空間目標多星多角度實時近距離三維詳查研究
2018-09-07 03:20:44許丹丹張慶展羅亞中
上海航天 2018年4期
許丹丹,張慶展,張 進,羅亞中
(1.國防科技大學 空天科學學院,長沙 410073; 2.上海宇航系統工程研究所,上海 201109)
0 引言
隨著航天技術的發展,各航天大國對大中型空間目標在軌補給、維護維修,以及空間失效目標抓捕俘獲、拖曳移除等在軌近距離操作方面正開展研究。如:日本早在1997年就實施了ETS-VII計劃,開展了自主交會對接、目標星監測、燃料補給等試驗[1];俄羅斯于2014年、2015年通過發射宇宙2499衛星、宇宙2504衛星、Olymp高軌衛星對抵近偵查、近距拍照、伴飛監視等空間自主機動技術進行了驗證;美國通過實施軌道快車、試驗衛星等項目驗證了多項在軌近距離操作技術[2-3]。
利用星載傳感器獲取空間目標的詳細信息是成功實現在軌近距離操作的前提。目前,美國已初步具備了體系化的空間目標監測能力,如:MiTEx衛星可協同進行軌道機動及對在軌目標成像監測,以掌握高軌空間態勢[4];GSSAP衛星采取雙星組網,通過變軌機動對地球同步軌道的空間目標持續開展近距離成像偵察,為美國開展太空活動提供更詳細的信息[5]。空間目標監測是掌握和評估空間活動態勢的重要保障,對空間目標進行三維觀測,獲取在軌操作所需信息,并在操作過程中實時監視與評估操作效果,具有重要意義。
ETS-VII計劃、軌道快車、試驗衛星、MiTEx衛星、GSSAP衛星等項目[1-5]主要集中在單顆衛星的近距離操作方面,而衛星近距離觀測研究主要集中在繞飛軌道設計、圖像解算等方面,國內外鮮有這方面的研究報道。
單顆觀測衛星由于受傳感器視場和相對軌道構型等限制,難以快速、準確地完成對空間目標的詳查任務,而多星協同工作可攜帶多種測量設備對目標進行三維觀測,獲取目標多種頻譜特性,具有快速靈活、可靠性高等優點,可彌補觀測時空間隙,克服單星對于分散空間目標可能無法連續觀測的缺點。
本文針對多顆觀測衛星協同近距離繞飛詳查任務,綜合衛星編隊相對軌道運動與觀測任務的特點,采用網格統計法分析單/多顆觀測衛星對空間目標觀測過程中的詳查覆蓋率、詳查最短時間等性能指標,比較不同繞飛距離對觀測效果的影響;以繞飛橢圓半長軸、觀測衛星相對軌道傾角、相對相位差等為整體設計變量,將觀測衛星視場范圍、安全性等為約束條件,綜合考慮任務要求、任務時間等目標,設計了多顆觀測衛星協同工作的策略,并比較了不同編隊對任務特性的影響,以實現實時、全覆蓋觀測。
1 空間觀測約束條件
1.1 目標幾何模型
簡化后的空間目標由1個長方體本體及2個平面板太陽翼近似表征,如圖1所示。空間目標本體的坐標系定義為:長方體的幾何中心點為坐標原點O,沿著長方體的長、寬、高的方向分別為x、y、z軸,長度方向的單位矢量為dl,寬度方向的單位矢量為dw,高度方向的單位矢量dh=dl×dw。在本體坐標系下可描述長方體、平面板的大小與姿態,確定空間目標的狀態。

