construction scheme of perturbation model
4.2 系統辨識與控制器參數設計
首先對處于標稱狀態的垂尾模型進行系統辨識,獲得標稱垂尾結構的動力學模型,用于控制器設計與仿真分析。辨識模型的輸入為高壓功率放大器的輸入電壓,設定為幅值2 V的2~22 Hz正弦掃頻信號,掃頻時間為30 s,采樣頻率為1 024 Hz。辨識模型的輸出為垂尾根部應變響應。利用MATLAB系統辨識工具箱可辨識建立垂尾的標稱動力學模型,并得到其傳遞函數,記為G0(s)。試驗模型與辨識模型的Bode圖如圖6所示,二者頻域特性基本貼合,辨識模型的精度可滿足實際要求。
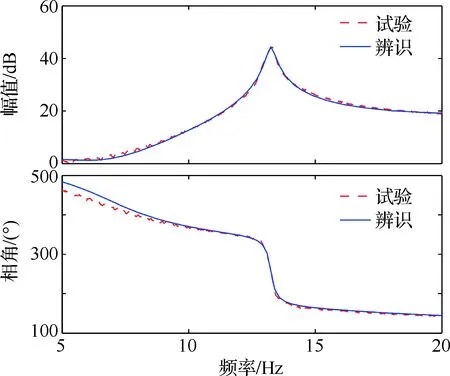
圖6 試驗模型與辨識模型的Bode圖Fig.6 Bode diagrams of experiment model and identification model
通過激勵源輸入一個帶寬為[5, 20] Hz的隨機激勵,激勵信號PSD譜峰值為0.001,仿真時間為20 s,時間步長為0.001 s,分數階微積分算子采用改進Oustaloup方法進行逼近計算。采用第3節的目標函數與仿真框圖,通過粒子群算法進行優化,得到FOPPF1控制器的最優參數為:a=0.291 2,b=-0.524 9。
4.3 FOPPF1控制器的頻域特性
為了分析4.2節基于垂尾標稱狀態所設計的FOPPF1控制器對攝動模型的適用性。本文通過辨識方法同理建立如圖5所示的固定質量塊攝動方案的動力學模型,其中單個質量塊的質量為0.96 kg,共2個質量塊,固有頻率的攝動量為-22.2%。應用數值分析方法對比分析FOPPF1控制器與經典一階PPF控制器對標稱模型和攝動模型的控制性能差異。
