
基于樹莓派的無人值守信息處理系統
2018-09-19 09:41:06羅順元李志強馬文顥
計算機測量與控制 2018年9期
關鍵詞:系統
羅順元,李志強,馬文顥
(哈爾濱工程大學信息與通信工程學院,哈爾濱 150001)
0 引言
隨著畜牧養殖產業的規模化、集約化,使得畜牧業生產廠家對畜禽舍環境調控設備的需求量急劇增加。我國的養豬業生產水平和國外發達國家相比還比較落后,其中豬舍或豬場的環境問題是導致我國養豬業生產力水平低下的重要限制因素。豬舍環境是一個多變量、大慣性、非線性系統,并且存在耦合,延時等現象,傳統方法在豬舍的環境調控中,環境因素之間缺乏有機的聯系,調控系統的設計多不完善,難以適應現代化管理的要求。
近些年來,伴隨著傳感器與處理器技術蓬勃發展,各式各樣的傳感器被應用于多種領域。高精度測量傳感器的廣泛應用使得環境測控系統也取得了迅速的發展。嵌入式系統方面,由英國慈善組織“Raspberry Pi基金會”開發的樹莓派微型主板自問世以來以其強大的功能和小巧的體積備受開發者青睞,這款基于ARM的微型主板幾乎具備了個人計算機所有的基礎功能為低成本硬件應用系統的開發提供了可能。軟件方面,數字圖像處理技術在許多領域已得到廣泛的應用。隨著計算機技術和人工智能、思維科學研究的迅速發展,數字圖像處理向更高、更深層次發展。人們已開始研究如何用計算機系統解釋圖像,實現類似人類視覺系統理解外部世界,這為通過圖像識別的方法進行區域無人化監管提供了可能。
綜合上述條件,為解決當前國內養豬場成本投入高,硬件鋪設困難的問題,結合樹莓派開發技術,設計并實現了一種無人值守信息處理系統,以滿足對大型豬舍環境管理的需求。
1 系統總體設計
本系統主要應用于大型養豬場,設計的關鍵在于對環境變量的準確監測和對硬件成本的把控。整體系統可以分為數據采集與處理、數據傳輸和移動平臺3個部分。所采集的環境變量主要為溫度、濕度、空氣質量、聲音以及圖像信息。系統中傳感器獨立外接與中央控制器,各傳感器獨立工作,采集的數據信息通過物理連接傳入樹莓派,樹莓派將采集到的數據進行處理,并做出相應的響應。處理完畢的數據通過物理連接直接顯示于本地顯示設備,同時數據通過WiFi傳輸協議上傳至遠程監控端,生成運行日志。監控端由一塊樹莓派搭建而成。系統總體設計框圖如圖1所示。

