超視距機(jī)載武器雙向數(shù)據(jù)鏈通信方法研究
2018-11-03 03:49:52趙洪峰劉益吉曹奕濤
上海航天 2018年5期
趙洪峰,周 燾,劉益吉,曹奕濤
(1. 上海機(jī)電工程研究所,上海 201109; 2. 空軍裝備部 航空裝備科研局,北京 100843)
0 引言
具有超視距攻擊能力的機(jī)載武器在現(xiàn)代空戰(zhàn)中發(fā)揮著越來越重要的作用,其能在防區(qū)外攻擊敵方關(guān)鍵作戰(zhàn)節(jié)點(diǎn),保證載機(jī)處于敵方攻擊范圍外。目前,國外先進(jìn)的超視距空空導(dǎo)彈主要包括歐洲的“流星”(Meteor)導(dǎo)彈[1]、美國的AIM-120空對空導(dǎo)彈、俄羅斯的RVV-BD遠(yuǎn)程空對空導(dǎo)彈、法國的“米卡”(MICA)中距空對空導(dǎo)彈、以色列的“德比”(Derby)空空導(dǎo)彈和印度的“阿斯特拉”(Astra)中程空空導(dǎo)彈。“流星”的射程可達(dá)150 km,不可逃逸區(qū)為20~80 km,制導(dǎo)方式采用中制導(dǎo),通過載機(jī)或預(yù)警機(jī)進(jìn)行指令修正。AIM-120已發(fā)展出AIM-120A、AIM-120B、AIM-120C、AIM-120D這4個型號。其中,AIM-120D在AIM-120C-7的基礎(chǔ)上加裝了增強(qiáng)型雙向數(shù)據(jù)鏈,數(shù)據(jù)鏈上行鏈路用于更新制導(dǎo)指令,同時支持第三方信息,下行鏈路將導(dǎo)彈狀態(tài)信息回傳到載機(jī)上,導(dǎo)彈射程大于100 km。RVV-BD遠(yuǎn)程空對空導(dǎo)彈最大射程為200 km,在導(dǎo)彈飛行的初始段和中段采用慣性制導(dǎo)和數(shù)據(jù)鏈更新,末段使用主動雷達(dá)導(dǎo)引頭尋的制導(dǎo),導(dǎo)引頭可在70 km以外截獲雷達(dá)截面積為5 m2的目標(biāo)。“米卡”導(dǎo)彈裝有主動雷達(dá)導(dǎo)引頭和紅外成像導(dǎo)引頭這2種可互換的導(dǎo)引頭,其主動雷達(dá)導(dǎo)引頭探測距離為20 km,導(dǎo)彈最大射程為55 km。“德比”導(dǎo)彈動力射程可達(dá)65 km。“阿斯特拉”導(dǎo)彈射程范圍為25~40 km,由固體燃料推進(jìn)。
超視距機(jī)載武器的攻擊距離遠(yuǎn)遠(yuǎn)超過導(dǎo)彈主動雷達(dá)導(dǎo)引頭的探測范圍。為保證導(dǎo)彈能準(zhǔn)確完成中末制導(dǎo)交班,使導(dǎo)引頭正確截獲目標(biāo),中制導(dǎo)段需通過彈載數(shù)據(jù)鏈接收載機(jī)雷達(dá)探測后發(fā)送的目標(biāo)信息,同時通過反向鏈路回送導(dǎo)彈的位置速度信息和狀態(tài)信息[2-3],以便載機(jī)能對導(dǎo)彈進(jìn)行準(zhǔn)確制導(dǎo)。由此可見,在超視距機(jī)載武器的作戰(zhàn)過程中,如何確保雙向數(shù)據(jù)鏈的可靠通信變得尤為重要。