圖7給出了相同增益下2種控制器在目標頻段的Bode圖,從相頻圖中可以看出,在目標頻段[5, 20] Hz內,FOPPF1與一階PPF控制器的最大相角變化量分別為17.8°和35.6°,FOPPF1控制器相頻曲線的變化量相比一階PPF減小了50%,且在10~20 Hz頻段的相角幾乎保持恒定。相角變化小,意味著控制器在目標頻段內可以提供相對穩定的相位補償,只要被控結構固有頻率的攝動量不超過其相位穩定補償區,控制器將不會發生控制效率顯著下降或控制溢出。從幅頻圖中可以看出,FOPPF1的幅值明顯高于一階PPF控制器,因此相同增益下,分數階控制器的輸出也會更大。以上分析表明,FOPPF1控制器的魯棒性和控制效果相較一階PPF均有顯著增強。
為驗證FOPPF1控制器對于攝動系統的魯棒性,圖8分析了FOPPF1與一階PPF控制器在被控結構模型給予一定攝動時,閉環控制系統的極點分布變化,采用本節辨識的固有頻率攝動量為-22.2%的攝動模型,控制器的增益與后文試驗相同,分別為0.016和0.09。為了更清楚觀察閉環系統的極點隨攝動量的變化,圖中沒有畫出那些遠離虛軸的具有穩定特性的極點。從極點分布圖中可以看出,當被控結構模型引入當前的固有頻率攝動量后,FOPPF1控制系統靠近虛軸的極點位置基本不變且都繼續位于虛軸的左半平面,因此控制系統繼續維持穩定狀態;而當被控結構模型引入相同的固有頻率攝動量后,傳統一階PPF控制系統靠近虛軸的極點位置發生了顯著改變,原本在標稱狀態下位于虛軸左半平面的極點移動到了虛軸的右半平面,說明攝動模型下一階PPF控制系統已經發散。閉環系統的極點變化再一次表明,本文提出的FOPPF1控制器對于結構固有頻率的攝動不敏感,其魯棒性明顯高于一階PPF控制器。
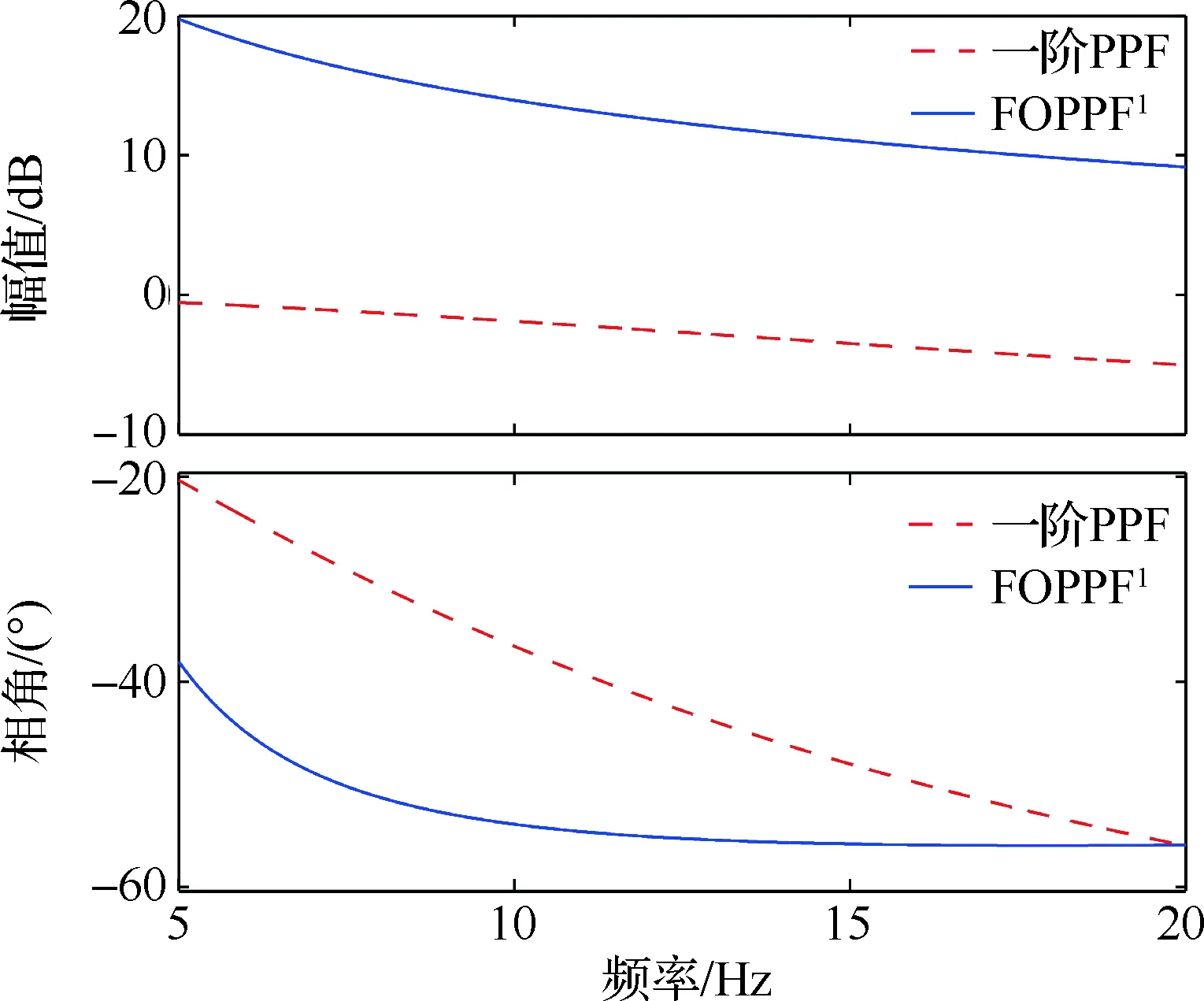
圖7 2種控制器的Bode圖Fig.7 Bode diagrams of two controllers
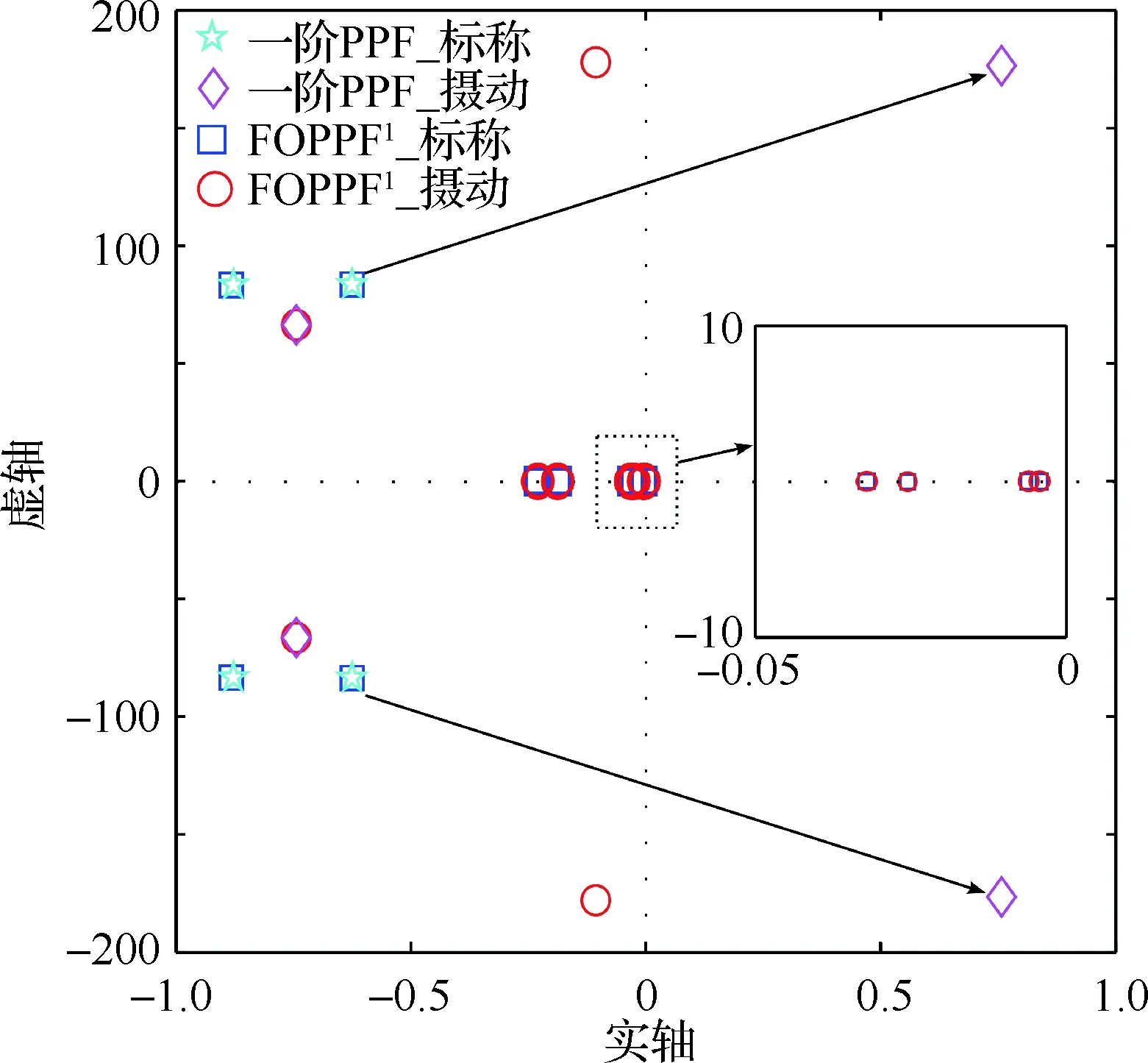
圖8 控制系統的極點分布Fig.8 Pole distribution of control systems
