
基于運(yùn)動(dòng)放大的振動(dòng)結(jié)構(gòu)的模態(tài)識(shí)別
2018-09-19 09:40:46李麗霞陳海衛(wèi)
計(jì)算機(jī)測(cè)量與控制 2018年9期
李麗霞,陳海衛(wèi)
(江南大學(xué)機(jī)械工程學(xué)院,江蘇無(wú)錫 214122)
0 引言
快速準(zhǔn)確地獲取結(jié)構(gòu)的振動(dòng)信息是進(jìn)行結(jié)構(gòu)模態(tài)分析從而確定模態(tài)參數(shù)的關(guān)鍵。傳統(tǒng)的模態(tài)參數(shù)識(shí)別一般采用加速度計(jì)測(cè)量[1]。但測(cè)量過(guò)程工作量大又枯燥乏味,并且在測(cè)量微小結(jié)構(gòu)時(shí),加速度計(jì)本身會(huì)增加測(cè)量結(jié)構(gòu)的質(zhì)量并影響測(cè)量結(jié)果。視覺(jué)測(cè)量是一種非接觸式的振動(dòng)測(cè)量技術(shù),具有全場(chǎng)測(cè)量、不改變被測(cè)結(jié)構(gòu)的振動(dòng)特性等優(yōu)點(diǎn)。隨著計(jì)算機(jī)視覺(jué)和高速相機(jī)技術(shù)的發(fā)展,視覺(jué)測(cè)量振動(dòng)逐漸受到人們的重視,無(wú)論是高精密、高分辨率的相機(jī),還是隨處可見(jiàn)的類(lèi)似手機(jī)攝像頭的設(shè)備,都能用到實(shí)際測(cè)量中,只是如何提取可量化信息還是一直研究的問(wèn)題。為此,研究人員提出了許多圖像處理算法,主要有邊緣檢測(cè),目標(biāo)跟蹤等[2-4],如陳若珠對(duì)粘貼有人工標(biāo)志的彈性結(jié)構(gòu)試件進(jìn)行變形位移的測(cè)量[5];王冠英等人采用掃描儀與Matlab圖像處理技術(shù)相結(jié)合的方法,對(duì)織針針坯模具進(jìn)行了快速、準(zhǔn)確地非接觸式測(cè)量[6]。相比常規(guī)圖像處理算法,一些計(jì)算機(jī)視覺(jué)算法可以更好地解決振動(dòng)測(cè)量的問(wèn)題,如E.Caetano提出了用光流法確定結(jié)構(gòu)的位移[7],J.Chen提出了檢測(cè)結(jié)構(gòu)中亞像素運(yùn)動(dòng)的位移提取方法[8],這些方法通過(guò)時(shí)域?yàn)V波可提取結(jié)構(gòu)的不同階模態(tài),在模態(tài)識(shí)別方面比較理想。本文研究的模態(tài)識(shí)別方法與其相關(guān)。
