一種基于濾波響應損失的多通道合成孔徑雷達地面動目標檢測方法
2018-11-03 03:49:38萬向成李云鵬楊志偉
上海航天 2018年5期
田 敏,萬向成,陸 晴,李云鵬,楊志偉,3
(1. 西安電子科技大學 雷達信號處理國家重點實驗室,陜西 西安 710071;2. 上海衛星工程研究所,上海 201109; 3. 西安電子科技大學 信息感知技術協同創新中心,陜西 西安 710071)
0 引言
合成孔徑雷達地面動目標檢測(SAR-GMTI)技術,是一種對觀測場景高分辨成像,并對地面動目標檢測與定位的手段,已被廣泛應用于城市交通監視、軍事偵察預警等領域[1-2]。雷達對地觀測會面對不同地物類型的場景,它們的回波強度存在差異,尤其當雷達照射城市地區時,這些地區存在大量由人工建筑物反射的孤立強雜波,對場景雜波進行空時自適應處理[3]或兩通道相消處理[4-5]后,強雜波的剩余能量可能遠高于平均雜波剩余水平,使基于殘差圖強度的動目標檢測方法虛警率升高,檢測性能嚴重惡化。
隨著傳感器與雷達成像技術的發展,沿航跡干涉(ATI)雷達系統在地面動目標檢測領域得到了廣泛應用[6-10]。該系統在沿航跡方向均勻排布了2個接收通道以觀測同一場景,利用通道間沿航跡基線差造成的信號延遲,測量運動目標的多普勒信息。在ATI域,目標ATI相位與其多普勒偏移量成正比,由此實現動目標與靜止雜波的分離。GIERULL等[7]基于ATI技術提出了復多視干涉處理方法,在ATI域進行像素點干涉信息平均,此操作等效于低通濾波處理,能減少信號中的噪聲分量,有效提高ATI相位檢測方法的抗噪能力,但在實際雷達系統中,受非線性電子器件性能變化、平臺振動、天線T/R組件幅相響應差異等因素的影響,通道間通常存在著隨機且時變的幅度與相位誤差,在ATI域表現為隨機擾動分量,使ATI相位檢測方法的性能惡化。