自攀爬式玻璃幕墻清洗機器人的設計
2018-08-31 02:13:32
機械制造 2018年5期
關鍵詞:玻璃幕墻
青島科技大學機電工程學院 山東青島 266061
1 設計背景
目前,玻璃幕墻的清洗工作主要依靠人工[1]。在人工進行清洗作業的過程中事故頻發,使清潔工人的生命安全受到嚴重威脅,并且人工清洗效率低下,在一定程度上抑制了玻璃幕墻行業的發展。在智能機器人方面,目前的主流是吸盤吸附式清潔機器人,這種機器人相對于人工清洗而言安全且速度快,但是以此來代替人工清潔還相差甚遠,因為清洗效果遠不及人工清潔,越障能力方面技術也不成熟,只能在無邊框或隱形邊框的玻璃幕墻上工作,可靠性和安全程度受到制約[2]。可見,從安全和環境適應方面考慮,采用纜索式機器人進行清洗作業更安全,效果也更好。
圖1所示為一款真空吸盤式爬壁機器人,主要由真空吸盤、氣體分配器、鏈條約束罩、清洗機構、鏈輪鏈條、電動機、真空泵、離合器及蝸輪蝸桿組成[3]。機器人由電動機驅動,通過真空吸盤在壁面上攀爬,清洗機構同步清洗。鏈輪由電動機帶動,左右兩側真空吸盤分別由兩對鏈輪帶動,與玻璃幕墻壁面接觸的底面部分由真空泵形成真空,吸附在壁面上。由于真空吸盤與鏈輪一同轉動,因此在同步帶輪上嵌入氣體分配器,避免了真空吸盤與氣體分配器之間的管道纏繞。
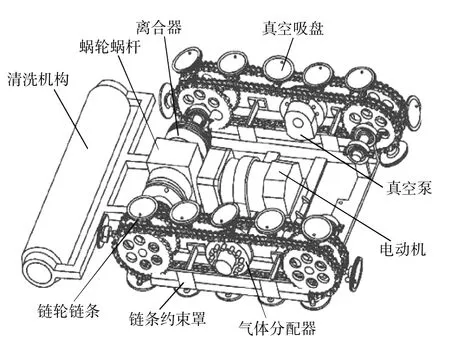
▲圖1 真空吸盤式爬壁機器人
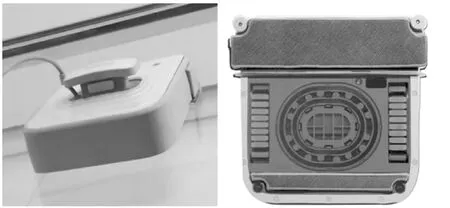