本文采用了一種新的運(yùn)動(dòng)放大算法——基于相位的里斯金字塔快速運(yùn)動(dòng)放大[9],用于結(jié)構(gòu)的模態(tài)識(shí)別。該算法可以在不提取振動(dòng)位移的情況下直接展示結(jié)構(gòu)的模態(tài)振型,且該算法采用里斯金字塔空間分解,使其處理速度得到了很大程度的提高,因此也稱(chēng)其為實(shí)時(shí)運(yùn)動(dòng)放大。本文首先對(duì)運(yùn)動(dòng)放大的理論進(jìn)行了概述,接著以懸臂梁為例,搭建了基于加速度計(jì)和高速相機(jī)的模態(tài)識(shí)別實(shí)驗(yàn)系統(tǒng),并對(duì)其實(shí)驗(yàn)結(jié)果進(jìn)行模態(tài)置信準(zhǔn)則 (MAC)檢驗(yàn)。本文的研究對(duì)于基于視覺(jué)的振動(dòng)測(cè)量方面具有重要意義。
1 理論
1.1 圖像處理
視頻由一系列圖片組成,因此有兩個(gè)域:空間域?qū)?yīng)一幅圖像亮度值的2D場(chǎng),時(shí)域?qū)?yīng)隨著時(shí)間變化生成視頻的圖像。在空間域,圖像可以被濾波器分解成振幅和相位信號(hào),類(lèi)似于一個(gè)加速度傳感器信號(hào)傅里葉變換或小波變換被分解。圖像處理的結(jié)果就是使得所有圖像的空間振幅信號(hào)和相位信號(hào)合成后得到比原圖像更容易處理的時(shí)變信號(hào)。
1.2 運(yùn)動(dòng)放大
運(yùn)動(dòng)放大[9-12]是一種可放大人肉眼不可見(jiàn)的微小運(yùn)動(dòng)的計(jì)算機(jī)視覺(jué)技術(shù),被形象地稱(chēng)為“微小運(yùn)動(dòng)顯微鏡”。該技術(shù)在2013年被美國(guó)Science提名為過(guò)去10年將科學(xué)研究成果帶入人們生活的重要發(fā)現(xiàn)之一。運(yùn)動(dòng)放大技術(shù)最早由美國(guó)MIT的Freeman團(tuán)隊(duì)提出,并在不斷地發(fā)展和改進(jìn)。2005年Liu等人提出了基于拉格朗日的運(yùn)動(dòng)放大方法[10],該方法通過(guò)圖像配準(zhǔn)、特征點(diǎn)跟蹤、運(yùn)動(dòng)軌跡聚類(lèi)、密集光流插值、運(yùn)動(dòng)層分割、指定層的放大,以及視頻渲染實(shí)現(xiàn)了視頻微小運(yùn)動(dòng)的放大。2012年Wu等人提出了一種線性的基于歐拉的微小運(yùn)動(dòng)放大方法[11],該方法將視角固定在整幅圖像,假設(shè)整幅圖像都在變化,只是這些變化信號(hào)的頻率、振幅等特性各不相同,經(jīng)過(guò)對(duì)每個(gè)像素點(diǎn)進(jìn)行空間分解,再經(jīng)過(guò)時(shí)域?yàn)V波將感興趣的信號(hào)提取出來(lái),最后只放大感興趣的信號(hào)部分。