GIERULL等[8]基于加拿大RADARSAT-2衛星的雙通道ATI-SAR系統,提出一種聯合雜波抑制殘差圖幅度檢測和ATI相位檢測的兩步檢測法;劉保昌等[9]設計了一個基于徑向速度導向矢量的檢測量,以代替GIERULL兩步檢測法中的ATI相位檢測量,可應用于三通道ATI-SAR系統;高桂等[10]提出了一種聯合SAR圖像沿航跡干涉幅度與相位的動目標檢測方法。以上學者聯合信號幅度與ATI相位或其改進形式檢測動目標,一定程度上提高了動目標檢測的穩健性,但對于多通道雷達系統,ATI相位檢測及其改進形式利用的通道數據較少,并未充分利用多通道SAR系統的空域自由度。
為此,本文提出了一種基于非均勻雜波背景下濾波響應損失的兩步檢測方法。針對多通道SAR圖像數據,采用維納濾波處理來抑制場景雜波,基于殘差圖的強度初步檢測出潛在的動目標,構造潛在目標的濾波響應損失量,即濾波前后潛在目標能量的損失量,利用該檢測量進一步剔除虛警;通過仿真與實測數據驗證所提方法的有效性。
1 信號模型

(1)

在運動平臺雷達回波中,低信噪比的運動目標往往淹沒在雜波中,難以直接基于信號幅度信息進行有效檢測,因此,需對雜波進行抑制處理。在目標導向矢量未知的情況下,采用維納匹配濾波處理可獲得最優雜波抑制性能[15-16],其濾波權矢量woutp通過解式(2)優化問題得到
(2)
式中:woutp(1)=1表示濾波權矢量第1個元素為1;Rcn為雜波加噪聲協方差矩陣的最大似然估計值。
(3)
在非均勻雜波背景下,GIERULL等推導了幅度檢測量T1的統計特性,即
