視覺物聯網下智能養老監控系統信號控制技術
2018-09-19 09:40:34丁亞飛王啟明王飛飛
計算機測量與控制 2018年9期
丁亞飛,王啟明,王飛飛
(平頂山學院,信息工程學院,河南平頂山 467000)
0 引言
視覺物聯網包含網絡的感知功能,可利用不同影像來獲取傳感器中的數據,其中包括監控攝像機中的數據、手機中的數據、數碼相機中的數據等。一旦獲取人、物等圖像或視頻中的視覺數據,需直接提取視覺標簽,采用智能分析方法對視覺物聯網下收集到的信息進行處理,為后續研究提供支持[1]。在最近幾年全球人口普查過程中發現,我國老年人口以每年3%的速度快速增長,養老機構的老年人占90%,為了保證老人生命安全,設置智能養老監控系統是具有必要性的[2]。
研究智能養老監控系統信號控制技術,在信號檢測和測控等方面具有廣闊應用前景。采用傳統方法設計的智能養老監控系統信號控制技術受到存在控制效果差的問題,不適用于現場監測的應用需求,在該系統中經常出現其它信號干擾的問題,影響了監控系統控制實效性,導致對信號的稀疏程度無法進行有效控制[3]。為此,提出了視覺物聯網下智能養老監控系統信號控制技術。視覺物聯網是通過視覺傳感器和信息傳輸來智能區分人和物的,按照實際需求,將任何拍攝到的信息與智能物聯網相連接,實現信息的交換,進而完成對信號的跟蹤、定位與控制。
1 監控系統信號控制技術研究
傳統智能養老監控系統信號控制技術采用紅外線掃描方式,對養老院的人或物進行區分,進而實現對信號的控制。該技術容易受到外界信號的干擾,導致控制效果變差[4]。因此,提出了自適應聯合濾波控制方式,融合濾波控制算法,由視覺系統估計值來進行定位控制。具體流程如圖1所示。
由圖1可知:經過采集器采集到的信號傳遞到數據轉換器中,利用轉換器完成信號向數據的轉換,方便后續研究。將轉換后的數據傳遞給處理器中,進行初始化處理,該部分的數據具有實效性和精準性,為此,對該數據進行融合計算,確定信號位置,由此完成對信號的控制[5]。
1.1 基于視覺物聯網的信號分發
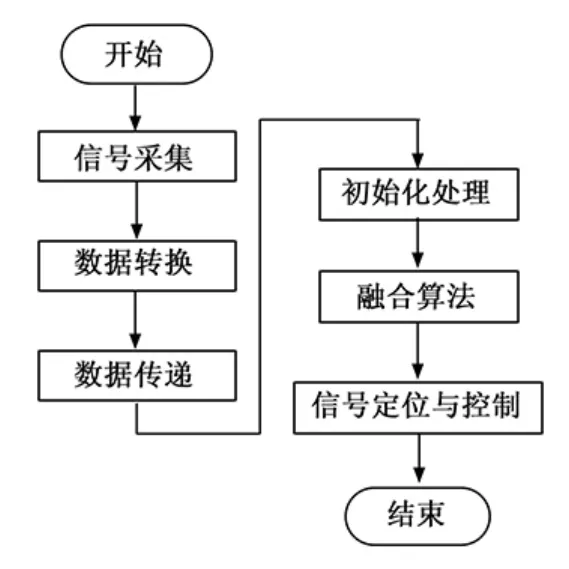
圖1 信號控制流程
在視覺物聯網環境下采集的信號是建立在各個采集節點環境變化基礎上實現的,當采集時間為T1時,采集節點是以周期C變化形勢來預測 [T1,T1+C]時間段內信號密度的,通過分析信號密度來獲取視覺物聯網下的信號實時變化情況。根據采集節點密度來估計數據分發結果,沿著當前網絡出現的信號干擾,計算信號傳遞的時間,其中記錄途徑各個節點受到的傳輸延遲時間,進而選擇一條最短路徑,達到有效控制的目的[6]。針對信號分發具體過程如下所示:
1)監控使用者應先注冊用戶名,并登錄管理平臺,根據管理者搜索的關鍵字來查看相應監控影視文件;
2)管理者在客戶端打開影視文件,需通過超文本傳輸協議來連接信號追蹤器,此時的管理者需通過計算機向服務器發送請求,進而獲得影像文件表;
3)在客戶端獲取影像文件表,利用采集到的節點信息,實現信號連續分發;