▲圖2 WRN70型擦窗機器人
科沃斯公司研制并且已經投入市場的WRN70型擦窗機器人[4]如圖2所示。該機器人清洗窗戶時依靠內外兩圈真空吸盤,在外圈真空吸盤失效后可由內圈真空吸盤提供吸附力,除此以外還有安全扣設計,提供了多重安全保障。在斷電情況下,該機器人由內部安全電池驅動,可以使用15 min左右。吸附機構承重為200 N,依靠履帶式防滑驅動輪在玻璃表面進行移動。該機器人的優點是設計小巧靈活、安全性高,缺點是清洗范圍必須保證在電源線可到達的范圍內,僅可服務于家庭式的玻璃表面清洗,清洗效率較低[5]。
2 整體方案
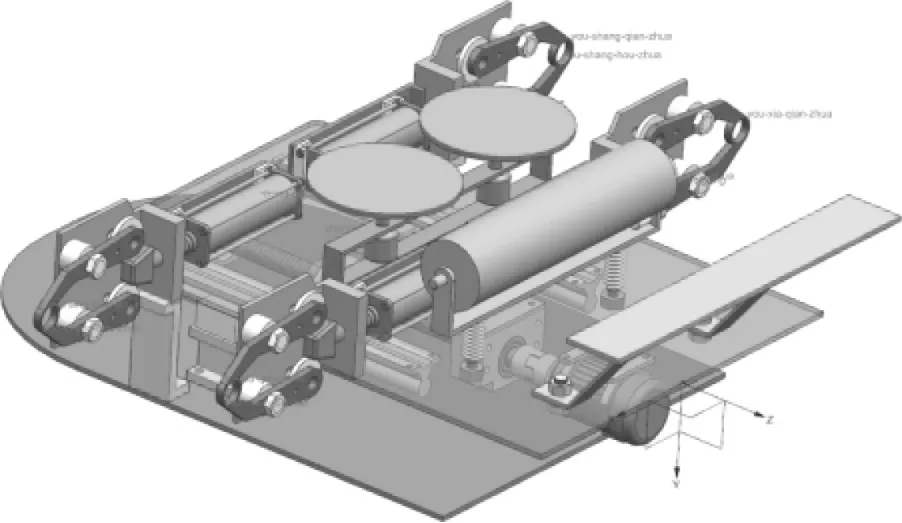
筆者基于國內外玻璃幕墻清洗機器人的結構設計和玻璃幕墻清洗的研究成果,設計了一種應用于中低層玻璃幕墻清洗,并可實現2 cm障礙跨越的自攀爬式玻璃幕墻清洗機器人。機器人本體可以在壁面上攀爬纜索進行移動,進而完成清洗工作[6]。機器人采用框架式結構,分上下兩層,中間用滾珠絲杠及支座連接。自攀爬式玻璃幕墻清洗機器人整機結構如圖3所示,具體包括夾緊纜索的夾緊部件、用于機器人本體在豎直方向進行運動的移動部件、對玻璃幕墻進行清洗及污水回收的清洗部件、將機器人本體進行懸吊的懸吊裝置及對清洗面進行監控的傳感器監控裝置。
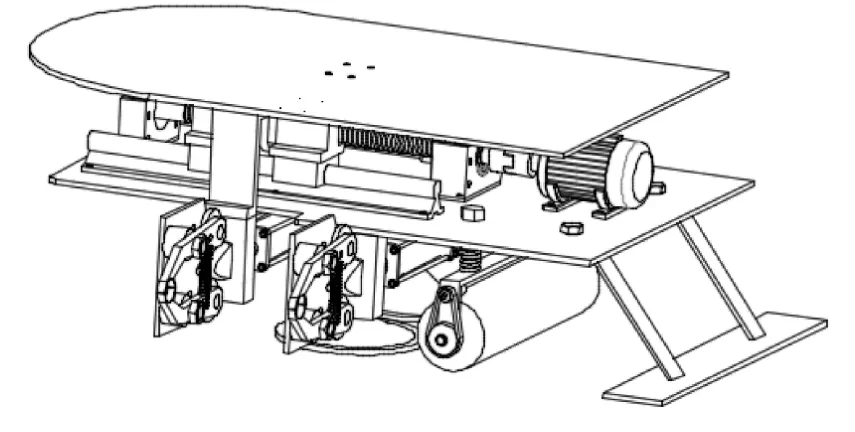
▲圖3 自攀爬式玻璃幕墻清洗機器人整機結構
3 部件設計
3.1 夾緊部件