圖1 目標幾何模型Fig.1 Target geometric model
假設目標的長方體本體對地定向,則在相對軌道坐標系下,長方體保持靜止狀態;平面板與z軸方向的夾角為γ,以角速度ω0繞y軸旋轉,且ω0與太陽在相對坐標系下的平均軌道角速度相同,γ=γ0+ω0t。旋轉平面板的位置坐標類似旋轉長方體,任意點P的位置坐標在以原點O為中心的旋轉坐標系下可表示為
[x′y′z′]T=TR·[xyz]T
(1)
點P的坐標與自旋軸OM的位置、轉動角速度ω有關,自旋軸OM在軌道坐標系下的方向余弦分別為c1、c2、c3,則點P繞OM軸轉動λ到達點P′的變換矩陣[6-7]為
(2)
式中:λ=ω(t-t0)。t0時刻,衛星的本體坐標系與相對軌道坐標系重合。
1.2 三維觀測約束條件
三維觀測采用自然繞飛式編隊構型方案,觀測衛星對空間目標進行光學觀測需滿足以下要求。
1.2.1 陽照區
空間目標只有在陽照區才能被觀測衛星的可見光傳感器所觀測,該要求可表示為[8]
(3)



圖2 光學可見性約束Fig.2 Optical visibility constraints
1.2.2 視場無強光干擾

(4)