圖1 系統總體設計框圖
2 硬件系統
本系統的硬件部分主要包括核心控制模塊,多種傳感器模塊,聲音采集模塊,圖像采集模塊,移動平臺,報警模塊,WiFi模塊,顯示模塊,供電模塊和遠程監控端等。
2.1 核心控制模塊
核心控制模塊是整個系統的核心部件,承擔著驅動傳感器、接收數據信息、處理信息的中央任務。考慮到成本和技術要求,采用樹莓派3B作為核心控制模塊。樹莓派是當前應用廣泛的控制平臺之一,它是基于ARM的微型電腦主板,幾乎具備傳統PC的所有基本功能。樹莓派具有豐富的GPIO接口,支持諸如I2C協議,SPI協議,串口通信協議等主流信息傳輸協議,能夠同時掛載多種器件。對于需要掛載在同一針腳的不同器件,可采用時分復用的方式,不同時刻分別驅動不同器件,這樣有效解決控制器IO資源分配的問題。
2.2 傳感器模塊
傳感器模塊主要用于對環境變量的監測,并將數據傳送至核心控制模塊進行處理與傳輸。
2.2.1 溫濕度傳感器模塊
本系統選用AM2302溫濕度傳感器進行溫濕度信息的采集。AM2302是一款含有已校準數字信號輸出的溫濕度符合傳感器,擁有極高的可靠性與卓越的長期穩定性,具有響應快,抗干擾能力強,性價比高等優點。AM2302溫濕度傳感器模塊與樹莓派以單總線的方式連接,僅占用一個GPIO接口。供電可直接與樹莓派供電口并聯,無需外接電路。
2.2.2 煙霧傳感器模塊
采用MQ-135空氣污染監測傳感器作為空氣指數采集設備。該傳感器對氨氣、硫化物、苯系蒸氣的靈敏度極高,具有壽命長,低成本,驅動簡單等優點廣泛應用于氣體檢測領域。MQ-135空氣污染監測傳感器配備預熱電路,通過感應模塊電阻值的變化反饋環境信息。MQ-135模擬輸出與A/D轉換器PCF8591連接。PCF8591掛載在樹莓派的I2C總線上,樹莓派能夠通過尋址獲取信息。
2.2.3 聲音采集模塊
樹莓派板載USB口資源,采用樹莓派外接USB聲卡配合3.5 mm接口麥克風進行聲音采集,確保設備能夠保證以標準采樣頻率44100 Hz進行錄音。
2.2.4 圖像采集模塊
選用豪威科技出產的OV5647攝像頭模組該模組具有價格低廉,驅動簡單等特點。模組通過FFC軟排線與樹莓派預留的攝像頭接口直接相連,能夠完成實時采集圖像的任務。
2.2.5 顯示模塊
顯示模塊選用微雪出品的4.2inch墨水屏模塊。相較于LCD顯示設備,墨水屏具有功耗低,視角寬,顯示清晰,掉電保持等特點,十分適用于豬舍環境的顯示應用。墨水屏與樹莓派通過SPI總線相連,接收樹莓派顯示指令。