1 雙向數(shù)據(jù)鏈系統(tǒng)組成及通信機(jī)理
彈載數(shù)據(jù)鏈系統(tǒng)主要由數(shù)據(jù)鏈射頻組合、數(shù)據(jù)鏈中頻組合、數(shù)據(jù)鏈天線和相應(yīng)高低頻線纜組成[4]。中制導(dǎo)通信時,載機(jī)數(shù)據(jù)鏈傳輸設(shè)備將雷達(dá)探測的目標(biāo)數(shù)據(jù)加密、編碼、調(diào)制后,通過天線向空間輻射。彈載數(shù)據(jù)鏈?zhǔn)盏缴漕l信號后,進(jìn)行解調(diào)、解碼和解密,最終形成中制導(dǎo)信息。導(dǎo)彈通過數(shù)據(jù)鏈反向鏈路回傳自身位置和狀態(tài)信息是以上過程的逆過程。
現(xiàn)代空戰(zhàn)中,戰(zhàn)場電磁環(huán)境復(fù)雜。雙向數(shù)據(jù)鏈多采用直接序列擴(kuò)頻與跳頻相結(jié)合的通信體制,通過擴(kuò)頻增益和頻率捷變提高抗干擾能力,同時,為使一架載機(jī)可制導(dǎo)多發(fā)導(dǎo)彈,采用時分多址(TDMA)工作體制。目前傳統(tǒng)的機(jī)載武器抗干擾手段主要包括以下幾種:
1) 直接序列或編碼擴(kuò)頻。導(dǎo)彈與載機(jī)進(jìn)行雙向擴(kuò)頻通信,需雷達(dá)和彈載數(shù)據(jù)鏈設(shè)備使用相同的擴(kuò)頻碼。載機(jī)雷達(dá)用偽隨機(jī)序列(擴(kuò)頻碼)對待發(fā)送信息進(jìn)行頻譜擴(kuò)展,擴(kuò)頻后的信號帶寬取決于原始信息的速率和擴(kuò)頻碼與信息的比值,一般遠(yuǎn)大于原聲信號帶寬[5]。由于頻譜擴(kuò)展,信號的功率譜密度大大降低,截獲概率降低。導(dǎo)彈接收時用相同的擴(kuò)頻碼對已調(diào)擴(kuò)頻信號進(jìn)行解擴(kuò),將其還原成原始信號,再經(jīng)解調(diào)后輸出原始數(shù)據(jù)。彈上解擴(kuò)過程可抑制窄帶干擾,提高信噪比,但也會造成信號的失真。
2) 跳頻策略。導(dǎo)彈與載機(jī)進(jìn)行跳頻通信,需雙方的跳頻頻點(diǎn)和跳頻策略一致。載機(jī)在發(fā)送端利用跳頻圖案控制發(fā)送信號載波在某個很寬的頻段范圍內(nèi)進(jìn)行周期跳變來實(shí)現(xiàn)頻譜擴(kuò)展。跳頻通信抗干擾能力主要取決于跳頻速率和跳頻帶寬。若跳頻速率足夠快,則無法施加有效的跟蹤瞄準(zhǔn)干擾,只能施加寬帶壓制式干擾。此時,若跳頻帶寬足夠?qū)挘瑒t干擾功率譜密度會很低。導(dǎo)彈接收時使用與發(fā)送端相同的跳頻圖案,在時間上實(shí)現(xiàn)對信息的同步有效解調(diào)。足夠?qū)挼膸捄妥銐蚩斓恼{(diào)頻速率對接收機(jī)設(shè)計提出很大挑戰(zhàn)。
