
含零漂的遙測加速度振動信號時域積分方法研究
2018-09-19 09:41:14王萬金張志國徐洪洲
計算機測量與控制 2018年9期
王萬金,張志國,徐洪洲
(中國人民解放軍92124部隊,遼寧大連 116023)
0 引言
飛行器結(jié)構(gòu)設(shè)計的改進和試驗工作評價很大程度上依托于試驗數(shù)據(jù)的采集,合理布置無線傳感器對結(jié)構(gòu)的振動情況進行測量獲取加速度振動信號是飛行器飛行試驗重要的組成部分。無線傳感器受溫度變化、電源電壓不穩(wěn)定等因素的影響從而導(dǎo)致輸出端電壓會偏離初始值而上下飄動,即零點漂移 (簡稱零漂),盡管傳感器在信號采集過程中進行了消噪,但在采集的加速度振動信號中仍然可能存在一定的直流分量,在基于加速度振動信號積分獲取速度和位移振動信號過程中會產(chǎn)生一次和二次趨勢項,這將影響積分后的速度和位移振動信號精度,導(dǎo)致信號失真,無法真實反映飛行器飛行過程的實際狀況,不利于飛行器飛行試驗結(jié)構(gòu)健康狀況的鑒定。目前,飛行器飛行試驗數(shù)據(jù)處理過程中,對采集的加速度振動信號主要采用整體去零漂的方式進行處理,即統(tǒng)計信號特征段落的均值,認為其是信號中包含的零漂直流分量,將其從信號中剔除從而獲得真實的加速度振動信號。受各種條件影響,雙向 (正負)無線傳感器采集的加速度振動信號往往不完全對稱,即局部點處的信號均值去除零漂影響后可能非零。因此,采用目前方法去零漂難以真正消除其對信號后續(xù)處理結(jié)果精度的影響。本文致力于尋求更為可行的方式提高零漂存在情況下通過加速度振動信號積分提取速度和位移振動信號的結(jié)果精度。
1 含零漂的加速度振動信號時域積分
飛行器飛行試驗過程采集的遙測振動信號a(i)+μ(i=1,2,…n)為離散加速度信號,假定其包含零漂直流分量μ項,為求取該振動信號對應(yīng)的時域離散速度振動信號珓v(i)(i=1,2,…n-1),需對其進行一次數(shù)值積分,積分結(jié)果為含有趨勢項的速度振動信號估計值:

其中,fs為采樣頻率,Rk為積分誤差。
可以證明在高采樣的情況下,針對上述歸納結(jié)果其一次積分誤差對積分結(jié)果的影響可以忽略。為便于后續(xù)推導(dǎo)過程,此處暫舍棄梯形法時域數(shù)值積分過程中的誤差,令1)μ/fs,則含趨勢項的速度振動信號估計值v珓(n-1)可以通過v珓~(n-1)來估計,即:

同上,可以證明在高采樣的情況下,針對上述歸納結(jié)果其二次積分誤差Qn-2對積分結(jié)果的影響可以忽略。此處舍棄梯形法時域數(shù)值積分過程中的誤差Qn-2,令(n-2)=珓則含趨勢項的位移振動信號估計值珓s(n-2),可以(n-2)通過來估計,即:

上述數(shù)值積分過程中,速度和位移振動信號離散值估計時,我們只考慮理想情況下即速度初值珓(0)和位移初值(0)均為零的情況。在飛行器飛行試驗實際過程當中,速度初值珓v(0)和位移初值珓(0)很可能不全為零,因此應(yīng)該進一步考慮更普遍的情況,即當(0)≠0時,此時速度振動信號的估計值為珓v(n-1)=(n-1)+珓(0),對加速度振動信號a(i)+μ(i=1,2,…n)進行一次數(shù)值積分后的一次趨勢項則變?yōu)?


