多層穿梭車作業(yè)系統(tǒng)配置
2018-09-13 01:28:46
物流技術 2018年8期
(同濟大學 機械與能源工程學院,上海 201800)
1 引言
多層穿梭車系統(tǒng)(Shuttle Based System/Retrieval System簡稱SBS/RS)由貨架、巷道穿梭車、提升機、揀貨臺、塑料裝載箱、掃碼器、輸送設備等組成,其中穿梭車與提升機的性能與配置在整個系統(tǒng)中起到關鍵作用。眾多學者對多層穿梭車系統(tǒng)進行了研究,如,Lerther,T[1]等研究表明多層穿梭車系統(tǒng)運行的瓶頸在于穿梭車與提升機的效率不匹配,設備冗余空閑等待時間較長。陳國真[2]對多層穿梭車系統(tǒng)的作業(yè)模式進行了分析,并研究了穿梭車跨層作業(yè)系統(tǒng)配置。牟善棟[3]對多層穿梭車系統(tǒng)任務調度進行了研究,建立開環(huán)排隊網(wǎng)絡模型分析多層穿梭車倉儲系統(tǒng)。李詩珍[4]研究了ABC分類存儲對倉儲揀選路徑的影響,根據(jù)分類存儲原則,85%貨量將存儲在離出入庫口較近的地方。
2 系統(tǒng)作業(yè)描述
配送中心的主要日常作業(yè)包括收貨、入庫、盤點、出庫、包裝、配送、退貨及殘損品管理以及維護,隨著物流行業(yè)對于倉儲配送的柔性和魯棒性要求的提高,一種新型的自動化立體倉庫—多層穿梭車倉儲系統(tǒng)逐漸得到重視和應用。多層穿梭車倉儲系統(tǒng)是由多層貨架內的穿梭車與該巷道的提升機組成,出入庫作業(yè)時用穿梭車與提升機的組合來替代傳統(tǒng)自動化立體倉庫中的堆垛機,提高了系統(tǒng)的柔性和魯棒性[3]。