3) 跳時通信。發(fā)送方根據(jù)偽隨機(jī)序列控制信號的發(fā)送時刻和發(fā)送時長,使對方無法準(zhǔn)確獲取通信的時間信息,難以對通信信號進(jìn)行有效偵收進(jìn)而施加準(zhǔn)確干擾。跳時通信存在收發(fā)系統(tǒng)時間同步的問題,接收端或需花費(fèi)大量時間進(jìn)行偵聽搜索,易被欺騙式干擾所牽引。
4) 數(shù)據(jù)加密策略。數(shù)據(jù)鏈采用加密通信,導(dǎo)彈和雷達(dá)采用相同加密偽碼序列。加密偽碼序列可由載機(jī)雷達(dá)生成,并通過載機(jī)火控在導(dǎo)彈未離架時由總線裝訂給導(dǎo)彈。雷達(dá)發(fā)送信息時,用偽碼序列對數(shù)據(jù)進(jìn)行加密處理,導(dǎo)彈收到信息后對其進(jìn)行解密。
5) 分集技術(shù)。敵方電磁干擾一般只能干擾部分通信頻率,不會導(dǎo)致所有跳頻頻率阻塞。將同一組信息在多個頻率上重復(fù)發(fā)送,接收端自動舍棄錯誤頻點(diǎn)上的數(shù)據(jù),選擇使用正確的數(shù)據(jù)信息。
6) 抗干擾信號處理技術(shù)。針對進(jìn)入擴(kuò)頻接收機(jī)的部分頻帶干擾,抗干擾信號處理技術(shù)主要分為干擾估計抵消技術(shù)、變換域處理技術(shù)和碼輔助技術(shù)。干擾估計抵消技術(shù)利用擴(kuò)頻通信中偽隨機(jī)序列隨機(jī)性好、預(yù)測難度大,而干擾帶寬較窄、自相關(guān)性很強(qiáng)、預(yù)測難度較小的特點(diǎn),先按照某種最優(yōu)準(zhǔn)則對干擾進(jìn)行估計,再在接收信號中對干擾進(jìn)行抵消,從而達(dá)到抑制干擾的目的。變換域處理技術(shù)是基于部分頻帶干擾頻譜寬度遠(yuǎn)小于擴(kuò)頻帶寬的特點(diǎn),以及去除干擾所對應(yīng)的頻譜分量,不會造成擴(kuò)頻信號的嚴(yán)重失真的原理,在頻域?qū)Ω蓴_進(jìn)行零陷抑制。碼輔助技術(shù)一般用干擾的二階統(tǒng)計量和擴(kuò)頻碼信息對干擾進(jìn)行抑制。這幾種技術(shù)對落在帶內(nèi)且?guī)捿^寬的干擾均不起作用。
一般來說,機(jī)載武器數(shù)據(jù)鏈會綜合運(yùn)用上述抗干擾手段,以提高系統(tǒng)抗干擾能力。以外軍為例,其典型數(shù)據(jù)鏈包括SINCGARS數(shù)據(jù)鏈、EPLRS數(shù)據(jù)鏈、HAVE QUICK數(shù)據(jù)鏈、LINK-16數(shù)據(jù)鏈[6-8]、LINK-22數(shù)據(jù)鏈、WNW數(shù)據(jù)鏈和TTNT數(shù)據(jù)鏈。其中,SINCGARS數(shù)據(jù)鏈的抗干擾技術(shù)手段為跳頻,EPLRS數(shù)據(jù)鏈的抗干擾手段為猝發(fā)通信和跳頻,HAVE QUICK數(shù)據(jù)鏈的抗干擾手段為慢速跳頻和快速跳頻,LINK-16數(shù)據(jù)鏈的抗干擾手段為跳頻、直擴(kuò)、跳時、直擴(kuò)序列加密、跳頻圖案加密和時間加密[9-11],LINK-22數(shù)據(jù)鏈的抗干擾手段為慢速跳頻和快速跳頻,WNW數(shù)據(jù)鏈的抗干擾手段為采用OFDM波形和AJ波形,TTNT數(shù)據(jù)鏈的抗干擾手段為跳頻、跳時和頻譜感知。