運載火箭捷聯慣組全自主對準技術應用研究
2018-11-03 03:49:56裴忠海余薛浩周如好
上海航天 2018年5期
裴忠海,余薛浩,王 鵬,周如好,周 靜
(上海航天控制技術研究所,上海 201109)
0 引言
實現初始對準是慣導系統正常工作的基本條件。對慣導系統自對準技術進行研究,有助于提高對準精度,縮短對準時間,從而有效提升載體的導航精度和快速反應能力。國內外對慣導系統自對準技術已進行了多年研究,并取得了多方面的研究成果。運載火箭全自主對準功能是指在火箭起飛前實時計算火箭的當前姿態,敏感箭體晃動引起的姿態變化,為起飛前導航提供滿足精度要求的俯仰、偏航和滾動角初值。文獻[1]提出了一種適用于導彈晃動環境的水平對準算法。文獻[2]對系泊狀態下影響艦載導彈初始對準精度的因素進行了分析,并提出了補償方案。文獻[3]研究了車載慣導粗對準和精對準方法。我國現役運載火箭和新一代運載火箭均未實現全自主對準功能,普遍采用光學瞄準系統確定火箭發射前的初始姿態。該方案不僅需要投入大量設備,增加靶場地面瞄準設施的建設成本和火箭本身的研制成本,而且發射前瞄準流程繁瑣,對環境要求較高,不符合運載火箭低成本、快速發射的發展趨勢[4]。
目前,我國運載火箭光學捷聯慣組系統(激光/光纖)已基本取代平臺系統。隨著組合導航系統的成熟應用和高精度捷聯慣組的工程應用,精度高、適應性強的全自主對準算法有助于實現運載火箭發射前的初始對準。采用全自主對準技術,可不依賴地面的瞄準設備,簡化火箭瞄準測試流程,縮短發射測試時間,提高全箭發射的機動性。
1 運載火箭全自主對準特點
在運載火箭初始對準過程中,箭體易受發射場陣風等干擾因素的影響,這會導致慣導系統產生角晃動與線晃動,晃動角幅值最大可達十幾角分。運載火箭初始對準技術必須具有抗晃動干擾能力。捷聯慣組安裝于末子級儀器艙,距火箭底部有一定距離,箭體晃動會產生桿臂效應,且慣組存在一定的線晃動。初始對準的目標是在晃動干擾的環境下,利用慣導系統慣性傳感器測量輸出,運用特定的數據處理方法,降低或消除晃動干擾的不利影響,實時獲得慣導系統坐標系與當地水平基準面之間的夾角。