夾緊部件是自攀爬式玻璃幕墻清洗機器人的重要組成部分[7],由夾緊爪、錐形頂桿、拉力彈簧、機架等組成,如圖4所示。夾緊爪用于對纜索的夾緊抓取,氣缸活塞桿驅動錐形頂桿為夾緊爪提供夾緊力,拉力彈簧用于夾緊爪的釋放。夾緊部件配合移動部件完成機器人整機的移動。夾緊爪對纜索的夾緊力是夾緊部件設計中的重要環節,夾緊力需要克服機器人自身重力所產生的靜載荷及工作過程中所產生的慣性載荷。夾緊力Fn的計算式為:

式中:K1為安全因子,K1=1.8;K2為工況因子,K2=1.002;K3為 方位因子,K3=1;G為機器人本體重力,G=294 N。
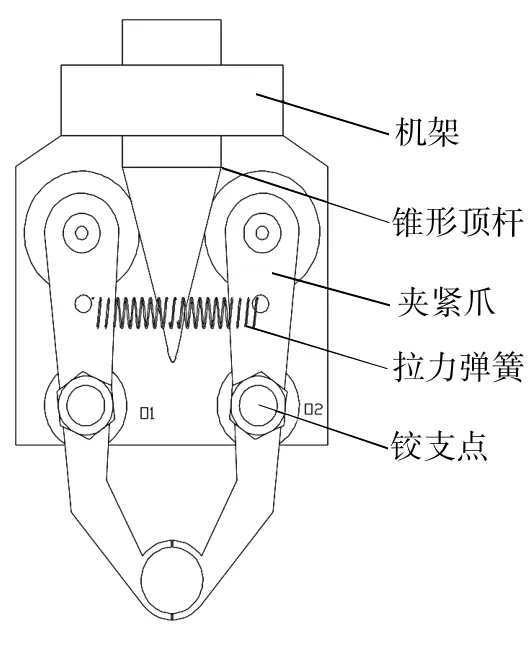
▲圖4 自攀爬式玻璃幕墻清洗機器人夾緊部件結構
相應參數代入式(1),解得Fn=530 N。
驅動氣缸選用單活塞桿雙作用氣缸[8],氣缸活塞桿端部裝有錐形頂桿,通過拉力彈簧和錐形頂桿來實現夾緊爪的張合[9]。對夾緊爪進行受力分析,得出:

式中:F為活塞桿驅動力,N;α為夾緊爪與活塞桿的夾角,α=30°。
相應參數代入式(2),解得F=408 N。
傳動效率η=0.85,則實際所需要的活塞桿驅動力Fc為:
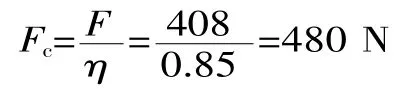
取氣壓p=0.6 MPa,則氣缸直徑D為:
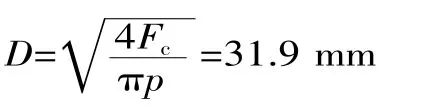
根據液壓氣壓手冊中的缸體內徑系列,圓整后取氣缸直徑D=32 mm,活塞桿直徑d=0.5D=16 mm,氣缸缸體長度L≤(20~30)D,取L=130 mm。
