燃料電池無人機動力系統方案設計與試驗
2018-08-29 05:26:50張曉輝劉莉戴月領沈輝
航空學報 2018年8期
關鍵詞:結構
張曉輝,劉莉,戴月領,沈輝
北京理工大學 宇航學院,北京 100081
燃料電池無人機是以燃料電池作為主要動力源的新型電動無人機,是中低空電動無人機長航時應用需求背景下最具潛力的無人機類型,已經成為當前國內外研究熱點[1-8]。一些驗證性的燃料電池無人機已經完成了試飛[9-12],并在不斷刷新航時紀錄,其中最具代表性的是美國海軍的離子虎無人機,已經突破48 h的航時紀錄[13]。
燃料電池動力系統與傳統內燃機動力系統相比,具有效率高、啟動快、動力控制簡單、可靠性高、聲熱噪聲小、且排放無污染的優點。但是,考慮到電機的電壓適用范圍有限,燃料電池作為主要能源時,特性較軟,電壓變化幅度較大,使用時一般需要配合直流轉直流(DC/DC)的電源轉換模塊或蓄電池,以匹配電源和電機的電壓。因此,基于燃料電池的動力系統可以具有多種拓撲結構。對于燃料電池無人機,不同的動力系統拓撲結構,其系統重量和復雜程度區別很大,對無人機的影響也各有優劣。
目前,國內外學者在燃料電池無人機及其關鍵技術方面已經開展了一定的研究工作。主要集中在燃料電池無人機總體方案設計[14-17]、基于某種動力系統的能源管理策略[18-22]以及探索性飛行驗證試驗等方面。對于燃料電池無人機動力系統方面開展的研究工作主要是結合以上工作,選擇一種動力系統方案,進行半實物仿真[23-24],或試驗特性研究[25-27],尚未見到針對不同動力系統開展的較為系統的比較和分析。
本文研究目的是在分析燃料電池無人機動力系統特點的基礎上,設計3種燃料電池動力系統拓撲結構方案。以空冷質子交換膜燃料電池為例,搭建燃料電池動力系統一體化試驗平臺。考慮多種加載形式,開展燃料電池動態特性和3種動力系統方案的對比試驗研究。基于實驗結果,給出3種方案的適應性建議,為燃料電池無人機設計以及針對不同任務需求時動力系統方案的選擇提供依據。
1 動力系統特點與拓撲結構方案設計
1.1 燃料電池無人機動力系統特點分析
燃料電池無人機動力系統主要由儲氫裝置、燃料電池、電子調速器、電機、螺旋槳,及其他輔助電力電子設備組成。
燃料電池動力系統具有儲能密度高、可支持更長飛行航時的優點。但與蓄電池動力系統相比,其功率密度較小;由于燃料在膜之間擴散,以及氫氧的電化學反應都需要一定的時間,其電力響應相比蓄電池要慢,且電壓特性較軟。大電流會導致大幅度的壓降,所以燃料電池一般需要配合DC/DC轉換器或蓄電池等輔助電力設備,以穩定匹配電源和電機的電壓。
因此,基于燃料電池的動力系統可以通過多種組合,形成不同的拓撲結構形式,以滿足無人機總體方案和任務需求。