4)管理者向追蹤器發送已經分發的信號信息,此時的系統自行更新影像文件表,進而完善各個影像文件表分發信息;
5)當客戶端完成信號分發后,需在物聯網環境下停留一段時間,否則將會給系統造成嚴重破壞,利用信號分發控制機制,對節點進行嘗試性連接,可有效防止系統功能衰竭[7]。
在跟蹤服務器中添加信號分發控制,可統計管理者信號傳輸的總量,分發信號量較多的管理者,將被賦予最高權限;反之,分發信號量較少的管理者,將被賦予較低權限;而對于不分發的管理者,將無權限,也就不具有信號控制資格[8]。該分發機制為信號定位與控制奠定了基礎,充分保證信號分發控制系統的實效性。
1.2 自適應聯合濾波信號定位
采用自適應聯合濾波信號定位方法,可有效改善傳統技術受到其它信號干擾的影響,自動推算定位遞增累計的信號傳遞方向,通過對采集的影像進行處理,可得到信號傳遞的方向偏差αn,通過影像編碼器可獲取信號傳遞的距離Sn。自適應聯合濾波信號定位方法如圖2所示。
由圖2可知:(a0,b0)是時間為tn時信號發射的初始位置[9]。
當時間為tn時,信號所在位置(ai,bi)為:
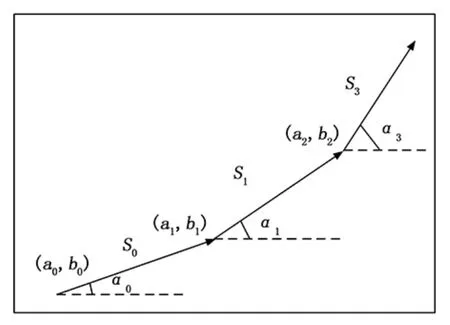
圖2 自適應聯合濾波信號定位方法

根據上述計算方法,在每一個采樣周期內,如果信號位置估算取決于上一個周期,那么覆蓋以前周期有關的誤差就會變得異常困難,因此,應對信號定位所產生的誤差進行適當補償,保證信號定位的有效性,為信號控制技術的實現奠定基礎[10]。
1.3 養老監控系統信號控制技術的實現
綜合上述研究的信號定位機制來實現養老監控系統信號的控制,該部分的實現過程如3圖所示。
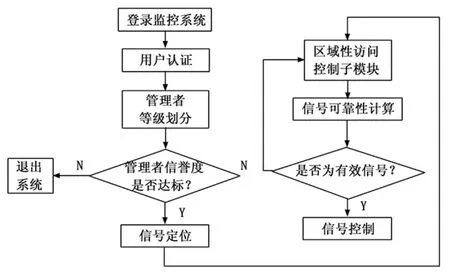
圖3 養老監控系統信號控制實現過程
由圖3可知:需先登錄監控系統,完成對用戶的認證,根據獲取的權限,對管理者劃分等級。只有滿足閾值范圍內的管理者,才可對信號進行直接定位;如果不滿足閾值范圍內的管理者,則被強制退出。區域性訪問控制子模塊,計算該區域監控影像文件的信譽度,如若滿足要求,則對其產生的信號進行監控[11]。
當管理者登錄系統后,系統會賦予管理者新的權限和角色,主要用于對監控影像的查看,而系統內部自動傳達查看命令。監控系統會自動判斷信號是否滿足控制監控影像信號范圍,如若滿足,則該管理者具有查看監控影像的權力。在管理者查詢影像的過程中,系統需同時監控管理者行為和可信度,其中管理者行為是所有監控子模塊中最重要的行為。在對信號控制過程中,該行為會判斷出信號的有效性和無效性,如果為有效性,則可直接對其進行控制;如果為無效性,則需強制管理者停止控制,并重啟監控系統,由此實現對視覺物聯網下智能養老監控系統信號的控制。
2 驗證分析
設計實驗驗證分析視覺物聯網下智能養老監控系統信號控制技術的可靠性,并根據實驗內容得出實驗結論。
2.1 實驗條件設置
2.1.1 實驗環境
