基于PSO優化的模糊神經網絡的直接轉矩控制
2018-10-12 05:48:38劉云飛李兵姚明林
現代電子技術 2018年19期
關鍵詞:永磁同步電機
劉云飛 李兵 姚明林
摘 要: 為了克服傳統直接轉矩控制(DTC)轉矩和磁鏈脈動大的缺點,提出一種T?S模型與神經網絡控制相結合的控制方法,將其引入傳統DTC中,該方法融合模糊邏輯容易表達人類知識和神經網絡自適應學習能力強的特點,能夠有效減小轉矩和磁鏈脈動,提高系統的穩定性。仿真結果表明,與傳統DTC對比,轉矩和磁鏈脈動顯著減小,具有良好的穩態性能。
關鍵詞: 永磁同步電機; T?S模型; 模糊神經網絡; 直接轉矩控制; BP算法; PSO算法
中圖分類號: TN876?34; TM351 文獻標識碼: A 文章編號: 1004?373X(2018)19?0117?04
Abstract: A control method combining T?S model with neural network control is proposed to reduce the torque and flux linkage ripple of the traditional direct torque control (DTC), and is introduced into the traditional DTC. The characteristics of easy human knowledge expression and strong neural network adaptive learning ability are fused in the method to reduce the torque and flux linkage ripple effectively, and improve the system stability. The simulation results show that, in comparison with traditional DTC, the torque and flux linkage ripple obtained by the proposed method are reduced significantly, and the proposed method has higher steady?state performance.
Keywords: permanent magnet synchronous motor; T?S model; fuzzy neural network; direct torque control; BP algorithm; PSO algorithm
0 引 言
在需要變速的高性能電機調速中,直流電機由于其結構簡單,性能優異,一直占據主導地位。但是,其結構上存在的換向器和電刷造價昂貴,維護困難,給電機控制工作帶來了諸多不便。隨著電力電子技術和微處理器的發展,交流電機逐漸進入人們的視野。其中,同步電機由于其轉子轉速和定子磁場轉速嚴格同步,能夠精準控制電機轉速,受到越來越多的關注。永磁電機轉子為永磁體,不需要額外提供勵磁電路,使得調速性能大大提高。
永磁同步電機直接轉矩控制(PMSM?DTC)于20世紀90年代由Zhong L,Rahman M F和胡育文等提出。與矢量控制不同的是,它采用[α?β]靜止坐標系,通過電機的數學模型得到定子磁鏈和轉矩,將電機和逆變器視為一個整體,利用電壓矢量控制電磁轉矩和磁鏈,無電流環[1]。因此具有控制結構簡單、響應快、對參數依賴少等優點。但是由于其采用磁鏈和轉矩雙滯環控制,且每個采樣周期內只作用單一電壓矢量[2],因而電磁轉矩和磁鏈存在較大的脈動問題。針對此問題,許多專家學者將各種控制策略結合傳統DTC進行研究,如模糊控制[3?4]、神經網絡控制[5]、預測控制[6]、滑模變結構控制[7]等,還有一些針對磁鏈觀測方面的優化算法,如卡爾曼濾波算法[8]等。