1.2 燃料電池動力系統拓撲結構方案設計
燃料電池無人機動力系統,根據能源種類可以分為:純燃料電池動力系統和燃料電池/蓄電池混動力系統。其中,燃蓄混合動力系統又可根據能源管理方式,分為被/主動混合動力系統。本文設計了3種燃料電池(FC)動力系統拓撲結構方案以進行分析比較。
1.2.1 FC+DC/DC動力系統拓撲結構方案
本方案是純燃料電池動力系統方案,其拓撲結構如圖1所示。該方案中燃料電池直接通過直流/直流(DC/DC)轉換器為負載供電,具有動力系統結構簡單、重量較輕的優點。

圖1 燃料電池動力系統拓撲(FC+ DC/DC)Fig.1 Fuel cell power system topology (FC+ DC/DC)
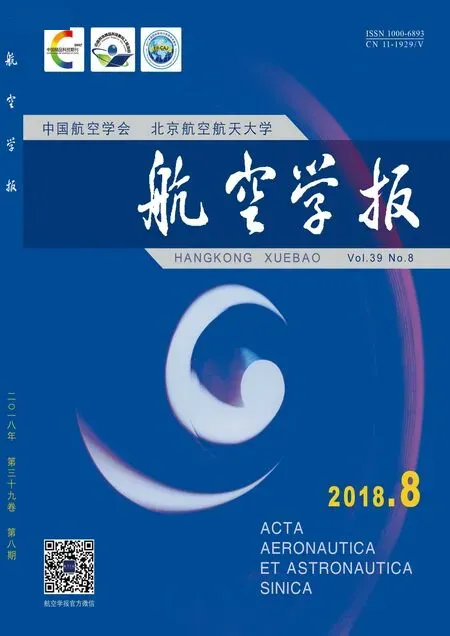
1.2.2 FC+B動力系統拓撲結構方案
本方案是燃料電池/鋰電池(簡稱燃鋰)混合式被動控制方案,其拓撲結構如圖2所示。方案中燃料電池與蓄電池被動混合供電,利用金屬氧化物半導體場效應晶體管(MOSFET)低功耗的特點和反向截止特性處理燃料電池與蓄電池并聯的電壓匹配問題,以防負載較低時燃料電池電壓較高而對蓄電池充電。該方案具有混合形式簡單,被動無控的功率流分配,無需充電管理的特點,其采用蓄電池突破燃料電池最大功率的限制,使無人機具有更大的機動性和抗風能力,也降低了無人機的設計難度。
1.2.3 FC+DC/DC+B動力系統拓撲結構方案
本方案是燃鋰混合式主動控制方案,其拓撲結構如圖3所示。方案中燃料電池與蓄電池主動混合供電,通過調節DC/DC轉換器輸出電流和電壓,實現對燃料電池功率的主動控制,而蓄電池則根據功率平衡的原則,被動實現充放電的控制。本方案可兼顧不同電源的電力特性,使燃料電池工作在高效區域,蓄電池充分發揮大功率快速響應的作用,同時也能夠進行合理的充放電管理,可提高系統效率,降低氫耗,增加航時,且延長使用壽命。

MOSFET—Metal Oxide Semiconductor Field Effect Transistor圖2 燃鋰混合被動控制動力系統拓撲 (FC+B)Fig.2 Hybrid fuel cell and battery power system topology with passive control (FC+B)
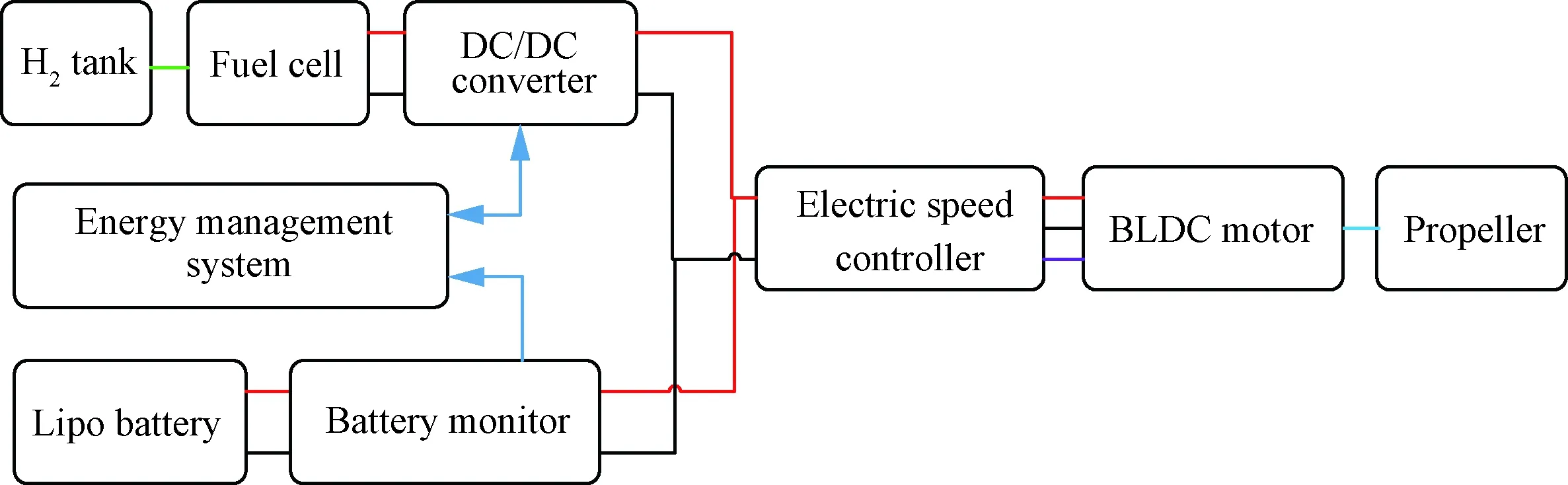
圖3 燃鋰混合主動控制動力系統拓撲 (FC+DC/DC+B)Fig.3 Hybrid fuel cell and battery power system topology with active control (FC+DC/DC+B)