運載火箭對對準精度、對準時間、姿態解算周期和姿態實時性有較嚴格的要求。對捷聯慣組全自主對準技術的研究工作需針對火箭實際發射特點,從以下三方面展開:結合環境條件和發射場的地理位置,對全自主對準性能要求和具體流程進行分析;考慮到初始對準中慣性器件精度對慣組系統對準精度影響很大,為提高自主對準精度,還需從工程應用角度提高捷聯慣組陀螺的精度;開展全自主對準算法驗證試驗是確保對準方案正確的重要環節,關鍵是要模擬實際發射時的狀態和環境條件,并能實時得到理論姿態信息,進行自對準精度考核。
2 運載火箭全自主對準算法
2.1 坐標系定義
坐標系具體定義如下:
1) 經線地球坐標系(e0系)。用oe0-xe0ye0ze0表示;以地球中心為原點oe0;oe0ye0軸和地球自轉軸重合;oe0ze0軸在赤道平面內指向對準開始時刻t0慣組所在經線;oe0xe0軸在赤道平面內;oe0xe0、oe0ye0、oe0ze0軸構成右手坐標系,該坐標系與地球固連,隨地球一同轉動。
2) 經線地心慣性坐標系(i0系)。用oi0-xi0yi0zi0表示,該坐標系是在粗對準的起始時刻經線地球坐標系在慣性空間形成的坐標系。
3) 箭體坐標系(b系)。用ob-xbybzb表示;坐標系原點ob位于火箭的瞬時質心;obxb軸與箭體縱軸重合,指向頭部為正;obyb軸在箭體縱向對稱面內,與obxb軸垂直,指向上為正;obzb由右手直角坐標系法則確定。
4) 箭體慣性坐標系(ib0系)。用oib0-xib0yib0zib0表示,該坐標系是在粗對準的起始時刻箭體坐標系在慣性空間形成的坐標系。
5) 北天東坐標系(t系)。用ot-xtytzt表示;以坐標原點為發射點;otxt軸指向北,otzt軸指向東,otyt軸垂直向上,由此構成右手坐標系。
6) 當地水平面坐標系(發射點重力坐標系g系)。用og-xgygzg表示;以坐標原點為發射點;ogxg軸在發射點水平面內,指向當前發射方向;ogyg軸垂直向上,與北向基準坐標系ogyt軸重合,發射時ogxg軸與北向基準坐標系ogxt軸相差的角度為當前發射方位角。