多層穿梭車系統(tǒng)的出庫作業(yè)是穿梭車的并行作業(yè)和提升機的串行出庫。在實際作業(yè)環(huán)境中,多層穿梭車系統(tǒng)貨架高度一般在20m以上,大小取決于系統(tǒng)吞吐量。提升機有一個或兩個立柱支撐,貨物由升降臺裝載,沿垂直方向運動。巷道穿梭車負責水平方向運動,把貨物運送到巷道對應層的出入庫I/O口處,每個巷道都有一臺穿梭車負責該巷道存取作業(yè)。每層巷道的I/O口在貨架的首端,銜接穿梭車和提升機的運輸作業(yè)。
以出庫為例,穿梭車接收到出庫某貨位貨物的任務后,自動運行到該貨位,由該穿梭車完成貨物從貨位處到縱向提升機之間的水平運動,由貨物提升機完成貨物的垂直方向運動。這一系列由巷道穿梭車、移載穿梭車、貨物提升機的組合運動,完成了傳統(tǒng)的堆垛機的出入庫作業(yè),由于穿梭車和提升機的分工明確,運動快速、高效,從而其出庫效率遠高于堆垛機。
出庫任務到達時,倉儲管理系統(tǒng)確定出庫料箱的存儲位置,存儲位置可以由貨位的三維位置唯一確定,再由對應巷道的穿梭車運輸?shù)皆搶酉锏繧/O口,然后由對應的提升機將料箱取到一層I/O口,再由穿梭車或者輸送設備輸送到揀貨臺,由揀貨員進行揀貨作業(yè)。
自動化立體倉庫系統(tǒng)揀選模式分為兩種,一種是單指令作業(yè),即一次只接受一個作業(yè)任務,另一種是雙指令作業(yè),即一次接受出庫和入庫兩種作業(yè)任務。