(4)
式中:ν為雜波的非均勻程度,由幅度檢測量的二階統計量m2估計,ν=(2m2-2)/(m2-2)。根據雷達檢測需求設定虛警概率Pfa1,對應的幅度檢測門限為
(5)
在復雜地物背景下,局部地物散射體的雷達后向散射強度可能發生劇烈變化,造成雜波強弱差異明顯,分布非均勻。如城市中的建筑物對電磁波散射強,而路面散射較弱,造成雜波分布極度非均勻。在雜波抑制處理過程中,為減小目標輸出損失,通常用樣本挑選后的均勻雜波樣本估計雜波加噪聲協方差矩陣,這會導致雜波抑制殘差圖上殘存著大量強雜波剩余。此時,若僅利用式(3)檢測動目標,則會出現大量虛警,嚴重影響動目標檢測性能。
2 檢測算法
針對復雜地物背景下的動目標檢測問題,提出一種基于濾波響應損失的兩步檢測方法:第一步采用式(3)初步檢測出潛在動目標,通常采用較低的幅度檢測門限,盡可能檢測出潛在目標;第二步構造潛在目標的濾波響應損失檢測量,進一步剔除虛警。
2.1 濾波響應損失檢測量
定義潛在目標的濾波響應損失檢測量,即
T2=Eout/Ein
(6)
式中:Ein,Eout分別為潛在目標在雜波抑制前、后的能量。
顯然,潛在目標在雜波抑制后的能量為
Eout=woutpHXXHwoutp
(7)
利用式(6)計算濾波響應損失檢測量,其關鍵在于估計潛在目標在雜波抑制前的能量。由二元檢測模型可知,在雜波抑制前,潛在目標所在的分辨單元中還包括雜波與噪聲。為分離出目標分量,采用雜波正交投影矩陣對消雜波分量,以獲取動目標的信號分量。基于子空間投影理論,雜波的正交投影矩陣為
(8)

(9)