本文采用粒子群優化的模糊神經網絡控制,將粒子群算法和BP算法結合起來訓練由T?S模型建立的神經網絡,獲得較好的權值。仿真表明其轉矩和磁鏈脈動較傳統DTC明顯減小,系統性能優于傳統DTC系統。
1 T?S模型的建立
3 學習算法
粒子群優化算法(Particle Swarm Optimization,PSO)通過粒子在解空間追隨最優粒子進行搜索,算法簡單,易實現,參數調整少且收斂速度較快[9]。它是啟發于鳥類覓食行為的一種基于迭代的優化算法,每一個粒子都有其速度和飛行的方向。其中粒子代表一個可能解,搜索到的最優值代表最優解。每一個粒子在搜索時需要考慮兩個問題:一是自身搜索到的最優解;二是全部粒子搜索到的最優值。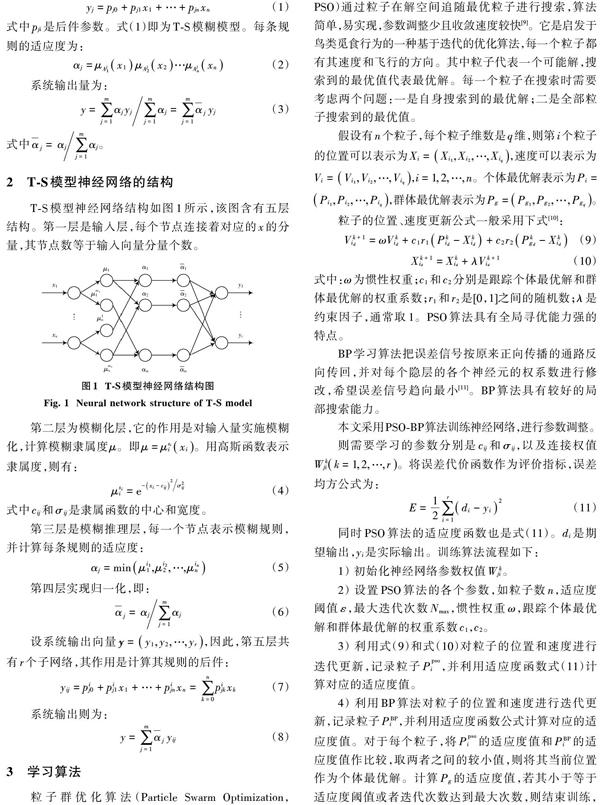
同時PSO算法的適應度函數也是式(11)。[di]是期望輸出,[yi]是實際輸出。訓練算法流程如下:
1) 初始化神經網絡參數權值[Wkji]。
2) 設置PSO算法的各個參數,如粒子數[n],適應度閾值[ε],最大迭代次數[Nmax],慣性權重[ω],跟蹤個體最優解和群體最優解的權重系數[c1],[c2]。
3) 利用式(9)和式(10)對粒子的位置和速度進行迭代更新,記錄粒子[Ppsoi],并利用適應度函數式(11)計算對應的適應度值。
4) 利用BP算法對粒子的位置和速度進行迭代更新,記錄粒子[PBPi],并利用適應度函數公式計算對應的適應度值。對于每個粒子,將[Ppsoi]的適應度值和[PBPi]的適應度值作比較,取兩者之間的較小值,則將其當前位置作為個體最優解。計算[Pg]的適應度值,若其小于等于適應度閾值或者迭代次數達到最大次數,則結束訓練,并將[Pg]對應的神經網絡權值輸出。
4 模糊控制器的設計
用模糊控制器代替滯環比較器,模糊控制器定子磁鏈誤差[Δψs],轉矩誤差[ΔTe]是輸入量,輸出量為逆變器開關作用信號。根據傳統DTC結構,其中,定子磁鏈偏差[Δψs]在[-0.01,0.01]區間內分割成為4個模糊子集[NB,NS,PS,PB]。而要減小轉矩脈動,因此將轉矩偏差[ΔTe]在[-0.1,0.1]區間內分割成為4個模糊子集[NB,NS,PS,PB],隸屬度函數均采用對稱的三角形函數。
電壓矢量(見表1)分成4種:1表示同時增大磁鏈和轉矩,2表示磁鏈降低轉矩增加,3表示轉矩變小磁鏈變大,4表示同時減小磁鏈和轉矩。輸出量為開關信號,是4個單點模糊集,本身已經清晰化,不需要解模糊。輸出的開關信號作用結合磁鏈所在扇區,選取合適的開關電壓矢量施加到逆變器上,獲得較好的性能。
5 仿真分析
對比圖可以看出,基于PSO的模糊神經網絡DTC系統轉矩和磁鏈脈動明顯減小,系統運行更加平穩,性能優于傳統DTC系統。
6 結 語
本文在傳統DTC基礎上建立T?S模型,并引入模糊神經網絡控制。其中,學習算法融合粒子群算法和BP反向誤差傳播算法,加快了學習速度。仿真表明該方法使得轉矩和磁鏈脈動減小,克服了傳統DTC系統的缺點,有效地提高了系統性能。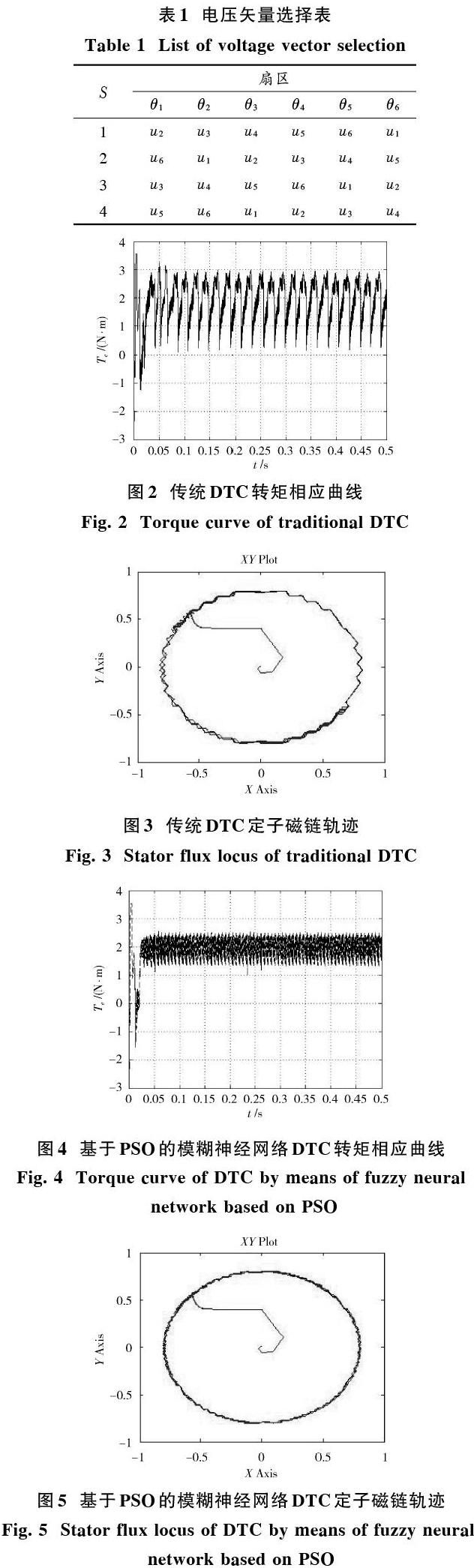
參考文獻
[1] 周揚忠,胡育文.交流電動機直接轉矩控制[M].北京:機械工業出版社,2009.