在單指令循環(huán)中,提升機接收指令從出入庫平臺I/O口出發(fā),運動至作業(yè)所在層的出入庫緩沖區(qū)(由穿梭車將貨格搬運至緩沖區(qū)),揀選貨物后,原路返回至出入庫平臺I/O口。下圖1所示,作業(yè)時間為:

在雙指令循環(huán)中,提升機接收指令從出入庫平臺I/O口出發(fā),運動至入庫所在層的出入庫緩沖區(qū),放下貨物后,運動至出庫所在層的出入庫緩沖區(qū),揀選貨物后返回至出入庫平臺I/O口。如圖2所示,作業(yè)時間為:

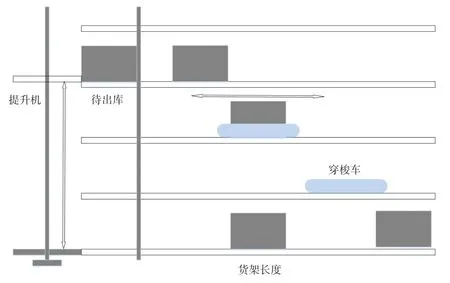
圖1 單指令循環(huán)提升機作業(yè)示意圖
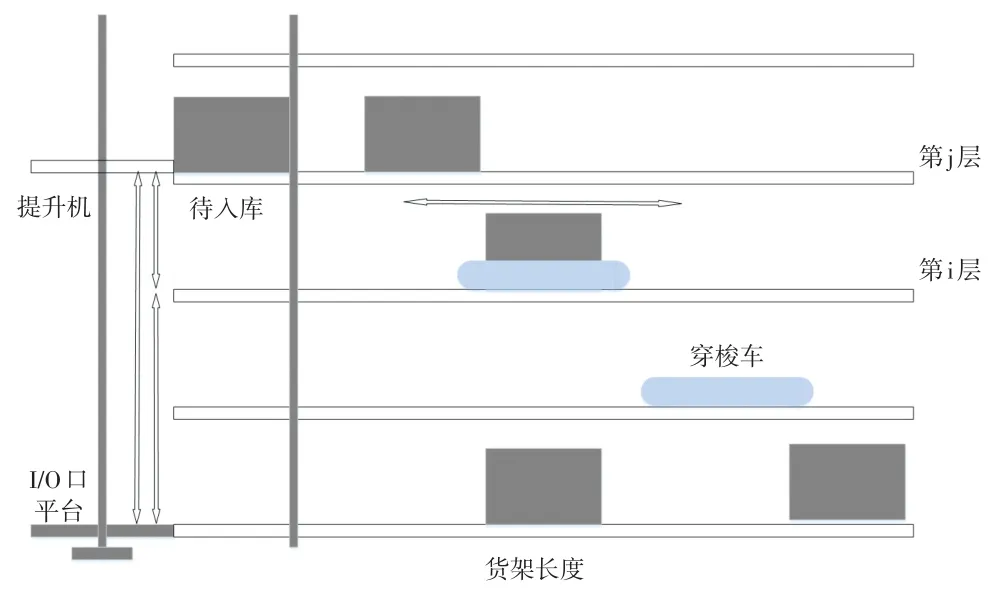
圖2 雙指令循環(huán)提升機作業(yè)示意圖
3 穿梭車、提升機運動學建模
3.1 符號說明
本文建模所用符號含義見表1。
3.2 模型假設
(1)貨架被一個巷道分割成兩部分,假設在中間行走的穿梭車可以任意取到所需貨物;
(2)輸入輸出(I/O)口置于倉庫底層,緊靠提升機的位置;
(3)假設貨物訂單隨機分布,存儲策略為ABC分類存儲;
(4)假設作業(yè)期間設備無卡頓、故障。
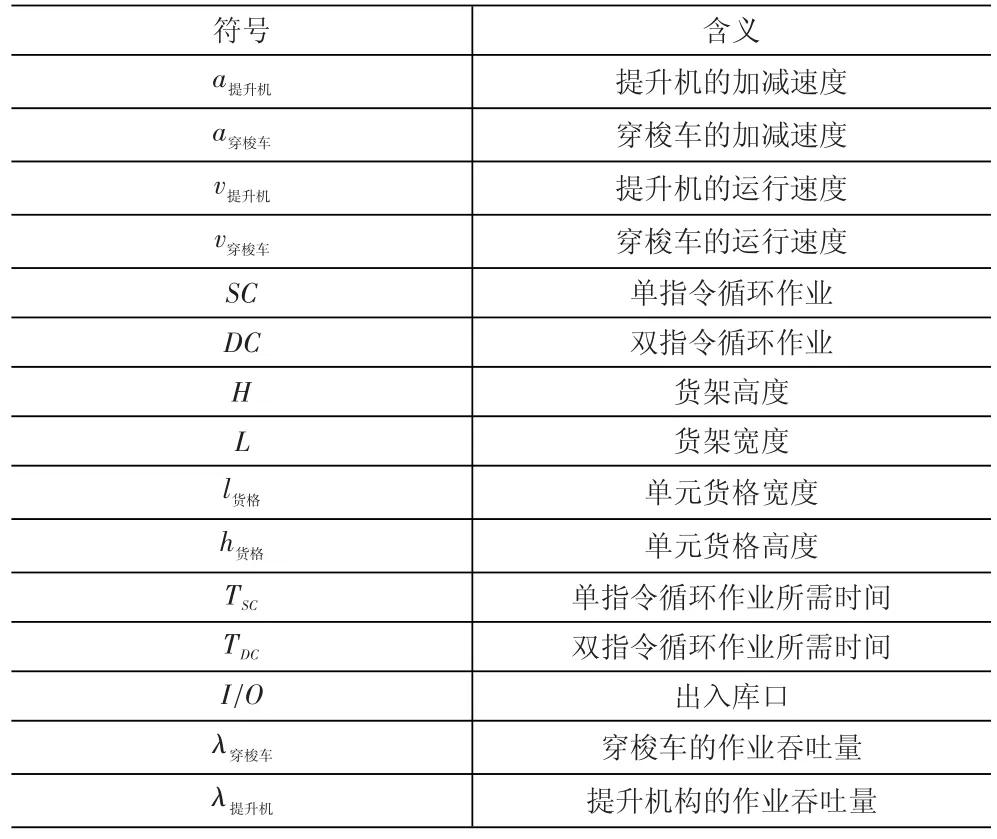
表1 符號說明
3.3 多層穿梭車系統(tǒng)設備運動特性
SBS/RS系統(tǒng)仿真模型的研究基于倉庫尺寸(層數(shù)T、列數(shù)C、巷道數(shù)A),以及提升機構和穿梭小車運行速度等參數(shù),進而分析其系統(tǒng)運行過程。