2013年,Neal等人提出了一種基于相位的運(yùn)動(dòng)放大技術(shù)[12](Phase-based video motion processing),該方法是對(duì)歐拉運(yùn)動(dòng)放大法的改進(jìn),采用復(fù)合可控金字塔進(jìn)行圖像的空間分解,有效抑制了圖像噪聲,并且支持更大的放大倍數(shù)。2014年Neal等人又提出了運(yùn)動(dòng)放大技術(shù)的一種加速方法——里斯金字塔對(duì)基于相位的運(yùn)動(dòng)放大方法的加速[9],該方法相比之前的方法使得處理速度提升了20%~80%,因此也稱(chēng)實(shí)時(shí)運(yùn)動(dòng)放大。目前,微小運(yùn)動(dòng)放大技術(shù)已經(jīng)在影像處理、醫(yī)療診斷、機(jī)械工程等領(lǐng)域中表現(xiàn)出重要的應(yīng)用前景,例如,在醫(yī)療診斷中通過(guò)捕捉人臉的視頻信息分析人體的心率,實(shí)現(xiàn)非接觸式的脈搏檢測(cè)技術(shù);在遠(yuǎn)程手術(shù)中通過(guò)運(yùn)動(dòng)放大技術(shù)將醫(yī)生肉眼不容易看清的手術(shù)部位進(jìn)行放大可以有效提高手術(shù)效率,在工程應(yīng)用上,通過(guò)視頻放大技術(shù)對(duì)結(jié)構(gòu)微小變形進(jìn)行監(jiān)控,能對(duì)危險(xiǎn)事故作出有效的判斷和預(yù)警,減少工程事故的發(fā)生。本文的研究就是運(yùn)動(dòng)放大技術(shù)在結(jié)構(gòu)振動(dòng)模態(tài)方面的應(yīng)用。
1.3 基于相位的里斯金字塔快速運(yùn)動(dòng)放大技術(shù)
運(yùn)動(dòng)放大[10]是一種通過(guò)空間分解、時(shí)頻帶通濾波、放大,以及重建,來(lái)獲取一些肉眼不見(jiàn)的運(yùn)動(dòng)信息的技術(shù)。本文采用的算法是運(yùn)動(dòng)放大的一種新的算法——基于相位的里斯金字塔快速運(yùn)動(dòng)放大,采用里斯金字塔濾波器將視頻信號(hào)分解為局部空間振幅和相位,局部相位信號(hào)直接在時(shí)域上帶通濾波和放大,然后重建成指定頻率帶上的運(yùn)動(dòng)被放大的視頻。其處理過(guò)程如圖1所示。
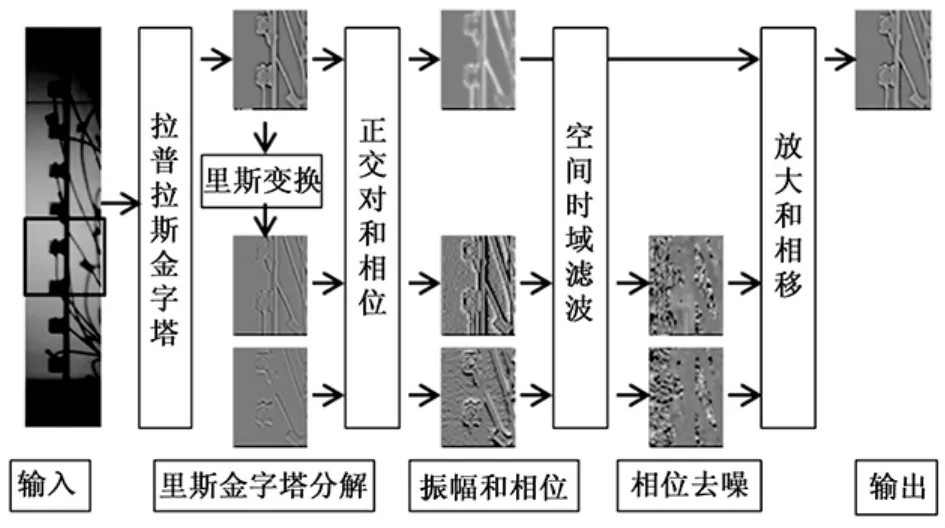
圖1 基于相位的里斯金字塔快速放大算法處理過(guò)程
相比之前的運(yùn)動(dòng)放大算法,該算法采用希爾伯特變換的二維推廣——里斯變換,使運(yùn)動(dòng)放大的速度達(dá)到每秒處理35幀640*400的圖片 (常用的筆記本電腦處理系統(tǒng))。在二維空間,里斯變換是一對(duì)帶有傳遞函數(shù)的濾波器F1,F(xiàn)2。如若將它們應(yīng)用于圖像子帶I(x,y,t),其結(jié)果就是一對(duì)濾波器響應(yīng)R1,R2。
