基于GIS/GPS的混合動力牽引車控制策略研究*
2018-11-22 02:34:02熊演峰余強閆晟煜王恒凱
汽車技術 2018年11期
關鍵詞:控制策略
熊演峰 余強 閆晟煜 王恒凱
(1.長安大學,西安 710064;2.中國第一汽車集團有限公司智能網聯開發院,長春 130011)
主題詞:混合動力牽引車 GIS/GPS 動態規劃算法 可預見行駛
1 前言
部分國際商用車企業的混合動力牽引車產品已處于路試階段,而國內混合動力產品主要集中在客車、乘用車領域。根據《節能與新能源汽車產業發展規劃(2012-2020年)》[1],混合動力牽引車屬于節能汽車,不享受新能源汽車補貼,制約其推廣的主要因素是混合動力系統新增成本回收周期過長。我國山區面積占國土面積的69.1%[2],通過地理信息系統(Geographic Information System,GIS)、全球定位系統(Global Positioning System,GPS)提前探知前方道路坡度變化有助于節油,縮短混合動力系統新增成本回收周期。
Erik H等[3-4]探討了傳統牽引車基于坡度的可預見行駛節油機理;Beck R等[5-6]研究了通過簡化模型、縮小可達域實現精簡動態規劃(Dynamic Programming,DP)算法計算量以實現整車應用;王建強等[7]提出將道路分成平路和坡道兩種路況的傳統車實時經濟車速優化方法;Erik H等[8]分析了在傳統牽引車可預見行駛控制策略中增加換擋、車速變化等懲罰因子以減少變速、換擋的可行性;Denggao Huang等[9-10]研究了基于城市循環工況,將等效油耗極值最小函數應用于插電式混合動力客車的控制策略。上述文獻研究主要集中在客車、乘用車、傳統牽引車領域,鮮見基于GIS/GPS的混合動力牽引車控制策略研究。
為了滿足車輛智能駕駛和車隊管理需求,以高精度地圖為代表的GIS和GPS日益普及。本文以某款搭載GIS/GPS的并聯式混合動力牽引車為研究對象,適用DP算法對HEV控制策略模型進行優化,通過理論與實證分析,驗證了算法的有效性與可行性。
2 控制策略開發背景
2.1 測試工況采集與整理