(5)
1.2.3 相對角速度
空間目標與觀測衛星的相對角速度為
(6)
1.2.4 觀測視場角
觀測點與目標的空間幾何關系如圖3所示。每顆觀測衛星均安裝視場半錐角為Δg的星載敏感器,敏感器視場中心始終指向目標幾何中心。圖中:dir0為觀測點指向空間目標中心的方向向量;dir1為某成像點指向觀測點的方向向量;dir2為空間目標某表面幾何中心指向該觀測點的方向向量。假設成像點視線方向相對敏感器視場中心方向的夾角為θ、平面正法向量n與觀測點方向dir2的夾角為α,則
θ=arccos(-dir1·dir0),α=arccos(n·dir2)
(7)
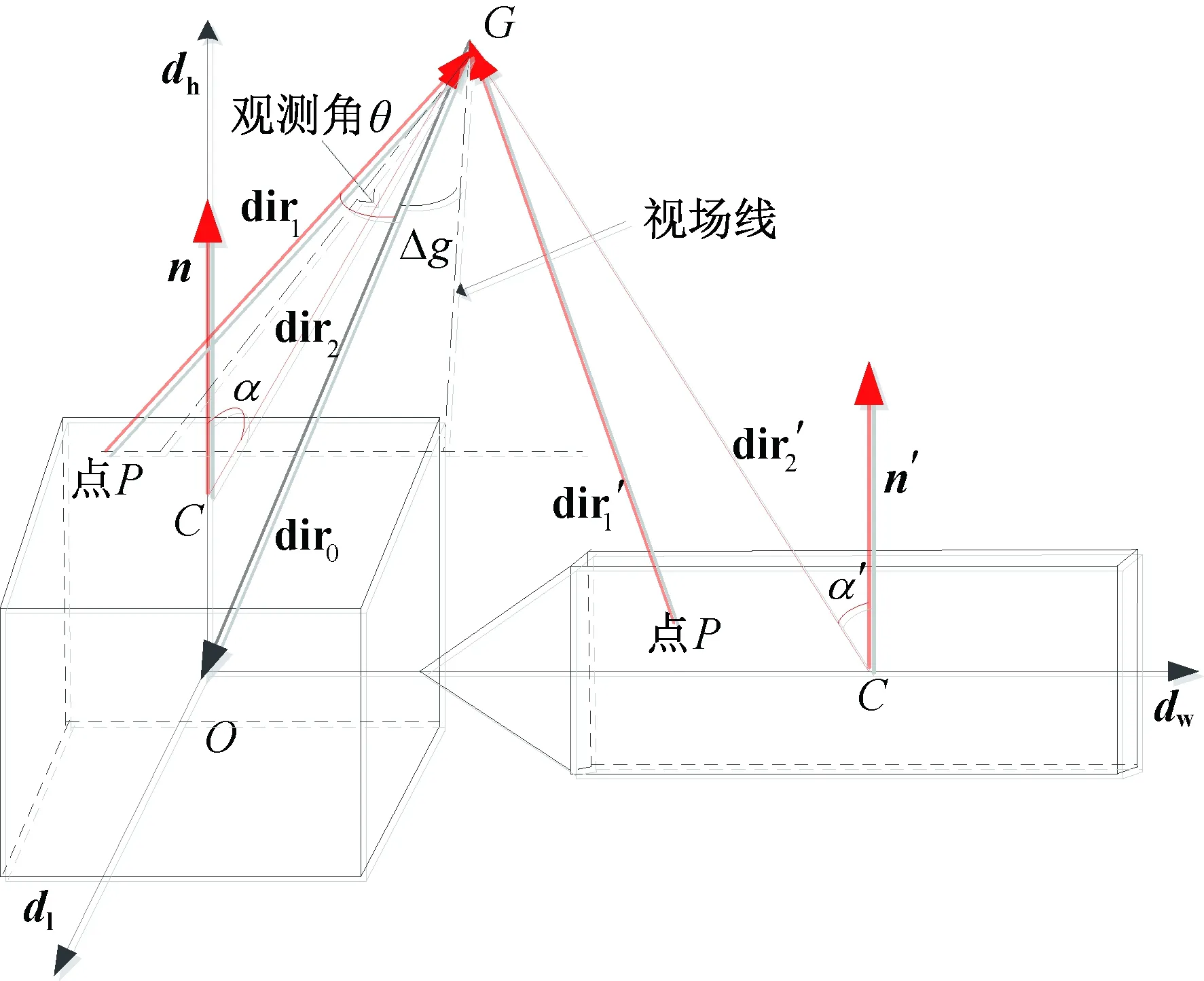
圖3 觀測點與空間目標的空間幾何關系Fig.3 Space geometric relationship between observation point and target satellite
對長方體表面成像點的可觀測性進行分析,判斷長方體的某表面是否在觀測衛星可觀測范圍內。若0≤α<π/2,則表示此表面可觀測,繼續判斷表面內部成像點能否被觀測:若θ<Δg,則表示成像點在視場內部且未被目標自身遮擋,可觀測;若θ≥Δg,則表示成像點不可觀測。
2 近距離三維詳查任務設計
觀測衛星在某一時刻只能觀測空間目標表面的一塊區域。觀測衛星對空間目標進行繞飛相對運動,其相對位置速度不斷變化,已觀測的區域逐漸增大并連成一片。如果單顆觀測衛星繞飛1圈,則只能觀測一部分區域,因此,設計不同的繞飛軌道與衛星數量,可以提高觀測覆蓋率,減少全覆蓋詳查的最短時間。
2.1 多星繞飛任務相對運動
采用VVLH(當地軌道坐標系)描述觀測衛星相對空間目標的運動,其定義為:坐標原點在觀測目標幾何中心;z′軸指向地心;x′軸沿觀測衛星軌道速度方向,處于軌道面內,與z′軸垂直;y′軸由右手法則確定。從運動學角度建立相對運動方程,一階近似簡化后,以軌道根數為參數,將繞飛相對運動描述為
(8)
式中:a,e,λ,Ω,ωc分別為半長軸、偏心率、軌道傾角、升交點赤經、近地點幅角;ωn為軌道平均角速度。
將式(8)簡化,相對空間目標的橢圓繞飛軌道運動可表示為[8]
(9)
式中:A為繞飛半徑;φ為觀測衛星在繞飛軌道上的位置;k為1個無量綱的正數,表示y軸方向上的振動幅值;φ為y軸方向上的振動相位。A,φ,k,φ與運動學參數a,e,ΔΩ,Δλ,ωc的關系為[9]