2.2.6 WiFi模塊
樹莓派主板具有板載WiFi模塊,通過pythonsocket編程可完成雙機數據的互傳工作。可實現本地數據上傳至遠程監控端。
2.2.7 報警模塊
報警模塊采用WT588D語音芯片模塊Pulse Width Modulation(PWM)輸出直接驅動0.5W/8Ω揚聲器。該語音芯片模塊帶SPI-Flash,可提前錄制并存儲多段不同的WAV格式報警信號音頻,以便在不同的報警需求下播放相應的報警信號。
2.2.8 供電模塊
系統供電采用電池供電,所選電池為航模鋰電池,后級配合3個7805系列穩壓芯片并聯,進行穩壓輸出。單片7805穩壓芯片理論輸出電壓5 V,最大輸出電流1.5 A,三片并聯理論輸出電壓為5 V,理論最大供電電流達4.5 A,保證了充足的電流供應。
2.2.9 移動平臺
移動平臺由四輪小車、電機驅動模塊以及陀螺儀MPU6050組成。電機驅動模塊選用LM298N雙通道電機驅動模塊,通過樹莓派GPIO進行模擬占空比50%,50Hz的PWM輸出,從而對移動平臺進行調速。轉向部分,通過改變小車舵機控制信號的占空比可以調節舵機轉動,實現小車轉向。四輪小車中心固定有陀螺儀,能夠回傳小車運行時在空間坐標系中的位置信息,系統依據陀螺儀回傳數據能夠進行方向控制,重心調整等動作,保證小車運行穩定。
(1) 添加生物炭可以改變土壤容重、飽和含水量、毛管孔隙度、田間持水量及水分蒸發量,隨生物炭含量的增加,土壤容重與飽和含水量表現出相反的趨勢,而毛管孔隙度和田間持水量則表現出相同的趨勢。
3 軟件系統
軟件系統主要包括各模塊的驅動程序,數據收發程序,數據處理算法程序以及系統響應命令程序。其主要是樹莓派端核心控制程序與數據處理程序的設計。
3.1 樹莓派端功能的實現
樹莓派微型主板在上電后主要完成各個模塊的初始化,等待開始信號后,控制數據采集模塊進行數據的收集工作,將所收集的數據進行處理并顯示,并通過WiFi模塊上傳至上位機 (PC)。預設監測豬欄數為十個。其程序流程圖如圖2所示。
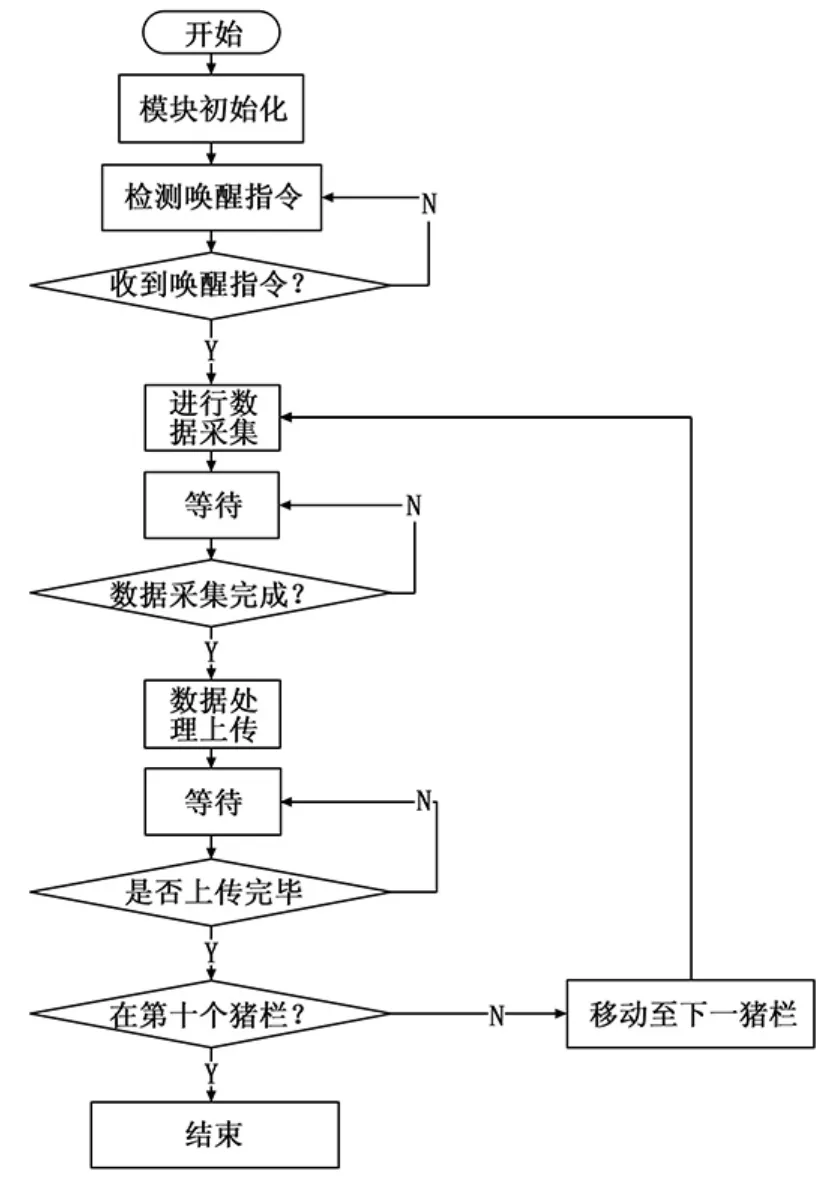
圖2 樹莓派端程序流程圖
3.2 環境變量數據處理程序設計
傳感器將所采集的環境變量信息通過數據總線上傳至樹莓派。樹莓派對所得數據進行可信度判斷后,寫入運行日志。數據處理程序讀取運行日志中數據,進行數據融合操作,評估程序結合所得的融合結果通過查表的方式對當前環境是否適宜豬只生長做出判斷。環境變量數據流如圖3所示。