對于 (5)式和 (6)式,可以采用最小二乘法通過多項式擬合的方法,獲取更普遍意義下的速度和位移振動信號離散值估計過程中一次和二次趨勢項中的待定值,即通過對 (5)式進行一次多項式擬合,可以獲取,通過對 (6)式進行二次多項式擬合可以獲取。
通過上述估計,我們可以在此基礎(chǔ)上對加速度、速度和位移振動信號的離散值進行修正,即:

2 仿真信號分析
為了驗證上述算法理論推導(dǎo)的正確性和在振動信號速度和位移離散值估計過程中的有效性,本節(jié)我們采用仿真振動信號對其進行驗證。此處假定仿真加速度振動信號為-(2pi10)^2sin(2pi10t)-(2pi50)^2sin(2pi50t)-(2pi100)^2sin(2pi100t),零漂直流分量為7.4e+003,采樣頻率為5000Hz,采樣數(shù)據(jù)長度n為1024。該仿真加速度振動信號在0至0.2s區(qū)間的時域歷程如圖1所示,可以看出其物理幅值關(guān)于零軸并不嚴格對稱,其對應(yīng)的速度振動信號2pi10cos(2pi10t)+2pi50cos(2pi50t)+2pi100cos(2pi100t)在0至0.2s區(qū)間的時域歷程如圖4所示,對應(yīng)的位移振動信號sin(2pi10t)+sin(2pi50t)+sin(2pi100t)在0至0.2s區(qū)間的時域歷程如圖7所示。
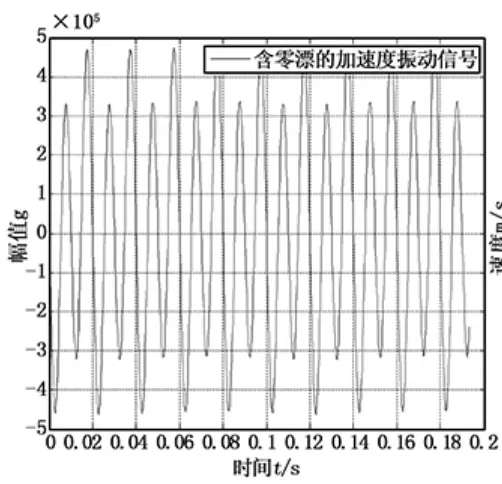
圖1 含零漂的加速度振動信號
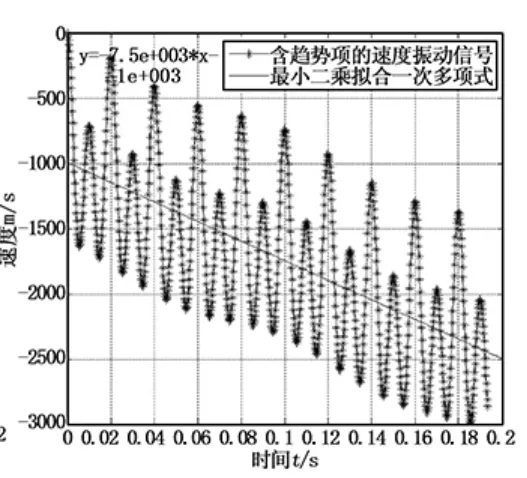
圖2 含趨勢項的速度振動信號 估計值和一次擬合多項式
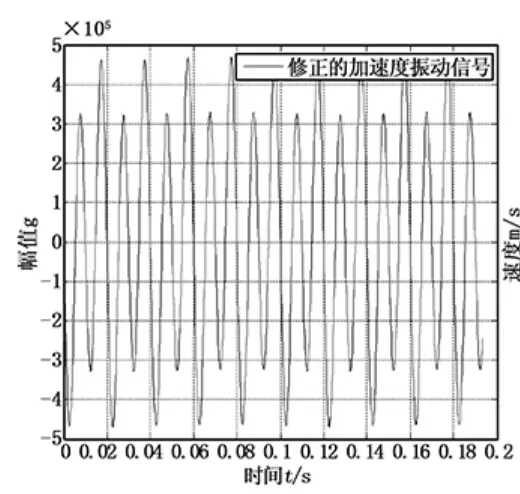
圖3 修正的加速度振動信號
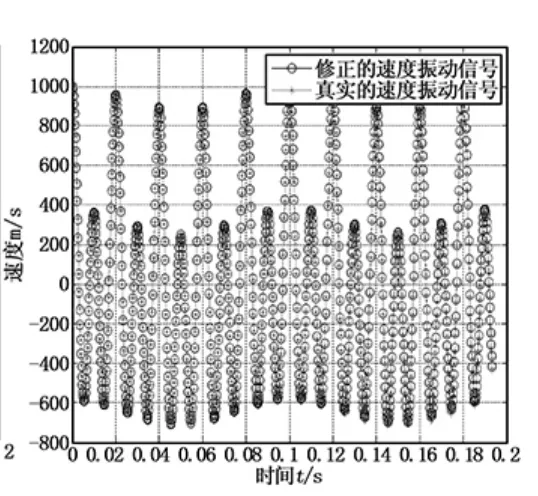
圖4 修正的和真實的速度 振動信號
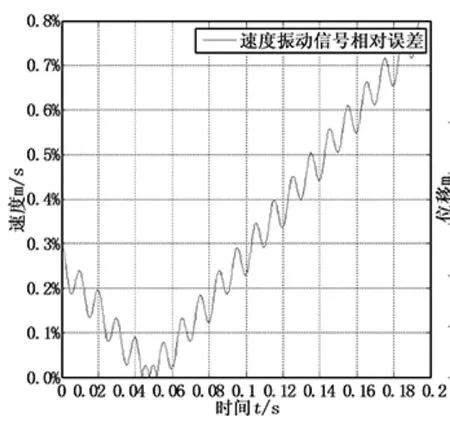
圖5 速度振動信號相對誤差