式(8)中,當且僅當目標空域導向與雜波空域導向正交時,可準確估計出目標能量。然而,對于慢速運動目標,目標子空間與雜波子空間接近,此時利用式(10)會損失目標子空間與雜波子空間重疊部分對應的能量。田靜等[11]詳細分析了正交投影與斜投影的濾波響應特性。沿雜波子空間向目標子空間的斜投影矩陣為
(10)
將雜波信號sc⊙ac向斜投影矩陣作投影,其表達式為
(11)
Mobli_t(k)(sc⊙ac)=0
(12)
則目標信號ss⊙as(v)向斜投影矩陣投影為

(13)

(14)
將式(14)代入(13),得
(15)

將式(15)代入式(6),濾波響應損失檢測量為
(16)
根據動目標最小可檢測速度指標,目標響應損失量的檢測門限為
(17)
式中:vmin為動目標的最小可檢測速度。
本文檢測算法的處理流程如圖1所示,主要步驟為:對多通道回波數據進行SAR成像,并作通道均衡與圖像配準操作[12];對N幅SAR圖像數據利用式(2)進行維納匹配濾波處理;基于式(3)中的幅度檢測量初步檢測潛在動目標,依次估計潛在動目標的徑向速度[13],構造潛在目標斜投影矩陣,計算潛在目標的響應損失檢測量T2;根據式(17)計算濾波響應損失檢測門限η2,基于響應損失檢測實現二次檢測以剔除虛假目標;輸出目標檢測結果。
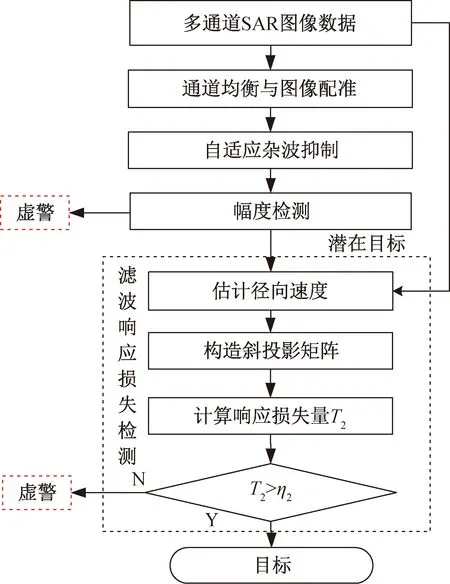
圖1 本文檢測算法的處理流程Fig.1 Processing flowchart of proposed method
3 實驗與分析
3.1 目標能量估計分析