3.2 移動部件
在玻璃壁面豎直方向沒有障礙的前提條件下,自攀爬式玻璃幕墻清洗機器人可以在豎直方向壁面上通過絲杠螺母機構實現連續移動,在水平方向上則以人工輔助方式,配合懸吊裝置來完成移動。整體結構由三維運動轉換為二維運動,在很大程度上簡化了機構,工作的安全性、可靠性也得到大幅度提高。自攀爬式玻璃幕墻清洗機器人移動部件結構如圖5所示。
移動部件工作過程如下:① 初始狀態時,上板和下板兩組夾緊氣缸的活塞桿均處于伸出狀態,使夾緊爪夾緊纜索,上板和下板均處于靜止狀態;② 上板夾緊氣缸的活塞桿收縮,夾緊爪在拉力彈簧作用下分開,電動機接收到控制系統發送的信號轉動,使絲杠螺母機構帶動上板移動預設的距離;③上板夾緊氣缸的活塞桿伸出,夾緊爪夾緊纜索,上板和下板兩組夾緊裝置的夾緊爪處于夾緊狀態,上板和下板均處于靜止狀態;④下板夾緊氣缸的活塞桿收縮,夾緊爪在拉力彈簧的作用下分開,電動機接收到控制系統發送的信號轉動,使絲杠螺母機構帶動下板移動預設的距離;⑤下板夾緊氣缸的活塞桿伸出,夾緊爪夾緊纜索,上板和下板兩組夾緊裝置的夾緊爪處于夾緊狀態,上板和下板均處于靜止狀態,完成一個移動周期。如此多次反復,利用上下板的相對運動實現機器人的移動。
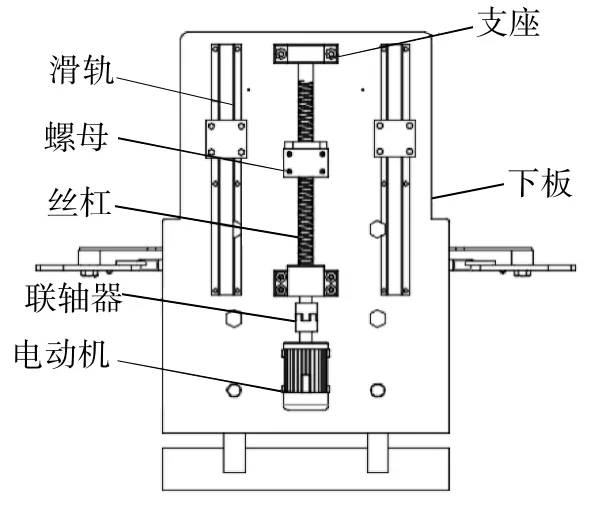
▲圖5 自攀爬式玻璃幕墻清洗機器人移動部件結構
自攀爬式玻璃幕墻清洗機器人在正常移動清洗過程中采取上下板交替的移動方式[10],在夾緊部件作用下實現豎直移動,在懸吊裝置作用下實現水平移動,這種移動方式的優點在于結構緊湊、移動平穩。