(10)
采用式(9)表示繞飛相對運動,分離了描述觀測衛星在繞飛軌道上具體位置的參數φ,并且描述繞飛軌道的其他3個參數意義明確,便于設計不同的多星繞飛軌道構型。
隨著參數A、k、φ、φ的變化,繞飛軌道的形狀和空間指向都發生了變化。觀測衛星的位置變化對觀測目標的覆蓋特性有一定的影響。如果配置多顆觀測衛星,使它們有不同的A、k、φ、φ,構成不同的繞飛編隊隊形,則覆蓋特性也不同。如果同繞飛軌道的2顆觀測衛星對非旋轉目標進行觀測,觀測區域相同,則最大覆蓋率沒有變化,但達到最大覆蓋所需觀測時間會縮短。不同軌道觀測衛星的軌跡不同,觀測條帶不同,由多顆衛星對空間目標觀測,可提高覆蓋率,縮短觀測時間,提高任務成功率。
2.2 近距離三維詳查的任務設計
2.2.1 單星觀測
單星觀測分為兩種情況:一是假設觀測衛星的觀測光軸(視線中心方向)始終指向空間目標主體中心;二是假設觀測光軸隨時間轉移,光軸在1個周期內沿y軸方向從空間目標左帆板的最左端勻速轉到右帆板的最右端。
2.2.2 3星3軌道觀測
設計位于3個軌道面的3顆觀測衛星對空間目標進行分區域觀測,3個軌道面的傾角間隔為60°,如圖4所示。圖中:觀測衛星a光軸對準空間目標左帆板的幾何中心,觀測衛星b光軸對準空間目標的幾何中心,觀測衛星c光軸對準空間目標右帆板的幾何中心。

圖4 3顆觀測衛星3軌道運動軌跡Fig.4 Movements of three observation satellites in three orbits
2.2.3 6星3軌道觀測
為滿足實時、全覆蓋觀測的要求,設計位于3個軌道面的6顆衛星進行觀測,同軌道2顆觀測衛星間隔為180°,3個軌道面傾角間隔為45°(見圖5)。圖中:2顆觀測衛星a的觀測光軸對準空間目標左帆板的幾何中心,2顆觀測衛星b的觀測光軸對準空間目標的幾何中心,2顆觀測衛星c的觀測光軸對準空間目標t右帆板的幾何中心。

圖5 6顆觀測衛星3軌道運動軌跡Fig.5 Movements of six observation satellites in three orbits
3 基于網格統計的詳查任務分析
近距離繞飛詳查的目的是獲取空間目標盡可能多的圖像信息,以構建空間目標精確的三維模型,從而支持后續的在軌操作任務。觀測衛星在某一時刻只能觀測空間目標表面的部分區域;經過一段時間觀測后,覆蓋率的計算依賴于對已觀測區域的標識;而對空間目標表面實現最大覆蓋詳查的最短時間又依賴于覆蓋率的計算。因此,需對繞飛詳查過程中的覆蓋區域進行統計。
點覆蓋數值仿真是一種統計多顆觀測衛星對觀測區域覆蓋特性的方法[10-11],其優點是考慮了各種軌道及攝動影響,缺點是計算量大。將點覆蓋數值仿真應用于在軌近距離詳查任務分析,對空間目標的表面進行網格離散,由各顆觀測衛星在不同時刻、狀態下對空間目標表面區域內的網格進行標識與統計,分析三維觀測繞飛詳查任務的覆蓋率變化。
3.1 區域網格空間劃分
根據任意區域的目標R各頂點的最小值、最大值(Xmin,Xmax,Ymin,Ymax),定義1個矩形區域,目標區域位于矩形區域的內部,將該目標區域在X,Y軸方向上分割成連續的相鄰網格,如圖6所示。

圖6 網格統計法示意圖Fig.6 Schematic diagram of grid statistics
圖6中網格組成的集合為網格空間,記為

(11)
式中:Len,Wid分別為X,Y軸方向上的網格數;i,j分別為X,Y軸方向上的網格編號;C(i,j)為單位網格。
對于長方體目標,本文將6個表面分為6個矩形區域,分別對每個區域進行網格劃分,且網格中心點的位置坐標選用空間三維坐標值表征。當網格劃分足夠精細時,可用單位網格的中心點來表征整個單位網格的觀測情況。
對于點目標,本文將其單獨構成1個不存在面積的單位網格,具體表示為
C(i,j)={N(i,j);P(i,j);S(i,j)}
(12)
式中:i≤Len;j≤Wid;N(i,j)為網格編號;P(i,j)為點坐標;S(i,j)為網格覆蓋狀態,其表達式為