由此可見,跳頻仍是數(shù)據(jù)鏈通信抗干擾的主要技術(shù)手段。提高跳速、擴(kuò)展頻段、混合擴(kuò)頻、提高自適應(yīng)特性和加強(qiáng)戰(zhàn)場頻譜管理是跳頻通信目前的發(fā)展趨勢。
2 通信建立方法研究
機(jī)載導(dǎo)彈發(fā)射離架后,載機(jī)開始對導(dǎo)彈進(jìn)行制導(dǎo)。除上述提及的跳頻圖案、擴(kuò)頻碼及加密序列外,為能建立通信,載機(jī)雷達(dá)制導(dǎo)波束需對準(zhǔn)導(dǎo)彈。為此,需對載機(jī)雷達(dá)波束初始對準(zhǔn)導(dǎo)彈的方法進(jìn)行研究。
超視距機(jī)載導(dǎo)彈為提高射程,一般采用爬高式彈道。導(dǎo)彈離機(jī)后,初始由于重力作用,導(dǎo)彈高度下降。發(fā)動機(jī)點(diǎn)火后,導(dǎo)彈開始爬高,當(dāng)導(dǎo)彈高于載機(jī)時,導(dǎo)彈位于載機(jī)前方。導(dǎo)彈的經(jīng)度、緯度和高度分別為lm、λm和hm,載機(jī)的經(jīng)度、緯度和高度分別為lz、λz和hz。導(dǎo)彈當(dāng)?shù)孛先Π霃絉Nm=Re(1+esin2lm),載機(jī)當(dāng)?shù)孛先Π霃絉Nz=Re(1+esin2lz)。其中:e為軌道偏心率,e=1/298.257 ;Re為地球半徑,Re=637 813 7 m。
(1)
(2)
地球系到載機(jī)當(dāng)?shù)氐乩硐档霓D(zhuǎn)換矩陣為
(3)
(4)
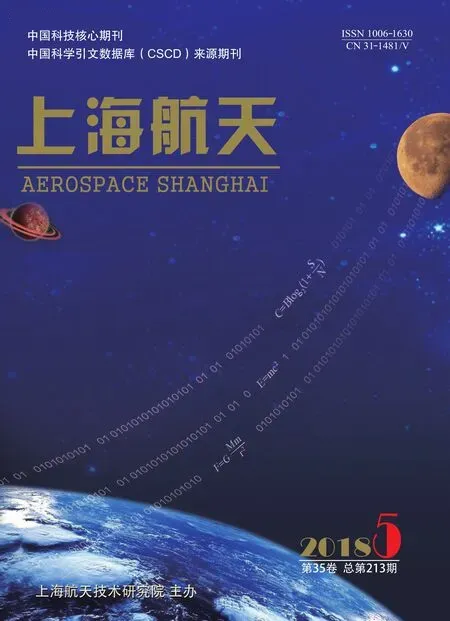
根據(jù)以上公式,設(shè)置超視距機(jī)載導(dǎo)彈典型發(fā)射條件,按照彈道條件,導(dǎo)彈發(fā)射后,導(dǎo)彈和載機(jī)的位置關(guān)系(取部分?jǐn)?shù)據(jù))如圖1所示。
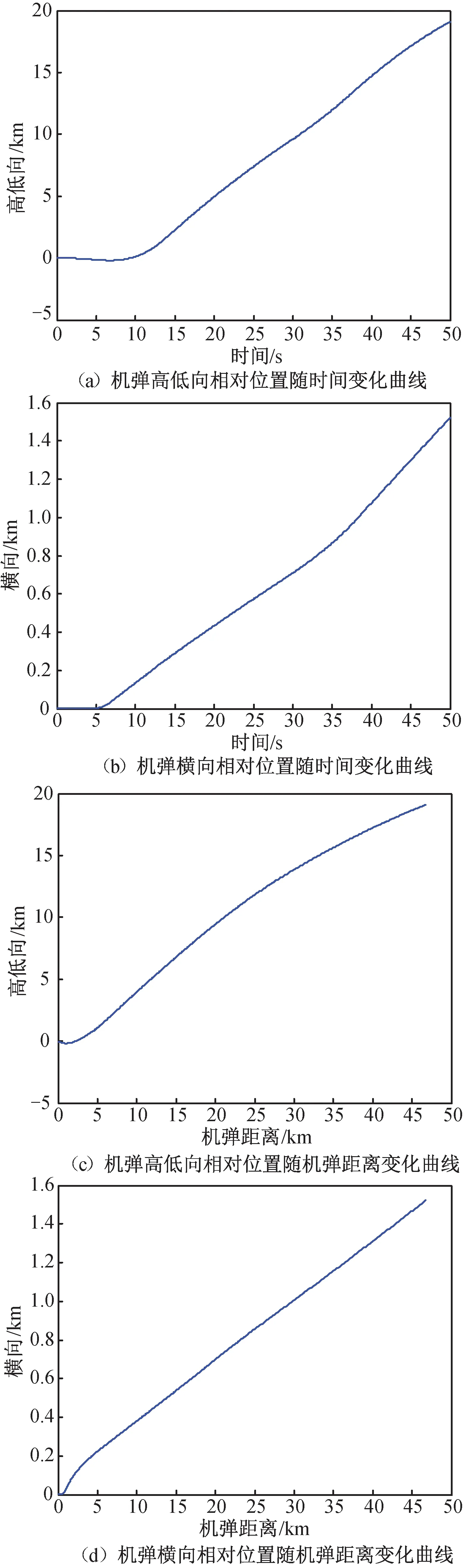
圖1 導(dǎo)彈發(fā)射后機(jī)彈相對位置關(guān)系
由圖可見,導(dǎo)彈在初始階段高于載機(jī)時,導(dǎo)彈與載機(jī)距離較近,飛行時間較短。因此,載機(jī)可將制導(dǎo)波束對準(zhǔn)正前方稍往上的方向,導(dǎo)彈爬高時必將經(jīng)過此片區(qū)域,可與載機(jī)建立通信。
為確保導(dǎo)彈經(jīng)過雷達(dá)波束初始指向位置并盡快建立通信,通過對導(dǎo)彈彈道數(shù)據(jù)和載機(jī)位置數(shù)據(jù)進(jìn)行相對位置解算,載機(jī)將初始制導(dǎo)波束高低方向指向略高于機(jī)體平面的位置,水平方向指向機(jī)頭和機(jī)目連線夾角平分線的位置。