采用C語言作為實驗開發語言,構建面向物聯網環境下的安全訪問機制實驗環境,將Web作為主要服務裝置,SQL數據庫作為實驗數據庫,從該數據庫中直接選取實驗數據,保證實驗數據的不間斷性。將密鑰安置在服務程序之中,使每一臺主機都有四個內核處理器和16GB的內存,通過千兆以太網實現主機之間的連接。
2.1.2 實驗參數
利用C語言實現智能養老監控系統信號控制技術的研究,設計實驗來驗證該技術的可靠性,為此,需設計實驗參數,如表1所示。

表1 實驗參數
該實驗配置包括5臺相同配置的監控,在其中一臺上安裝信號管理平臺,該平臺包括共享分發控制功能和信號追蹤功能,在剩下的4臺監控中分別配置信號虛擬發射機和接收機,總共8臺虛擬發射機和接收機作為下載節點,與種子資源共同構成信息資源分發環境。
2.2 實驗結果與分析
為了驗證該技術應用的可靠性,將傳統技術與視覺物聯網下的控制技術分別在同頻干擾、互調干擾、雜散干擾和鄰道干擾下,對智能養老監控系統信號控制效果進行對比分析。
2.2.1 同頻干擾
同頻干擾指的是不同監控器拍攝的覆蓋重疊部分,其場強是分別來自各個監控器中信號的場強之和,受到信號傳播途徑、傳播介質和發射設備的不同,導致各個監控器所發出的信號與理論上發出信號的時間不一致。說明各個信號之間存在時延誤差,進而產生各個信號的相對相位差。正是由于相位差的存在,使得各個重疊區域的信號受到同頻干擾,直接影響系統正常監控。采用視覺物聯網下的控制技術不會受到同頻干擾,而傳統技術會受到同頻干擾影響,導致控制效果較差,為了驗證該點,將兩種技術進行對比,結果如圖4所示。
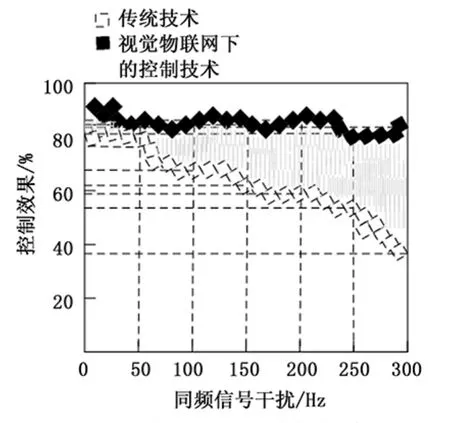
圖4 同頻干擾下兩種技術控制效果對比
由圖4可知:兩種技術最初控制效果都大于等于80%,隨著同頻信號的干擾逐漸下降。當同頻干擾信號強度為50 Hz時,傳統技術控制效果為79%,視覺物聯網下控制技術的控制效果為83%;當同頻干擾信號強度為100 Hz時,傳統技術控制效果為70%,視覺物聯網下控制技術的控制效果為82%;當同頻干擾信號強度為150 Hz時,傳統技術控制效果為60%,視覺物聯網下控制技術的控制效果為81%;當同頻干擾信號強度為200Hz時,傳統技術控制效果為60%,視覺物聯網下控制技術的控制效果為90%;當同頻干擾信號強度為250 Hz時,傳統技術控制效果為55%,視覺物聯網下控制技術的控制效果為80%;當同頻干擾信號強度為300 Hz時,傳統技術控制效果為40%,視覺物聯網下控制技術的控制效果為82%。由對比結果可知,在同頻干擾下,采用視覺物聯網下控制技術比傳統技術對信號的控制效果要好。
2.2.2 互調干擾
互調干擾指的是受到其它設備產生的頻率干擾,使射頻信號在某臺發射機中產生了新的頻率特性,該具有非線性屬性。采用視覺物聯網下的控制技術不會受到互調干擾,而傳統技術會受到互調干擾影響,使控制效果較差,為了驗證該點,將兩種技術進行對比,結果如圖5所示。
