某有源靶彈微波源程序指向系統的設計與實現
2018-09-19 09:40:34馬洪霞
計算機測量與控制 2018年9期
馬洪霞,梁 彥
(中國人民解放軍92941部隊42分隊,遼寧葫蘆島 125001)
0 引言
掠海有源靶彈主要是模擬敵配裝末制導雷達的反艦導彈跟蹤攻擊被試艦艇,以考核裝配微波被動導引頭的艦空導彈反導能力的空中靶標,其要求靶彈的微波輻射源穩定照射被試艦艇。當前使用的有源靶彈主要采用裝備時間較長的反艦導彈改裝,靶彈微波輻射源對被試艦艇的照射則利用原型彈的導引頭自動撲捉跟蹤被試艦艇。由于靶彈原型彈導引頭存在超出使用壽命、靈敏度較低等原因,而造成導引頭撲捉跟蹤被試艦艇不穩定、旁瓣撲捉、錯撲其它目標等問題,從而,大大降低了供靶成功率。因此,為解決裝備試驗的急需,提高供靶成功率,研制了在原掠海有源靶末制導雷達基礎上的微波源程序指向系統。
1 系統技術要求
通過有源靶彈的對目標艦的照射需求和不同供靶航路、靶彈原末制導雷達的關系,綜合論證了微波源程序指向系統的主要功能、改裝要求、主要技術指標等技術要求。
1.1 功能要求
掠海有源靶彈微波源程序指向系統的主要功能是,當靶彈原末制導雷達工作異常時,控制原型彈末制導雷達主波束穩定的對準被試艦艇,具體功能為:
1)輔助跟蹤功能。當末制導雷達不能穩定撲捉跟蹤被試艦艇時,系統能夠根據不同的供靶方案,自動對準或程序指向,控制末制導雷達主波束準確對準被試艦艇;
2)自動切換功能。系統能夠實時監測末制導雷達的工作狀態,當工作異常時,自動切換到程序指向的輔助跟蹤狀態;
3)射前裝訂功能。系統能夠根據要求,通過射前裝訂方式,設置工作狀態。
4)狀態監視功能。系統能夠實時記錄、自動判斷,并下傳末制導雷達的工作狀態及其主波束指向等到安控地面站并顯示。
1.2 改裝要求
由于該系統是在改裝成熟的原有源靶彈基礎上,為解決試驗急需而進行的,因此,改裝具體要求為:
1)改動內容盡可能少,應滿足靶彈現有空間、供電等要求;
2)增加該系統后,不能影響原型靶彈的性能、指標;
3)系統應盡可能簡化設計,提高系統的工作可靠性。
1.3 主要技術指標
經過論證,系統的主要技術指標:
指向精度: <3°(1σ);
指向計算時間:<2 ms;
指向計算周期:<100 ms;
指向延遲:雷達開機3.2 s識別雷達狀態,若狀態異常,0.3 s后自動切換程序指向狀態;
有效時間:≥30 s。
2 設計方案
2.1 設計思路
針對有源靶彈供靶保障中存在的問題和系統研制的技術要求,確定了將彈上安控系統與微波源程序指向系統進行一體化設計,并對地面站軟件進行適應性改進的研制思路。靶彈安控系統主要包括彈上安控系統,安控地面站組成,程序指向系統就是在原有彈上安控系統上進行硬件擴容,軟件升級。同時,對安控地面站的指令和指示傳輸顯示通道擴充,該部分只涉及軟件升級工作。
1)立足現有安控器及主被動地面站體系,遵循向下兼容,進行無縫升級;
2)拓展安控器功能,挖掘已有硬件資源潛力,滿足微波源程序指向功能需求;
3)維持安控器系統定型模式,增加控制微波源控制接口,維持原有數據傳輸設備,確保系統可靠性;
4)沿用原有主被動地面站體制,通過擴展輸入輸出開關量通道及升級軟件,完成程序指向功能擴展;