通信建立后,載機(jī)根據(jù)導(dǎo)彈回傳的位置信息及自身位置信息,實(shí)時更新波束指向。波束指向角的計算公式為
(5)
式中:fpitch、fazimuth分別為制導(dǎo)波束的俯仰角和方位角;Pr為相應(yīng)的轉(zhuǎn)換矩陣,計算公式為
Pr=Mae*(Cz)′*[Pm-Pz]
(6)
Pm=[Pm1Pm2Pm3]
(7)
Pz=[Pz1Pz2Pz3]
(8)
Cz=[Cz1Cz2Cz3]
(9)
Pm1=(Re(1+esin2λm)+hm)cosλmcoslm
Pm2=(Re(1+esin2λm)+hm)cosλmsinlm
Pm3=(Re(1+esin2λm)(1-e2)+hm)sinλm
Pz1=(Re(1+esin2λz)+hz)cosλzcoslz
Pz2=(Re(1+esin2λz)+hz)cosλzsinlz
Pz3=(Re(1+esin2λz)(1-e2)+hz)sinλz
Cz1=[-sinλzcoslzcosλzcoslz-sinlz]
Cz2=[-sinλzsinlzcosλzsinlzcoslz]
Cz3=[cosλzsinλz0]
式中:lm、λm、hm分別為導(dǎo)彈的經(jīng)度、緯度和高度;lz、λz、hz分別為載機(jī)的經(jīng)度、緯度和高度;Cz為地球系至載機(jī)地理系的轉(zhuǎn)換矩陣;Mae為地理系至載機(jī)機(jī)體系的轉(zhuǎn)換矩陣,計算公式為
Mae=[Mae1Mae2Mae3]
(10)
Mae1=[cosθpitchcosθyawsinθpitch-cosθpitchsinθyaw]
Mae2=[Mae21Mae22Mae23]
Mae3=[Mae31Mae32Mae33]
Mae21=-sinθpitchcosθyawcosθroll+sinθyawsinθroll
Mae22=cosθpitchcosθroll
Mae23=sinθpitchsinθyawcosθroll+cosθyawsinθroll
Mae31=sinθpitchcosθyawsinθroll+sinθyawcosθroll
Mae32=-cosθpitchsinθroll
Mae33=-sinθpitchsinθyawsinθroll+cosθyawcosθroll
式中:θpitch、θyaw、θroll分別為載機(jī)的俯仰角、偏航角和滾轉(zhuǎn)角。
根據(jù)上述公式,以載機(jī)為中心,典型彈道制導(dǎo)波束指向角仿真結(jié)果如圖2所示。
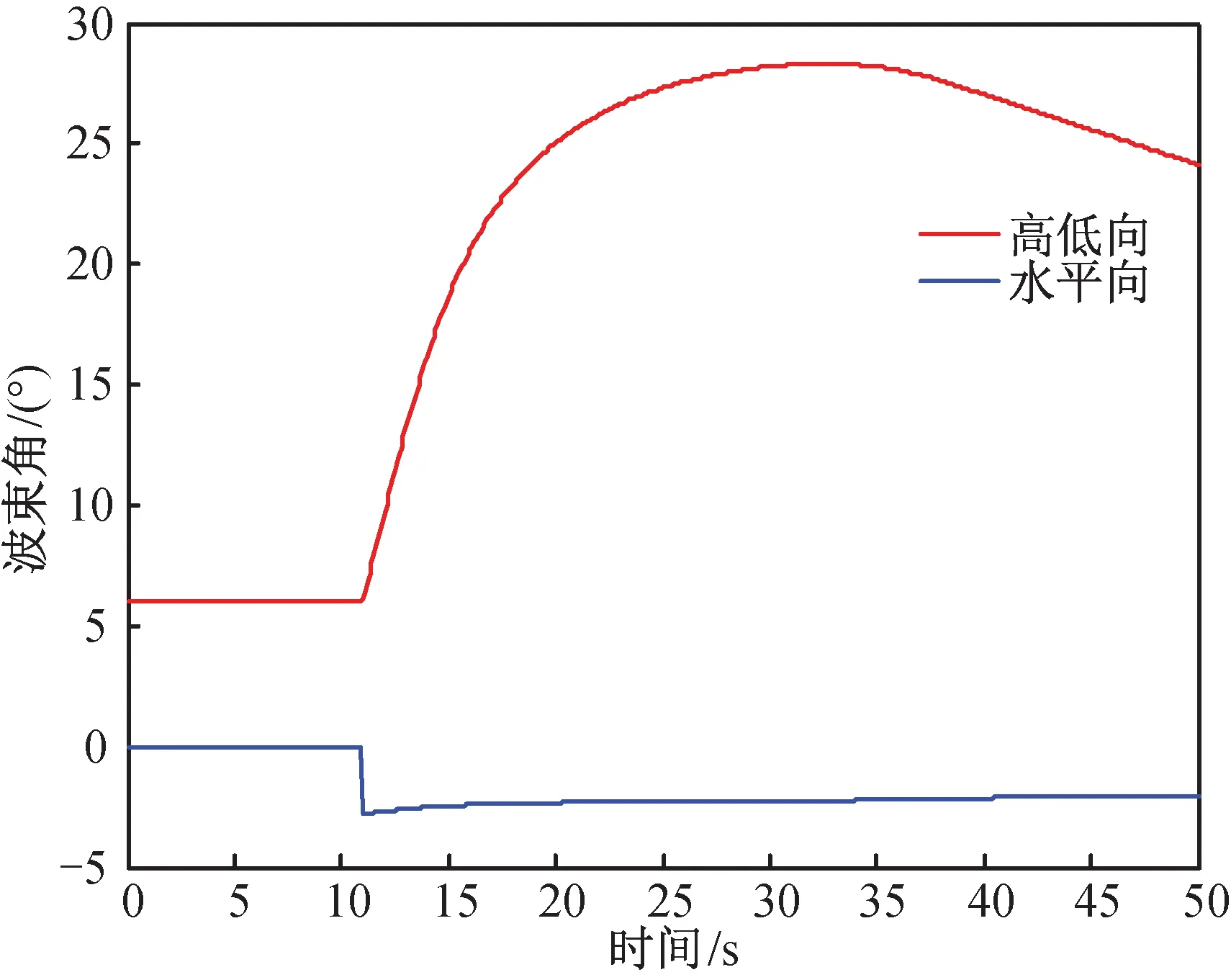
圖2 導(dǎo)彈發(fā)射后載機(jī)制導(dǎo)波束指向角Fig.2 Beam direction of carrier aircraft after missile is fired
上述波束指向數(shù)據(jù)是建立在導(dǎo)彈與載機(jī)建立通信時機(jī)彈位置不存在誤差的基礎(chǔ)上計算所得。導(dǎo)彈飛行過程中,數(shù)據(jù)鏈接收靈敏度計算公式為