(13)
3.2 基于網格統計的分析
假設目標區域內的每個網格只需被觀測1次,則當所有網格均觀測至少1次便實現了全覆蓋。對于任意網格C(i,j)∈Er且網格覆蓋狀態值S(i,j)=0,當目標區域首次被觀測時,S(i,j)變為1。每項觀測任務執行完畢后,網格空間進行更新,被觀測后S(i,j)為1的網格相當于待觀測區域“外”部分。因此,下一步觀測是對更新后未觀測的網格空間進行分析,從而避免重復統計,提高觀測計算效率。
基于上述規則,將已觀測的目標區域覆蓋率表示為
R=E/V
(14)
式中:V為目標區域內劃分網格點的總數,V=Len×Wid;E為目標區域內覆蓋狀態為1的網格點數量。
在相對坐標系下,對空間目標表面進行區域網格劃分預處理,以觀測衛星運動狀態為觀測基點,對空間目標表面進行判斷,統計覆蓋特性。具體流程如圖7所示。
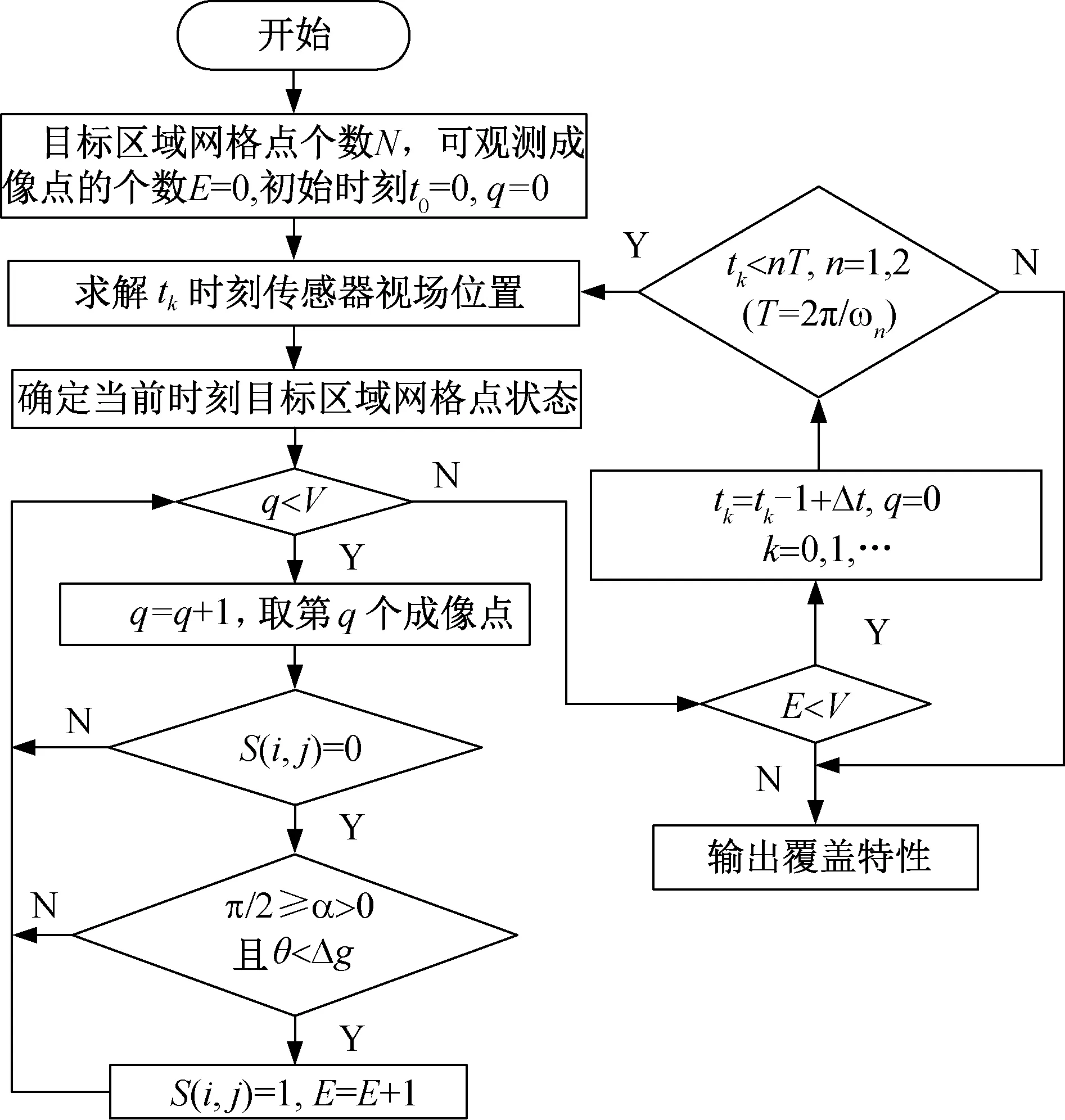
圖7 覆蓋特性計算流程Fig.7 Calculation flowchart of coverage characteristics
3.3 近距離三維詳查任務分析
根據2.2節中設計的觀測任務,通過實施不同觀測策略對簡化的空間目標進行詳查,統計觀測結果,分析最大覆蓋率、最大覆蓋時的最短繞飛時間等覆蓋特性。
當觀測衛星對空間目標主體(非旋轉目標)觀測時,隨著繞飛距離的增大,觀測視場變大,可觀測區域放大;同時,可觀測部分在1個繞飛周期后重復。對于不同繞飛距離,計算繞飛1個周期內的最大覆蓋率;對統計過程中覆蓋率達到1的情況,計算達到最大覆蓋的最短繞飛時間。
當觀測衛星對空間目標太陽帆板(旋轉目標)觀測時,可觀測部分隨時間變化,如果可對旋轉目標全覆蓋觀測,則計算最大觀測的最短繞飛時間;如果不能對旋轉目標全覆蓋觀測,則計算繞飛2個周期時的最大覆蓋率。
4 算例分析
4.1 參數設置
空間目標主體和太陽能帆板的尺寸見表1。在相對坐標系下,單顆觀測衛星的初始位置參數為:繞飛半徑A=1 m,k=1.5,φ=0°,φ=0°,ωn=9.918×10-4rad/s,繞飛周期T=6 335 s,星載遙感器視場半錐角Δg=5°。當A以0.5 m的步長從1 m增加到20 m時,分析覆蓋率R及最大覆蓋時的最短繞飛時間tk的變化規律。