2 燃料電池動力系統一體化試驗平臺
為了開展以上3種拓撲結構方案的試驗研究,本文以空冷質子交換膜燃料電池為例,搭建了燃料電池動力系統3種方案一體化試驗平臺。而作為輔助能源的蓄電池則采用能量密度較高的鋰電池。
2.1 空冷質子交換膜燃料電池系統
本文選用的EOS600空冷質子交換膜燃料電池(PEMFC)系統如圖4所示,其基本參數見表1。該燃料電池堆由40片電極板組成,其額定功率為600 W,具有結構簡單、體積小、重量輕等特點,適合應用于無人機動力系統。
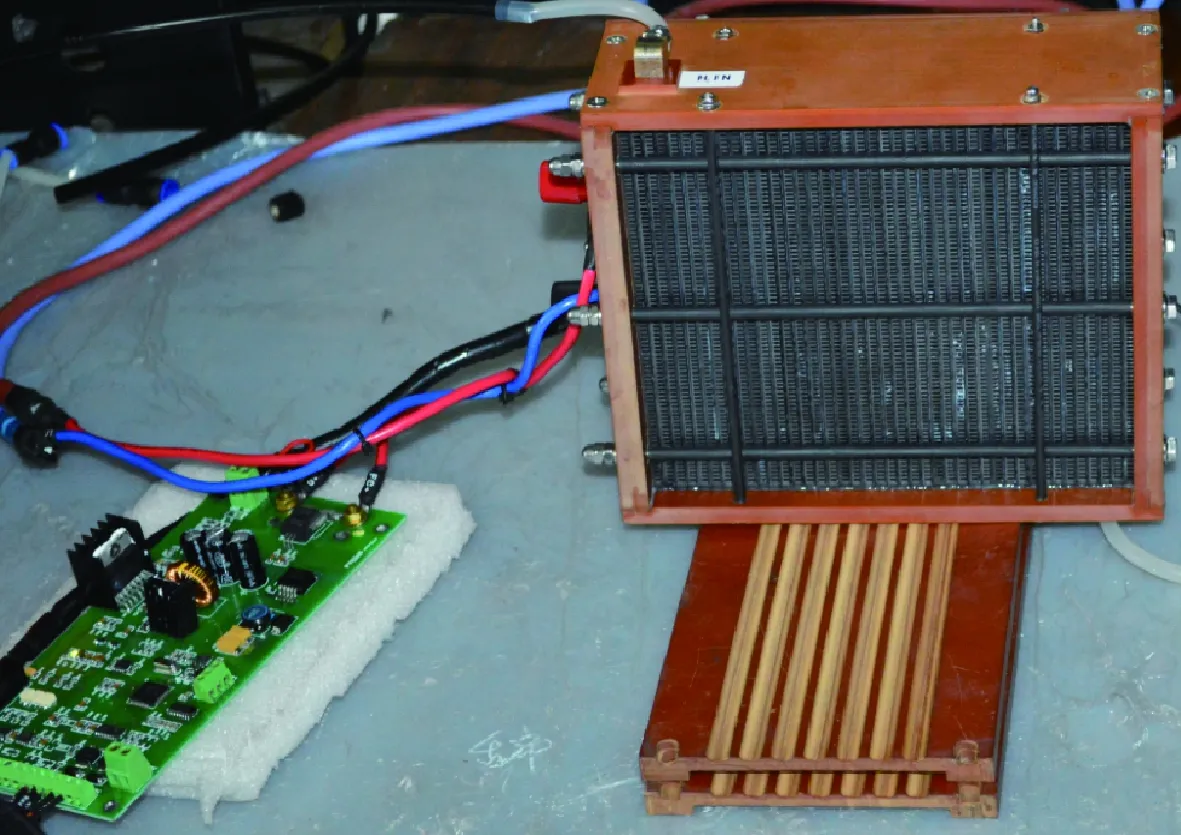
圖4 EOS600空冷質子交換膜燃料電池(PEMFC)系統Fig.4 EOS600 Proton Exchange Membrane Fuel Cell (PEMFC) System
表1 EOS600 PEMFC系統參數Table 1 Parameters of EOS600 PEMFC system
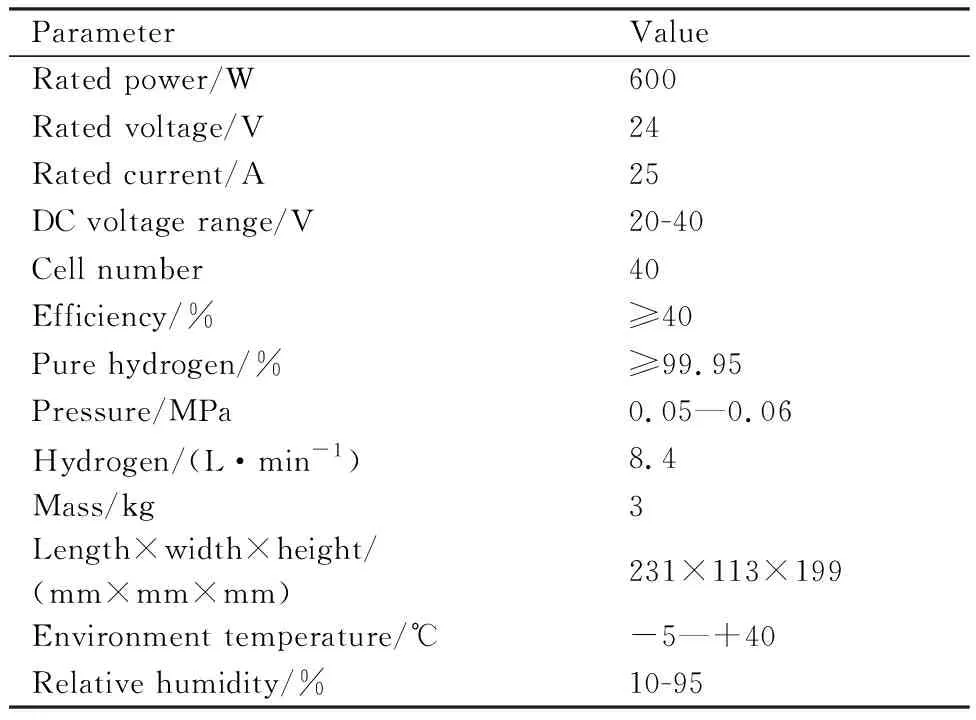
ParameterValueRated power/W600Rated voltage/V24Rated current/A25DC voltage range/V20-40Cell number40Efficiency/%≥40Pure hydrogen/%≥99.95Pressure/MPa0.05—0.06Hydrogen/(L·min-1)8.4Mass/kg3Length×width×height/(mm×mm×mm)231×113×199Environment temperature/℃-5—+40Relative humidity/%10-95
2.2 動力系統一體化試驗平臺框架
本文搭建了動力系統一體化試驗平臺,其結構框架如圖5所示,以用于:① 燃料電池動態性能測試;② FC+DC/DC拓撲結構方案測試;③ FC +B拓撲結構方案測試;④ FC+DC/DC+B拓撲結構方案測試。
試驗平臺主要包括:儲氫系統、燃料電池系統、蓄電池系統、能源管理系統、動態載荷模擬系統,以及試驗臺控制面板。其中,儲氫采用標準高壓儲氫鋼瓶;燃料電池系統和蓄電池系統分別為EOS600質子交換膜燃料電池和容量5.3 A·h最大放電倍率30 C的6 s格氏鋰電池;可編程DC/DC轉換器采用NiQor非隔離DC/DC模塊;能源管理控制器采用STM32F767的阿波羅開發板,主要用于采集和記錄電源系統狀態,以及嵌入一定的能源管理算法實現對DC/DC的合理控制;動態載荷模擬系統采用上位機控制ZY8717中鷹電子負載,通過上位機模擬任務工況產生負載信號發送至可編程電子負載以模擬電機所需功率;而試驗臺控制面板主要用于供氫控制、輔助設備配電、拓撲結構方案切換,以及緊急停車控制等。試驗平臺及設備如圖6所示。