提升機和穿梭車的運行速度有兩種情況,第一種是恒加速、恒減速運動,第二種是恒加速、勻速、恒減速運動。速度與加速度公式如下所示[5]:
對于類型I:
類型I中提升機(穿梭車)恒加速與恒減速時間相同,因此達到最大速度值所花費的時間為總時間的一半。
速度隨時間變化的函數(shù)表達式為:

距離隨時間變化的函數(shù)表達式為:
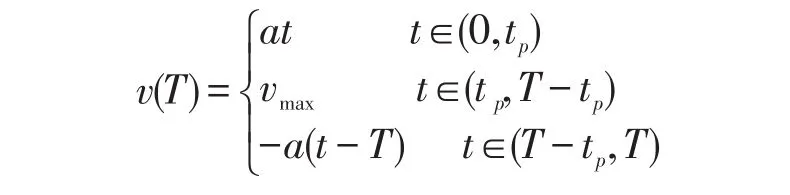
對于類型II:
類型II中提升機(穿梭車)先恒加速再勻速最后恒減速運動。
速度隨時間變化的函數(shù)表達式為:
距離隨時間變化的函數(shù)表達式為:
4 多層穿梭車系統(tǒng)仿真模型
4.1 穿梭車作業(yè)分析
穿梭車單指令作業(yè)循環(huán)是指貨物經(jīng)過I/O口進入緩沖區(qū)后,由提升機將其運送到相應的存儲層i,穿梭車取出存儲貨物的料箱,并直接將其運送至相應的存儲位置,當前作業(yè)結束,如圖3所示。作業(yè)時間為:

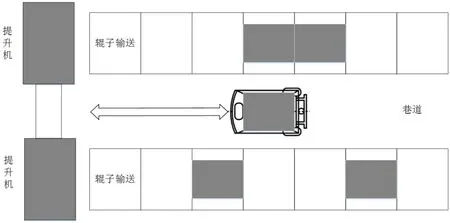
圖3 單指令循環(huán)穿梭車作業(yè)示意圖
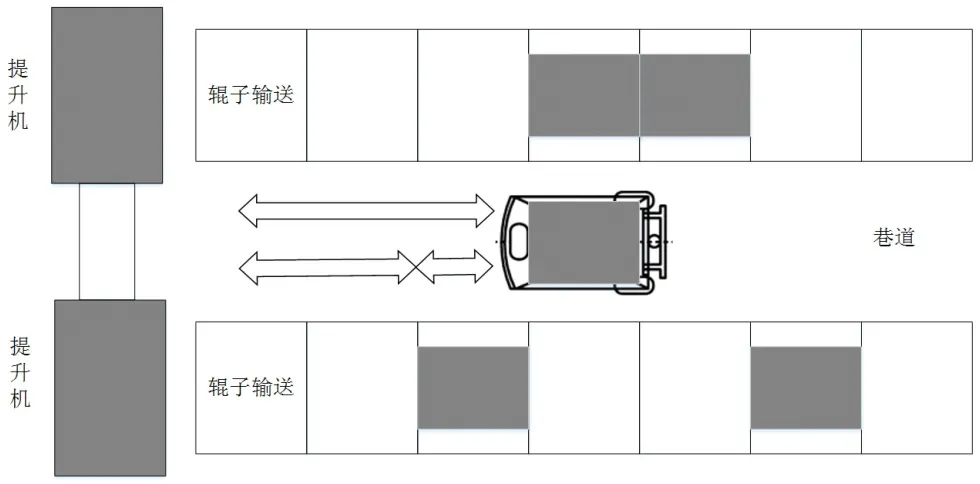
圖4 雙指令循環(huán)穿梭車作業(yè)示意圖
穿梭車雙指令作業(yè)循環(huán)是指貨物經(jīng)過I/O口進入緩沖區(qū)后,由提升機將其運送到相應的存儲層i,穿梭車取出存儲貨物的料箱,并將其運送至相應的存儲位置,提升機不直接返回I/O口,而是繼續(xù)前往下一個需要出庫的貨位層進行取貨操作,即從第i層作業(yè)結束后,提升機運動至需要進行出庫操作的第 