2.2 全自主對準算法
火箭在惡劣的晃動環境下,由晃動引起的干擾角速度遠大于地球自轉角速度。陀螺儀輸出信號中的信噪比十分低,且干擾角速度具有較寬的頻帶,因此很難在陀螺儀輸出中將地球自轉角速度信息提取出來。地球自轉角速度ωie是一個已知的恒定值,只要時間確定,重力加速度g在慣性空間內的方向改變就包含了地球的真北信息,基于慣性系的對準就是利用這一基本原理進行。該算法中,姿態矩陣被分解成5個矩陣求取,所用到的信息包括火箭箭體晃動姿態變化信息、重力加速度相對慣性空間隨地球旋轉引起的方向變化信息、地球自轉信息、地理信息和發射方位角信息。應用慣性凝固假設,建立箭體慣性坐標系,使箭體相對箭體慣性坐標系的姿態陣初值為單位陣,然后進行姿態更新解算。精對準采用卡爾曼濾波完成姿態修正。
2.2.1 凝固解析對準
基于重力加速度g在慣性坐標系內的運動軌跡包含地球自轉方向的原理,利用慣性空間中不同時刻的重力加速度作為參考矢量,實現凝固解析對準[5-6]。凝固解析對準基本計算過程為
(1)

(2)
(3)
(4)

解析自對準工作原理如圖1所示。
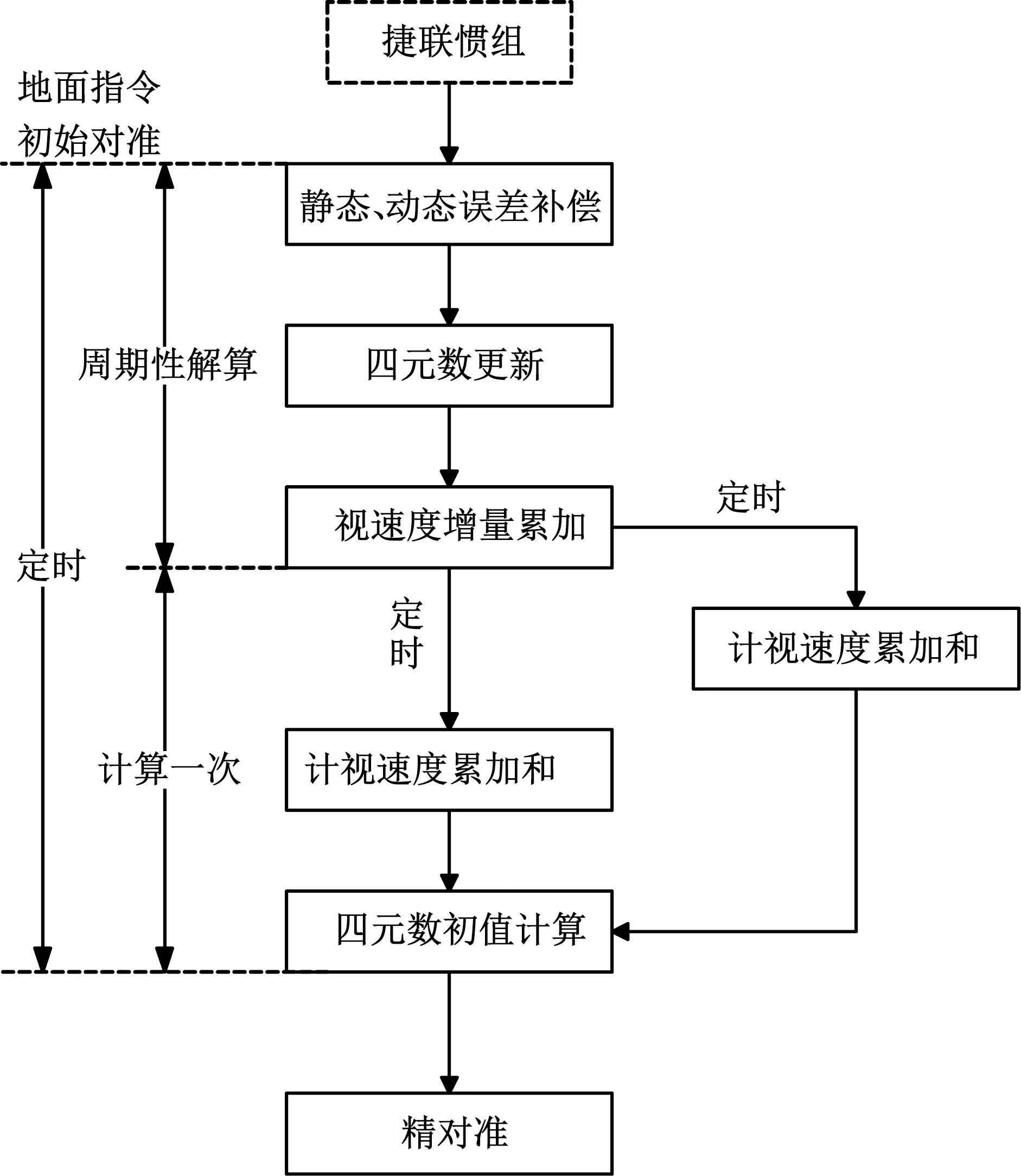
圖1 解析自對準示意圖Fig.1 Schematic diagram of analytical self-alignment
2.2.2 卡爾曼濾波對準
采用卡爾曼濾波器對導航系下的失準角進行估計和閉環補償,提高對準精度。以消除桿臂效應的水平速度誤差作為濾波觀測量,對姿態誤差進行估計和補償[7],即
(5)
(6)
慣組精對準工作原理如圖2所示。
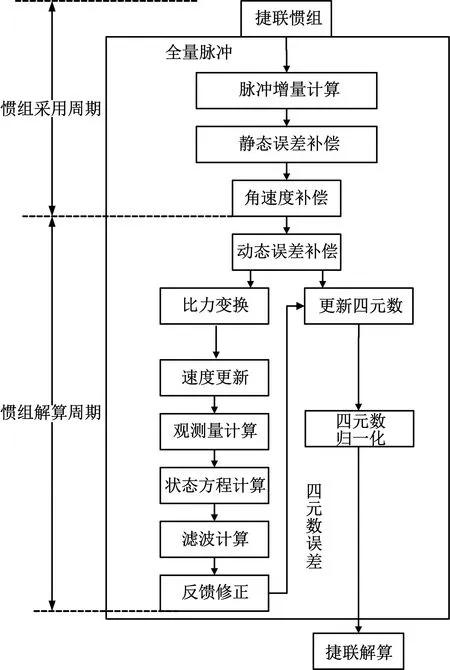
圖2 精對準示意圖Fig.2 Schematic diagram of precise alignment
2.2.3 桿臂補償方法
因箭體晃動引起的桿臂效應,對自對準精度有較大的影響,故需研究桿臂誤差補償方法。