3 試驗研究與結果分析
3.1 燃料電池動態特性試驗
燃料電池的動態特性直接影響燃料電池對負載波動的承載能力,也決定了電堆的適應能力和使用模式,是燃料電池控制器設計,以及燃料電池動力系統設計的重要依據。通過一體化試驗平臺的控制面板斷開DC/DC開關和蓄電池開關,閉合燃料電池通電開關,短路MOSFET管,打開通氫開關,啟動試驗。由于燃料電池電力特性較軟,大電流導致大壓降,本文采用2種加載形式,對動態響應和啟動特性進行分析。
第1種為階梯型功率剖面,功率先逐級增大再逐級下降,電子負載采用定功率模式,每級需求功率所占燃料電池的額定功率的百分比為:0%—10%—30%—60%—90%—60%—30%—10%—0%,且每級持續5 s。所得燃料電池功率響應和伏安特性變化如圖7所示。
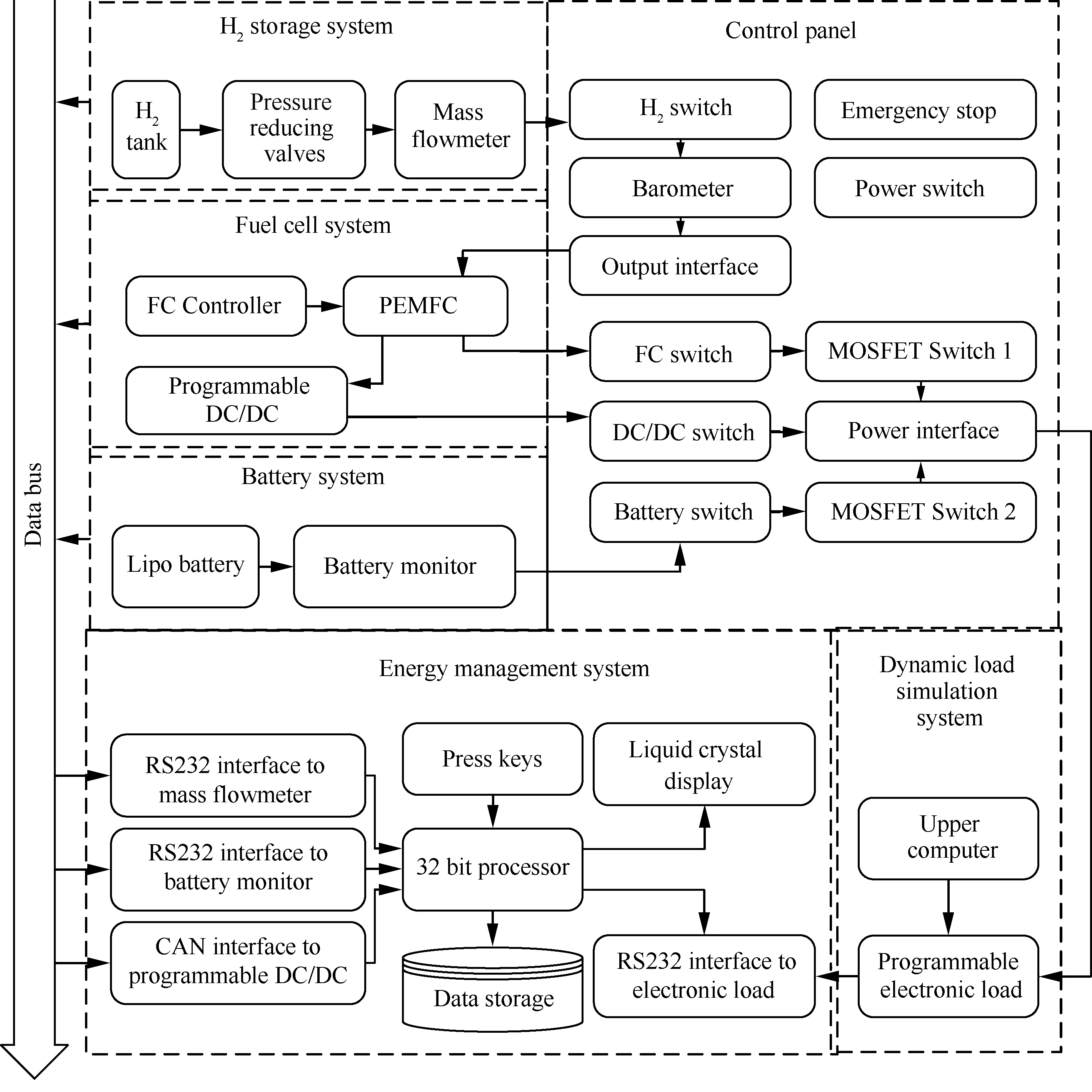
PEMFC—Proton Exchange Mebran Fuel Cell MOSFET—Metal Oxide Semiconductor Field Effect Transistor DC/DC—Direct Current/Direct Current圖5 一體化試驗平臺框圖Fig.5 Schematic of integrated test platform
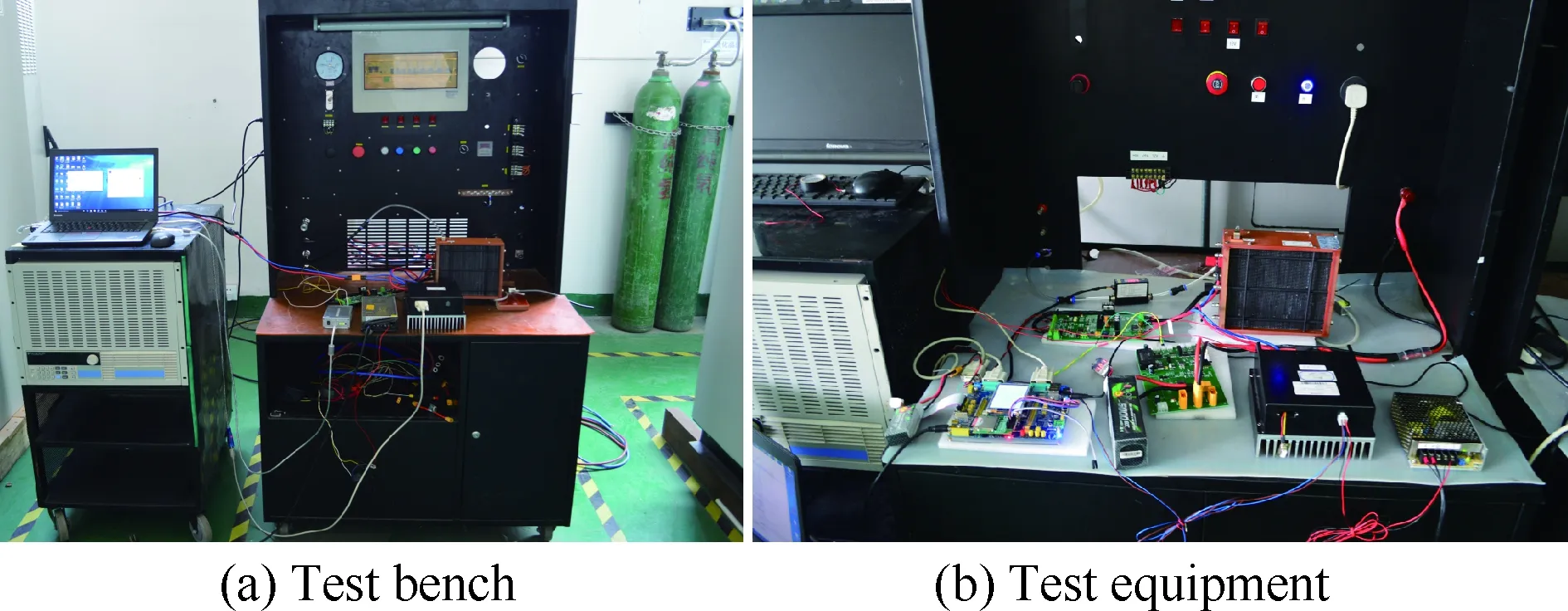
圖6 試驗平臺及設備Fig.6 Test bench and equipment
圖7(a)表明該燃料電池能夠及時跟蹤需求功率的逐級階梯變化,功率響應迅速。而圖7(b)則為燃料電池在滿足功率剖面的同時電壓和電流的變化情況,可見功率的逐級增大,導致電壓的逐級下降,電流的逐級增大,且在每級功率突變的1~2 s內,電壓陡降后會略微回升至穩定狀態,電流變化與之相反,這是由于極板間燃料的擴散和反應都需要一定的時間,從而導致工作狀態變化時達到穩定狀態需要一定的響應時間。結合逐級增大的功率變化幅度,可以得到突變幅度越大,這個反應時間越長。
第2種為階躍型功率剖面,主要測試燃料電池的大功率啟動特性,電子負載依然采用定功率模式,加載功率序列占燃料電池額定功率的百分比為:0%—50%—0%—40%—0%—30%—0%—20%—0%—10%—0%, 每步持續時間5 s,所得燃料電池的功率響應和伏安特性如圖8所示。