運行工況是混合動力系統構型與整車控制策略制定的基礎。前期采集了25輛牽引車實際運行工況數據,歸類形成了牽引車工況特征數據,如表1所示。
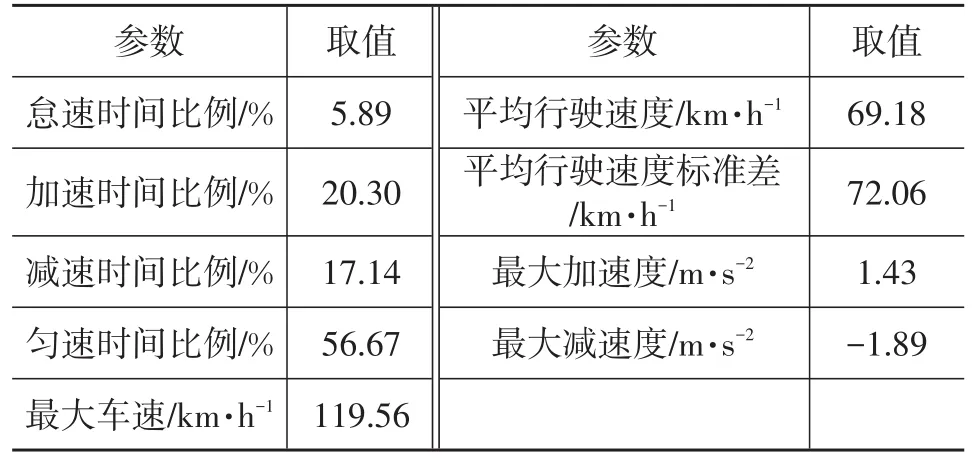
表1 牽引車樣本工況特征
根據概率分布理論[11]處理所采集的運行工況數據,擬合形成了牽引車典型工況特征,如圖1、圖2所示。
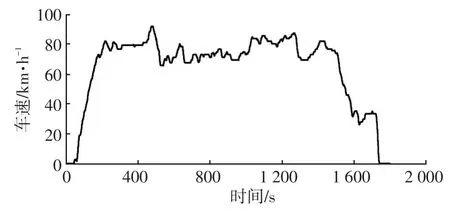
圖1 牽引車車速工況特征
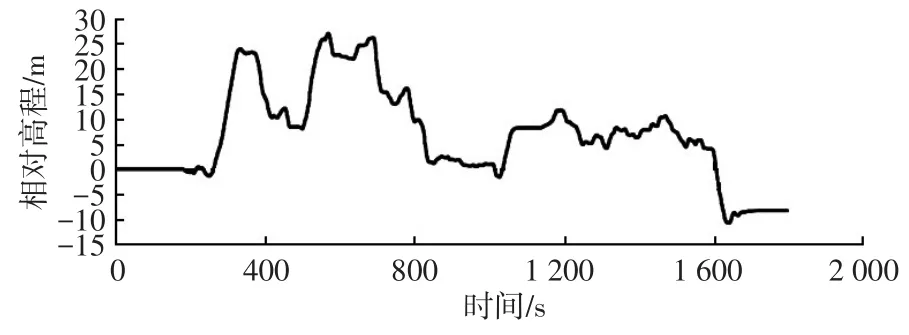
圖2 牽引車相對高程工況特征
結合表1、圖1可見,測試工況牽引車怠速時間比例為5.89%,加速、減速時間比例之和為37.44%,車速多集中在70~80 km/h;由圖2可見,測試工況牽引車最高點與最低點的高程差可達40 m,混合動力牽引車節油機理除行車制動能量回收外,還需充分考慮勢能轉換。
2.2 動力系統構型及主要參數
測試車輛采用P2構型[12],如圖3所示。混合動力系統主要由發動機、離合器、驅動電機、動力電池等部件組成。整車及主要總成參數如表2所示。
3 控制策略模型開發
與傳統混合動力控制策略模型不同,本文提出的控制策略增加了基于GIS/GPS的可預見行駛模塊,其中GIS模塊具有導航電子地圖基礎數據、路徑規劃、地圖匹配等功能,可將當前車輛前方道路坡度、曲率等信息提供給混合動力整車控制器(Hybrid Control Unit,HCU),HCU結合當前混合動力總成狀態和前方道路特征進行扭矩分配和車速規劃,控制策略架構如圖4所示。
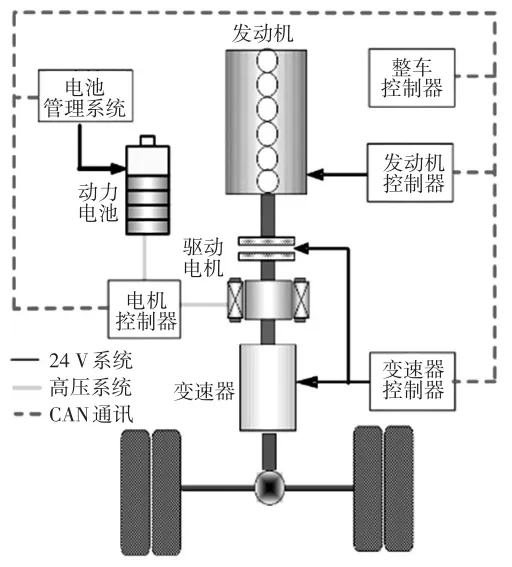
圖3 混合動力牽引車動力系統構型

表2 整車與動力系統主要參數
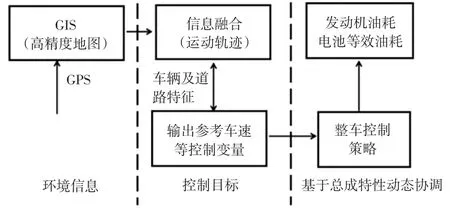
圖4 控制策略開發架構
建立車輛能耗模型和縱向動力學模型,根據GIS/GPS提供的前方道路信息,通過DP算法對兩模型進行尋優計算實時優化,要求運算時間滿足整車實時控制需求。
3.1 策略建模理論基礎