由桿臂長度、角速度和角加速度可計算出桿臂效應加速度,在加速度計的輸出信號中補償干擾加速度。角速度和角加速度可由陀螺的輸出得到[8]。由桿臂效應產生的加速度測量誤差為
(7)

3 運載火箭全自主對準精度分析
因箭體系b系到箭體凝固系ib0系的姿態轉移陣是通過對陀螺的輸出信息進行四元數更新實時解算而來,故陀螺的輸出誤差是影響該矩陣的主要因素。
(8)
(9)

(10)

(11)
fib0-(φib0×)fib0+b
(12)
設計算地心慣性坐標系與實際地心慣性坐標系之間存在失準角φi0,則
(13)
整理略去高階小量,可得
(14)
4 全自主對準在運載火箭上的應用分析
全自主對準輸入為捷聯慣組測量數據。全自主對準在方案設計時考慮了相關環境和可靠性因素,對所用數據進行了如下處理:
1) 捷聯全量輸出。捷聯系統陀螺和加速度計的輸出信息,一定程度上可降低數據傳輸中錯拍和漏拍帶來的不利影響,也可減少由數據傳輸有效位數引起的精度損失。
2) 桿臂效應分析處理。桿臂效應會嚴重影響捷聯慣導系統的初始對準精度。算法中設計了桿臂效應補償方案。
3) 方位對準結果處理。基于慣性系的對準方法對靜基座和晃動環境都適用,能有效隔離外界晃動干擾,具有很好的抗干擾作用,對準時間適中,水平對準精度較高。考慮到箭體的實際晃動,通過對大量試驗數據的分析可知,方位角精對準結果可選擇精度穩定的時間段進行平均處理。因在箭體實際晃動中,方位角始終不變,故僅需通過精對準算法跟蹤水平角的變化。
5 試驗驗證與飛行結果分析
5.1 驗證試驗
采用高精度位置轉臺和光纖捷聯慣組測試系統進行試驗。試驗前,將光纖慣組安裝在三軸位置轉臺上,利用慣組上的棱鏡確定慣組方位與轉臺框架角之間的關系,建立基準方位。自對準試驗場景如圖3所示。

圖3 自對準試驗場景Fig.3 Scene of alignment experiment
對轉臺執行不同的姿態指令,模擬運載火箭發射時的晃動條件,所得對準結果如圖4~6和表1所示。