圖8(a)表明燃料電池啟動功率最大為50%額定功率時,燃料電池響應依然能夠及時跟蹤需求功率的變化,支持連續啟動和停止。圖8(b)顯示每次啟動都會導致電壓陡降和電流激增,而在功率穩定階段,電壓會緩增而電流緩降現象。其原因也是由于局部燃料濃差較大所致,且啟動功率越大,壓降幅度越大,電流陡增幅度也越大,壓降和電流恢復穩定的時間也越長。而由于燃料濃度長時間不足所引起的壓降,會導致燃料電池的產水過多,從而發生水淹現象損害燃料電池的使用壽命。因此,在使用過程應盡量避免過大的啟動功率,或大幅度的功率突變。
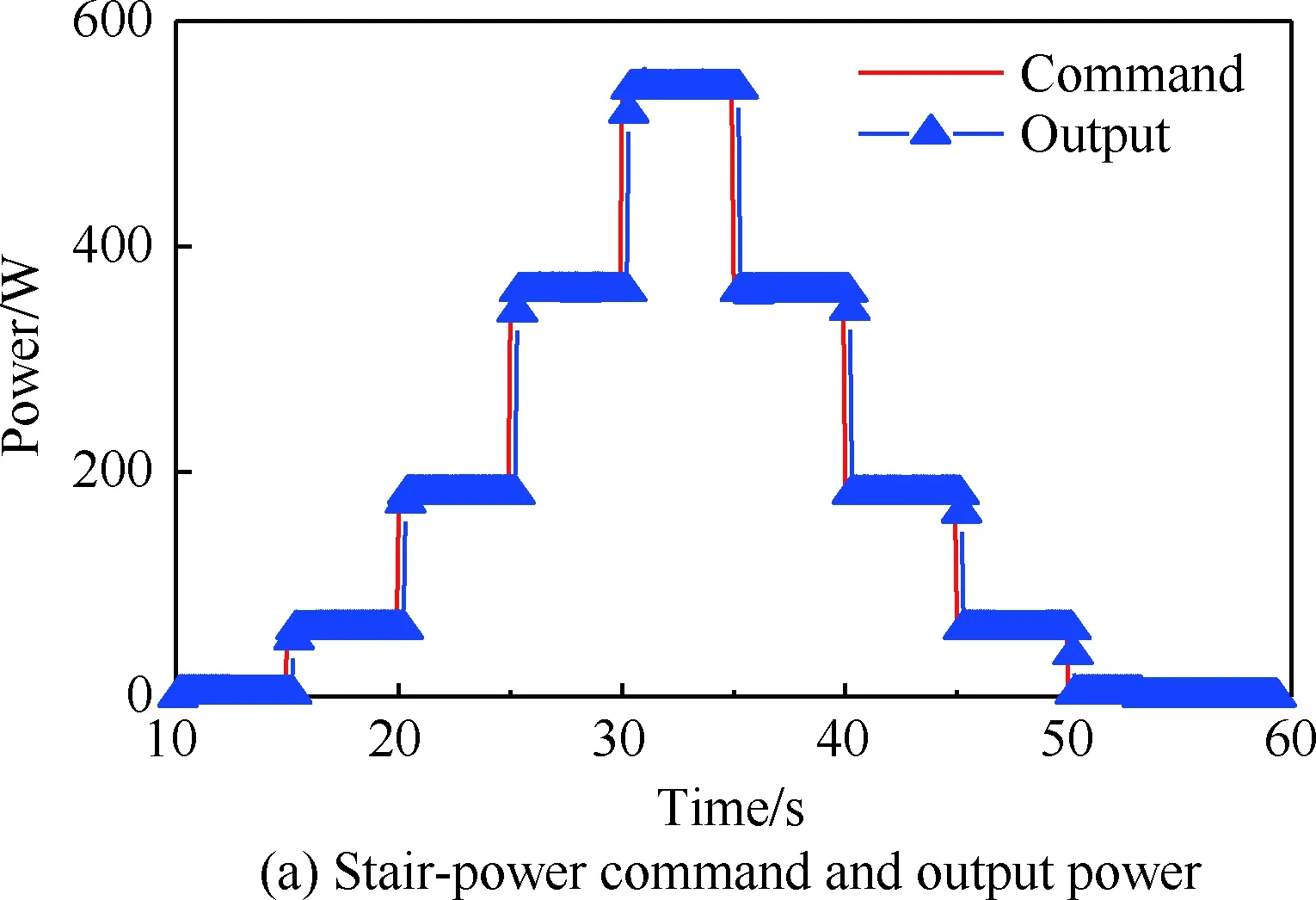
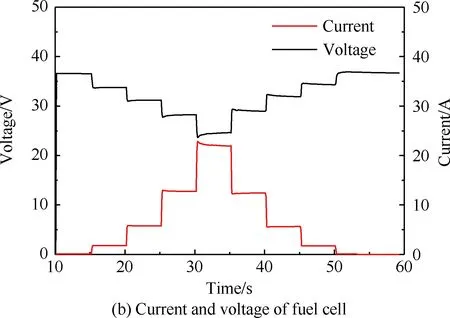
圖7 階梯型加載形式Fig.7 Stair-mission profile
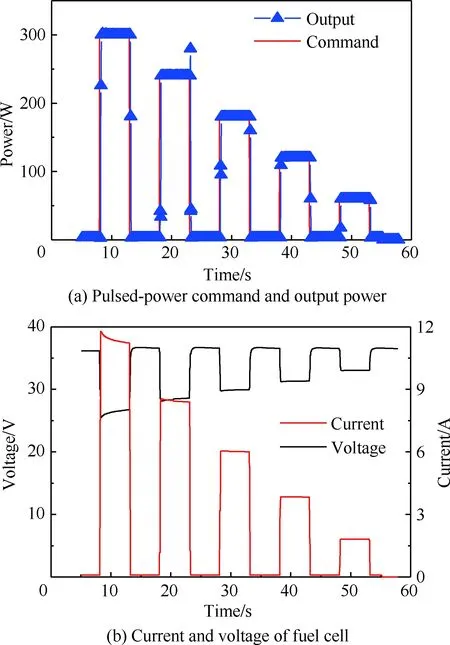
圖8 階躍型加載形式Fig.8 Pulsed-mission profile
3.2 純燃料電池動力系統試驗
對于純燃料電池動力系統結構方案,通過一體化試驗平臺控制面板斷開燃料電池開關和蓄電池開關,閉合DC/DC開關,短路MOSFET管,并通過能源管理系統設定DC/DC輸出電壓為25 V略低于鋰電池的充電截止電壓25.2 V,而電子負載以恒流模式按0 A—5 A—10 A—15 A—20 A—15 A—10 A—5 A—0 A的序列逐級加載,從而根據系統電流、電壓以及功率的變化情況分析DC/DC對系統電力性能的影響,以及該系統的優缺點,試驗結果如圖9所示。
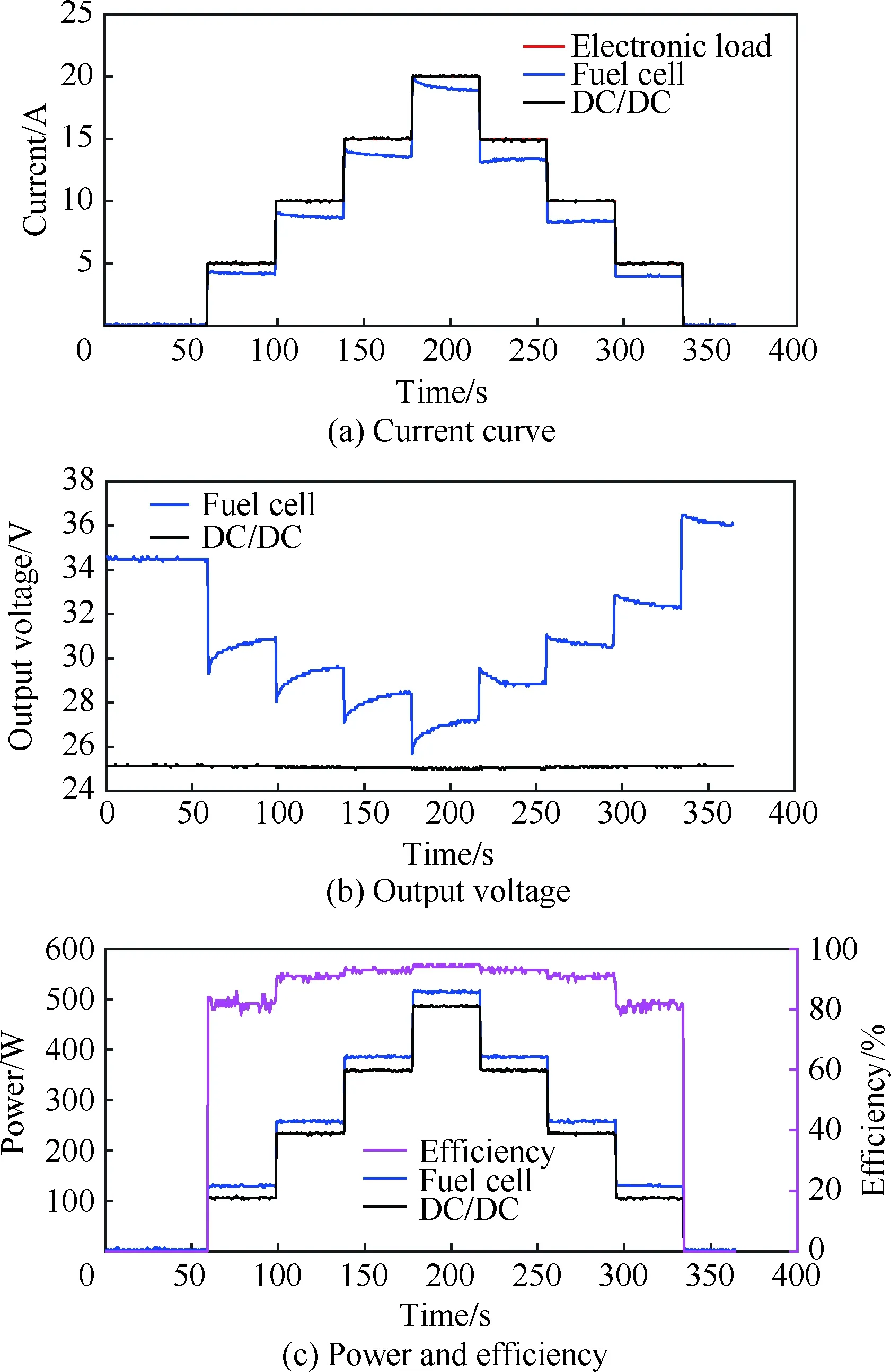
圖9 純燃料電池動力系統特性Fig.9 Characteristics of pure fuel cell power system
圖9(a)給出了電子負載的加載情況,以及燃料電池電流和通過DC/DC后的電流情況。可見燃料電池輸出電流低于通過DC/DC后的電流,而DC/DC的電流即等于電子負載的需求電流。之所以燃料電池的電流比通過DC/DC之后的電流小,是因為燃料電池的輸出電壓明顯高于DC/DC的輸出電壓,如圖9(b)所示,燃料電池的電壓隨電流加載而大幅度波動,而經過DC/DC穩壓后,輸出電壓始終穩定在25 V,從而達到了為直流總線提供穩定電壓的目的。而圖9(c)為燃料電池功率和通過DC/DC后的功率情況,以及DC/DC的效率。燃料電池與通過DC/DC后的功率差值為DC/DC進行功率轉換過程中所損失的功率,其通過的功率越大時轉換效率也越高,效率最低時也高于80%,而最高時可達到97%。