5)共用靶載安控器計算機,實現供靶飛行中指向信息實時解算,控制微波源完成指向功能。
2.2 系統硬件設計
系統是在原靶彈安控系統基礎上進行一體化設計,對靶彈彈上安控系統進行硬件D/A接口擴充,在原安控器基礎上,擴展4路輸出,用于程序指向電壓、程序指向標志電壓控制;利用原指令輸出擴展微波輔助控制指令,控制微波輔助繼電器,實現對輻射方向的控制,見圖1虛線部分。
2.3 程序指向角計算模型
圖1 系統一體化設計框圖
對于靶彈雷達機械軸與彈軸有一個固定夾角為α,靶彈與目標構成的視線角記為β[1]。以靶彈發射點O為原點,以理論射向為x軸,按右手定則水平方向垂直x軸為z軸建立發射坐標系,t時刻靶彈位置為B(x1,z1),被試艦位置為A(x2,z2),如圖2所示,直線OB與直線BA夾角即為靶彈與目標構成的視線角β[2],計算公式為:

式中,k1為直線OB斜率,k2為直線BA斜率。
圖2 發射坐標系靶彈、被試艦與雷達視線關系
靶彈位置B(x1,z1)來自靶彈安控GPS數據,發射艦位置A(x2,z2)根據協同程序推算,B點、A點坐標均為大地坐標 (B緯度,L經度,H高度),實際使用時先把大地坐標轉換為地心直角坐標 (x,y,z)再將地心直角坐標(x,y,z) 轉換為靶彈發射坐標系[3]。
轉換矩陣為:

式中,αF為靶彈射向,靶彈在發射坐標系坐標為:
被試艦位置使用理論航路進行推算,首先將靶彈發射時被試艦的位置 (大地坐標,高度用0)計算出在靶彈發射坐標系的位置,在XOZ平面上根據被試艦的航向和航速,確定一條射線,根據靶彈飛行時間來確定其位置[4]。
設靶彈發射時刻為T0,T0時刻被試艦在XOZ平面上的位置是XS0、ZS0,航向為ψ(單位為°,真北方位角),航速為VS(單位是m/s),則其航路可用直線方程來表示。

靶彈的發射系坐標已知,被試艦的發射系坐標已知,天線機械偏角已知,即可根據反正切函數計算角度。
2.4 程序指向系統的工作模式設計
2.4.1 程序指向系統工作模式
程序指向系統設計了三種工作模式,各工作模式間可以相互切換,使系統工作靈活。
1)工作模式1:雷達模式。
該模式為原型彈末制導雷達的工作模式,其能較為真實地模擬彈載和機載雷達對目標搜索、捕捉、跟蹤的全過程,不依賴外部提供靶標位置和姿態信息,獨立性強,天線對準精度高[5]。
2)工作模式2:自動控制模式。
該模式是靶彈末制導雷達工作異常時的主要工作模式,其實時解算靶載微波源天線軸線與目標之間的夾角[6],與天線當前角度相比較形成解算方位誤差信號代替來自信號接收及處理系統真實角誤差信號,驅動天線對準預定目標的工作模式。該模式簡化了原配末制導雷達功能,輻射微波源只需要微波發射組合、天線伺服機構等少數部件正常工作即可實現定向輻射,對原末制導雷達的要求降低,可靠性提高。
3)工作模式3:程序指向模式。
該模式為工作模式2的備用模式,其利用射前裝定的理論彈道數據代替靶標的位置及運動信息進行指向角解算[7],驅動天線定向輻射的工作模式。該模式同樣簡化了原配末制導雷達功能,對雷達要求降低。
2.4.2 程序指向系統三種工作模式的切換