j層,對應層的穿梭車將所需貨物取出運行至在第 j層等待的提升機,提升機收到貨物后將其運送至出入庫I/O口,當前作業(yè)結束,如圖4所示。作業(yè)時間為:

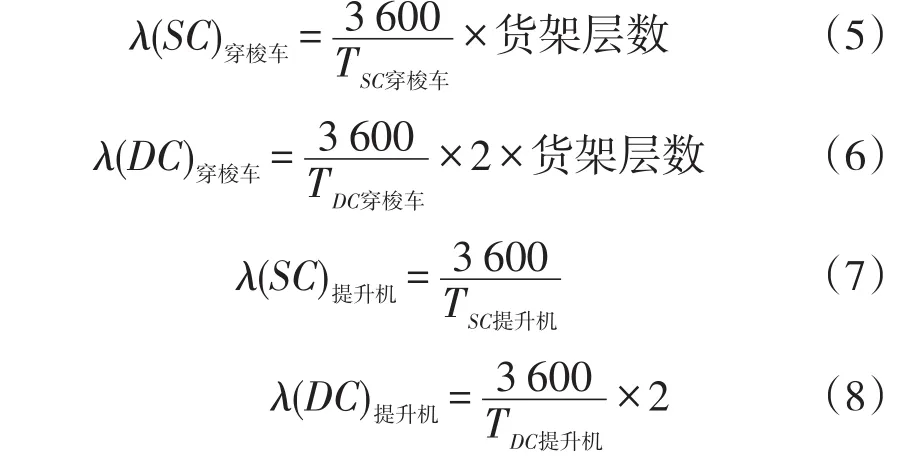
巷道內每層均安排一臺穿梭車,故穿梭車的貨物吞吐量計算需要乘以貨架層數(shù);而雙指令循環(huán)每次揀選兩件貨物,故貨物吞吐量計算需要乘2,計算公式為:
整個系統(tǒng)作業(yè)算法流程圖如圖5所示。
4.2 仿真計算
將ABC存儲策略簡化為,越靠近倉庫出入口位置的貨物被揀選的概率越大,越遠離出入口位置的貨物被揀選的概率越小。問題轉化為在隨機訂單的生成中,靠近倉庫出入口的貨物品項的生成概率與遠離倉庫出入口貨物品項生成概率不等的一種不等概率隨機數(shù)問題。假設每層貨格編號0至n,讓產(chǎn)生各個數(shù)字的概率等差遞減,貨格1被產(chǎn)生的概率最大,往后依次減小,即各個隨機數(shù)的概率之比為“n+1∶n∶n-1∶…∶1”。首先要構造一個區(qū)間,區(qū)間的下限為0,上限為各個比率數(shù)字之和,也就是(n+1)+n+(n-1)+(n-2)+…+1。首先把這個大區(qū)間劃分為n+1個長度不等的小區(qū)間,每個小區(qū)間的跨度和各個數(shù)字的產(chǎn)生概率對應,也就是[0,n](跨度為n+1),[n+1,2n](跨度為n),以此類推,這些小區(qū)間就代表了各個數(shù)字產(chǎn)生的概率。