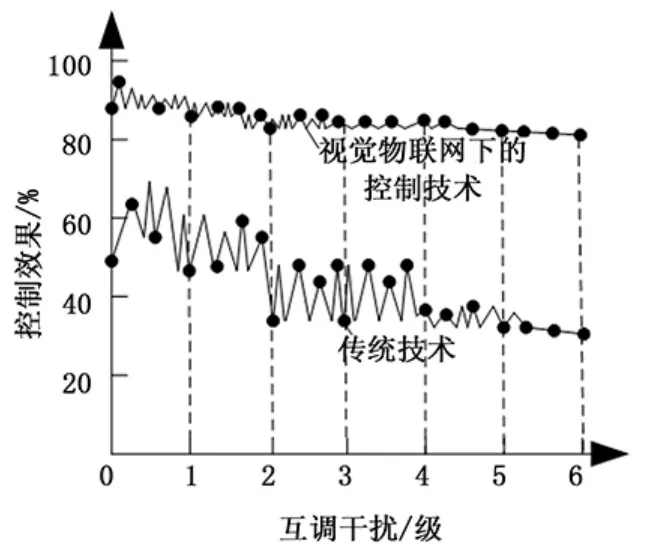
圖5 互調干擾下兩種技術控制效果對比
通過圖5所示的對比結果可知:當互調干擾等級為1時,采用傳統技術控制效果為50%,而采用視覺物聯網下控制技術的控制效果為90%;當互調干擾等級為2時,采用傳統技術控制效果為38%,而采用視覺物聯網下控制技術的控制效果為82%;當互調干擾等級為3時,采用傳統技術控制效果為37%,而采用視覺物聯網下控制技術的控制效果為81%;當互調干擾等級為4時,采用傳統技術控制效果為36%,而采用視覺物聯網下控制技術的控制效果為81%;當互調干擾等級為5時,采用傳統技術控制效果為35%,而采用視覺物聯網下控制技術的控制效果為80%;當互調干擾等級為6時,采用傳統技術控制效果為30%,而采用視覺物聯網下控制技術的控制效果為80%。由對比結果可知,在互調干擾下,采用視覺物聯網下控制技術比傳統技術對信號的控制效果要好。
2.2.3 雜散干擾
雜散干擾指的是由于發射機頻率器的濾波特性較差,使發射機的二次和三次諧波分量出現了雜波輻射信號。若發射機裝置指標不合理,則會使載波中心的噪聲分布變寬,甚至在幾兆赫茲的頻帶內形成干擾雜散信號。采用視覺物聯網下的控制技術不會受到雜散干擾,而傳統技術會受到雜散干擾影響,使控制效果較差,為了驗證該點,將兩種技術進行對比,結果如圖6所示。

圖6 雜散干擾下兩種技術控制效果對比
通過圖6所示的對比結果可知:當雜散干擾為30 Hz時,采用傳統技術控制效果為60%,而采用視覺物聯網下控制技術的控制效果為75%;當雜散干擾為60 Hz時,采用傳統技術控制效果為70%,而采用視覺物聯網下控制技術的控制效果為71%;當雜散干擾為90 Hz時,采用傳統技術控制效果為70%,而采用視覺物聯網下控制技術的控制效果為70%;當雜散干擾為120 Hz時,采用傳統技術控制效果為72%,而采用視覺物聯網下控制技術的控制效果為69%;當雜散干擾為150 Hz時,采用傳統技術控制效果為70%,而采用視覺物聯網下控制技術的控制效果為65%;當雜散干擾為180 Hz時,采用傳統技術控制效果為55%,而采用視覺物聯網下控制技術的控制效果為62%;當雜散干擾為210 Hz時,采用傳統技術控制效果為42%,而采用視覺物聯網下控制技術的控制效果為75%。由對比結果可知,在雜散干擾下,采用視覺物聯網下控制技術比傳統技術對信號的控制效果要好。
2.2.4 鄰道干擾
鄰道干擾指的是相鄰波道之間的干擾信號,由于調頻信號頻譜較寬,使發射機產生的諧波分量分別散落到不同接收機中的通帶內,該現象的產生會嚴重干擾鄰道信號的正常發送。采用視覺物聯網下的控制技術不會受到鄰道干擾,而傳統技術會受到鄰道干擾影響,使控制效果較差,為了驗證該點,將兩種技術進行對比,結果如圖7所示。

圖7 鄰道干擾下兩種技術控制效果對比