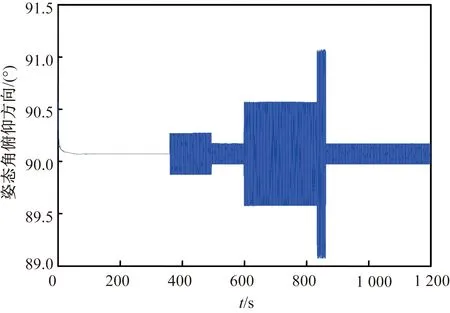
圖4 俯仰對準結果Fig.4 Pitching result of alignment
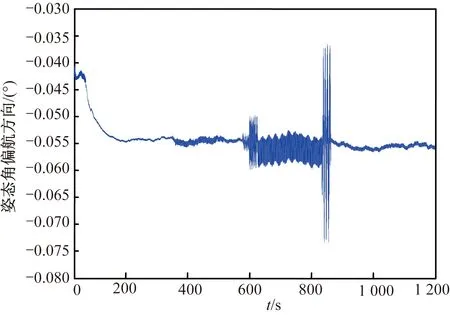
圖5 偏航對準結果Fig.5 Yawing result of alignment
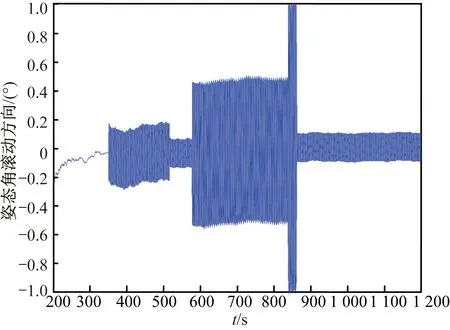
圖6 滾動對準結果Fig.6 Rolling result of alignment
由表1可見,多種條件下的試驗結果基本一致,凝固解析對準和卡爾曼濾波精對準均能很好地跟蹤慣組的晃動,對準精度均在3′以內。
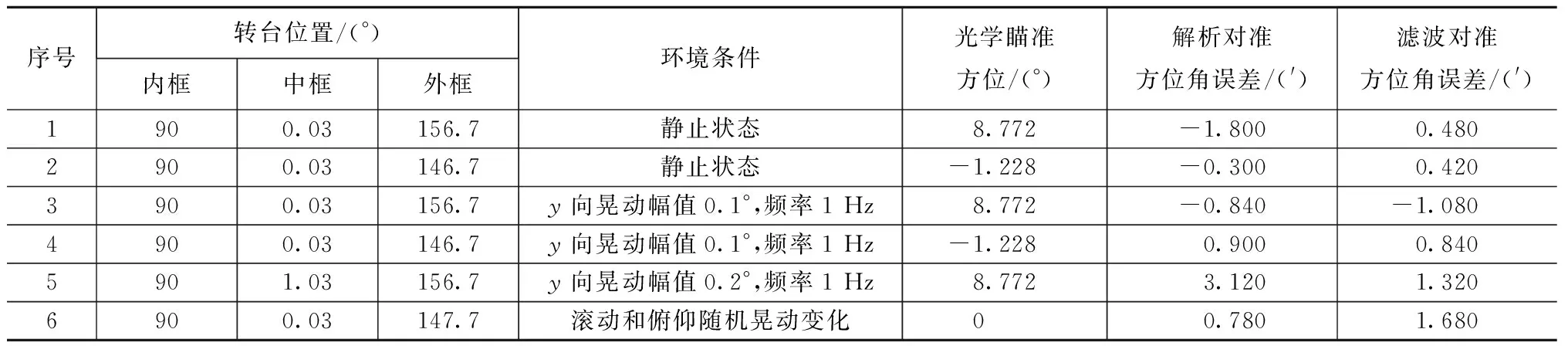
表1 高精度光纖慣組自對準動態驗證試驗結果
5.2 飛行試驗結果
2015年9月20日,新一代運載火箭在太原衛星發射中心首飛取得圓滿成功。該火箭控制系統采用雙捷聯慣組冗余方案。根據火箭發射起飛前數據進行全自主對準解算,所得光纖慣組全自主對準結果如圖7所示。
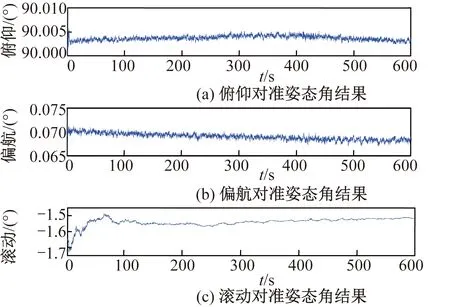
圖7 光纖慣組全自主對準結果Fig.7 Result of fiber-optic gyroscope inertial measurement unit alignment experiment
由全自主對準結果可見,光纖慣組能實現快速對準,且能跟蹤上箭體的微幅晃動。光纖慣組的水平角對準精度較高,與箭機解算結果一致。方位角對準精度約為10′。
6 結束語
本文對捷聯慣組全自主對準技術在運載火箭上的應用進行了分析,結合運載火箭的特點,設計了凝固解析粗對準算法與卡爾曼濾波精對準算法,并對桿臂效應進行了補償。試驗結果和飛行數據分析結果表明:利用本文提出的全自主對準算法可實現運載火箭發射前的捷聯慣組初始對準。為滿足運載火箭低成本和快速發射的需求,全自主對準技術將逐步應用于運載火箭,代替光學瞄準系統。