靶彈發射后,靶載微波源首先進入雷達模式對目標進行搜索與跟蹤以實現定向輻射;當雷達不能正常捕獲目標時,利用靶標位置及姿態等信息自動解算天線指向角轉入自動控制模式;當靶標位置等數據無效時 (如出現慣導故障、GPS失捕或信號傳輸故障等情況),則自動進入天線程序控制模式,引入理論彈道數據控制天線按程序轉動照射預定目標。
2.5 程序指向系統接入末制導雷達控制回路設計
雷達方位控制電壓和程序指向電壓切換電路如圖3所示。彈上安控PC-104計算機發出輔控指令,繼電器J1吸合,常開點接到運算放大器輸出端,計算機依據靶彈當前位置和攔截艦位置計算出程序指向角,通過D/A1通道輸出到運算放大器輸入端,這時雷達電軸在程序指向電壓作用下指向攔截艦;同時計算機發出輔控標志置位指令,繼電器J2吸合,輸出+27 V控制電壓到雷達伺服機構使雷達天線接入程序指向回路。
圖3 雷達方位控制電壓和程序指向電壓切換電路
2.6 程序設計
系統軟件在安控系統數據獲取、自主式安控解算、被動式安控接收、指令控制和輔助測試等軟件的基礎上,增加程序指向模塊,作為一個軟件模塊嵌入到原安控程序,軟件組成見圖4。該模塊利用GPS實時獲取靶彈飛行數據及發射點、攔截艦位置信息,通過PC-104計算機運行程序指向模塊,解算結果由D/A擴展模塊輸出給微波源控制組合,控制輻射天線指向目標艦艇。
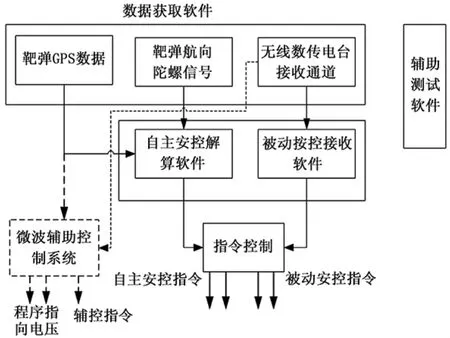
圖4 軟件組成框圖
程序指向模塊與安控程序共享CPU等硬件資源,在軟件初始化階段讀入程序指向配置文件,在執行原安控指令后,如果不需要執行程序指向,則安控程序執行原下傳信息編碼模塊;如果滿足程序執行發出條件,或接受到被動“輔控指令”,則執行程序指向模塊。程序指向模塊先計算程序指向角,變換成控制電壓數據寫入D/A,再發出“輔控指令”、“輔控標志”指令[8],然后執行下傳信息編碼模塊,軟件流程圖見圖5。
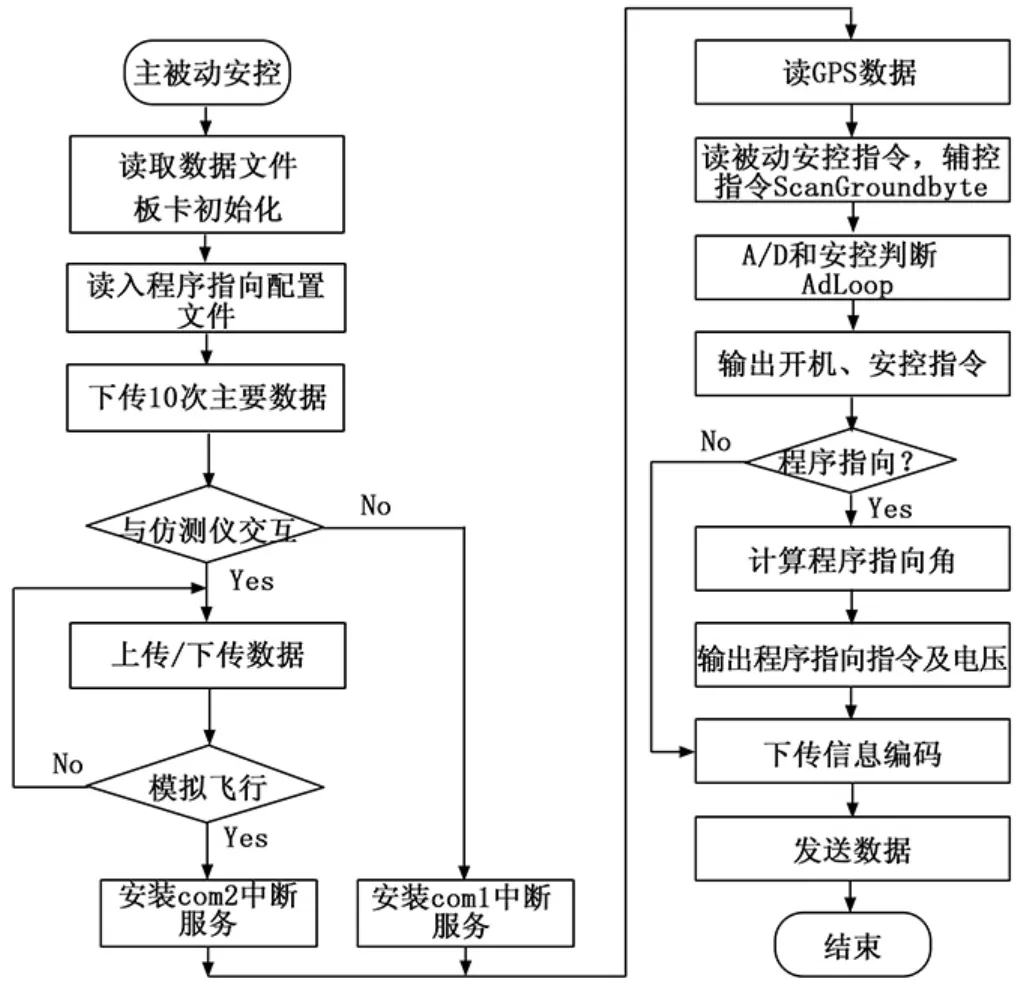
圖5 系統軟件流程圖
程序指向模塊中計算程序指向角的原始數據為靶彈GPS經緯度、攔截艦坐標等都是離散數據,使得輸出指向角也是每2 ms更新一次的離散數字量,經D/A模塊轉換形成微波源指向模擬量是不平滑的模擬電壓,從而引起微波源伺服系統工作不平穩,為了平穩控制微波源,須對指向角進行數字濾波處理,而安控器PC104計算機中無硬件濾波通道,因此,設計了軟件數字濾波模塊完成指向角濾波功能。
程序指向模塊仍然借助PC-104開發工具,采用Visual C++語言編寫運算與控制軟件,編寫調試完成后,首先由模擬數據輸入模型,測試模型輸出數字量,數字量經硬件輸出后,儀器監測輸出模擬量,由數據分析軟件分析數據正確性;實驗室單機調試階段,主要進行改進后電路板與接口配置正確性檢查和通路檢查,以及一體化安控系統軟件運行后輸出測試,軟件正確性驗證;與靶彈對接調試階段,主要進行接口對接,檢查改進正確性;仿真驗證階段,依據以往實際海上飛行數據,輸入真實的靶彈GPS、攔截艦、發射點信息,驗證指向角輸出正確性和指向精度。