結果表明該系統結構可以提供高效穩壓的輸出條件,且結構也較為簡單,但其所提供的功率受燃料電池自身及DC/DC轉換效率的限制,無法應對無人機飛行過程中可能出現的突發干擾和高機動時的大功率需求。
3.3 被/主動燃鋰混合動力系統對比試驗
3.3.1 無人機參數和任務剖面
以澳大利亞的Aerosonde無人機[28]為動力系統驗證機,其總體參數見表2;所采用的任務剖面如圖10所示,包括爬升、巡航、下降、巡邏等任務階段,其中WP 1-WP 9為飛行任務航點,關于剖面的詳細信息可參考文獻[29]。
假設螺旋槳、電機和電子調速器的效率分別為60%,90%和90%,通過仿真得到總線的需求電功率隨時間的變化如圖11所示。其中,爬升階段的需求功率接近1 200 W,下降階段需求功率約400 W,巡航需求功率基本在500 W附近。飛行狀態轉換的機動過程,需求功率會劇烈波動,波幅明顯超過本文所選燃料電池的最大功率(600 W),因此純燃料電池動力系統方案可以維持巡航飛行,但無法滿足整個任務階段的機動要求。
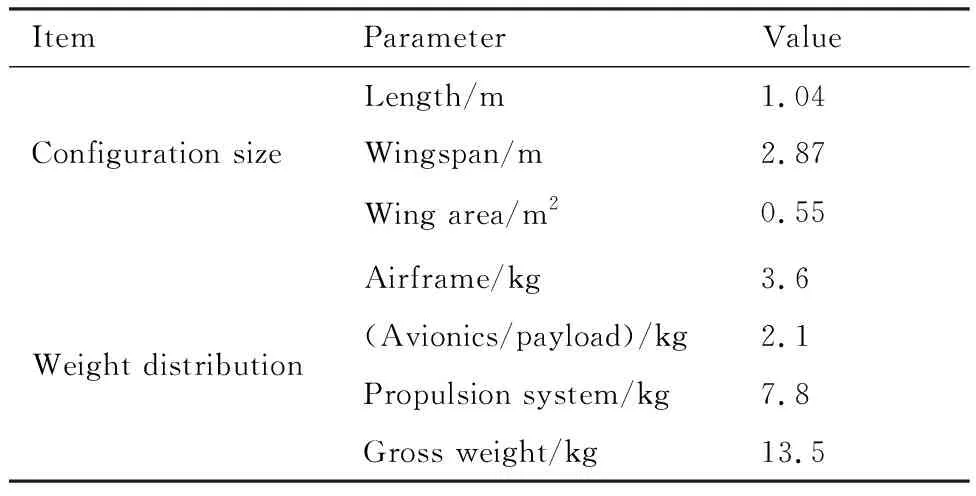
表2 Aerosonde無人機的參數Table 2 Parameters of Aerosonde UAV
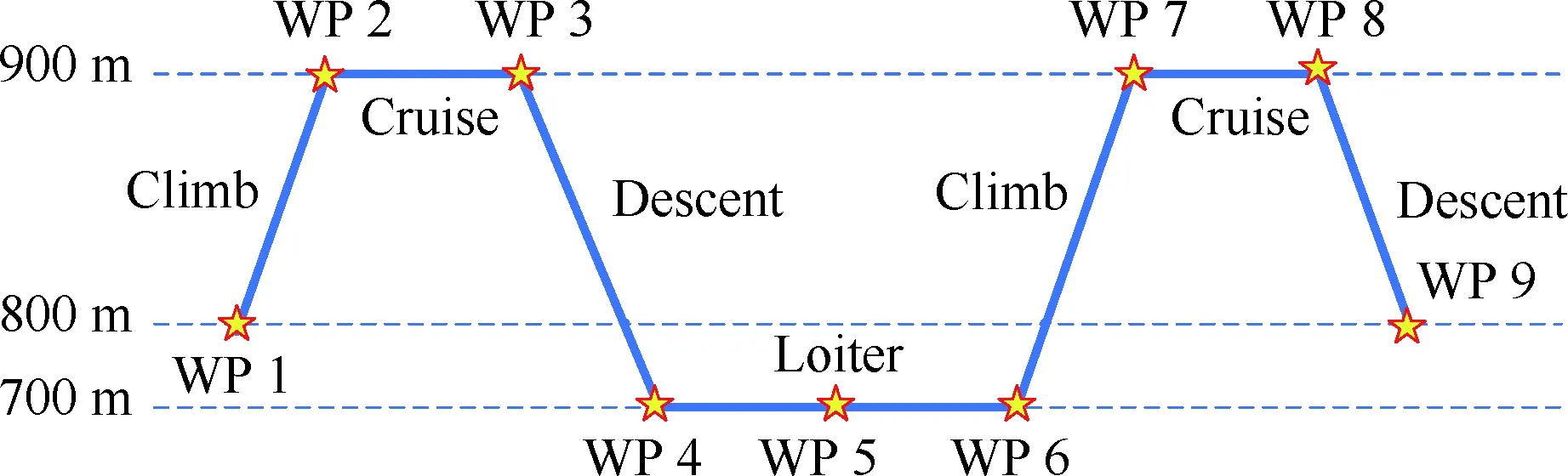
圖10 飛行任務剖面Fig.10 Flight mission profile
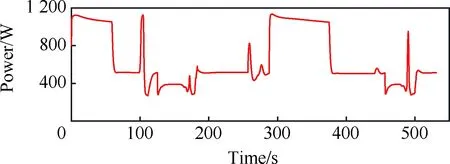
圖11 模擬飛行過程需求功率剖面Fig.11 Power demand profile of simulated flight
本文所設計的2種燃鋰混合方案可以克服純燃料電池動力系統最大功率的局限。2種燃鋰混合方案主要區別在于對蓄電池的管理。其中,燃鋰混合被動控制方案蓄電池只可放電無法充電,從感性角度降低充電過程所產生的額外氫氣消耗;燃鋰混合主動控制方案,則可實現燃料電池對鋰電池充電,且根據電源系統狀態和需求功率的情況,采用能源管理策略進行主動功率流的分配,本文采用在線模糊能源管理策略。
3.3.2 被/主動燃鋰混合系統試驗與對比分析
采用圖11所示的飛行需求功率剖面,通過一體化試驗平臺控制面板切換開關,進行拓撲結構的切換,分別進行被/主動燃鋰混合動力系統試驗,其能源輸出功率和能源系統狀態見圖12和圖13。
圖12(a)為2種燃鋰混合系統結構中的燃料電池通過DC/DC的輸出功率Pcovt情況,燃鋰混合主動結構方案中燃料電池通過DC/DC的輸出功率絕大部分時間明顯低于燃鋰混合被動結構方案,僅在第2次爬升階段兩者功率基本相同。