5 試驗驗證與討論
本節將通過垂尾的振動主動控制試驗,驗證FOPPF1控制器的有效性,并與一階PPF控制器進行對比,控制器參數與4.2節相同,振動主動控制試驗系統如圖4所示。由于被控目標模態是垂尾一階彎曲模態,因此在反饋回路增加了一個[5,20] Hz的4階帶通濾波器,濾除結構響應中的高階成分。驗證試驗包括:自由振動響應控制試驗和隨機響應控制試驗2種形式。
5.1 自由振動響應控制試驗
自由振動響應控制試驗的目的為觀測主動控制器帶來的等效阻尼效應。以處于標稱狀態的垂尾結構為試驗對象,在垂尾根部施加與標稱垂尾結構一階彎曲固有頻率13.5 Hz一致的定頻正弦激勵力,使得垂尾處于穩態振動狀態。然后瞬間關閉激振器,并同時開啟主動控制器,測得結構的自由振動響應,如圖9所示,并采用對數減幅率方法計算結構的等效阻尼比,試驗結果如表1所示。從圖表中可以看出,FOPPF1控制器的衰減持續時間最短,該控制器可實現的等效阻尼比相比一階PPF控制器增加了50.1%。
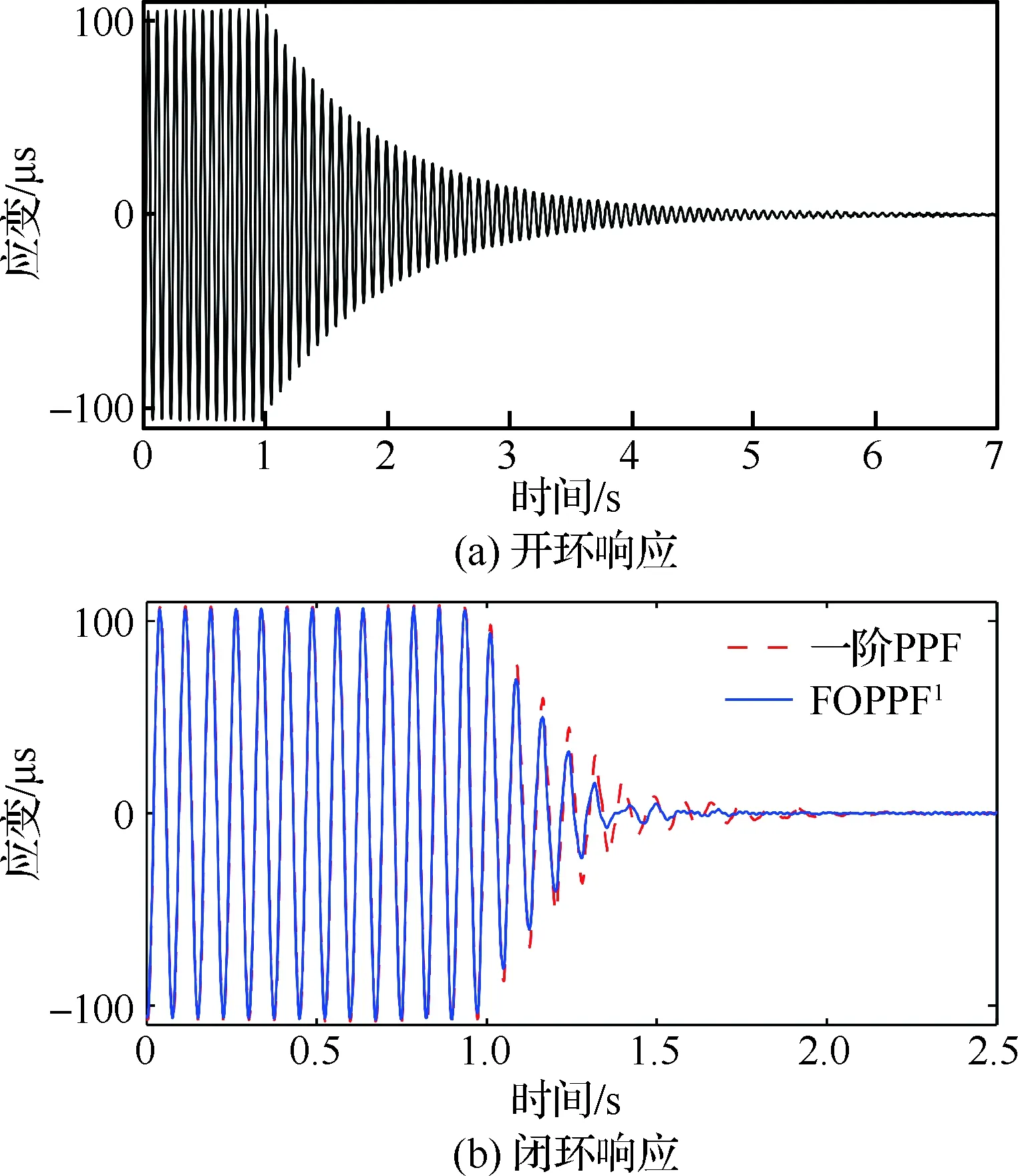
圖9 自由振動響應Fig.9 Free vibration response
表1 結構阻尼率與穩定時間Table 1 Structural damping ratio and settling time

參數阻尼率穩定時間/s開環狀態0.012 25.61FOPPF10.070 70.67一階PPF0.047 11.08
5.2 隨機響應控制試驗
為了驗證典型的窄帶隨機激勵下,主動控制器對于標稱模型與攝動模型的控制效果與魯棒性,本節分別以處于標稱狀態與攝動狀態的垂尾結構為試驗對象,在垂尾根部施加頻帶為[5, 20] Hz的隨機激勵,測試2種控制器對于隨機振動的抑制性能。
5.2.1 階梯攝動結構的隨機響應控制試驗