同軸并聯方案采用扭矩建立能耗方程,能耗模型全局優化問題可描述為:將前方可探知道路劃分為若干階段,根據每一階段的行駛扭矩需求,從初始狀態x0到最終狀態xk,搜索最優控制變量uk,使整個循環工況燃油消耗量最小,混合動力系統全局優化的目標函數可表達為:

式中,Q(k)為k時刻混合動力系統等效油耗;Q?fc為發動機燃油消耗率;SO?C為電池在k時刻前后改變值;p為電池電量與油耗的等價常數;Te為發動機輸出扭矩;we為發動機轉速;Tm為電機輸出扭矩;wm為電機轉速。
假定發動機已完全預熱,發動機燃油消耗率視為發動機轉速和扭矩的靜態函數。由式(1)可知,目標函數包括兩部分,第1項是發動機穩態模型的燃油消耗,第2項是電池電量消耗,通過電池電量與油耗的等價常數p將電池電量折算成燃油消耗量。
同軸并聯方案的汽車動力學模型可表達為:
式中,Fw為整車牽引力;ig為變速器速比;i0為后橋主減速比;η為傳動系效率;r為輪胎滾動半徑;m為整車質量;α為道路坡度;f為滾動阻力系數;CD為空氣阻力系數;A為整車迎風面積;ρa為空氣密度;v為車速;δ為旋轉質量系數。
假設離合器、傳動軸等為剛體,將混合動力系統扭矩等價傳遞至輪胎,其與輪胎轉動慣量之和記為J1,ww為車輪轉速,有

將式(2)、式(3)結合,可得:
式中,Je為發動機轉動慣量;Jm為電機轉動慣量。
混合動力牽引車以巡航車速行駛時,依托GIS/GPS探知前方道路出現坡道,進行實時車速優化和扭矩分配,即局部優化。局部優化的理論基礎是Bellman最優化原理[13],通過DP算法實現,無論初始狀態和初始決策如何,當把其中任何一級及其狀態作為初始級和初始狀態時,其余決策必定也是最優策略,因此將局部車速優化和扭矩分配整理為始、末狀態均已知的動態規劃問題。將車輛縱向動力學方程式(4)按空間離散:
系統的代價函數中,從k階段狀態到下一階段狀態的代價Uk和系統總代價Q分別為:
系統約束條件為:
式中,Δs為相應階段內車輛行駛距離;N為系統總步長;Vret為設定車速;ΔV為車速允許波動范圍;SOCmin、SOCmax分別為當前階段電池電量允許可達下限、可達上限;Temin、Temax分別為當前階段發動機扭矩允許可達下限、可達上限;Tmmin、Tmmax分別為當前階段電機扭矩允許可達下限、可達上限。