主被動安控地面站軟件升級包括控制板軟件升級和地面站顯控軟件的升級改造。控制板軟件升級保持原有布局,將備用“被動自毀”指令及按鈕更改為“程序指向”指令及按鈕,將航控電壓顯示時間由150 s壓縮到90 s以便觀察;地面站顯控軟件的升級為了監控程序指向系統輔控效果,而增加地面站監控功能,其需增加下傳數據容量,方法是在安控器系統下傳數據包由一幀64字節調整為72字節,新增數據置于數據包最后,維持以往數據定義,不影響數據接收提取,僅微調接收數據包數量。
3 工程應用
3.1 裝配靶彈情況
該系統具有結構簡單、功能完備、工作可靠、指向精度高、通用性好等特點,已成功裝配于2個系列多型有源靶彈,解決了不同靶彈的不同型號、不同頻率、不同波束寬度微波源在不同供靶方案情況下的精準指向問題,實現了不同型號靶彈微波源程序指向系統的通用。
3.2 供靶試驗情況
該系統已7次成功應用于靶場試驗供靶任務,其中,4次為雷達模式供靶,3次為自動模式供靶。在這3次自動模式供靶中,2次為末制導雷達副瓣撲捉、1次為錯誤撲捉其它目標的異常情況,系統均能夠準確判斷雷達情況,自動切換到自動控制模式,避免了3枚靶彈的無效供靶。
3.3 供靶精度分析
某次供靶任務中,系統首先進入雷達模式,但雷達模式出現副瓣撲捉照射現象,系統判斷后,利用靶標位置及姿態等信息自動解算天線指向角轉入自動控制模式,程序指向角與靶彈雷達航控電壓比對見圖6。
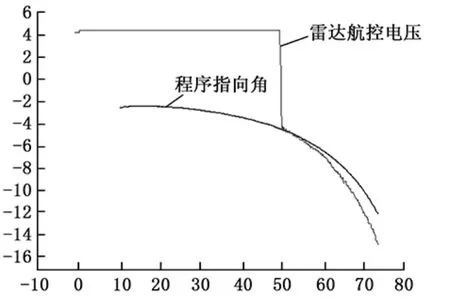
圖6 程序指向角與靶彈雷達航控電壓比對圖
可見前10 s,二者最大差值為0.44 V,換算成角度大約0.25°;10~15 s間,最大差值為2.88 V,換算成角度大約1.7°;15~30 s間,近似 2°[9]; 由于開環控制,雷達伺服控制誤差近似為 1°[10]。
經分析,微波輔助控制產生的綜合誤差主要來源于算法誤差σ1,靶彈GPS定位誤差σ2、攔截艦艦位誤差σ3,靶彈雷達固定偏角誤差σ4、靶彈雷達伺服非線性誤差σ5及靶彈雷達伺服控制誤差σ6,則綜合誤差σ[11]可用下式表示:

經計算得,程序指向綜合誤差σ為:σ<2.3°。
因此,程序指向方法產生的綜合誤差小于指標3°,滿足供靶要求。
4 結束語
本文介紹了基于有源靶彈安控系統的微波源程序指向系統的一體化設計方案,論證了微波源程序指向系統的技術要求,建立了程序指向角計算模型,設計了程序指向系統的雷達模式、自動控制模式和程序指向模式等三種能夠自動切換的工作模式,研制了掠海有源靶彈微波源程序指向系統,闡述了微波源程序指向系統的裝配靶彈情況和實際供靶飛行情況。掠海有源靶彈微波源程序指向系統的研制成功,解決了有源靶彈供靶過程中存在的微波源對攔截艦艇照射不穩定,而導致供靶失敗的問題,本文對其它型號有源靶彈的研制也具有一定的借鑒作用。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
人大建設(2019年12期)2019-05-21 02:55:44
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中山大學法律評論(2018年1期)2018-03-30 01:21:00
瞭望東方周刊(2017年42期)2017-12-05 18:49:38
家庭影院技術(2017年9期)2017-09-26 03:41:45
環球時報(2017-03-30)2017-03-30 06:44:45