以表2、表3參數(shù)為例,采用java語言在eclipse平臺上編程實現(xiàn),得到穿梭車、提升機的單次搬運工作時間。
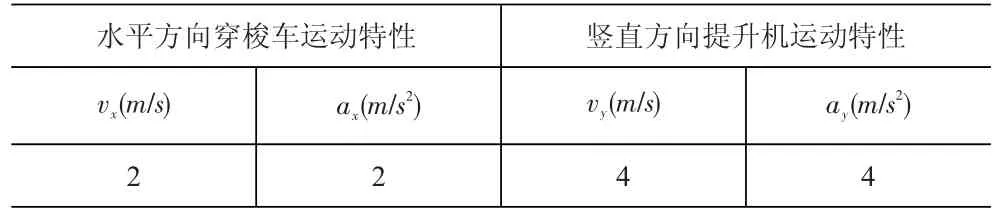
表2 穿梭車、提升機運動特性
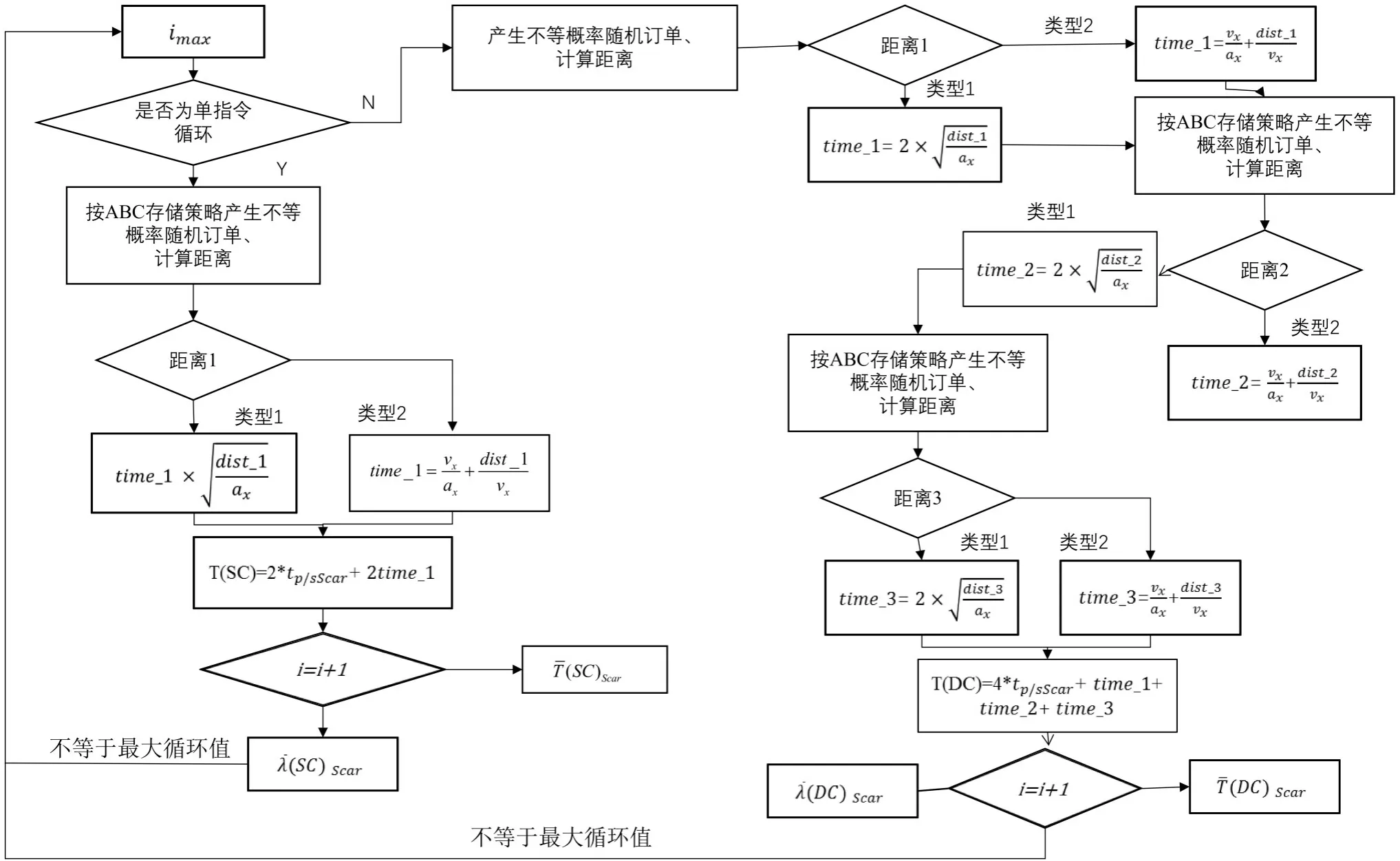
圖5 單指令循環(huán)、雙指令循環(huán)穿梭車工作時間與貨物吞吐量
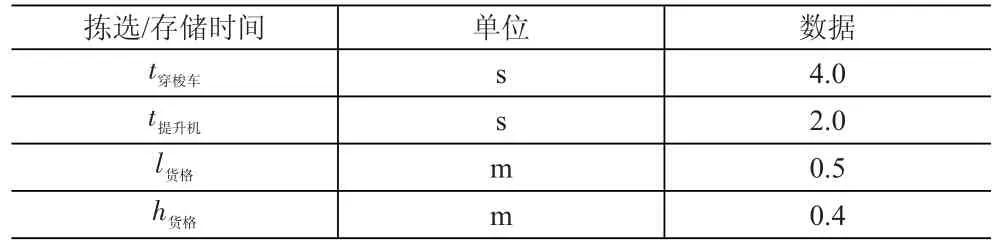
表3 穿梭車、提升機單次揀選動作時間
貨架長25m,高16m時得到的設備單次作業(yè)運行時間見表4。
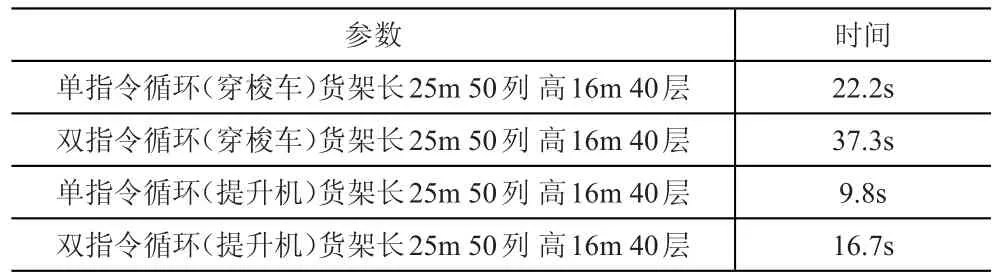
表4 某一貨架參數(shù)下的設備工作時間
根據(jù)調整不同貨架縱深下設備的工作時間,通過Matlab進行數(shù)據(jù)擬合,計算得到穿梭車與提升機效率能夠匹配的最佳倉庫貨架參數(shù),如圖6—圖9所示:
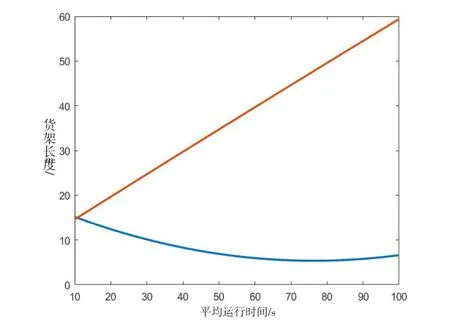
圖6 單指令循環(huán)穿梭車與提升機單次作業(yè)平均運行時間
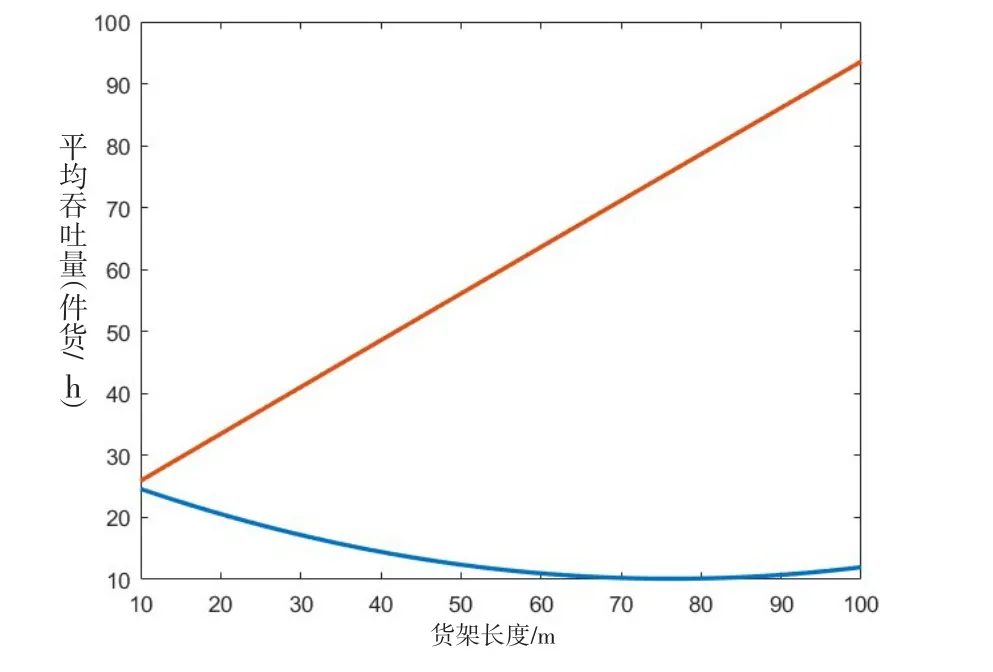
圖7 雙指令循環(huán)穿梭車與提升機單次作業(yè)平均運行時間
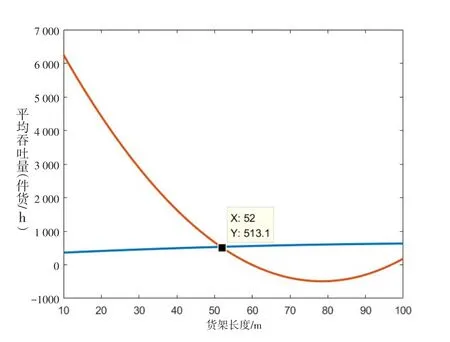
圖8 單指令循環(huán)作業(yè)穿梭車與提升機貨物吞吐量