ZHOU Yangzhong, HU Yuwen. Direct torque control for AC motor [M]. Beijing: Mechanical Industry Press, 2009.
[2] 牛峰,李奎,王堯.永磁同步電機模型預測直接轉矩控制[J].電機與控制學報,2015,19(12):60?67.
NIU Feng, LI Kui, WANG Yao. Model predictive direct torque control for permanent magnet synchronous motor [J]. Journal of motor and control, 2015, 19(12): 60?67.
[3] 張春來,王亮.基于模糊控制的永磁同步電動機直接轉矩控制系統仿真[J].大連海事大學學報,2012,38(2):103?105.
ZHANG Chunlai, WANG Liang. Simulation of direct torque control system of permanent magnet synchronous motor based on fuzzy control [J]. Journal of Dalian Maritime University, 2012, 38(2): 103?105.
[4] 徐偉,屈百達,徐保國.基于模糊PID模型的無刷直流電機轉速控制[J].科學技術與工程,2010(32):7926?7929.
XU Wei, QU Baida, XU Baoguo. Speed control of brushless DC motor based on fuzzy PID model [J]. Science, technology and engineering, 2010(32): 7926?7929.
[5] 王斌.基于神經網絡的電機直接轉矩控制技術研究[D].揚州:揚州大學,2014.
WANG Bin. Research on direct torque control of motor based on neural network [D]. Yangzhou: Yangzhou University, 2014.
[6] 楊家強,黃進.基于轉矩預測的異步電機直接轉矩控制研究[J].浙江大學學報(工學版),2005(9):3?7.
YANG Jiaqiang, HUANG Jin. Research on direct torque control of induction motor based on torque prediction [J]. Journal of Zhejiang University (engineering edition), 2005(9): 3?7.
[7] 賈洪平,賀益康.永磁同步電機滑模變結構直接轉矩控制[J].電工技術學報,2006(1):1?6.
JIA Hongping, HE Yikang. Sliding mode variable structure direct torque control for permanent magnet synchronous motor [J]. Transactions of China electrotechnical society, 2006(1): 1?6.
[8] 郭子釗,佃松宜,向國菲.基于卡爾曼濾波算法的無刷直流電機直接轉矩控制[J].科學技術與工程,2016(17):49?55.
GUO Zizhao, DIAN Songyi, XIANG Guofei. Direct torque control of brushless DC motor based on Kalman filter algorithm [J]. Science, technology and engineering, 2016(17): 49?55.
[9] 王慧麗,李文卿,吳慶朝.改進粒子群優化BP神經網絡的SRM轉子位置間接檢測[J].電機與控制應用,2014,41(11):49?54.
WANG Huili, LI Wenqing, WU Qingchao. Improved particle swarm optimization BP neural network for indirect detection of SRM rotor position [J]. Motor and control applications, 2014, 41(11): 49?54.
[10] 王光明.基于PSO?BP網絡學習方法研究[D].合肥:安徽大學,2015.
WANG Guangming. Study on learning method based on PSO?BP network [D]. Hefei: Anhui University, 2015.
[11] 劉彩紅.BP神經網絡學習算法的研究[D].重慶:重慶師范大學,2008.
LIU Caihong. Study on learning algorithm of BP neural network [D]. Chongqing: Chongqing Normal University, 2008.
猜你喜歡
現代電子技術(2017年1期)2017-02-16 11:49:32
汽車工程學報(2016年5期)2017-01-16 02:42:50
計算技術與自動化(2016年4期)2017-01-11 14:06:23
電子技術與軟件工程(2016年19期)2016-12-19 18:43:28
中國科技博覽(2016年15期)2016-08-23 00:59:37
電腦知識與技術(2016年13期)2016-06-29 21:41:37
科技視界(2016年12期)2016-05-25 11:07:56
電腦知識與技術(2016年2期)2016-03-22 22:21:46
電腦知識與技術(2016年1期)2016-03-22 15:49:38
哈爾濱理工大學學報(2015年6期)2016-02-18 00:26:49