圖12(b)為鋰電池在2種結構方案中的輸出功率Pbatt情況,對于燃鋰混合被動結構方案,由于鋰電池電壓低于燃料電池電壓,鋰電池僅在需求功率超過燃料電池的最大功率時才會有輸出,否則鋰電池無輸出。燃鋰混合被動結構方案中采用MOSFET場效應管反向截止了充電電流,所以即使需求功率很低時,燃料電池也不會對鋰電池充電;而對于燃鋰混合主動結構方案,鋰電池一直有輸出功率,且在需求功率低于燃料電池額定功率時,能夠跟隨需求功率的波動,使得燃料電池盡量工作在穩定的狀態。通過比較2種結構方案功率流的分配情況,可以看出燃鋰混合主動結構方案中鋰電池的作用能夠充分的發揮,尤其是在功率波動較大的時候,能夠大幅分擔燃料電池的功率波動壓力,以減輕負載波動對燃料電池的沖擊,能夠更好地保護燃料電池。
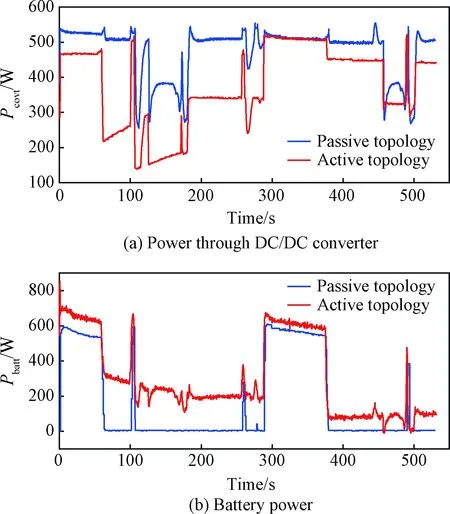
圖12 被動與主動拓撲結構輸出功率比較Fig.12 Comparison of output power between passive and active topology
圖13為被/主動結構方案中鋰電池當前剩余電量和氫耗的對比結果。圖13(a)顯示2種拓撲結構試驗中鋰電池初始電量為滿電狀態,且最終的剩余電量也基本相同,均由100%的電量放到約75%的狀態。但從蓄電池剩余電量狀態(State of Charge, SOC)也可看出被動結構基本為2個爬升階段的急劇放電,而主動結構則為持續的、較為緩和的放電。2種結構方案的鋰電池放電方式對燃料電池氫耗的影響如圖13(b)所示。主動結構方案在任務初始階段即第1次爬升階段,耗氫量幾乎一樣,而轉入平飛后,需求功率降低,2種結構方案的功率分配方式差異明顯,燃鋰混合主動結構方案中鋰電池持續發揮作用,使得氫氣消耗相對減少,最終僅消耗了62 L,而被動結構方案消耗了71 L,從而主動結構方案比被動結構方案節省約13%的氫耗。
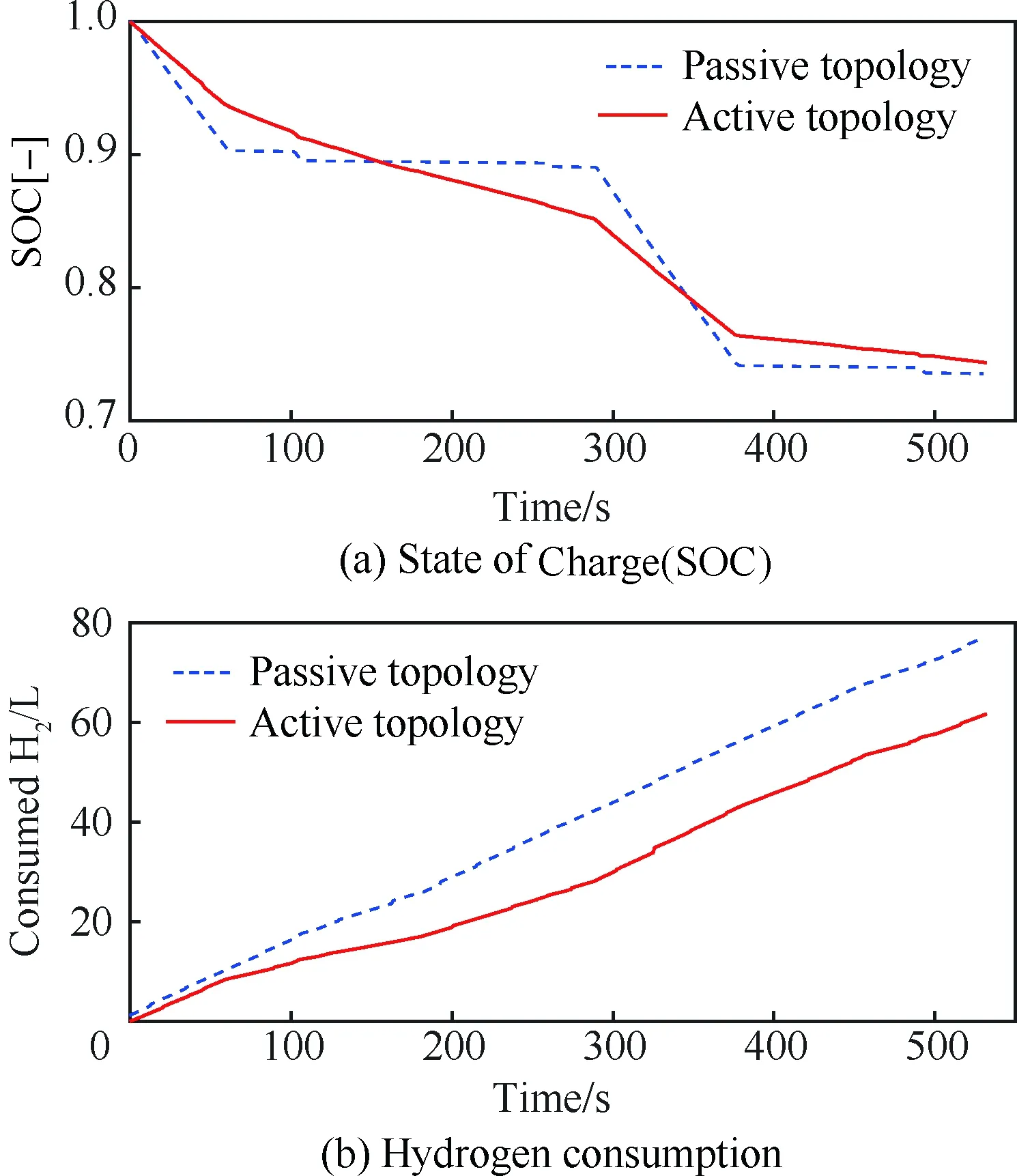
圖13 能源系統狀態對比Fig.13 Comparison of energy system state
3.4 3種動力系統方案特性
本文所設計的3種燃料電池動力系統方案各有特點,如表3所示。其中:Power為動力系統可提供的最大功率;Mass為不含儲氫裝置的動力系統重量;EMS為是否可用主動能源管理策略;Chargeable為是否可為蓄電池充電。對比可見,純燃料電池動力系統重量最輕,但局限于最大輸出功率較小,從而對任務剖面的適應性較差。而燃鋰混合被動方案以增加部分重量為代價克服了純燃料電池的缺陷,但無法進行鋰電池的充電,當鋰電池電量耗盡后也將失去大功率的優勢。燃鋰混合主動方案實現燃料電池為蓄電池充電的功能,采用主動能源管理方案進行功率流的分配,從而克服被動方案的缺陷,為進一步節省氫耗提供可探索的空間。