表1 模擬空間目標尺寸
4.2 仿真結果
4.2.1 單衛星觀測
單顆觀測衛星觀測時繞飛距離與覆蓋特性的關系如圖8所示。圖8(a)為觀測光軸固定的情況,由圖可見:隨著繞飛半徑的增大,覆蓋率呈近直線增加,直到全覆蓋(覆蓋率為1),之后覆蓋率不變;最大覆蓋最短繞飛時間隨著繞飛半徑距離的增大而減小,繞飛半徑達到一定距離后,最大覆蓋的最短繞飛時間不再變化。圖8(b)為光軸勻速轉動的情況,達到最大覆蓋的最短繞飛時間更短,最小繞飛半徑更小。考慮到觀測光軸固定,太陽帆板靜止不動情況,實現全覆蓋觀測的繞飛半徑需大于24.5 m,約為旋轉太陽帆板剛達到全覆蓋時繞飛半徑的2倍,且其最大覆蓋時的最短繞飛時間約為旋轉太陽帆板的3倍,綜合空間內實際的工作衛星,本文主要分析太陽帆板旋轉條件下的觀測情況。
4.2.2 3軌道3衛星觀測
3軌道3顆觀測衛星的觀測分析結果如圖9所示。由圖可見:多顆衛星觀測時覆蓋率明顯提高,最大覆蓋的最短繞飛時間縮短。對空間目標主體最大覆蓋時的最短繞飛時間從繞飛半徑大于5 m后幾乎不變,對空間目標太陽帆板最大覆蓋時的最短時間從繞飛半徑大于10 m后保持不變。分析空間目標主體、太陽帆板的特點,瞬時狀態下單顆衛星單獨觀測不能全覆蓋觀測目標,空間目標主體的結構原因導致單顆衛星觀測長方體需要有一定的最短繞飛時間,空間目標太陽帆板的最短繞飛時間很短是由于帆板很薄且帆板自身的轉動加快了觀測衛星的實際相對角速度。