3.3 清洗部件
自攀爬式玻璃幕墻清洗機器人設計采用國內外主流工作方式:噴水、滾刷、盤刷,這種工作方式具有較強的去污效果,工作可靠性毋庸置疑。通過噴霧嘴對壁面進行濕潤,在清洗液和機械力的雙重作用下將壁面與污染物、灰塵分離,利用擦板將壁面多余的水體擦拭干凈,實現壁面的清潔。清洗過程中多余的清洗液經過刮板進入過濾回收裝置,待凈化、過濾之后重復利用,提高了清洗液利用率。自攀爬式玻璃幕墻清洗機器人清洗過程框圖如圖6所示。
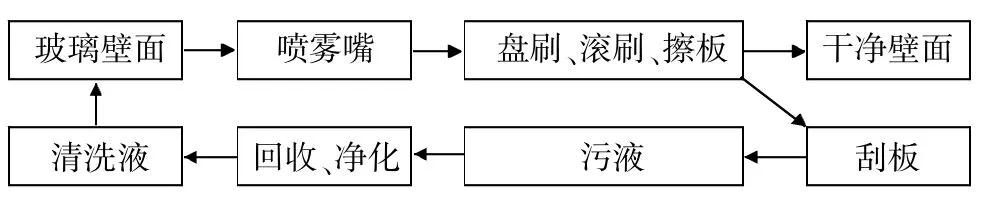
▲圖6 自攀爬式玻璃幕墻清洗機器人清洗過程框圖
滾刷是自攀爬式玻璃幕墻清洗機器人進行清洗作業的執行機構,電動機和帶傳動裝置組成清洗部件驅動機構。電動機固定安裝在支架上,機器人下板與滾刷連接,中間有緩沖彈簧,可以實現機器人跨越式行走,并具有減振效果。滾刷結構如圖7所示。
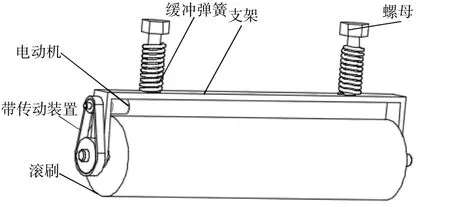
▲圖7 滾刷結構
盤刷結構如圖8所示。電動機將動力傳遞給盤刷,為防止污水濺出,將兩個盤刷設計為反方向轉動,使污水在中間收集,防止造成二次污染。
4 夾緊部件仿真分析
4.1 三維建模
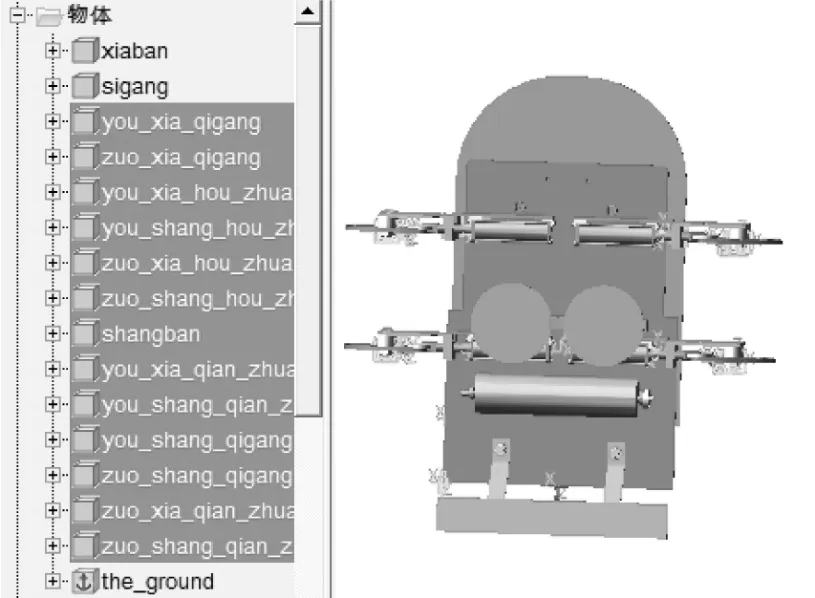
在SolidWorks軟件中創建夾緊部件三維模型,然后將整個裝配體導出為.xt格式,再導入ADAMS軟件,三維模型效果如圖9所示。夾緊部件由上板、左上氣缸及夾緊爪、右上氣缸及夾緊爪、下板、左下氣缸及夾緊爪、右下氣缸及夾緊爪、絲杠等組成。