試驗對象為采用固定質量塊調節方案的階梯攝動試驗模型,所加單個質量塊的質量為0.4 kg,共增加2個質量塊,垂尾模型攝動后的固有頻率為12.0 Hz,固有頻率的攝動量Δωc為-11.1%。所謂階梯攝動方案為:開始試驗前,質量塊已經調整到位,屬于一種離線攝動形式。為保護壓電片和高壓功率放大器的安全,文本選取外激勵載荷的原則為:在試驗過程中,MFC的最大輸入電壓小于200 V。若試驗中壓電片的最大輸入電壓小于限壓保護器閥值,則控制器的控制效果基本不受外激勵大小的影響。
圖10給出了標稱試驗模型和階梯攝動試驗模型分別采取開環、一階PPF和FOPPF1控制時,垂尾根部應變響應的PSD譜。表2給出了相應的PSD譜峰值降低量(與開環情況對比)和RMS值降幅比(與開環情況對比)及控制器輸出電壓的RMS值(表征控制能耗)。

圖10 隨機響應的PSD譜Fig.10 PSD spectra of random response
對標稱垂尾模型(Δωc=0%),由測試結果的對比分析可知,FOPPF1和一階PPF控制器在結構共振峰區域均獲得較好的控制效果,達到抑制主模態振動成分的目標,且相比而言,FOPPF1比一階PPF的控制效果更優。對標稱垂尾模型,施加主動控制后,結構響應的RMS值與無控狀態相比均降低了約60%,兩者控制效果相當,FOPPF1僅比一階PPF多降低了1.5%。但FOPPF1控制系統可達到的PSD譜峰值衰減量較一階PPF控制系統提高了3.8 dB。若用“結構響應RMS值每降低1%所需控制電壓的RMS值”來度量控制能耗率,則可發現,FOPPF1控制系統響應的RMS值每降低1%所需電壓的RMS值為0.824 V,而一階PPF控制器為0.904 V,該FOPPF1控制器所需能量的能耗率比一階PPF控制器低約9%。
對階梯攝動垂尾模型(Δωc=-11.1%),一階PPF控制器的控制效果顯著降低,RMS的降低比僅有25.5%,而FOPPF1控制系統翼根應變響應RMS值的降低比可達58.4%,與標稱模型時的控制效果相當,且此時FOPPF1控制器獲得的PSD譜峰值衰減量較一階PPF控制器多了8.3 dB,控制能量的能耗率約只有一階PPF控制器的28%。