Pr=Pt-Ct+Gt-F+Gr-Cr
(11)
式中:Pr為導(dǎo)彈數(shù)據(jù)鏈接收靈敏度;Pt為載機(jī)雷達(dá)發(fā)送端功率;Ct為發(fā)送端接頭和電纜損耗;Cr為接收端接頭和電纜損耗;Gt為發(fā)送端天線增益;Gr為接收端天線增益;F為自由空間損耗,其計算公式為
F=20lgR+20lgf+32.44
(12)
式中:R為導(dǎo)彈與載機(jī)間距離,單位為km;f為通信頻率,單位為MHz。
由上述公式可知,為保持遠(yuǎn)距通信,導(dǎo)彈數(shù)據(jù)鏈設(shè)備需具備很高的接收靈敏度。由于載機(jī)雷達(dá)功率較大,因而實(shí)際飛行中,導(dǎo)彈可能在初始距載機(jī)較近時就與載機(jī)雷達(dá)建立通信,此時導(dǎo)彈尚處于載機(jī)下方且兩者水平距離較近。此種條件下,因載機(jī)自身高度數(shù)據(jù)和導(dǎo)彈回傳高度數(shù)據(jù)之間可能存在偏差,初始建立通信時,導(dǎo)彈與載機(jī)橫間距離較近,故波束指向角可能會存在較大偏差。根據(jù)高度誤差典型值,計算得到的波束指向角如圖3所示。
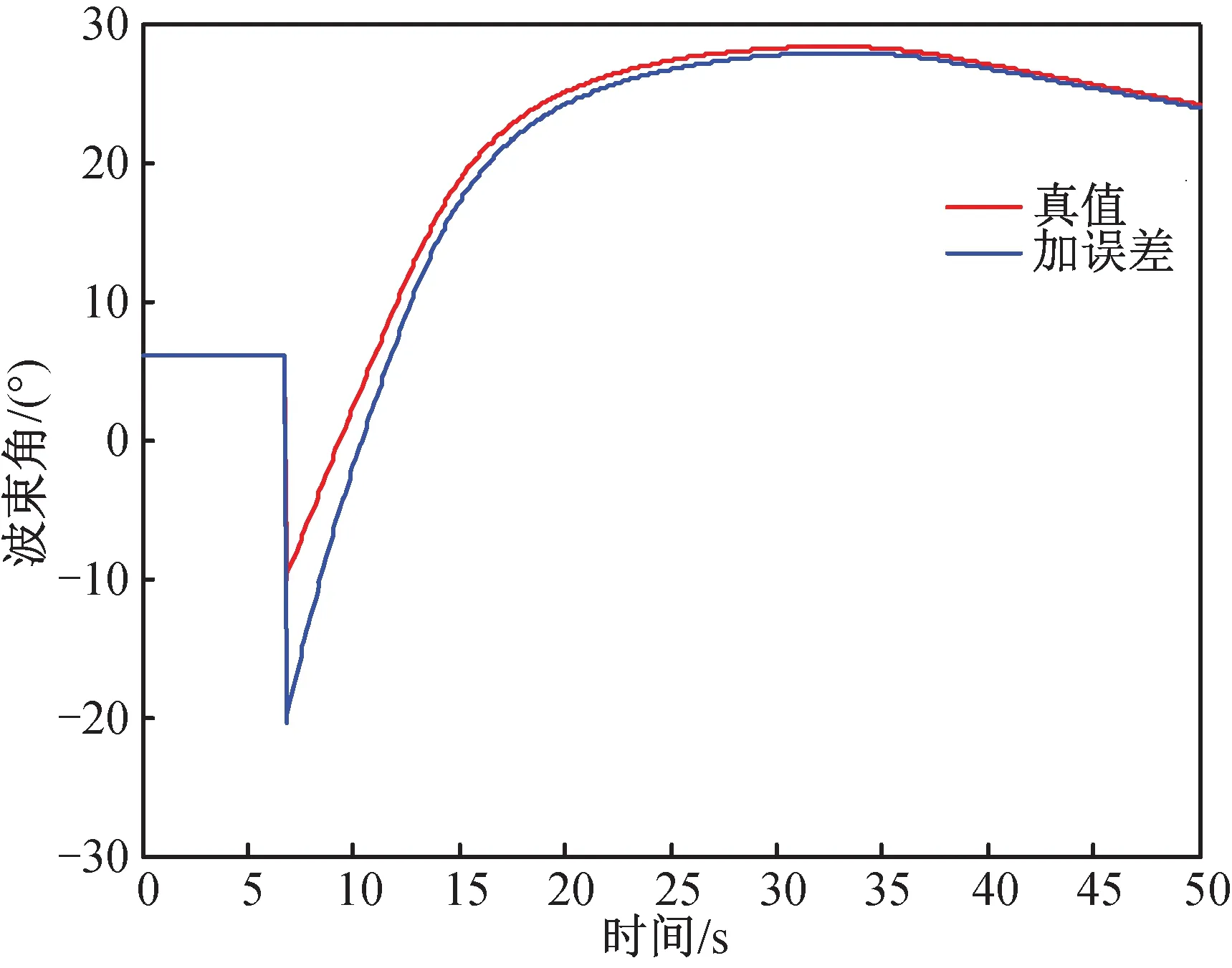
圖3 存在誤差條件下載機(jī)雷達(dá)制導(dǎo)波束指向角Fig.3 Beam direction of carrier aircraft when there exists height error
由圖可見,初始通信建立時,載機(jī)雷達(dá)波束存在偏差,最大波束指向偏差超過10°。在如此大的波束指向偏差下,載機(jī)雷達(dá)制導(dǎo)波束無法覆蓋導(dǎo)彈位置,雙方通信可能中斷。
載機(jī)雷達(dá)在機(jī)彈距離較近時采用的制導(dǎo)波束一般較寬,因此導(dǎo)彈在此波束覆蓋范圍內(nèi)的時間會較長。為解決該問題,在初始建立通信時,載機(jī)收到導(dǎo)彈回傳的位置信息后,可不立即按照導(dǎo)彈位置更新波束指向,而是在一段時間內(nèi)保持初始波束指向。此段時間內(nèi),導(dǎo)彈位置始終處于載機(jī)波束覆蓋范圍內(nèi),且隨著時間的推移,導(dǎo)彈與載機(jī)橫向距離拉大,由高度誤差造成的波束指向偏差帶來的影響會減小。取載機(jī)典型波束寬度,得到載機(jī)導(dǎo)彈相對位置關(guān)系如圖4所示。
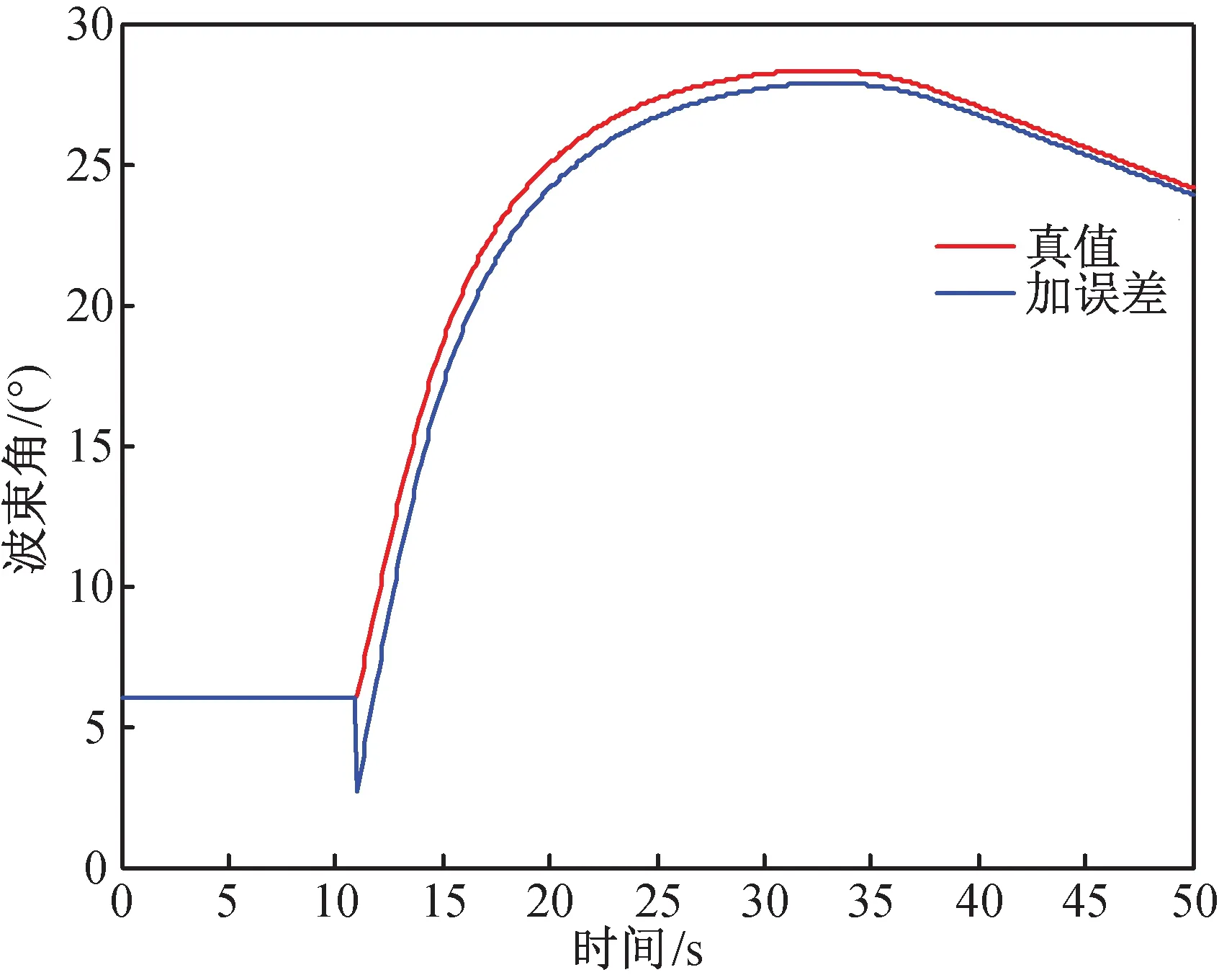
圖4 初始制導(dǎo)波束保持不變后存在誤差條件下載機(jī)雷達(dá)制導(dǎo)波束指向Fig.4 Beam direction of the carrier aircraft with initial beam direction remaining unchanged