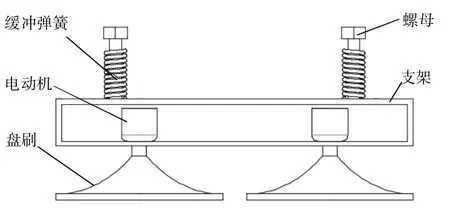
▲圖8 盤刷結構
▲圖9 夾緊部件三維模型效果圖
4.2 創建錐形頂桿
根據夾緊部件實際運動情況,創建錐形頂桿,如圖10所示。
▲圖10 創建錐形頂桿示意圖
4.3 創建運動副及驅動
根據夾緊部件實際運動情況,創建上板、下板、氣缸、夾緊爪、絲杠螺母機構等運動副,如圖11所示。
根據驅動函數,對相應的運動副創建驅動,如圖12所示。
4.4 創建接觸
在夾爪緊與錐形頂桿、夾緊爪之間創建接觸,如圖13所示。接觸參數可以根據試驗情況進行調整。
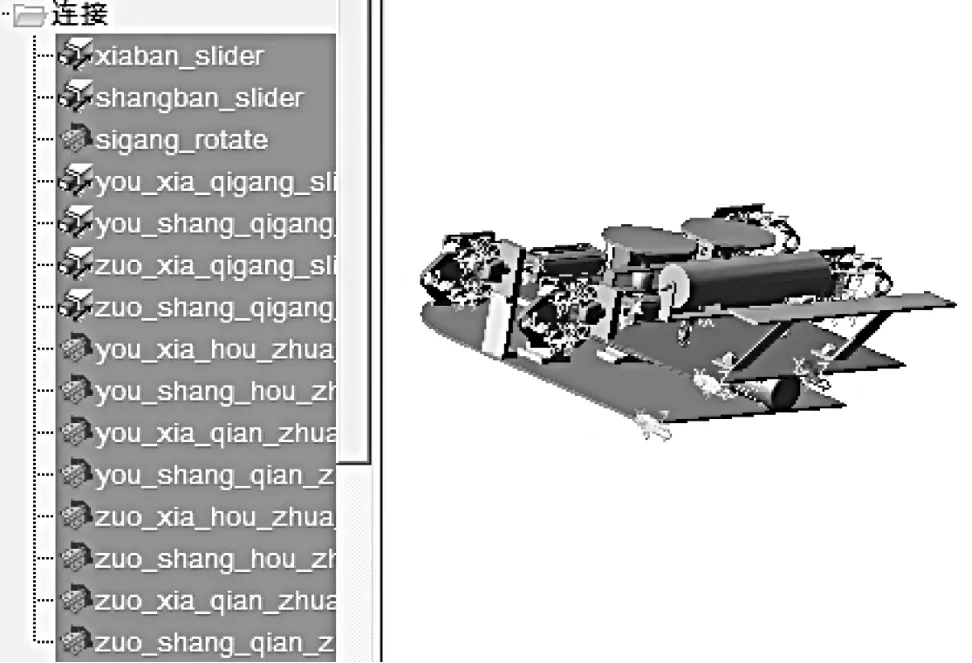
▲圖11 創建運動副示意圖
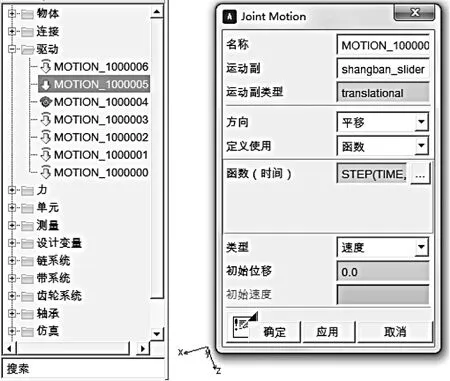
▲圖12 創建運動副驅動示意圖
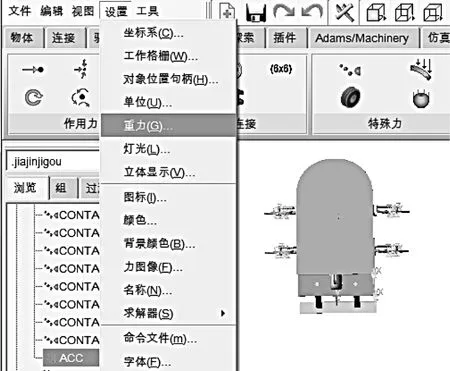
4.5 創建重力及彈簧
對夾緊部件創建沿+Z軸方向的重力,重力加速度為 9.8 m/s2,如圖 14所示。
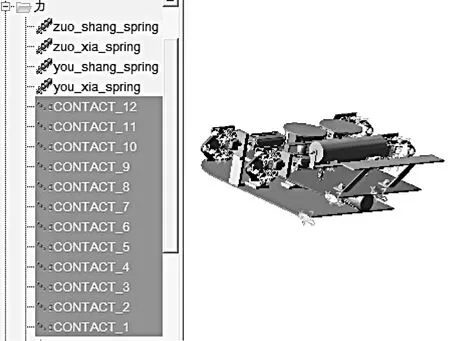
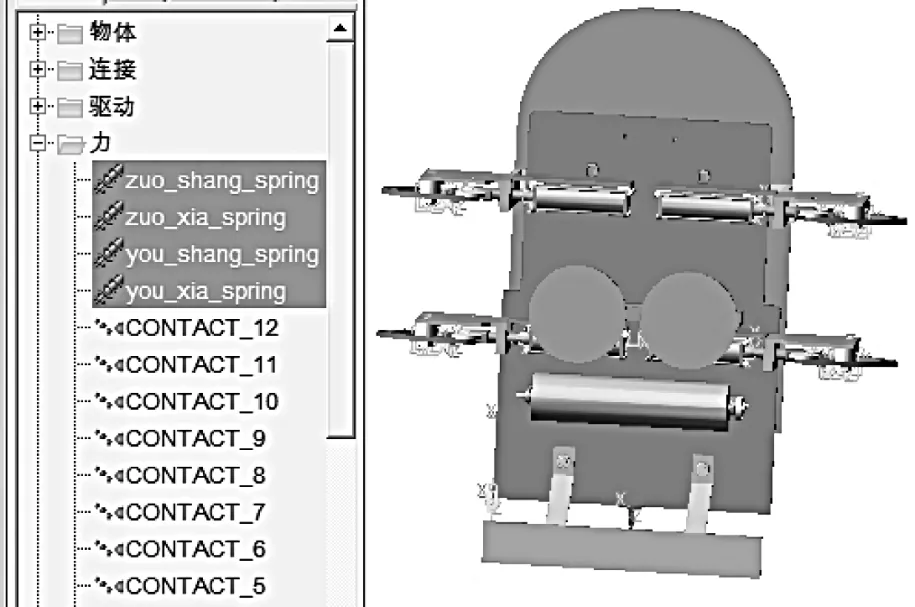
根據夾緊爪實際情況,在拉力彈簧裝配位置創建4個彈簧剛度系數為10 N/mm的拉力彈簧,如圖15所示。