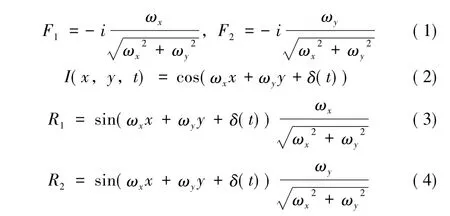
里斯變換可以被引向任意方向,因此具有方向不變性。例如圖像序列通過(guò)公式 (5)矩陣相乘可以指向任意θ方向,從而在指定方向進(jìn)行希爾伯特變換。

如果里斯變換通過(guò)tan-1(R2/R1)被引向主方向θ0矩陣相乘的結(jié)果就只有一個(gè)非零向量,在上面的例子中,輸入圖像序列沿著主方向的希爾伯特變換結(jié)果就是:

類(lèi)似一維變換,與原圖像序列結(jié)合生成一個(gè)含有相位的復(fù)合信號(hào):

這個(gè)信號(hào)能被時(shí)域?yàn)V波消除wxx+wyy部分。剩余項(xiàng)δ(t)是能被放大并用于相位變換的復(fù)合信號(hào),其實(shí)部是原圖像序列I(x,y,t)被放大的部分,即:

里斯變換的圖像表現(xiàn)如圖2所示。
更多關(guān)于基于相位的里斯金字塔快速運(yùn)動(dòng)放大算法的詳細(xì)解釋和推導(dǎo)見(jiàn)參考文獻(xiàn)[8]。
1.4 模態(tài)置信準(zhǔn)則 (Mode Assurance Criterion)
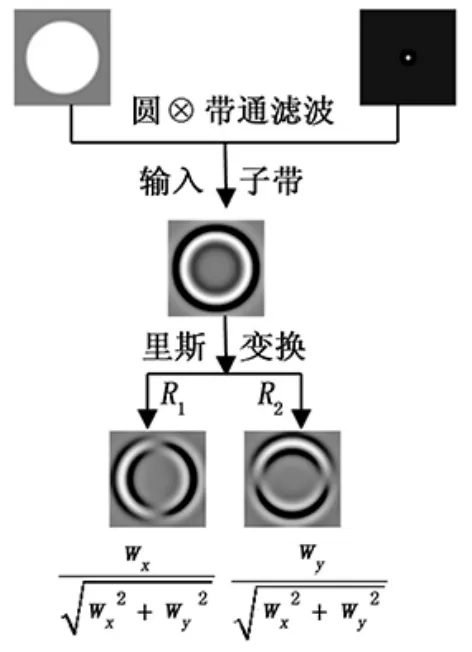
圖2 里斯變換
模態(tài)置信準(zhǔn)則 (Mode Assurance Criterion)又稱(chēng)振型相關(guān)系數(shù),是用來(lái)表示兩個(gè)模型之間的模態(tài)振型相似度。振型相關(guān)系數(shù)通常采用以下定義:
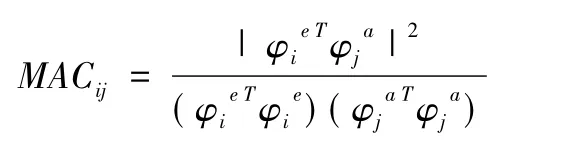
其中:MACij代表一種模型第i階振型與另一種模型的第j階振型之間的相關(guān)系數(shù);代表一種模型的第i階振型;代表另一種模型的第j階振型;T代表共軛轉(zhuǎn)置。
本文我們通過(guò)對(duì)兩種模型之間的振型進(jìn)行了振型相關(guān)系數(shù) (MAC)的計(jì)算,以此來(lái)檢查實(shí)驗(yàn)?zāi)P蛿?shù)據(jù)的好壞。
2 模態(tài)識(shí)別
理論計(jì)算和有限元分析是理論模態(tài)分析方法,作為實(shí)際生活中試驗(yàn)?zāi)B(tài)的數(shù)據(jù)參考,一般來(lái)說(shuō)理論分析的模態(tài)參數(shù)更具有參考優(yōu)勢(shì),所以本文采用的理論依據(jù)為理論分析的模態(tài)參數(shù)。加速度計(jì)測(cè)量是試驗(yàn)?zāi)B(tài)識(shí)別中常用的接觸式測(cè)量方法,且測(cè)量結(jié)果比較準(zhǔn)確,只是在測(cè)量微小結(jié)構(gòu)時(shí)將無(wú)法保證測(cè)量數(shù)據(jù)的準(zhǔn)確性,所以為了使得加速度計(jì)測(cè)量數(shù)據(jù)作為對(duì)比的依據(jù),本文選用便于安裝加速度計(jì)的懸臂梁結(jié)構(gòu)。下面以懸臂梁為例,進(jìn)行了振動(dòng)結(jié)構(gòu)模態(tài)識(shí)別方法的研究。