由圖7可知:兩種技術最初控制效果都大于等于60%,隨著鄰道干擾逐漸下降。當鄰道干擾信號強度為50 Hz時,傳統技術控制效果為55%,視覺物聯網下控制技術的控制效果為75%;當鄰道干擾信號強度為100 Hz時,傳統技術控制效果為45%,視覺物聯網下控制技術的控制效果為70%;當鄰道干擾信號強度為150 Hz時,傳統技術控制效果為40%,視覺物聯網下控制技術的控制效果為70%;當鄰道干擾信號強度為200 Hz時,傳統技術控制效果為35%,視覺物聯網下控制技術的控制效果為68%;當鄰道干擾信號強度為250 Hz時,傳統技術控制效果為30%,視覺物聯網下控制技術的控制效果為65%;當鄰道干擾信號強度為300 Hz時,傳統技術控制效果為20%,視覺物聯網下控制技術的控制效果為64%;當鄰道干擾信號強度為350 Hz時,傳統技術控制效果為19%,視覺物聯網下控制技術的控制效果為60%。由對比結果可知,在鄰道干擾下,采用視覺物聯網下控制技術比傳統技術對信號的控制效果要好。
2.3 實驗結論
綜上所述:視覺物聯網下智能養老監控系統信號控制技術是具有可靠性的。在同頻干擾下,采用視覺物聯網下控制技術最高控制效果可達到83%;在互調干擾下,采用視覺物聯網下控制技術最高控制效果可達到90%;在雜散干擾下,采用視覺物聯網下控制技術最高控制效果可達到75%;在鄰道干擾下,采用視覺物聯網下控制技術最高控制效果可達到75%。由此可知,采用視覺物聯網下智能養老監控系統信號控制技術效果較好。
3 結論與展望
3.1 結論
采用視覺物聯網下智能養老監控系統信號控制技術,改善了傳統技術存在的控制效果差問題。使用自適應聯合濾波信號定位方法,使信號的傳輸具有可靠性,有效減少了信號干擾而導致時延問題出現的次數,并緩解信號傳輸壓力,實現高效信號分發控制的目的。
在視覺物聯網下對信號進行監控,可支持管理者直接對系統的控制,通過實驗驗證結果可知,該系統具有良好控制效果,且最高控制效果可達到90%,滿足養老監控系統信號控制要求。
3.2 展望
采用視覺物聯網下智能養老監控系統信號控制技術,在未來研究過程中,可作為主要研發機制,廣泛應用于電子行業所生產的某種監控系統之中,為提高大規模養老監控系統性能奠定堅實基礎,也為我國交通監控和航天監控領域提供科學依據。
猜你喜歡
中老年保健(2021年12期)2021-11-30 02:58:01
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
建材發展導向(2019年13期)2019-08-24 06:37:40
電子制作(2019年7期)2019-04-25 13:16:50
攝影之友(影像視覺)(2019年2期)2019-03-05 08:27:14
電子制作(2018年11期)2018-08-04 03:25:42
中華詩詞(2018年11期)2018-03-26 06:41:34
Coco薇(2016年8期)2016-10-09 02:11:50
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