4.6 創建計算方案并求解
夾緊部件作為自攀爬式玻璃幕墻清洗機器人的重要組成部分,其承載能力直接影響機器人的效率和壽命,所以對夾緊部件進行動力學分析十分有必要[11-13]。創建求解方案,設置求解終止時間為4.6 s,求解總步數為460步,求解計算結果如圖16~圖18所示。
氣缸活塞桿位移、速度和加速度曲線反映了氣缸活塞桿在一個周期內的運動效果。氣缸活塞桿夾緊力曲線如圖19、圖 20所示。
由圖19、圖20可以看出,夾緊爪在夾緊和松開狀態下受力大小與計算值吻合,且大于計算值,稍有冗余,保證了自攀爬式玻璃幕墻清洗機器人在工作過程中的穩定性。仿真結果與理論分析相符。
▲圖13 創建接觸示意圖
▲圖14 創建重力示意圖
▲圖15 創建拉力彈簧示意圖
拉力彈簧受力曲線如圖21所示,可以看出在夾緊爪夾緊和松開狀態下,拉力彈簧受力分別為538.7 N和605 N,沒有超出拉力彈簧的彈性極限強度,仿真結果是可行的。
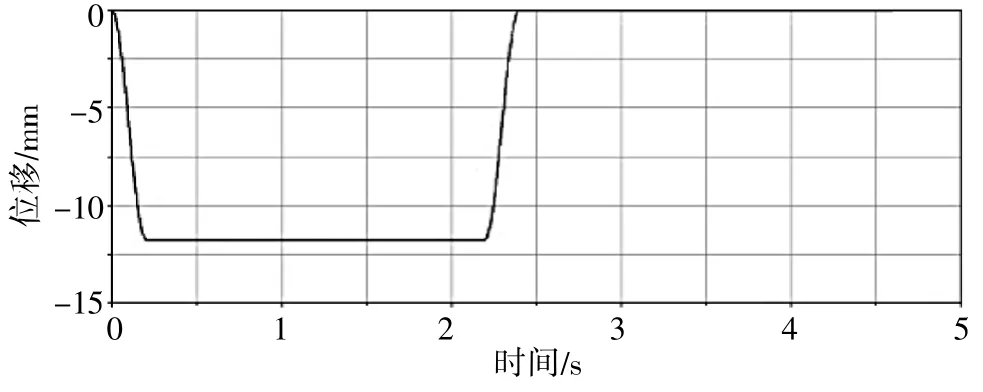
▲圖16 氣缸活塞桿位移曲線
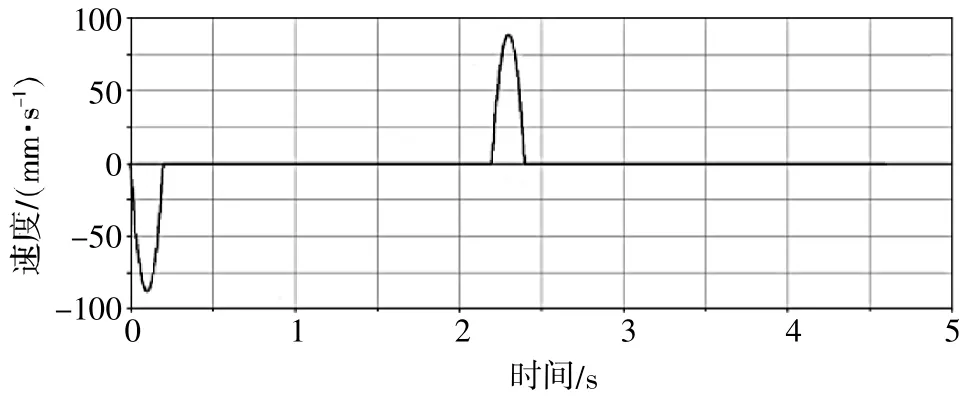
▲圖17 氣缸活塞桿速度曲線
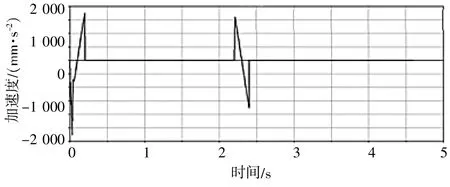
▲圖18 氣缸活塞桿加速度曲線
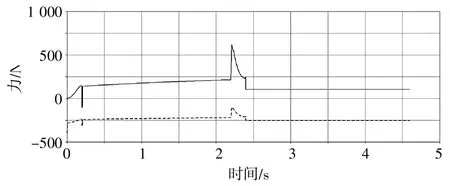
▲圖19 夾緊爪放松過程夾緊力曲線
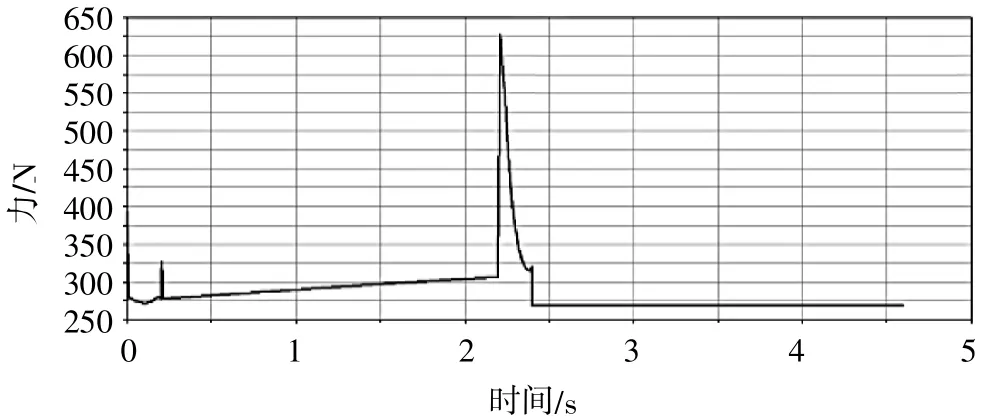