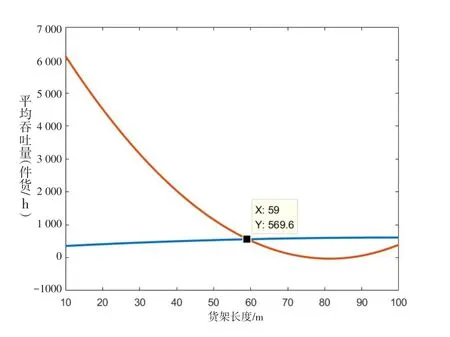
圖9 雙指令循環(huán)作業(yè)穿梭車與提升機貨物吞吐量
5 結論
從圖6、圖7可以看出,隨著貨架縱深長度的增加,單指令循環(huán)和雙指令循環(huán)中,穿梭車的單次平均作業(yè)時間均比提升機單次平均作業(yè)時間長。
每個巷道的每層都配備一臺穿梭車,而提升機只有一臺,因此系統(tǒng)作業(yè)時,提升機滿負荷運轉,穿梭車則出現(xiàn)等待空閑。
從圖8、圖9擬合結果可以看出,在單元貨格長度為0.5m,高度為0.4m。穿梭車運行速度2m/s,加速度2m/s2,單次揀選作業(yè)時間為4s;提升機運行速度4m/s,加速度4m/s2,單次揀選作業(yè)時間為2s的條件下,單指令循環(huán)貨架縱深長度為52m時,雙指令循環(huán)貨架縱深長度為59m時,穿梭車與提升機吞吐量相等,效率匹配,系統(tǒng)冗余少。
猜你喜歡
工業(yè)設計(2022年8期)2022-09-09 07:43:20
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
軍民兩用技術與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
學生天地(2020年17期)2020-08-25 09:28:54
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
故事大王(2016年7期)2016-09-22 17:30:08