遮蔽情況下多人體目標的探測和識別研究
2018-10-22 00:24:58薛慧君劉淼祁富貴王鵬飛史剛張自啟王健琪
中國醫療設備 2018年10期
薛慧君,劉淼,祁富貴,王鵬飛,史剛,張自啟,王健琪
空軍軍醫大學 生物醫學工程學系,陜西 西安 710032
引言
超寬帶(Ultra Wide Band,UWB)生物雷達是以生命體為探測目標并對其進行探測、跟蹤、定位以及成像的一種新興特殊雷達[1-4]。該雷達發射電磁波穿透一定厚度的非金屬介質,探測生命體呼吸、心跳等生理活動引起的體表微動,從而提取生命體的生理參數、運動軌跡等有用信息[5-6]。超寬帶生物雷達因其穿透性強、距離分辨率高等優點,被廣泛用于地震、塌方等災后救援任務[7-8]。
目前,超寬帶生物雷達對不同環境中單個人體目標探測和定位的研究已經取得了一些成果[9-12]。然而,實際災后現場中雷達探測區域往往會存在多個壓埋人員,如果壓埋人員之間出現相互遮擋,距離雷達較近的人體目標就會遮擋住部分雷達波,在其后方形成遮蔽區域,倘若其他遠端人體目標處于遮蔽區域中,由于電磁波的衰減以及前面目標的遮擋,便會造成遠端人體目標探測不到,形成漏判。對于多個人體目標的探測研究較少,吉林大學的Li等[7]使用中心頻率為2 GHz的超寬帶雷達,穿透0.2 m厚墻體探測以不同速度擺臂的無遮擋的兩個人體目標,采用快速傅立葉變換和S變換算法分析兩人體目標的時頻特性,計算出人體目標與雷達的距離。意大利博洛尼亞大學的Sobhani等[13]使用3發1收的超寬帶雷達,通過恒虛警率(Contant False Alarm Rate,CFAR)檢測器對多目標進行探測,采用基于像素法定位技術對雷達監測區域中的多個人體目標進行定位,還使用中值濾波算法降低CFAR閾值減少誤判率。該文章的發表雖為多目標探測提供新思路,但多通道技術尚不成熟,國內外生物雷達探測技術的研究還處于單通道雷達探測階段,且由于多通道雷達探測系統體積超標,實施起來較為困難,實際生命探測仍采用單通道生物雷達。本課題組也曾使用中心頻率為400 MHz超寬帶生物雷達對28 cm厚磚墻后面的多個人體目標進行探測,采用自相關系數法處理雷達回波信號,結果顯示該算法能夠識別墻后三個人體目標,當目標之間出現相互遮擋情況,容易形成漏判[14]。針對多個人體目標的探測問題雖有少部分科研院所進行過相關研究,但遮蔽情況下多人體目標的探測問題依然沒有很好的解決。
根據本課題組之前的研究可知[15-17],生物雷達對靜止人體目標進行穿墻探測時,受目標胸腹部收縮的影響,呼吸信號在雷達波傳輸路徑中始終處于固定的位置,由于電磁波在傳輸過程中(穿墻)產生衰減、目標在雷達傳輸路徑中占據一定厚度以及目標的雷達反射橫截面等因素的影響,人體呼吸信號會占據幾個固定的距離單元,這幾個距離單元的回波信號相關性很高且呈現準周期特性。根據小波變換和熵的理論知識,小波變換具有良好的時頻局部化和多尺度分辨特性,可以同時對一組信號進行時域和頻域特性分析,熵能夠表征系統狀態的復雜特性。結合二者優點,小波熵能夠精確表征非平穩信號時頻變化后不同頻段能量分布的復雜程度。由于人體信號為窄帶周期信號,小波變換后的人體目標回波信號能量主要集中在某一低頻頻段,不同尺度能量分布形式簡單,小波熵值較低。而噪聲和雜波信號經小波變換后,能量在各個尺度分布不均,小波熵值較高。本文將小波變換和熵的算法結合,對遮蔽情況下多人體目標進行識別。
1 遮蔽情況下多人體目標識別算法
1.1 信號預處理
生物雷達探測人體目標時,受探測環境和雷達自身的影響,雷達反射電磁波同時包含目標反射信號、多種噪聲以及靜態雜波。為了消除干擾保留有用信號,需要對回波信號進行預處理,預處理過程顯示于圖1中虛線框內。
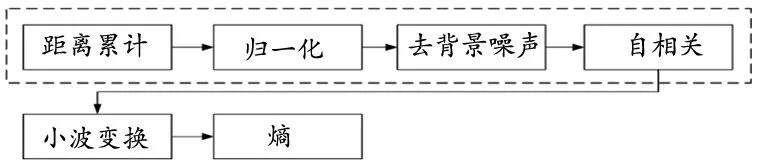
圖1 遮蔽情況下多人體目標識別算法流程圖
(1)距離累積。UWB生物雷達回波被接收天線接收,回波數據存儲在二維矩陣R(m,n)中。原始回波數據量非常大,嚴重影響后期的信號處理速度。根據人體微動信號在距離維度上臨近目標位置點處多個點信號具有很大的相關性,在不影響有用信息提取的前提下,對雷達原始回波數據R(m,n)進行距離累積,信號采樣點從2048減少到200,有效增加了信號處理的運算速度。
(2)歸一化。考慮到UWB生物雷達信號在穿透障礙物和自由空間傳輸過程中存在能量衰減,信噪比降低。在時間維度上對距離累積后的數據進行點信號的歸一化處理。可增強距離雷達較遠人體目標信號的幅度,提高回波信號的信噪比。
(3)去背景噪聲。雷達回波信號中包含了雷達天線直達波和墻體反射回波信號以及探測環境中其它靜止物體反射的靜態雜波,這些回波信號中形成很強的背景雜波,從而淹沒人體微動信號。雷達天線直達波和墻體反射的回波信號很難去除,可通過選擇信號起始位置規避天線近處的直達波干擾。靜態雜波為靜止信號,人體微動信號隨時間變化,通過平滑濾波減去不同距離點信號均值達到去除靜態雜波的目的。
(4)自相關。為了進一步增強人體信號的規律性,采用自相關算法對不同距離點的雷達回波信號進行處理,可去除UWB生物雷達系統自身在工作過程中產生的高頻噪聲,提高雷達回波的信噪比。
1.2 小波熵
此部分包含圖1遮蔽情況下多人體目標識別算法流程圖中小波變換和熵兩個步驟。假設L2(χ)為實平方可積函數空間,則對于預處理后雷達回波中不同距離點信號X(t)∈L2(χ)(X(t )(τ=1,2,...,200))的離散小波變換可表示為:ττ