2.1 理論模態(tài)

其中:E為楊氏模量,I為梁截面對(duì)中性軸的慣性矩,ρ為梁的密度,S為梁的橫截面積,ε(x,t)為梁的橫向彎度。
采用分離變量法,令ε(x,t)=Y(x)T(t),所謂振型分析就是對(duì)Y(x)求解,引入中間變量則:

其中:Y1,Y2,Y3,Y4由邊界條件確定。對(duì)于長(zhǎng)度為L(zhǎng)的懸臂梁,邊界條件如下:
懸臂梁振動(dòng)方程:

將式 (11)代入式 (10),得:

求解方程得 α1L=1.875; α2L=4.694; α3L=7.854; αnL=(n- 0.5)π,(n≥4)。


本文實(shí)驗(yàn)的懸臂梁長(zhǎng)度L=1.2 m,厚度h=0.006 m,寬度b=0.03 m。所用材料彈性系數(shù)E=2×1011kg/m2,梁的密度ρ=7.8×103kg/m3。計(jì)算得前3階頻率為:f1=3.41 Hz;f2=21.36 Hz;f3=59.80 Hz。
懸臂梁振型曲線方程即為Yn(x)=Y1sinαnx+Y2cosαnx+Y3sinhαnx+Y4coshαnx懸臂梁前3階模態(tài)振型如圖3所示。
另外,懸臂梁的固有頻率:

圖3 懸臂梁理論模態(tài)振型
2.2 加速度計(jì)測(cè)量
系統(tǒng)結(jié)構(gòu)的模態(tài)參數(shù)識(shí)別方法主要分為頻域識(shí)別法和時(shí)域識(shí)別法。頻域識(shí)別法主要是在測(cè)量過(guò)程中利用輸入信號(hào)和輸出響應(yīng)進(jìn)行傅里葉變換和拉普拉斯變換,以獲取系統(tǒng)結(jié)構(gòu)的頻域響應(yīng)函數(shù)和傳遞函數(shù),再由它們來(lái)獲得系統(tǒng)結(jié)構(gòu)的模態(tài)參數(shù)。所以即使是信噪比相對(duì)較差的情況下,使用頻域識(shí)別法也能獲得較好的識(shí)別結(jié)果。LMS系統(tǒng)的錘擊法模態(tài)測(cè)量就是一種頻域識(shí)別法。下面是本文采用的加速度計(jì)測(cè)量模態(tài)的步驟:
1)建立LMS錘擊法模態(tài)測(cè)試實(shí)驗(yàn)系統(tǒng),包括LMS測(cè)振系統(tǒng)、加速度傳感器、懸臂梁等,如圖4所示。
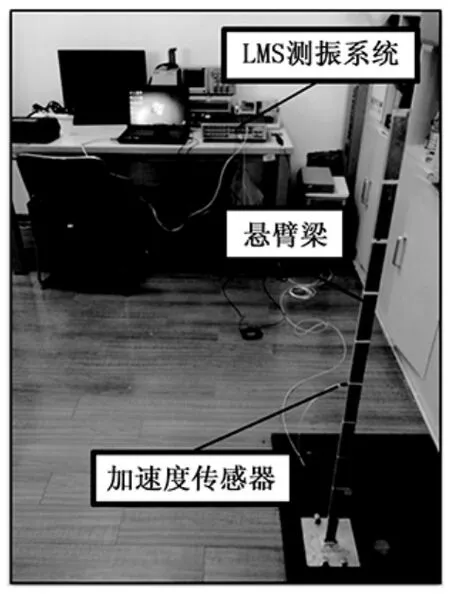
圖4 懸臂梁加速度計(jì)實(shí)驗(yàn)裝置