仿真參數設置為:雷達波長λ=0.02 m,通道等效間距d=0.125 m,平臺沿航跡速度va=150 m/s,通道數N=5,單通道的信噪比RSN=10 dB,雜噪比RCN=10 dB。仿真中暫不考慮通道間幅度相位不一致性。圖2給出了目標能量估計結果隨徑向速度的變化情況,橫坐標表示目標的徑向速度,縱坐標表示估計的雜波抑制前動目標能量。為避免隨機誤差,圖中的曲線由1 000次蒙特卡洛實驗所得。單通道目標信噪比為10 dB,加上5個通道的相干積累增益10*lg10(5)≈6.989 7 dB,目標總能量為16.989 7 dB。由圖2可見:與正交投影相比,斜投影估計值更接近目標真實能量;隨著目標徑向速度的增大,動目標的空域導向矢量與雜波的空域導向矢量的夾角增大,目標能量估計值更加準確。
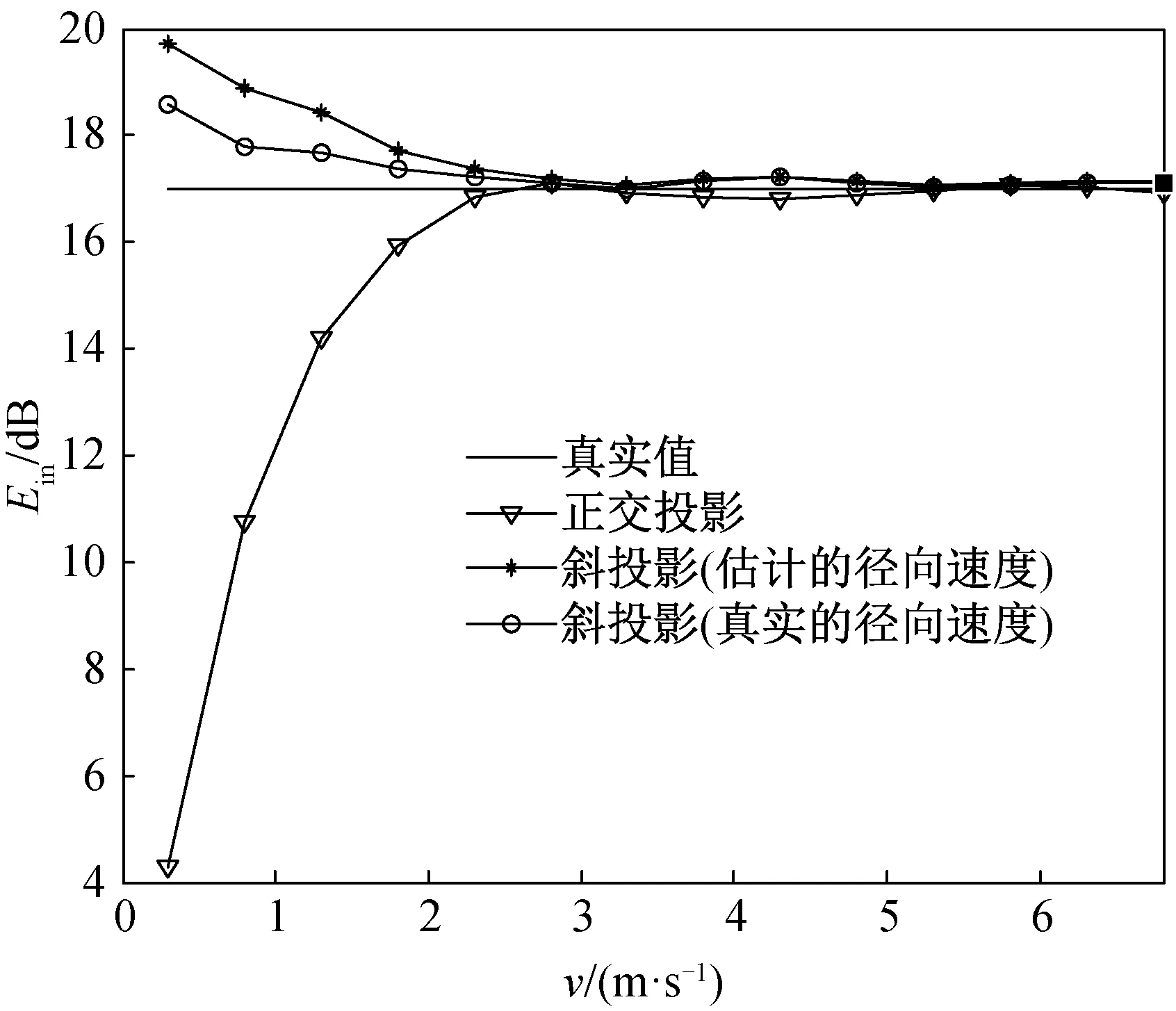
圖2 不同方法下目標雜波抑制前的能量估計Fig.2 Estimation results of target energy before clutter suppression versus different radial velocities by using different methods
在不同目標、不同信噪比下,動目標的濾波響應損失量如圖3所示。
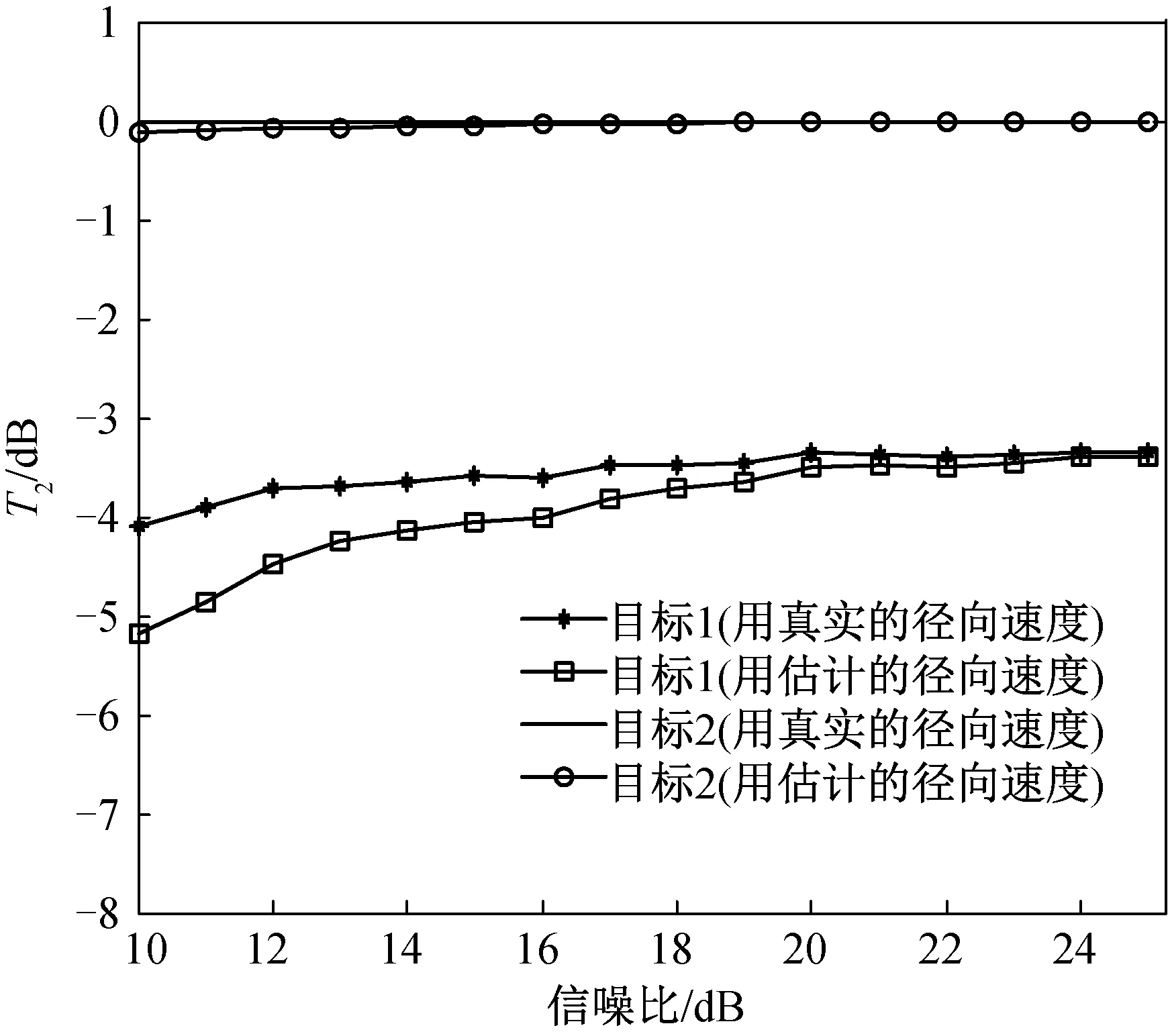
圖3 不同目標、信噪比下的動目標濾波響應損失量
圖3中,T2為雜波抑制后信號能量損失檢測量。為避免隨機誤差,圖中曲線由1 000次蒙特卡洛實驗所得。圖中目標1、2的徑向速度分別為2 m/s和6 m/s。對比目標1、2的濾波響應損失量可見:在相同信噪比下,徑向速度較大的目標對應的濾波響應損失較小,約為0;當目標徑向速度較小,為2 m/s時,濾波響應損失較大,約為-5~-4 dB。與采用目標真實徑向速度估計的濾波響應損失檢測量相比,采用估計的徑向速度所帶來的能量估計誤差不超過1.5 dB,可用于實現動目標檢測。