為了進一步尋找FOPPF1控制器的穩定邊界,本文還進一步增大附加質量快的質量,加大一階彎曲固有頻率的攝動量。試驗結果表明,當垂尾模型的固有頻率降低為11.5 Hz時(Δωc=-14.8%)時,FOPPF1控制器可獲得的RMS值降低比仍為45.7%,而一階PPF控制器已經發散。
以上試驗結果表明,對于階梯攝動模型,FOPPF1控制器不僅顯著提高了其魯棒性,且控制效果和能耗率也比一階PPF控制器明顯提高。

表2 隨機響應試驗結果Table 2 Experimental results of random response
5.2.2 在線攝動結構的隨機響應控制試驗
飛行器垂尾結構發生振動時,其固有頻率攝動往往在一定范圍內具有在線時變特性。為進一步說明FOPPF1控制器對于在線攝動結構的有效性,本節分別進行了垂尾固有頻率在線緩變與在線突變2種試驗。在線緩變試驗過程中,通過在垂尾梢部的2個容器中增加鐵砂來實時改變垂尾的固有頻率,即沙斗配置方案,單個容器裝滿鐵砂時的總質量為0.4 kg。在線突變試驗過程中,通過突然在垂尾頂端在線吸附2個質量塊引起垂尾固有頻率突變,單個質量塊的質量也為0.4 kg。因此最大攝動狀態下固有頻率的攝動量Δωc=-11.1%。
保持隨機激勵輸入與5.2.1節相同,在2種在線攝動模型下,FOPPF1控制器在開環與閉環狀態下測得的垂尾根部應變響應的PSD譜如圖11所示。FOPPF1控制器對在線緩變攝動模型可獲得的RMS值的降低比為53.5%,對在線突變攝動模型為59.4%,對應的PSD譜的峰值衰減量分別為10.38 dB與14.73 dB。試驗結果表明,FOPPF1控制器具有良好魯棒性,對結構固有頻率的在線變化同樣不敏感。
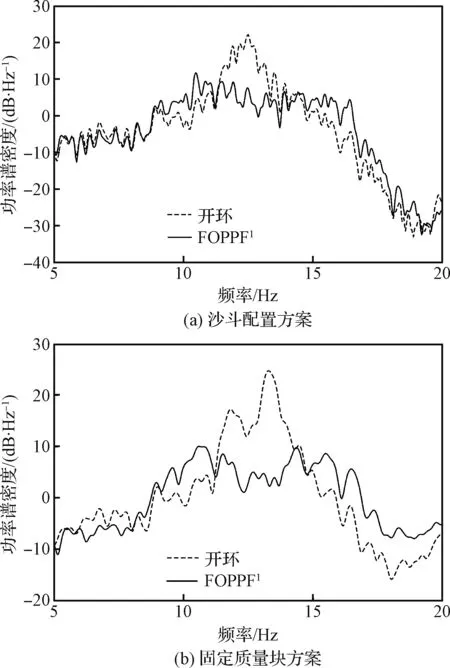