圖8 單星繞飛距離與覆蓋特性的關系Fig.8 Relationship between fly-around distance and coverage characteristics of single observation satellite

圖9 3星繞飛距離與覆蓋特性的關系Fig.9 Relationship between fly-around distance and coverage characteristics of three observation satellites
4.2.3 3軌道6衛星觀測
3軌道6顆衛星的觀測分析結果如圖10所示。由圖可見:當繞飛距離大于10 m時,衛星可在某時刻達到全覆蓋觀測,實現全方位、實時觀測。實際任務中,繞飛半徑小有利于獲得高分辨率圖像,但目標本身具有一定尺寸,繞飛半徑小過小容易造成碰撞事故,因此需根據實際情況確定繞飛半徑。

圖10 6星繞飛距離與覆蓋特性的關系Fig.10 Relationship between fly-around distance and coverage characteristics of six observation satellites
4.3 比較分析
由圖8(b)可見:當單顆觀測衛星光軸轉動觀測太陽帆板結構時,在觀測衛星繞飛半徑大于6 m后實現對目標的全覆蓋觀測。由圖9可見:多顆觀測衛星同時觀測目標主體,當觀測衛星繞飛半徑大于3 m時,可實現對空間目標的全覆蓋觀測;由圖10可見:當觀測衛星繞飛半徑大于4.5 m時,可實現瞬時全覆蓋觀測。
本文將目標結構、衛星資源、安全性等條件,與實時、全覆蓋觀測的任務要求相結合,減少觀測衛星數量以節約資源。空間目標主體為長方體結構,功能多樣。為滿足實時全方位覆蓋的任務要求,應配置至少由3顆觀測衛星進行實時觀測,繞飛半徑至少為8 m。由于空間目標的太陽能帆板結構簡單,設計1顆繞飛半徑為10 m的觀測衛星b對其進行觀測,觀測光軸隨時間變化而轉動,且1個周期內沿y軸從空間目標左帆板的最左端勻速轉移到右帆板的最右端。
仿真驗證本文所設計的4顆衛星、4個軌道面的編隊(見圖11),可使空間目標主體在某時刻被全覆蓋觀測,且滿足空間目標太陽能帆板在1個周期內被全覆蓋觀測的任務要求。

圖11 4軌道4顆觀測衛星運動軌跡Fig.11 Movements of four observation satellites in four orbits
5 結束語
本文采用網格點仿真方法,對多顆觀測衛星近距離詳查空間目標的任務進行設計和分析,結果表明:最大覆蓋的最短繞飛時間隨著繞飛距離增大呈階段性減小;采用觀測光軸轉動策略與多顆觀測衛星編隊觀測策略均可實現全覆蓋觀測。在相同繞飛半徑條件下,多顆衛星編隊協同觀測的任務特性明顯優于單顆衛星單獨觀測,因此,設計合理的編隊構型,如4顆衛星4個軌道面的繞飛編隊構型,可獲得詳細完整的目標信息,實現全方位、實時觀測,既可節約資源,又能提升經濟效益,提高任務成功率。
本文假設空間目標為簡單的長方體與平面板結構相結合,但實際空間目標主體的構型更為復雜,需考慮目標整體形貌,以及帆板、桿系、噴管、天線等局部特征的識別等,因此將對更復雜構型空間目標的三維詳查任務進行研究。本文假設觀測衛星為質點,實際情況下如果觀測衛星繞飛半徑太小,存在觀測衛星與空間目標、觀測衛星與觀測衛星之間碰撞的風險,因此將深入研究多顆觀測衛星近距離操作碰撞規避的問題。