由圖可知,采用上述方法后,即使導(dǎo)彈高度和載機(jī)高度存在一定的偏差,載機(jī)雷達(dá)制導(dǎo)波束與實(shí)際制導(dǎo)波束指向存在的偏差也很小,最大不超過4°,在制導(dǎo)波束覆蓋范圍內(nèi),導(dǎo)彈與載機(jī)能保持可靠通信。
3 載機(jī)火控伴隨彈道解算精度的要求
導(dǎo)彈與載機(jī)建立數(shù)據(jù)鏈通信后,可能會受外部環(huán)境影響而中斷通信。此時,若載機(jī)根據(jù)通信中斷前導(dǎo)彈的位置和速度信息進(jìn)行導(dǎo)彈位置外推,則因無彈道解算模型只能進(jìn)行直線外推,故結(jié)果會存在一定偏差,且偏差程度會隨通信中斷時間的加長而增大。為解決此問題,載機(jī)應(yīng)具備導(dǎo)彈彈道解算功能,根據(jù)導(dǎo)彈提供的模型生成伴隨彈道。雙向數(shù)據(jù)鏈通信中斷時,載機(jī)火控按照伴隨彈道中導(dǎo)彈的位置進(jìn)行波束指向預(yù)定,以重新建立通信。載機(jī)在進(jìn)行伴隨彈道解算時,由于解算時間的約束,采取的導(dǎo)彈模型為3自由度模型,該模型與實(shí)際的6自由度模型存在偏差,導(dǎo)致彈道數(shù)據(jù)存在偏差。根據(jù)導(dǎo)彈發(fā)射后機(jī)彈相對位置關(guān)系及載機(jī)制導(dǎo)波束覆蓋范圍,可得出載機(jī)火控解算的導(dǎo)彈經(jīng)度、緯度及高度允許誤差范圍。

機(jī)彈相對距離為
(13)
載機(jī)理論波束指向角為fpitch、fazimuth,載機(jī)雷達(dá)波束寬度為θy、θw。根據(jù)機(jī)彈相對位置及波束指向數(shù)據(jù),得到地理系下位置矢量上下邊界,計算公式為
(14)
(15)
(16)
式中:Pyup、Pylow分別為機(jī)彈距離在高低方向投影上下界;Pzright、Pzleft分別為機(jī)彈距離在水平方向投影上下界;Pmup、Pmlow分別為地理系下的機(jī)彈位置矢量上下界,將此位置矢量轉(zhuǎn)換到地心系下,再根據(jù)地心系下載機(jī)位置得到地心系下導(dǎo)彈位置矢量上下邊界值。
根據(jù)以上計算公式得到導(dǎo)彈位置允許誤差仿真圖(隨著機(jī)彈距離的加大,允許的誤差范圍也會隨之加大,本文取導(dǎo)彈發(fā)射后的部分?jǐn)?shù)據(jù))。圖5~7分別給出了經(jīng)度允許誤差范圍隨時間變化情況,水平面允許誤差范圍和高度允許誤差范圍隨導(dǎo)彈飛行時間變化情況。
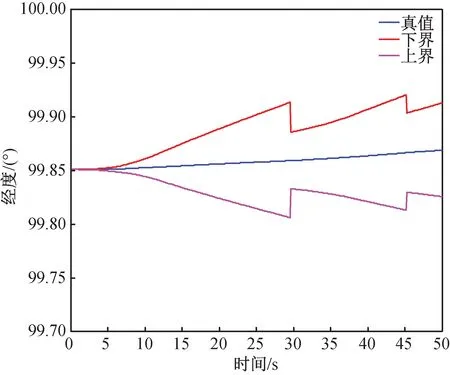
圖5 經(jīng)度允許誤差范圍隨時間的變化Fig.5 Change of allowable error of longitude along with time
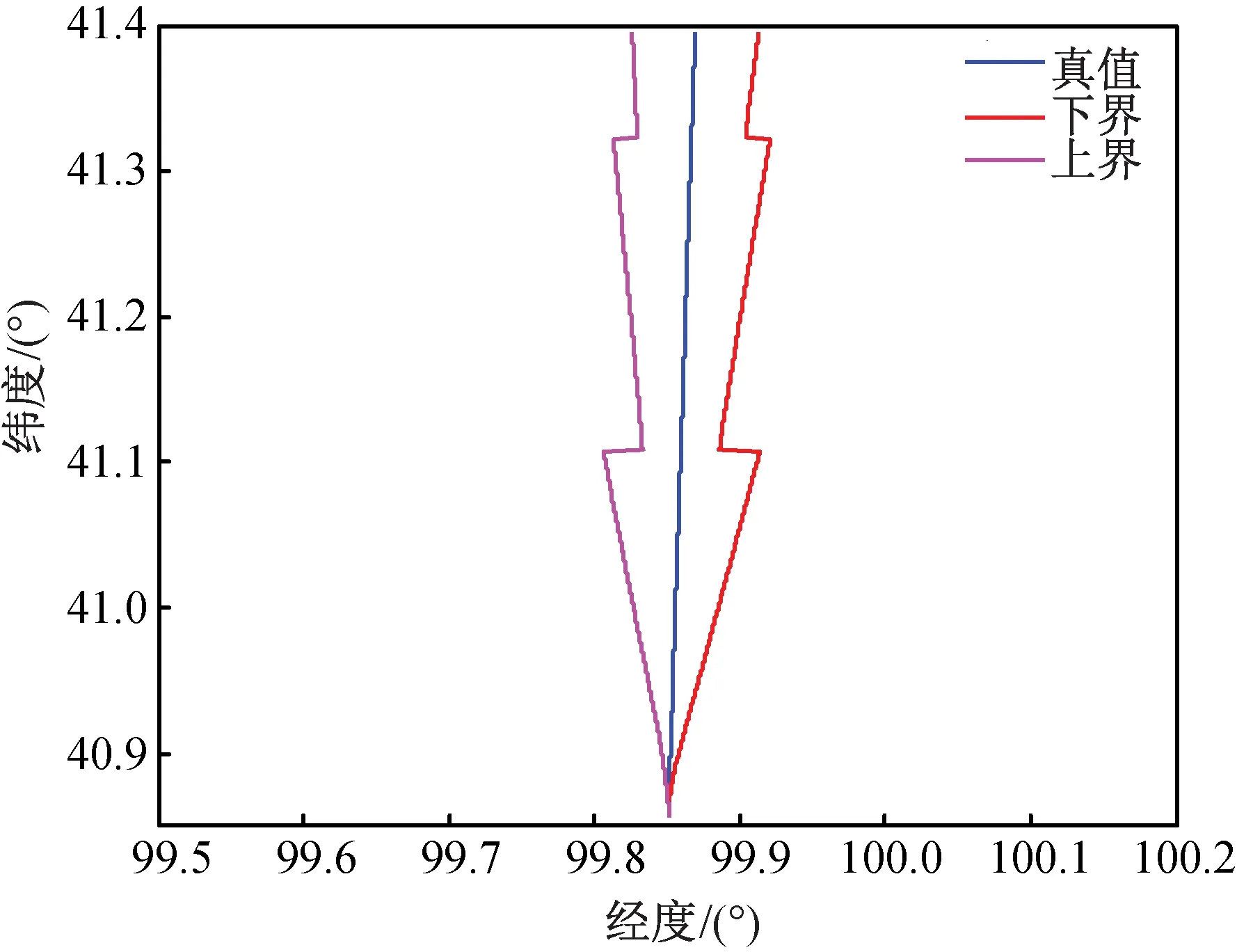
圖6 水平面允許誤差變化Fig.6 Allowable error of longitude in horizontal plane