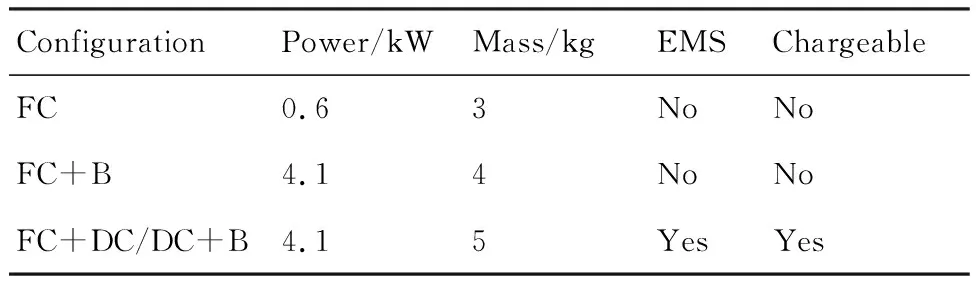
表3 3種動力系統方案特點對比
Note: EMS—Energy Management Strategy
4 結 論
基于本文搭建的燃料電池動力系統一體化試驗平臺,通過試驗研究了本文提出的3種燃料電池動力系統拓撲方案的特性,得出以下結論:
1) 燃料電池的功率特性能夠快速地跟蹤需求功率的變化,而其電壓和電流特性,更適應小幅度逐級加載的過程;瞬時大功率啟動時會導致電壓特性急劇下降,且恢復穩定時間較長,而電流與電壓趨勢相反。
2) 純燃料電池動力系統可以提供高效穩壓的輸出條件,且結構也較為簡單,但其所提供的功率受燃料電池自身及DC/DC轉換效率的限制,無法應對無人機飛行過程中可能出現的高機動大功率需求,適合用于結構簡單、重量較輕、機動性要求不高的小型無人機。
3) 燃料電池和蓄電池混合動力系統與純燃料電池動力系統相比,由于采用了鋰電池可以提供更大的功率,將短時大功率需求與燃鋰電池最大功率解耦,從而降低無人機的設計難度,且為燃料經濟性提供了優化可能。
4) 通過比較燃料電池和蓄電池被/主動混合動力系統試驗過程的功率流分配情況,可以看出燃鋰混合主動控制結構能夠充分發揮鋰電池的作用,不僅能在功率波動較大時,大幅降低對燃料電池的沖擊,而且可以減少氫氣的消耗。
5) 從拓撲結構重量和復雜度的角度分析,純燃料電池方案結構最輕也最簡單,但最大功率的約束限制了對任務剖面的適應性。燃料電池與鋰電池混合方案以犧牲部分重量和復雜度為代價,大幅提升無人機對任務剖面的適應能力,可滿足大機動需求。尤其對于中大型無人機,燃料電池與鋰電池混合方案所增加的重量影響相對較小,被動拓撲方案適用于大功率波動較少的任務,而主動拓撲方案對剖面的適應能力最強,可兼顧機動性和燃料經濟性,以支持更長航時的任務需求。
猜你喜歡
小獼猴智力畫刊(2023年4期)2023-04-23 08:49:58
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
中學生數理化·高一版(2018年1期)2018-02-10 05:20:03
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
七彩語文·寫字與書法(2016年7期)2016-07-28 21:40:22
七彩語文·寫字與書法(2016年6期)2016-07-15 19:36:34
人間(2015年21期)2015-03-11 15:23:21
現代企業(2015年9期)2015-02-28 18:56:50