2)根據(jù)模態(tài)分析原理,因?yàn)檫x用錘擊法激振,所以本文選用的懸臂梁結(jié)構(gòu)較為輕小、阻尼不大。為了避免加速度計(jì)本身對(duì)測(cè)量結(jié)構(gòu)的影響,實(shí)驗(yàn)只安裝了一個(gè)加速度計(jì),采用多點(diǎn)敲擊單點(diǎn)響應(yīng)的方法,在設(shè)置的各個(gè)點(diǎn)依次敲擊測(cè)量。采集的振動(dòng)位移信號(hào)如圖5所示。
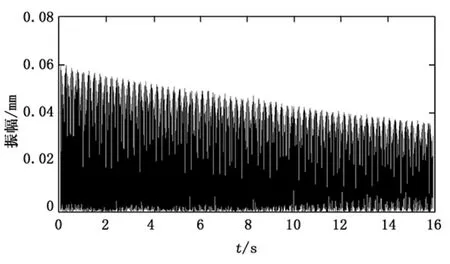
圖5 懸臂梁的振動(dòng)位移信號(hào)
3)選擇頻響函數(shù)比較好的測(cè)量數(shù)據(jù)進(jìn)行懸臂梁的模態(tài)分析,最終確定的懸臂梁結(jié)構(gòu)的前三階模態(tài)參數(shù)如圖6所示。(a)、(b)、(c)分別表示懸臂梁頻率為3.36 Hz的第一階、20.77 Hz的第二階,和58.16 Hz的第3階模態(tài)振型。
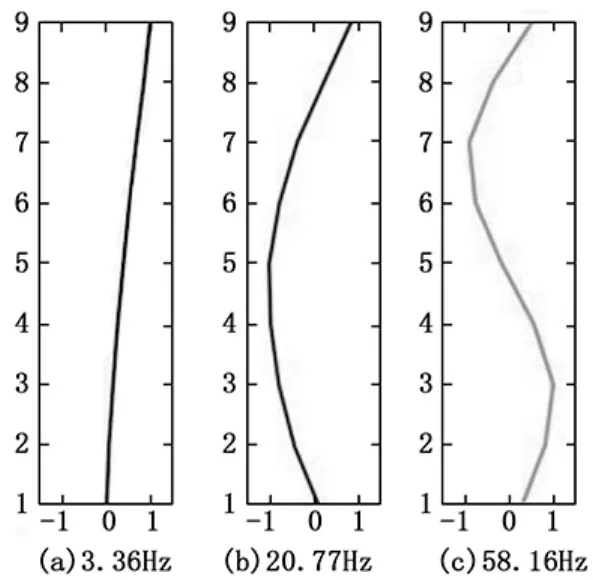
圖6 加速度計(jì)測(cè)量的模態(tài)參數(shù)
2.3 高速相機(jī)測(cè)量
采用高速相機(jī)進(jìn)行模態(tài)識(shí)別的過(guò)程如下:
1)測(cè)量系統(tǒng)搭建:搭建高速相機(jī)圖像采集系統(tǒng),主要由IDT-Y4-S1型號(hào)的高速相機(jī)、補(bǔ)光燈、懸臂梁等組成。如圖7所示。
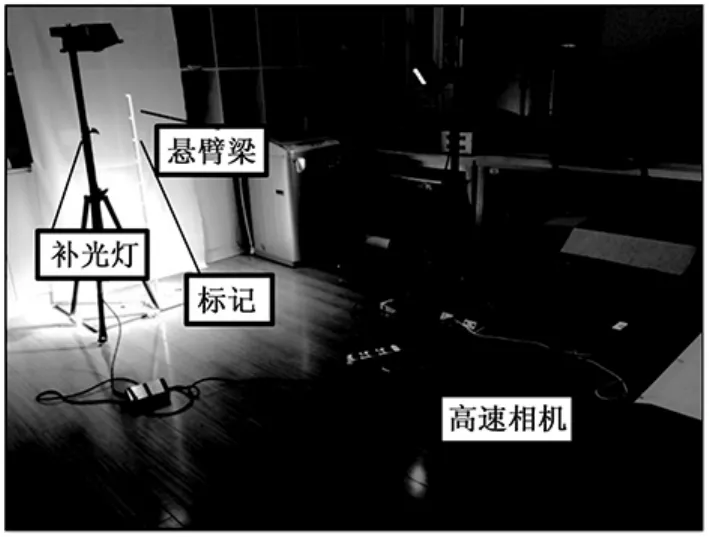
圖7 懸臂梁高速相機(jī)實(shí)驗(yàn)裝置
2)視頻采集:采用錘擊法激勵(lì)懸臂梁,力錘激勵(lì)后相機(jī)隨即以1 500幀/s進(jìn)行視頻采集,視頻分辨率為224*672。
3)基于相位的里斯金字塔運(yùn)動(dòng)放大處理:
(1)視頻輸入。
(2)拉普拉斯金字塔分解:將輸入的振動(dòng)結(jié)構(gòu)視頻進(jìn)行拉普拉斯金字塔多分辨率分解,以降低圖像分辨率,提高算法處理速度。
(3)里斯變換:將分解后的每一個(gè)子帶進(jìn)行里斯變換,這里我們通過(guò)Riesz分量來(lái)計(jì)算子帶的90度相移值,然后根據(jù)得到的正交對(duì)來(lái)計(jì)算相位。
(4)時(shí)域?yàn)V波:將產(chǎn)生的帶有幅值和相位的信號(hào)經(jīng)過(guò)巴特沃斯濾波器分別時(shí)域?yàn)V波3~4 Hz,18~23 Hz,和56~64 Hz的頻率帶,以提取我們感興趣區(qū)域的運(yùn)動(dòng)。
(5)相位去噪:采用高斯濾波對(duì)步驟5)的結(jié)果進(jìn)行信號(hào)平滑,提高信號(hào)信噪比 (SNR)。
(6)放大:以20倍的放大因子放大3~4 Hz頻率帶的相位信號(hào);以50倍的放大因子放大18~23 Hz頻率帶的相位信號(hào),以100倍的放大因子放大56~64 Hz頻率帶的相位信號(hào)。即放大我們感興趣區(qū)域的運(yùn)動(dòng)信號(hào)。