式中Xτ(t)沿時間方向的采樣點 X={x0(n),n=1,…,N},ψj,k(t)為不同尺度上的小波簇。DWT輸出值為小波序列系數Cj(k),小波序列系數不僅能夠提供信號的相關信息,還能對不同尺度、不同時刻的小波能量進行估計。這樣,所有尺度上對分解后的信號進行小波重構,信號Xτ(t)可表示為:

由于小波簇{ψj,k(t)}為空間L2(χ)的正交基函數,并且其能量概念與基于傅里葉變換能量概念引出方式一致,信號Xτ(t)的小波序列系數可由信號與不同尺度小波簇的內積得出,那么對應每個尺度下的能量為:

為了觀察每個參數的瞬時變化,對雷達信號進行加窗分幀處理,設分幀的窗寬為L,每一幀i,(i=1,…,NT,NT=N/L)的采樣值為N。在二進制離散小波分解中,子帶j下的小波系數的個數應為前子帶j-1下的小波系數的一半,因此,加窗分幀的最小窗寬要保證每一子帶至少保留一個小波系數。這里每一子帶j下小波能量用該子帶下各個分幀平均能量的總和表示:

式中N(ji)為(i - 1 子)L+帶1j下每一幀i內包含的小波序列系數的個數,代表子帶j的幀數。則小波分解后不同尺度信號的總能量為:

相對小波能量在各尺度能量的分布概率為:


2 實驗結果分析
本文使用的實測數據由UWB生物雷達系統獲取,雷達系統,見圖2,雷達發射參數,見表1。考慮地震、塌方等災后救援任務的要求,生物雷達需穿透廢墟對壓埋人員進行探測,為了同時滿足雷達穿透性能和靈敏度,UWB生物雷達的中心頻率和帶寬為500 MHz。

圖2 UWB生物雷達實驗平臺
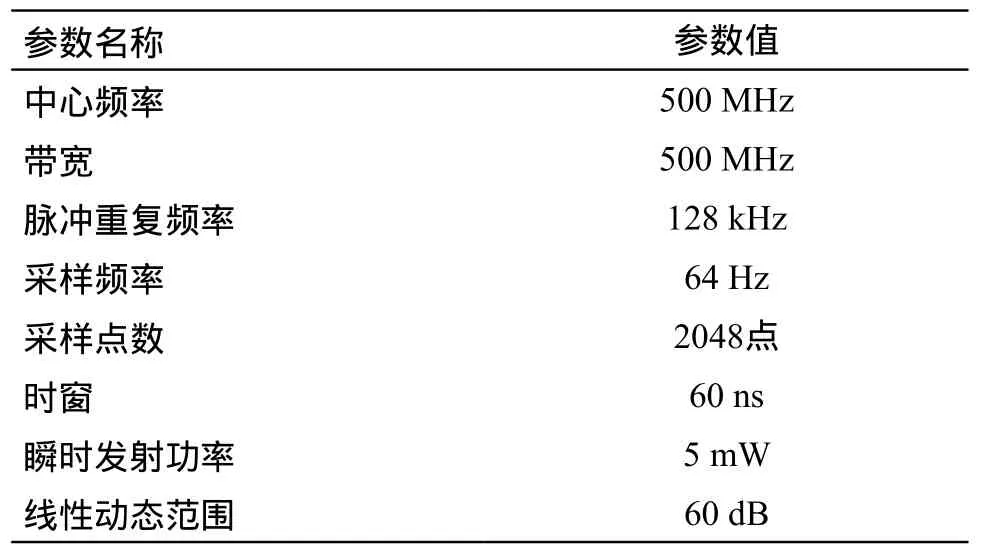
表1 UWB生物雷達系統的硬件參數
實驗場景,見圖3。UWB生物雷達進行穿墻探測實驗,磚墻厚度為28 cm,人體目標A正對雷達天線,保持正常呼吸,與雷達天線距離為3 m,目標B處于目標A的遮蔽區域,正常呼吸,距離雷達天線6 m。雷達探測區域除了人體目標,無明顯動目標干擾。采用小波熵識別算法對雷達回波信號進行處理,傳統的能量累積算法和自適應譜線增強算法作為對比研究,實驗結果,見圖4。