3.2 仿真實驗結果
將GIERULL等提出的兩步檢測法[8]和廣義最大似然比檢測(GLRT)方法[14]作為對比方法,驗證本文所提方法的檢測性能,仿真參數見表1。由表可知,通過在均勻雜波背景下增加強雜波樣本模擬非均勻雜波場景,強雜波對應的徑向速度為0。圖4給出了雜波抑制前后樣本能量示意。圖中:E為雜波抑制前的信號能量;Eout為雜波抑制后的信號能量。由圖4可見,雜波抑制后的強雜波剩余能量遠高于均勻雜波的剩余能量,對動目標檢測造成干擾。強雜波與動目標的濾波響應損失對比如圖5所示。由圖可見,強雜波的濾波響應損失約為40 dB,徑向速度大于0.5 m/s的動目標,其濾波響應損失不超過12 dB,這說明濾波響應損失檢測量能很好區分強雜波與運動目標。
通過蒙特卡洛實驗仿真了本文方法與GIERULL、GLRT方法的檢測性能,如圖6所示。
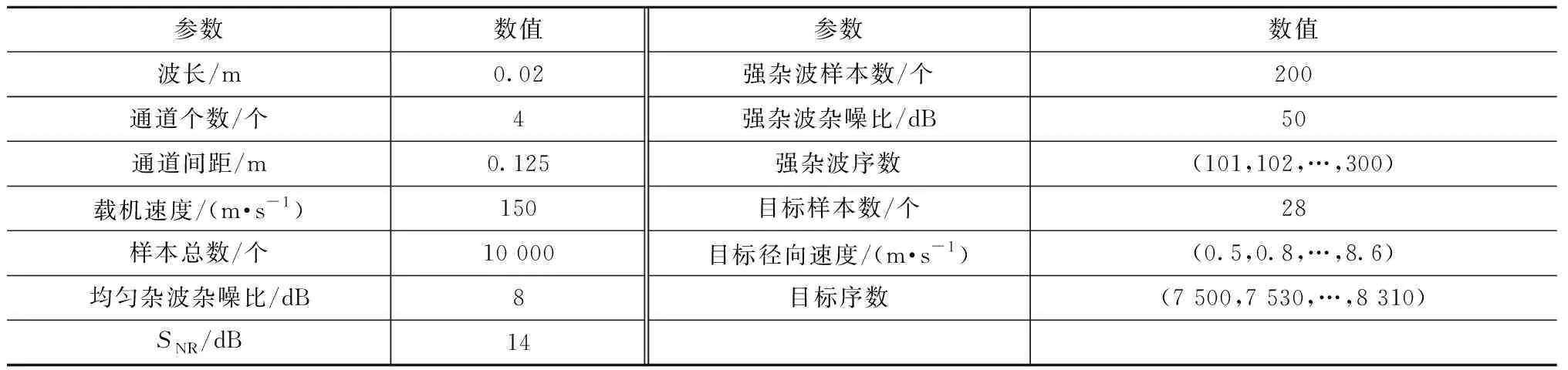
表1 系統參數
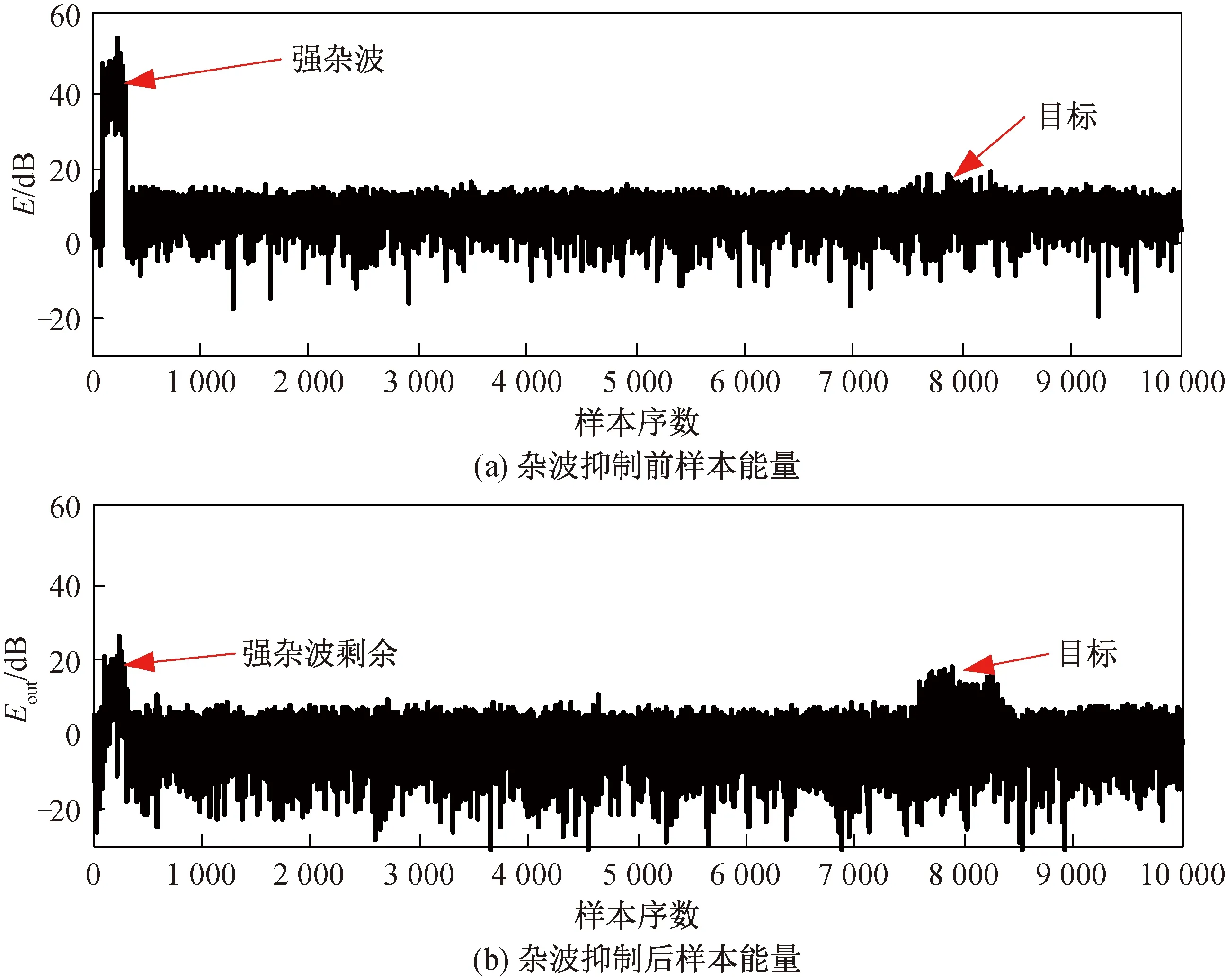
圖4 雜波抑制前后樣本能量對比結果Fig.4 Comparison of sample energy before and after clutter suppression
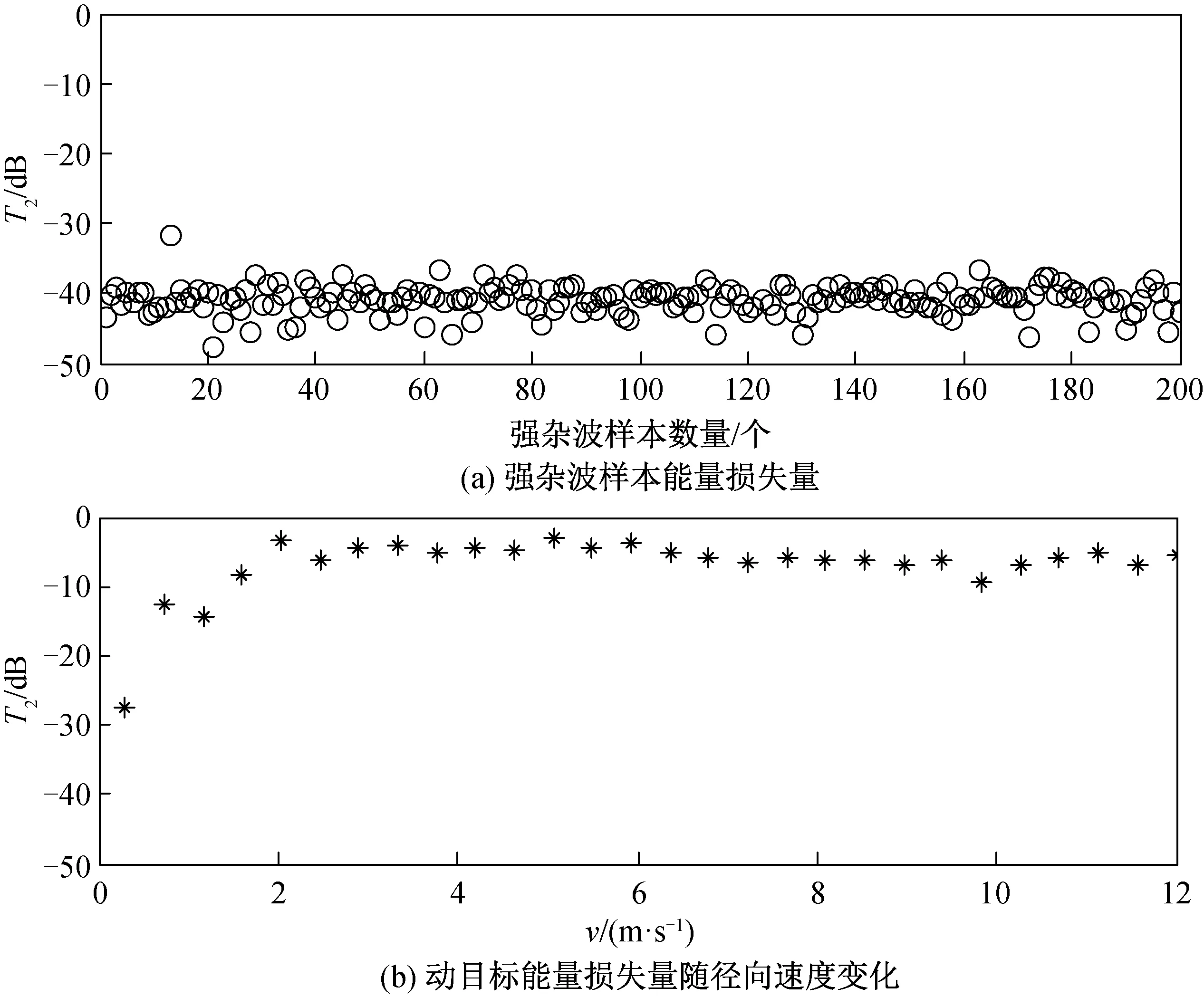
圖5 強雜波與動目標濾波響應損失量對比Fig.5 Comparison of filtering response loss between strong clutter and moving targets