圖3 環境變量數據融合過程
現實環境中,環境變量在一定時間內變化的幅度應符合基本物理原理,因此數據預處理部分采用前向比對法,將所得數據與前向可信數據進行比對,判斷突變系數,若突變系數不符合現實情況,則說明當前數據為不可信數據,進行舍棄。例如常態下,環境溫度值由常溫在1秒內上升1倍,即為不可能事件,所得數據為不可信數據。
樹莓派將一段時間內的某傳感器所有的可信數據樣本求取均值即得到該傳感器環境變量真值,此真值用于數據融合以及判定是否進行溫度調節,濕度調節等操作。
數據融合部分采用線性融合方式,所涉及變量為溫度,濕度。首先將環境變量進行歸一化得到量綱相同的環境變量值,歸一化標準為溫度為20℃,濕度為70%。基于畜牧領域專業資料得到豬只生長環境判定中,各變量的權重值,得到模糊融合公式

式中S為融合指標值,T為歸一化溫度,H為歸一化濕度,均無量綱。通過溫濕度適宜度利用查表法得到模糊評估結果。模糊評估標準對照表如表1所示,表中數據選取成長期種豬為參考對象。采用優先級查表方式,例如當前數據若滿足“舒適”判定,則比對結束,不再向下比對。

表1 模糊評估法評估標準對照表
3.3 圖像處理算法
攝像頭所捕捉到的圖像為RGB格式,即每幅圖像由R,G,B3個通道組成,3個通道不同取值的疊加得到彩色的便于觀看的圖像。因此對圖像進行通道分離后,不同通道分離結果分別具有原圖像的一部分噪聲信息,由于分離后的圖像只有單個通道,在噪聲去除方面可以得到更好的效果,對去噪后的單通道圖像進行特征點的抓取,得到的結果進行通道合成,一定程度上能夠提升特征提取結果的準確性。
3.4 聲音處理算法
常態下家豬發出的聲音能量主要集中于低頻段,低頻段聲音頻譜幅度分布可以體現家豬的喜怒哀懼等情緒,當遭遇險情時,家豬發出的聲音能量集中于中高頻段,中高頻段聲音頻譜幅度分布可以體現某些危險情況,如豬只受傷,外來入侵等,因此通過對于聲音幅度的監測一定程度上可以體現當前豬只的狀態。
通過對樹莓派采集到的聲音信號進行采樣,并進行傅里葉變換處理,可以得到當前環境下豬舍內部的聲音頻譜,濾波后保留豬只聲音和小部分環境音,對得到的幅度譜進行監控,聲音幅度譜變化與豬只行為建立映射,以應對突發狀況。
3.5 雙機通訊
樹莓派與PC之間的通信基于網絡通信新領域使用最廣泛的通信協議之一——傳輸控制協議 (TCP協議)編寫。樹莓派端程序流程圖如圖4所示。PC端程序流程圖如圖5所示。
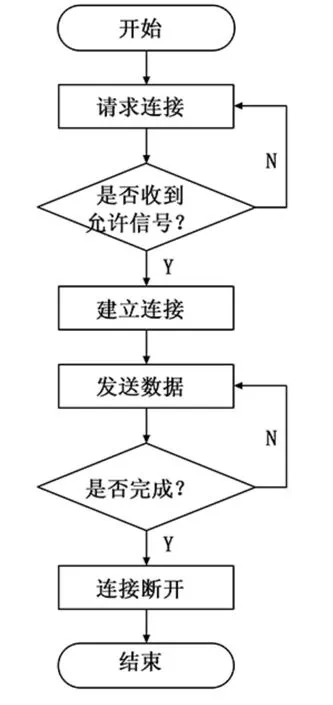
圖4 樹莓派端通信協議流程圖

圖5 PC端通信協議流程圖
程序設計分為PC端程序和樹莓派端程序,TCP通信基于套接字 (Socket)方式實現,通過建立連接和應答來保證通信質量。在物理硬件層,樹莓派通過其板載WiFi接入網絡,依靠IP地址在組網中進行尋址,通過預設的通信端口建立連接,與PC進行數據的交換。
4 系統測試
經過多次實驗,系統整合實物圖如圖6所示。
整機上電運行,系統穩定。墨水屏顯示效果如圖7所示 (該圖為某次測試結束后的顯示狀態)。
圖7中,Temp為溫度值,Humy為濕度值,AQI為空氣中煙霧濃度 (數值越高對應煙霧濃度越小),Evaluate為融合后的評估信息,T_contral為溫度控制意見,H_contral為濕度控制意見,A_contral為空氣控制意見。
在某一段連續時間內測試數據如表2所示。
由測試效果可知,系統能夠正確的采集所需要的環境變量信息并根據預設算法進行數據的處理與顯示。