▲圖20 夾緊爪夾緊過程夾緊力曲線
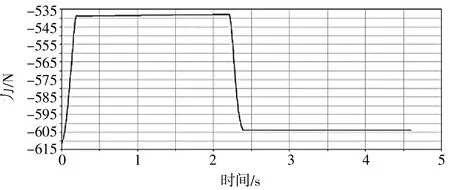
▲圖21 拉力彈簧受力曲線
5 結束語
根據玻璃幕墻清洗的需求,設計了自攀爬式玻璃幕墻清洗機器人的主體、夾緊部件、移動部件、清洗部件。應用SolidWorks軟件建立了機器人三維模型,將模型導入 ADAMS軟件,通過施加各種轉動副、約束副和定義接觸,建立虛擬樣機模型。通過應用Step階躍函數對虛擬樣機定義運動,施加載荷,對夾緊部件進行了工作工況下的動力學仿真分析,得出夾緊部件隨時間變化曲線,并與理論值進行比較,使機器人在結構上更加完善。
猜你喜歡
建材發展導向(2023年10期)2023-05-19 07:29:26
建材發展導向(2022年23期)2022-12-22 07:31:46
建材發展導向(2021年15期)2021-11-05 08:21:58
建材發展導向(2021年16期)2021-10-12 05:39:52
建材發展導向(2021年11期)2021-07-28 06:58:00
建材發展導向(2021年10期)2021-07-16 07:14:20
上海建材(2019年3期)2019-09-18 01:50:52
建材發展導向(2019年10期)2019-08-24 06:26:00
中國建筑金屬結構(2019年6期)2019-07-08 03:39:14
上海建材(2018年4期)2018-11-13 01:08:54