(7)視頻重建:放大后的信號(hào)再經(jīng)過(guò)金字塔反變換,重構(gòu)到原視頻。運(yùn)動(dòng)放大處理后結(jié)果如圖8所示, (a)、(b)、(c) 分別對(duì)應(yīng)頻率帶為3~4 Hz,18~23 Hz,56~64 Hz的運(yùn)動(dòng)放大的視頻截圖。
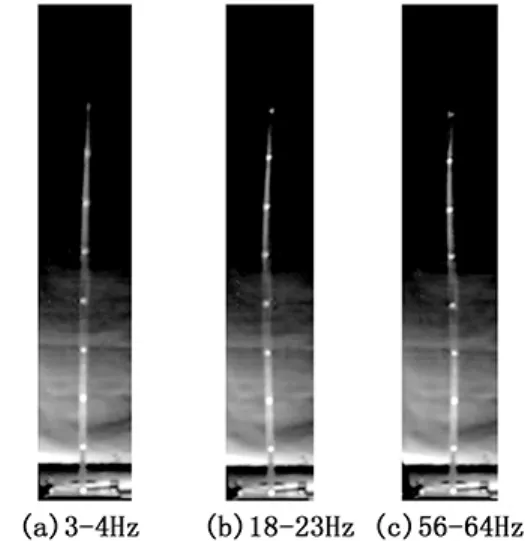
圖8 運(yùn)動(dòng)放大后的視頻截圖
4)邊緣提取:提取運(yùn)動(dòng)放大后結(jié)構(gòu)撓度最大的一幀,采用精確亞像素邊緣提取算法對(duì)圖8進(jìn)行邊緣提取。圖9為最終提取的振動(dòng)結(jié)構(gòu)的模態(tài)振型。

圖9 亞像素邊緣提取的前三階模態(tài)振型
2.4 結(jié)果與分析
通過(guò)以上研究可知,建立振動(dòng)方程計(jì)算的懸臂梁理論模態(tài)參數(shù)有:懸臂梁前三階固有頻率分別為3.41 Hz,21.36 Hz和59.8 Hz,理論振型如圖3所示;加速度計(jì)測(cè)量的懸臂梁前三階模態(tài)頻率分別為3.36 Hz,20.77 Hz,和58.16 Hz,模態(tài)振型如圖5所示;基于運(yùn)動(dòng)放大的模態(tài)識(shí)別方法識(shí)別的前3階模態(tài)對(duì)應(yīng)的振型如圖9所示。將實(shí)驗(yàn)?zāi)B(tài)依據(jù)理論模態(tài)進(jìn)行模態(tài)置信準(zhǔn)則 (MAC)檢驗(yàn),見(jiàn)表1。
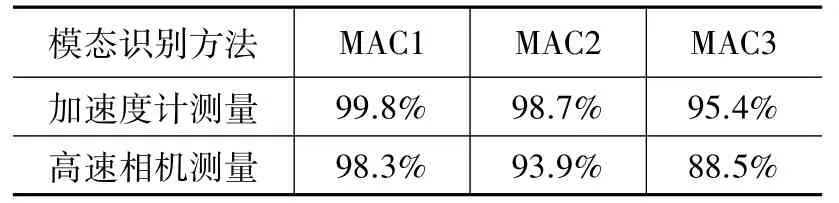
表1 加速度計(jì)和高速相機(jī)測(cè)量結(jié)果與理論模態(tài)振型的MAC值
由表1可知,加速度計(jì)測(cè)量結(jié)果與理論模態(tài)的前3階模態(tài)振型的MAC值分別為99.8%、98.7%、和95.4%;基于運(yùn)動(dòng)放大的模態(tài)識(shí)別結(jié)果與理論模態(tài)的前3階模態(tài)振型的MAC值分別為98.3%、93.9%,和88.5%。
從實(shí)驗(yàn)數(shù)據(jù)分析發(fā)現(xiàn),本文采用的基于視覺(jué)的模態(tài)識(shí)別方法識(shí)別的模態(tài)振型與理論振型最相關(guān)性可以達(dá)到98.3%,所以基于運(yùn)動(dòng)放大的模態(tài)識(shí)別技術(shù)可以用于振動(dòng)結(jié)構(gòu)的模態(tài)識(shí)別且識(shí)別結(jié)果比較準(zhǔn)確,特別是大型結(jié)構(gòu),如橋梁、高層建筑、飛機(jī)船舶等,本文研究的方法表現(xiàn)出很大的應(yīng)用優(yōu)勢(shì)。
3 結(jié)論