圖6 系統整合實物圖

圖7 本地顯示效果圖
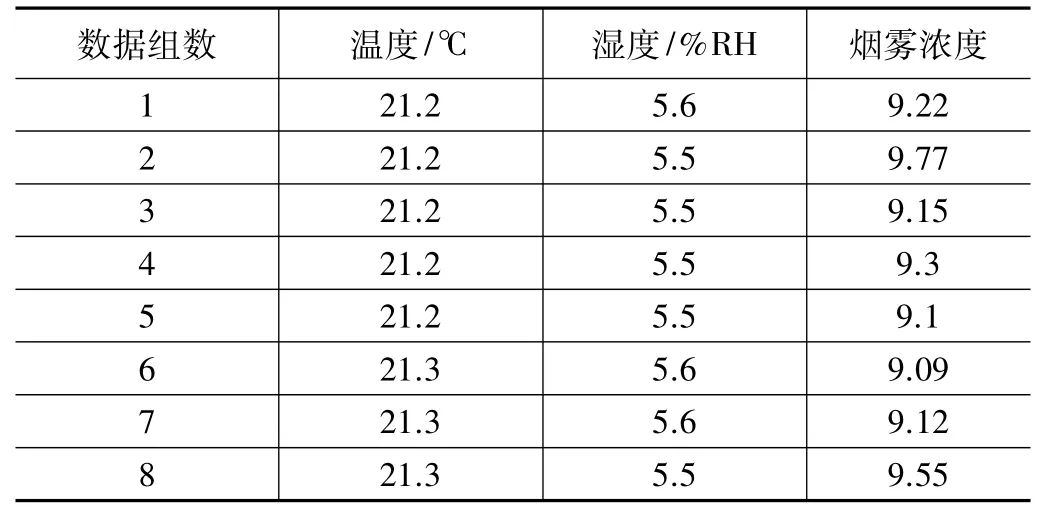
表2 實驗數據表
攝像頭采集到的圖像通過圖像處理算法后,樹莓派能夠在圖像中找到目標并在圖中標記,并將結果圖像傳送至PC。圖8為拍攝到相鄰兩個欄的豬經處理后回傳的圖像。

圖8 PC端得到的圖像
圖像中的網格狀陰影為豬欄,兩側黑色陰影為墻壁,兩個灰色陰影區域為實際豬只輪廓。左側為豬正常站立狀態,在圖像中呈現一個類橢圓形陰影;右側是豬轉身狀態,豬的頭部向右側偏轉,圖像中呈現一個不規則陰影,通過與預設特征進行比對,得到豬只當前為轉身動作的判斷。
PC端接收到聲音頻譜圖如圖9所示。

圖9 聲音譜分析
圖9中上下兩部分分別是常態下豬發出的聲音和豬發怒時發出聲音的頻率譜。從頻譜上看,聲音能量集中于低頻段,說明沒有出現危急狀況。正常狀態下,豬發出聲音在0~15 kHz頻率段內,幅度分布相對均勻,沒有出現能量集中現象;當豬發怒時發出低沉的聲音,聲音的幅度主要集中于500 Hz以下,系統可以根據不同的幅度分布做出不同的判斷。
5 結束語
經實驗應用,本系統運行穩定,能夠完成預期功能。測試結果表明:系統能夠收集所需信息并進行數據處理、分析和上傳等工作,可在現代化豬場中發揮作用,大大降低人力和物力的消耗,從而降低生產成本。由于樹莓派的可擴展性和可編程性,用戶還可以根據需要自行進行模塊的增減和算法的調整,以適應不同領域的需求。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