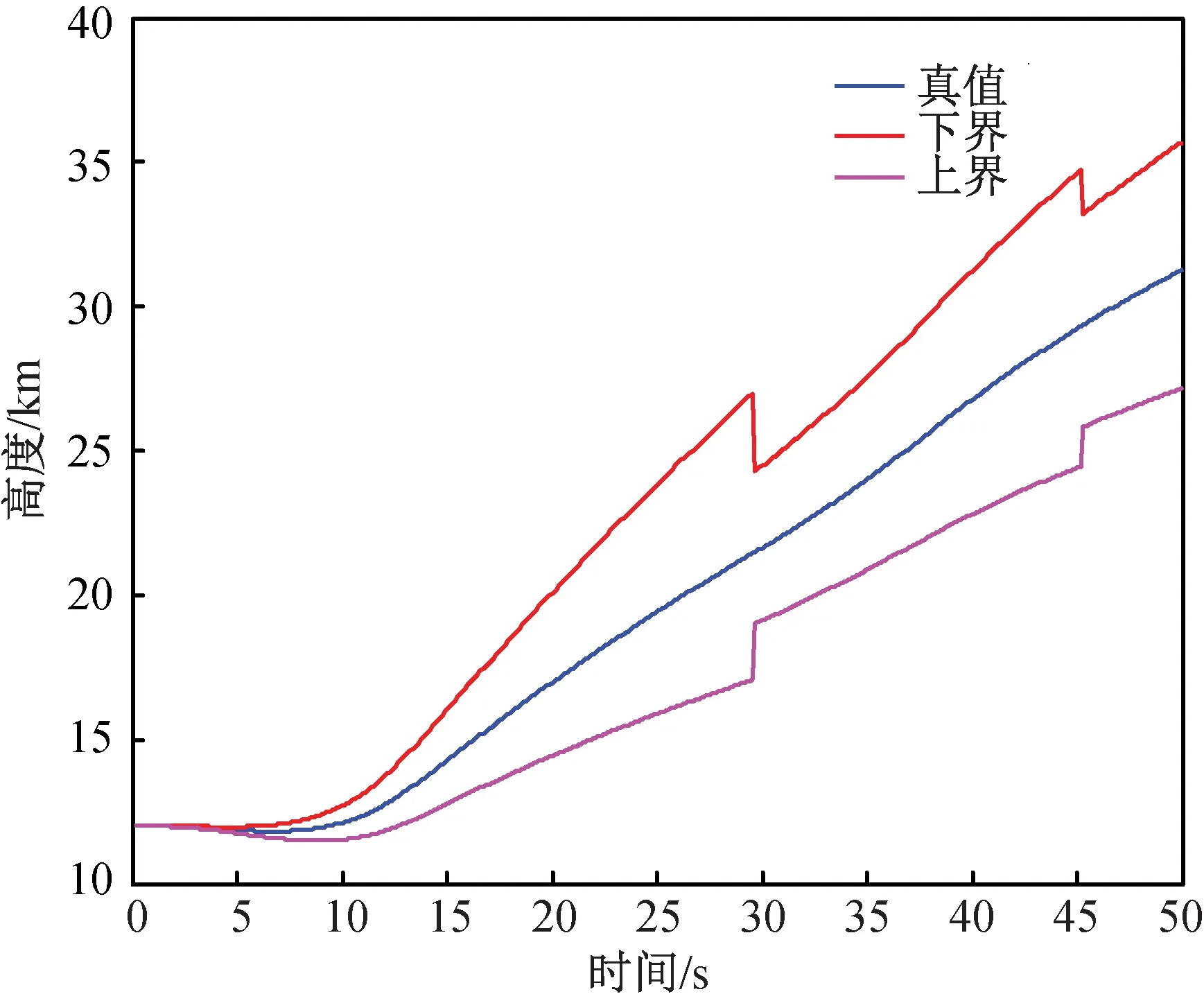
圖7 高度允許誤差范圍隨時間的變化Fig.7 Change of allowable height error along with time
由圖5~7可見,載機(jī)火控解算的伴隨彈道最大允許誤差不應(yīng)超過圖中所示數(shù)據(jù)。機(jī)彈對接聯(lián)試時,可參照此數(shù)據(jù)判斷載機(jī)火控解算精度是否滿足要求。
4 數(shù)據(jù)鏈通信的試驗(yàn)驗(yàn)證方法
為對導(dǎo)彈發(fā)射后的數(shù)據(jù)鏈通信進(jìn)行驗(yàn)證,需建立真實(shí)的機(jī)彈對接環(huán)境。通過仿真模擬器模擬真實(shí)載機(jī)飛行,并通過雷達(dá)模擬器設(shè)置虛擬目標(biāo)向?qū)椦b訂數(shù)據(jù)。仿真環(huán)境能模擬導(dǎo)彈真實(shí)發(fā)射時的彈動,讓導(dǎo)彈和載機(jī)進(jìn)入發(fā)射后流程,從而進(jìn)行雙向數(shù)據(jù)鏈通信。
為此構(gòu)建的試驗(yàn)環(huán)境如圖8所示,主要包括載機(jī)模擬環(huán)境、導(dǎo)彈發(fā)射裝置、導(dǎo)彈和電源。
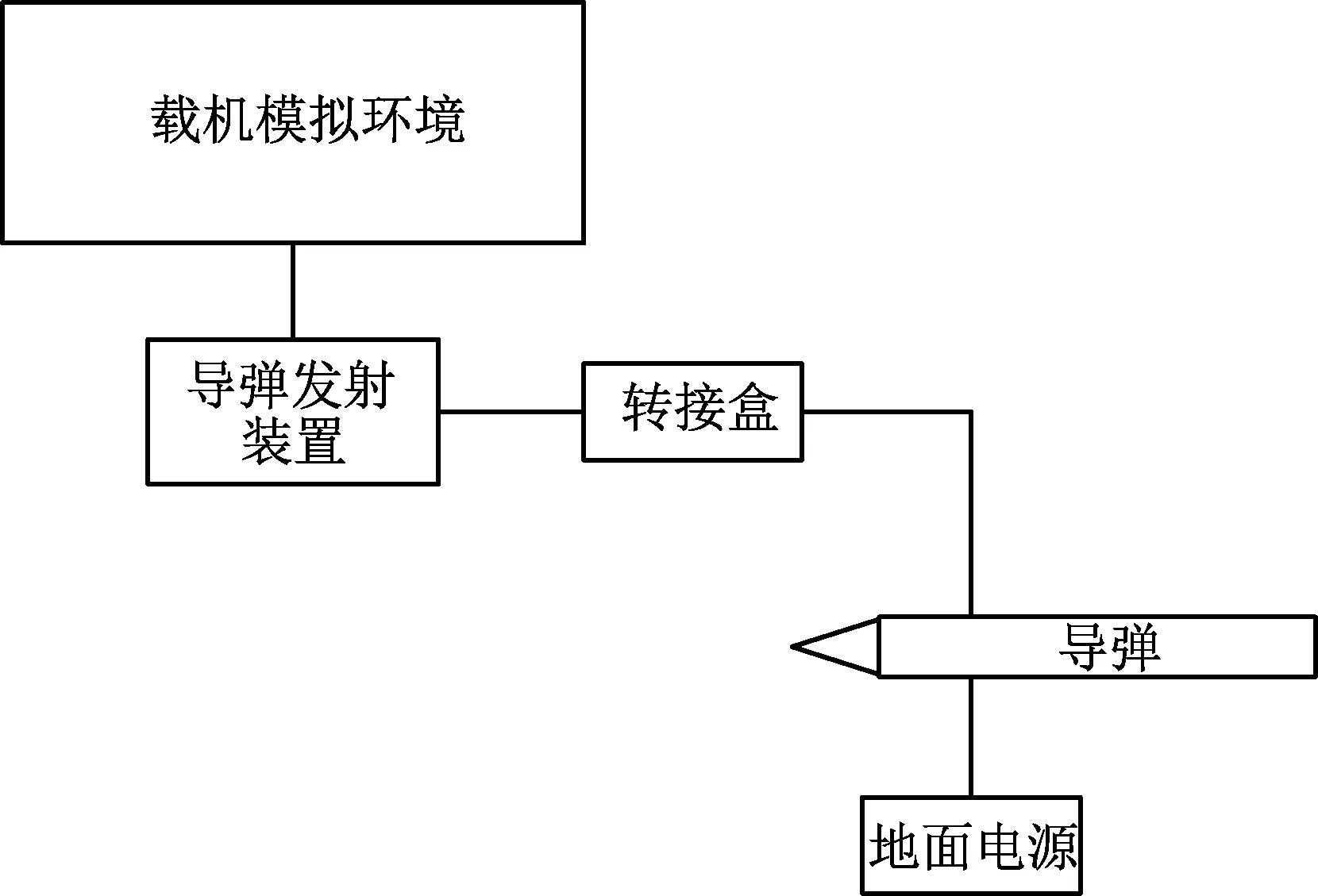
圖8 試驗(yàn)驗(yàn)證連接示意圖Fig.8 Schematic diagram of connection when data link communication is tested
試驗(yàn)時,按照導(dǎo)彈正常作戰(zhàn)流程進(jìn)入導(dǎo)彈發(fā)射程序,通過相應(yīng)開關(guān)操作讓載機(jī)和導(dǎo)彈進(jìn)入發(fā)射后流程,機(jī)彈進(jìn)行雙向數(shù)據(jù)鏈通信。通過對比由真實(shí)導(dǎo)彈、載機(jī)數(shù)據(jù)計算出的波束指向與實(shí)際載機(jī)制導(dǎo)波束指向,對載機(jī)雷達(dá)波束指向的正確性進(jìn)行驗(yàn)證。同時,通過對比載機(jī)火控按照彈道模型解算出的導(dǎo)彈位置與真實(shí)導(dǎo)彈位置,對火控解算精度進(jìn)行驗(yàn)證。
5 結(jié)束語
隨著機(jī)載武器的不斷發(fā)展,其射程變得越來越遠(yuǎn),雙向數(shù)據(jù)鏈通信技術(shù)的重要性日益突顯。本文簡要介紹了數(shù)據(jù)鏈通信的組成與機(jī)理、數(shù)據(jù)鏈通信建立的方法及試驗(yàn)驗(yàn)證手段。實(shí)際應(yīng)用時,還需根據(jù)裝備的具體戰(zhàn)技指標(biāo)要求,結(jié)合工程實(shí)現(xiàn)的能力,對設(shè)計方法加以細(xì)化和優(yōu)化,特別是要滿足實(shí)時性、準(zhǔn)確性的要求,并通過大量的測試與試驗(yàn),逐步達(dá)到最佳效果。