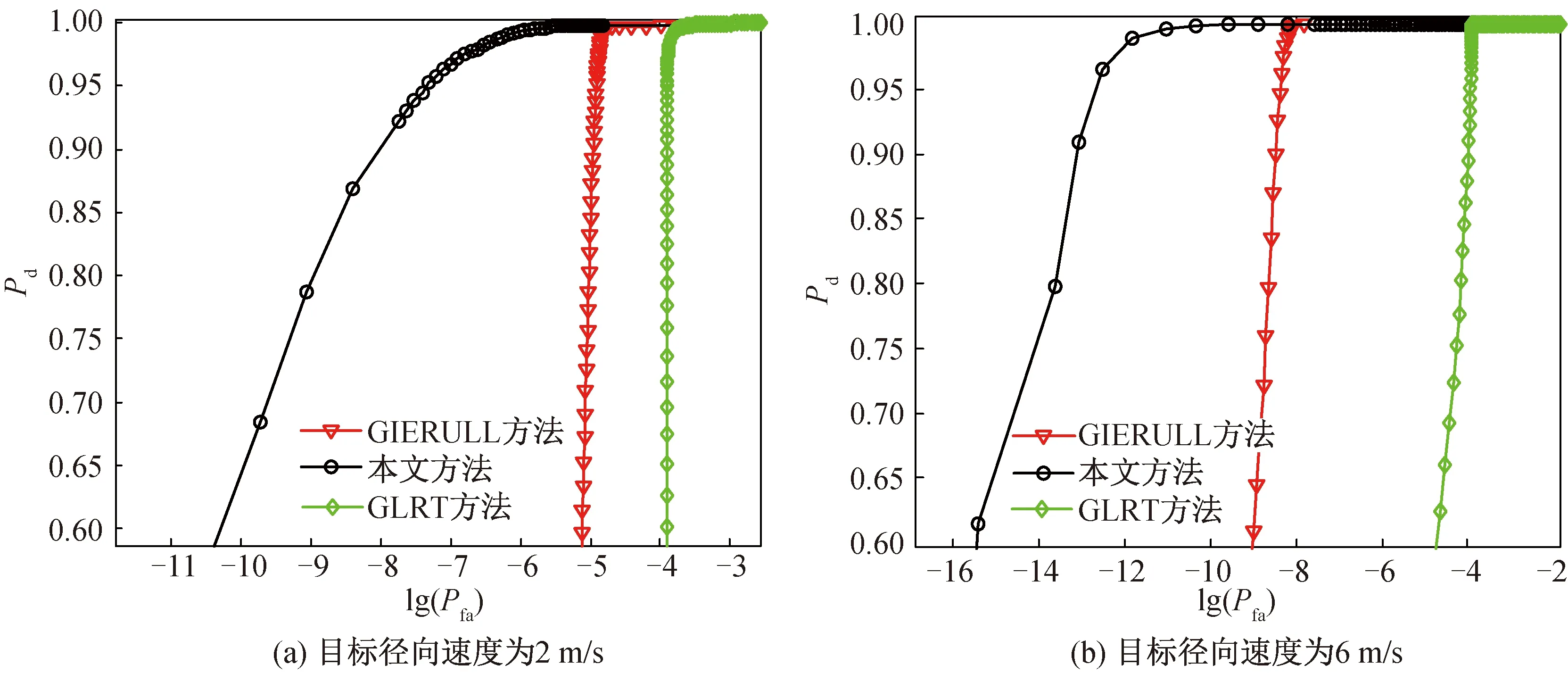
圖6 檢測性能曲線對比Fig.6 Comparison of detection performance for different methods
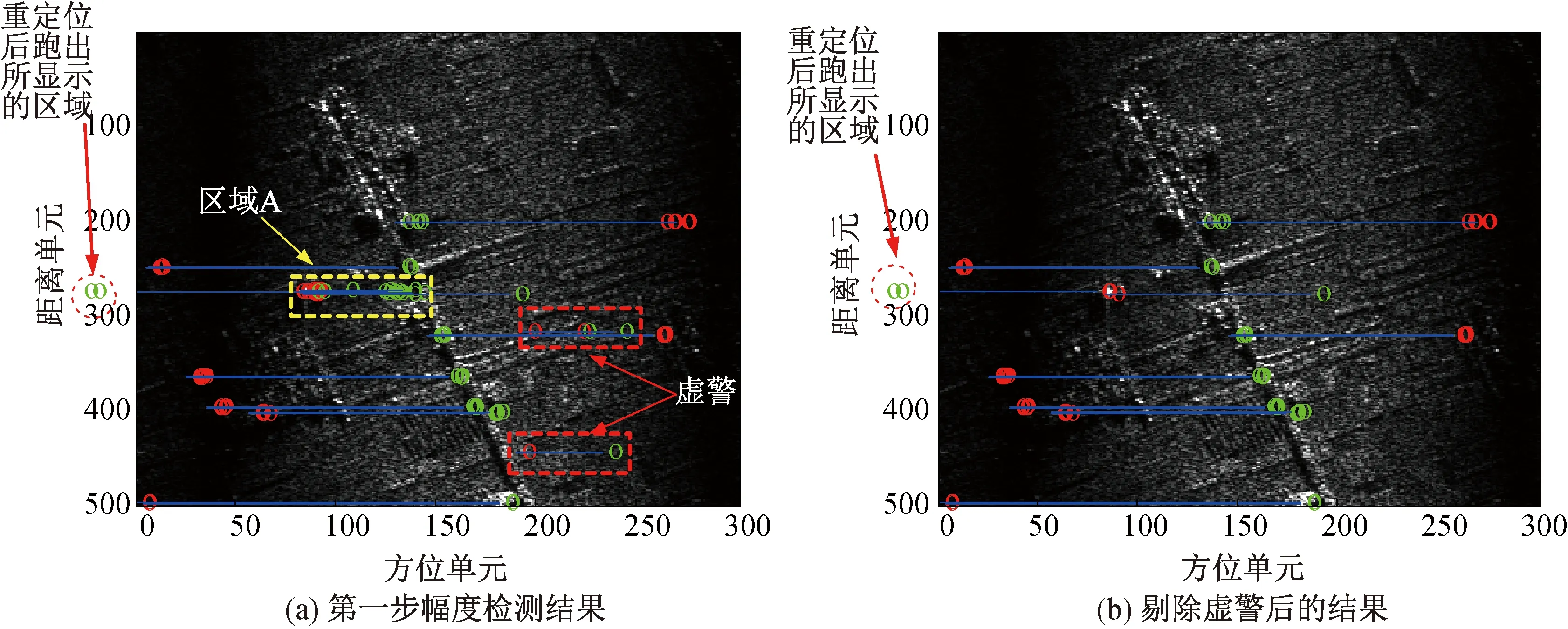
圖7 機載實測實驗結果Fig.7 Experimental results of airborne radar system
圖6中:Pd為動目標檢測概率,Pfa為虛警概率。由圖可見,本文方法檢測性能優于對比方法。
3.3 實測實驗結果
采用機載四通道雷達對實測數據進行實驗。機載雷達工作模式為正側視,平臺沿航跡的速度為100 m/s,波長為0.02 m,通道數為4個,通道等效相位中心的間距為0.3 m,脈沖重復頻率為800 Hz,積累脈沖數為500個。本文方法第一步幅度檢測的虛警率為10-4,檢測結果如圖7(a)所示。設給定目標最小可檢測速度為1 m/s,對應的濾波響應損失門限為-17 dB,剔除虛警后機載實測實驗結果如圖7(b)所示。圖7中:紅色圓圈表示檢測出的目標位置,綠色圓圈表示目標重定位后的位置,藍色線表示重定位的路徑。當檢測到的目標徑向速度很小或該目標無法定位到路面時,可認定為虛警。圖8分別給出了本文方法與幅度檢測方法檢測出的動目標濾波響應損失,右坐標軸為各動目標對應的徑向速度。圖7(a)中“區域A”的動目標徑向速度小于0.7 m/s,自適應濾波響應損失大于22 dB,很可能是虛警。采用本文方法可剔除這些虛警,得到圖7(b)的檢測結果。由圖7(b)和圖8可知,定位于路面動目標的徑向速度為1.8~3.0 m/s,自適應處理中響應損失小于17 dB,因此本文方法能有效檢測出路面行駛車輛,減少虛假檢測情況的發生。