圖3 UWB生物雷達穿墻探測遮蔽情況下多人體目標實驗場景
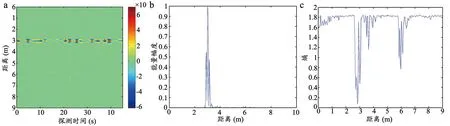
圖4 遮蔽情況下兩個人體目標的探測結果
圖4a為自適應譜線增強算法對實驗數據的處理結果,可以看出距離雷達天線3 m處存在規律性的波動信號,為進一步驗證3 m處的波動信號是否為人體呼吸回波信號,對此回波數據作快速傅里葉變換,結果顯示于圖5中,可見3 m位置所對應的頻率基本在0.35 Hz左右(紅色橢圓內部),符合人體呼吸頻率范圍,再結合先驗知識,可知距離雷達天線3 m處為人體目標A。而由于目標A的遮擋,自適應譜線增強算法無法探測到遮蔽區域的目標B。圖4b為能量累計算法的識別結果,同樣從實驗結果中只能看到距離雷達天線3 m處有一個能量譜峰,此實驗條件下能量累積算法只能探測到前面人體目標A,無法探測到遮蔽區域中的目標B。圖4c為小波熵算法對實驗數據的處理結果,從結果圖中可以觀察到在距離雷達3 m處的小波熵值很低,可判斷此位置為人體目標A,距離雷達6 m處的小波熵值也低于兩側的小波熵值,對應遮蔽區域中人體目標B所在的位置。由此可見,小波熵算法對遮蔽情況下的多個人體目標探測識別的準確度較高。
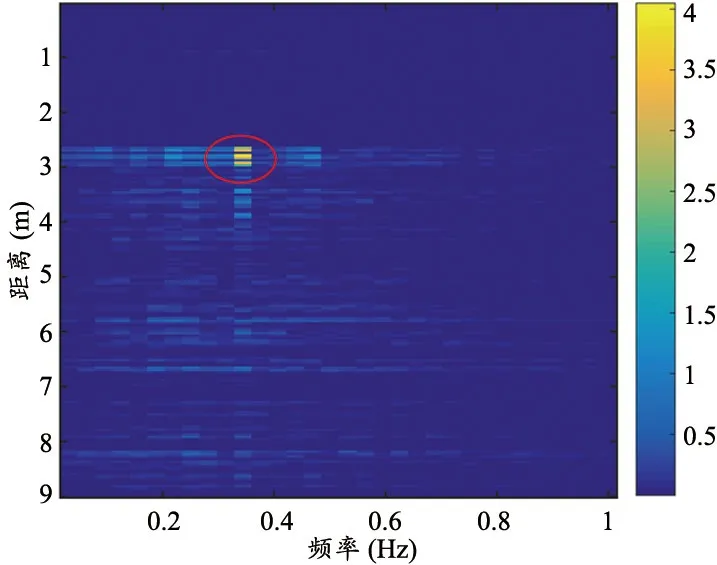
圖5 快速傅立葉分析處理的實驗結果
3 結論
本文使用中心頻率為500 MHz的UWB生物雷達系統用于廢墟下多個壓埋人體的探測研究。針對遮蔽干擾下多個人體目標的探測識別問題,首先分析了雷達遠端人體目標探測不準確的原因。基于人體呼吸信號在雷達回波距離維度上固定距離單元存在相關性,采用自相關技術在增強人體呼吸信號規律性的同時抑制環境中靜態雜波干擾。再根據小波變換和熵的理論知識,采用小波熵識別算法計算不同距離點信號小波分解后的不同尺度能量分布復雜度,通過人體目標和無人體目標點的熵值差異,對遮蔽情況下多人體目標進行識別。實驗結果證明該方法能夠識別出遮蔽區域中的人體目標,改善雷達生命探測性能。
猜你喜歡
天天愛科學(2022年9期)2022-09-15 01:12:54
天天愛科學(2022年4期)2022-05-23 12:41:48
當代水產(2022年3期)2022-04-26 14:26:56
科學大眾(2021年9期)2021-07-16 07:02:54
鴨綠江(2021年35期)2021-04-19 12:24:18
軍事文摘(2020年20期)2020-11-28 11:42:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
航空世界(2020年10期)2020-01-19 14:36:20
中國生殖健康(2019年3期)2019-02-01 06:12:26
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25