圖6 含趨勢項的位移振動信號 估計值和二次擬合多項式
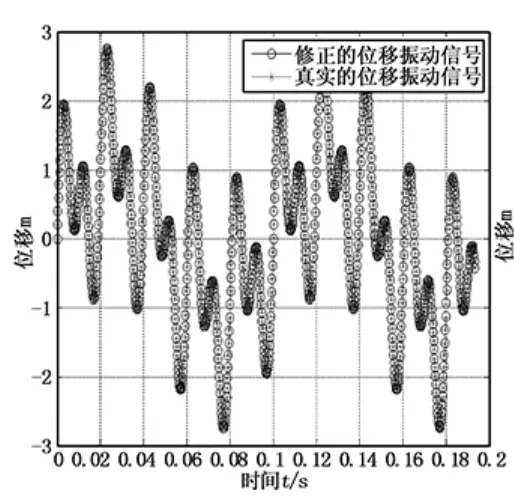
圖7 修正的和真實的位移振動信號

圖8 位移振動信號 相對誤差
針對上述如圖1所示的含零漂的仿真加速度振動信號,通過1節(jié)的式 (2)可以求得其如圖2所示的速度估計值。觀察圖2可以發(fā)現(xiàn)其中含有一次趨勢項,此處采用最小二乘法對其進行一次多項式擬合,通過擬合結(jié)果可以獲取零漂直流分量估計值和速度初值估計值。在此基礎(chǔ)上,分別對仿真加速度和速度振動信號進行修正,修正后的仿真加速度振動信號如圖3所示,修正后的仿真速度振動信號和真實的速度振動信號如圖4所示,速度修正值和真實值間的相對誤差如圖5所示,由圖5不難發(fā)現(xiàn)相對誤差在0~0.8%區(qū)間內(nèi),說明采用式 (8)的速度振動信號修正方法是正確且有效地,能夠通過該方法對含零漂的加速度振動信號一次積分獲取的速度振動信號進行修正,結(jié)果精度較高。
針對上述如圖3所示修正后的仿真加速度振動信號,根據(jù)式 (4)可以求得其如圖6所示的位移振動信號估計值,觀察圖6可以發(fā)現(xiàn)其中含有二次趨勢項,采用最小二乘法對其進行二次多項式擬合,獲取位移初值估計值,根據(jù)式 (9)對位移振動信號進行修正,修正后的位移振動信號和真實位移振動信號如圖7所示,位移修正值和真實值間的相對誤差如圖8所示,由圖8不難發(fā)現(xiàn)相對誤差在0~0.33%區(qū)間內(nèi),說明采用式 (9)的位移振動信號修正方法是正確且有效地,能夠通過該方法對含零漂的加速度振動信號二次積分獲取的位移振動信號進行修正,結(jié)果精度較高。
3 實測信號分析
圖9為飛行器某次飛行試驗采集的含零漂的遙測加速度振動信號,采樣頻率為5 000 Hz,采樣數(shù)據(jù)長度為252。該信號為瞬態(tài)振動信號,盡管飛行器飛行試驗過程中采用了高靈敏度雙向振動傳感器對振動信號進行采集和消噪,但受飛行環(huán)境的影響以及其激勵源和飛行器自身結(jié)構(gòu)的復(fù)雜性,導(dǎo)致該瞬態(tài)信號波形復(fù)雜、周期性不強,且幅值關(guān)于零軸不嚴格對稱,含有零漂項,采用傳統(tǒng)簡單的均值去零漂方式難以奏效,進一步通過一次和二次積分獲取的速度和位移振動信號不能夠真正體現(xiàn)信號的真實特征,這對飛行器飛行試驗后續(xù)的分析鑒定工作帶來不可控的風險。鑒于上節(jié)通過仿真振動信號對上述方法模型正確性和有效性的檢驗結(jié)果,我么可以大膽推斷其在飛行器飛行試驗含零漂的加速度振動信號速度和位移數(shù)值積分中的可行性和可靠性。此處我們以飛行器飛行試驗采集到的含零漂的遙測加速度振動信號如圖9為例,通過1節(jié)所推導(dǎo)算法對速度和位移振動信號進行提取。結(jié)果如圖10至圖14所示。

圖9 含零漂的遙測加速度振動信號

圖10 含趨勢項的遙測速度 振動信號和一次擬合多項式
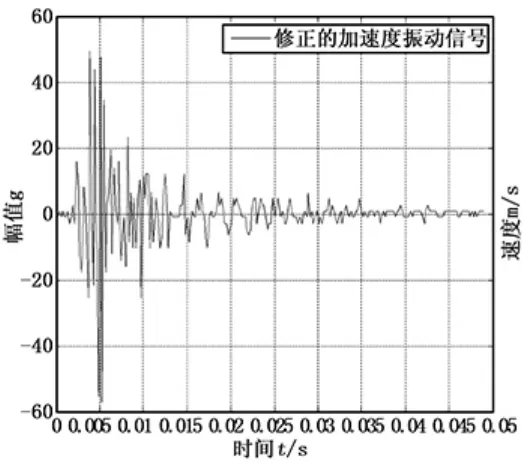
圖11 修正的遙測加速度振動信號