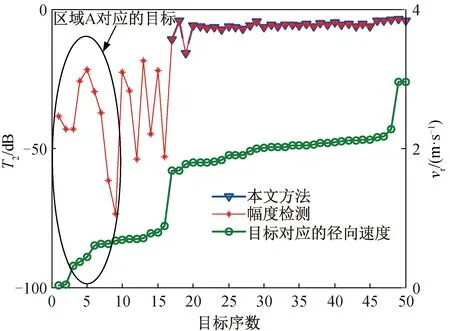
圖8 檢測結果濾波響應損失分析Fig.8 Analysis of filtering response loss of detected targets for different methods
4 結束語
本文提出一種基于濾波響應損失的兩步檢測方法,適用于非均勻雜波背景下的運動平臺雷達動目標檢測。該方法在雜波抑制殘差圖檢測的基礎上,利用自適應濾波前后目標的能量差構造濾波響應損失檢測量,以剔除虛警。在實際操作中,采用斜投影矩陣估計潛在目標濾波前的能量,進而獲得潛在目標的濾波響應損失量。實驗結果表明:與目標真實能量相比,利用斜投影矩陣估計的結果比采用正交投影估計的結果的誤差更小,能獲取更準確的目標能量估計結果;目標的濾波響應損失量與其信噪比、徑向速度有關;在給定信噪比下,目標徑向速度越大,目標濾波響應損失量越小,檢測性能越好。實測數據表明,本文方法在非均勻雜波背景下能有效檢測出路面機動車輛,剔除虛警。在后續工作中,將繼續研究濾波響應損失檢測量在H0假設下的統計特性。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
兒童故事畫報(2019年5期)2019-05-26 14:26:14
海峽科技與產業(2016年3期)2016-05-17 04:32:12
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12