1)通過(guò)基于高速相機(jī)的懸臂梁振動(dòng)測(cè)量實(shí)驗(yàn),證實(shí)了基于相位的里斯金字塔運(yùn)動(dòng)放大技術(shù)可用于結(jié)構(gòu)的振動(dòng)測(cè)量,且模態(tài)識(shí)別結(jié)果比較準(zhǔn)確;
2)作為對(duì)本文方法的對(duì)比,搭建了懸臂梁的加速度計(jì)振動(dòng)測(cè)量實(shí)驗(yàn)系統(tǒng),比較發(fā)現(xiàn):本文的視覺(jué)測(cè)量方法簡(jiǎn)單易操作,而且不需要依賴(lài)昂貴的測(cè)振系統(tǒng)。另外,對(duì)于加速度計(jì)無(wú)法實(shí)現(xiàn)的微小結(jié)構(gòu)或遠(yuǎn)距離的振動(dòng)測(cè)量,本文方法均可測(cè)量;
3)相比其他的視覺(jué)模態(tài)識(shí)別技術(shù),本文提出的振動(dòng)參數(shù)識(shí)別技術(shù)可在不提取位移的情況下直接展示振動(dòng)結(jié)構(gòu)的模態(tài)振型,因此大大提高了振動(dòng)測(cè)量的效率。
4)本文提出的模態(tài)識(shí)別技術(shù)對(duì)于測(cè)量物體所處的光照環(huán)境要求較高,但如果選擇合適的光源或在室外陽(yáng)光充足的情況下該技術(shù)同樣適用。
5)對(duì)于具有復(fù)雜幾何結(jié)構(gòu)、接近耦合模態(tài),以及相機(jī)晃動(dòng)的情況的測(cè)量,本文提出的模態(tài)識(shí)別技術(shù)還有待進(jìn)一步研究和改進(jìn)。
猜你喜歡
科學(xué)大眾(2023年17期)2023-10-26 07:39:14
天天愛(ài)科學(xué)(2020年6期)2020-09-10 07:22:44
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年9期)2019-11-25 07:33:02
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2019年3期)2019-04-25 06:20:54
中學(xué)生數(shù)理化·八年級(jí)物理人教版(2018年3期)2018-05-31 08:52:45
數(shù)學(xué)物理學(xué)報(bào)(2017年6期)2018-01-22 02:26:40
少兒科學(xué)周刊·兒童版(2016年1期)2016-03-14 03:52:21
湖北經(jīng)濟(jì)學(xué)院學(xué)報(bào)·人文社科版(2015年8期)2015-12-29 05:53:07
上海電機(jī)學(xué)院學(xué)報(bào)(2015年4期)2015-02-28 14:30:00
計(jì)算物理(2014年2期)2014-03-11 17:01:44