圖12 修正的遙測速度 振動信號
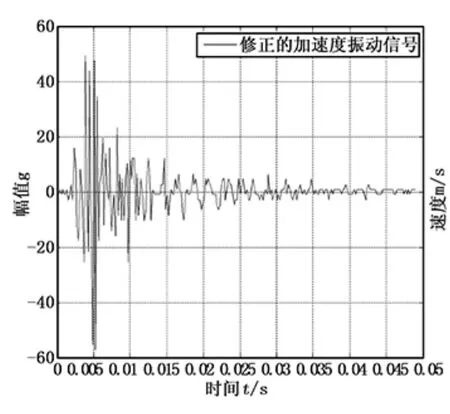
圖13 含趨勢項的遙測位移振動信號和二次擬合多項式
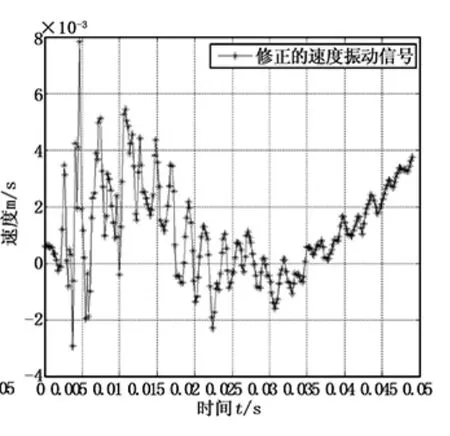
圖14 修正的遙測位移 振動信號
針對如圖9所示的含零漂的遙測加速度振動信號,根據(jù)1節(jié)式 (2)可以求得其如圖10所示的速度振動信號估計值,觀察圖10不難發(fā)現(xiàn)其中含有一次趨勢項,采用最小二乘法對其進行一次多項式擬合,獲取零漂直流分量估計值和速度初值估計值,根據(jù)式 (7)和式 (8)分別對加速度和速度振動信號進行修正,修正后的加速度和速度振動信號如圖11和圖12所示。
針對如圖11所示修正后加速度振動信號,根據(jù)1節(jié)式(4)可以求得其如圖13所示的位移振動信號估計值,觀察圖13不難發(fā)現(xiàn)其中含有二次趨勢項,采用最小二乘法對其進行二次多項式擬合,獲取位移初值估計值,根據(jù)式 (9)對位移振動信號進行修正,修正后的位移振動信號如圖14所示。由上節(jié)仿真信號的驗證結(jié)果可知圖13和圖14所示的速度和位移振動信號修正結(jié)果置信度是較高地,給飛行器飛行試驗結(jié)構(gòu)健康診斷提供較為可靠的參考信息。
4 結(jié)論
飛行器飛行試驗過程中無線傳感器易受溫度變化、電源電壓不穩(wěn)定等因素的影響在信號輸出過程中產(chǎn)生直流分量,從而導(dǎo)致采集的遙測加速度振動信號中含有零漂,盡管傳感器在信號采集過程中進行了消噪,但在采集的加速度振動信號中仍然可能存在一定的直流分量,在利用其積分獲取速度和位移振動信號過程中會產(chǎn)生一次和二次趨勢項,嚴重影響積分結(jié)果的精度。文中提出通過遙測加速度振動信號時域數(shù)值積分和最小二乘相結(jié)合的方法,采用最小二乘原則對加速度振動信號時域數(shù)值積分結(jié)果根據(jù)其包含的趨勢項形式進行多項式擬合,獲得修正參數(shù),進一步對積分結(jié)果進行修正,獲取遙測速度和位移振動信號的修正值。該方法在仿真信號上進行了應(yīng)用,修正結(jié)果和真實結(jié)果的誤差較小,結(jié)果精度較高,說明方法的正確性和有效性。在此基礎(chǔ)上,將方法在遙測加速度振動信號的處理上進行了應(yīng)用,鑒于方法模型的在仿真信號上的有效性,可以推斷獲取的速度和位移振動信號的修正結(jié)果具有較高的置信度,在飛行器飛行試驗結(jié)構(gòu)健康診斷方面具有重要意義。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
艦船科學技術(shù)(2022年8期)2022-06-05 07:36:28
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
瘋狂英語·新讀寫(2020年3期)2020-06-06 09:05:56
中國生殖健康(2019年3期)2019-02-01 06:12:26
中國公路(2017年18期)2018-01-23 03:00:38
數(shù)學物理學報(2017年6期)2018-01-22 02:26:40
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