圖11 在線攝動結構的隨機響應PSD譜Fig.11 PSD spectra of random response of perturbation structure online
6 結 論
1) 基于分數階微積分理論,在一階PPF控制器的基礎上,引入2個分數階項,提出一種FOPPF1控制器。并構造了控制器參數優化設計的目標函數,采用粒子群優化算法可得到有效的控制器參數。
2) 相比一階PPF控制器,FOPPF1控制器在目標頻段內的相頻曲線變化平緩,可實現有效的相位補償,且閉環極點對參數攝動不敏感,使得控制器具有良好的魯棒性。
3) 以一個一端固支且粘有MFC壓電作動器的垂尾為例,設計了相應的FOPPF1控制器,通過振動主動控制試驗驗證了FOPPF1控制器的優異性能。試驗結果表明,FOPPF1控制器的控制效果與魯棒性均明顯提高,不同攝動模型下隨機響應的RMS值降低比達到58.4%,對參數在線攝動結構也有顯著的控制效果,并且該控制器的能耗率低,具有良好的應用前景。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
哲學評論(2021年2期)2021-08-22 01:53:34
天天愛科學(2020年6期)2020-09-10 07:22:44
中華詩詞(2019年7期)2019-11-25 01:43:04
數學物理學報(2017年6期)2018-01-22 02:26:40
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
湖北經濟學院學報·人文社科版(2015年8期)2015-12-29 05:53:07
現代企業(2015年9期)2015-02-28 18:56:50
上海電機學院學報(2015年4期)2015-02-28 14:30:00
計算物理(2014年2期)2014-03-11 17:01:44