3.2 節油機理分析
車輛進入可預見行駛模式后求解車速規劃和扭矩分配問題,即在滿足整車扭矩需求和車速在一定區間的前提下,求解某一階段混合動力系統等效油耗最小值。可預見行駛模塊根據極小值原理,采用DP算法求解多級決策優化問題。HCU通過GIS/GPS探知前方道路信息和當前所在位置,以模型預測控制為框架,通過DP逆序算法實現在線滾動優化控制。
實車控制中,HCU可通過動力電池SOC調整及相應電機功率調節主動適應坡道變化,坡道行駛過程中通過減少發動機瞬態變化和途中換擋次數,盡量降低機械制動強度等措施提高節油率。算法基于系統數學模型構建,獲得系統全局最優控制變量,因計算量大,通過牛頓迭代法將系統全局簡化成若干個階段局部優化,同時根據動力總成特征縮小可達域,降低計算量,滿足實時控制需求。
傳統混合動力控制策略僅能針對當前駕駛員意圖和混合動力總成狀態瞬時優化,不能預知未來需求,動力電池在任一時刻需同時滿足制動充電和驅動用電需求,所以充、放電區間較小,不能充分發揮混合動力系統節油潛力。可預見行駛模塊節油機理如圖5所示。
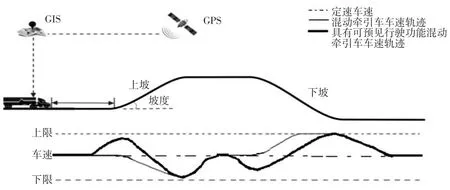
圖5 可預見行駛的混合動力節油機理
傳統車僅有發動機1個動力源,因此可預見節油效果有限。3種類型整車節油機理的對比結果如表3所示。
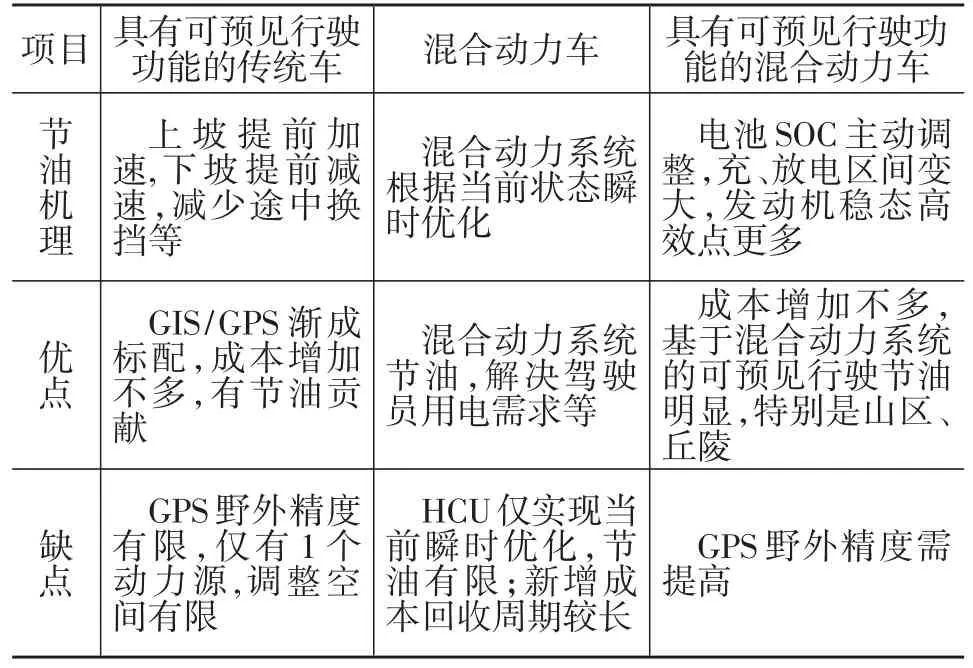
表3 不同類型整車節油機理比較
4 算法流程及道路試驗
4.1 動態規劃算法流程
觸發巡航開關進入可預見行駛模式,GIS/GPS根據當前位置和目的地信息,生成含相對高程和道路曲率的運動軌跡,離散成車輛當前所在采樣點和視距內一系列采樣點,采用牛頓迭代法按道路坡度變化情況對采樣點分段聚類,因當前采樣點與坡度變化所在采樣點狀態已知,通過逆序DP算法可確定下一個采樣點的參考擋位、參考平均車速,并持續滾動更新,流程如下:
a. 模式激活。儀表設有巡航開關,可設定目標車速和車速區間,結合電池電量,試驗車速采用75±10 km/h。
b.運動軌跡聚合歸類。完成初始化激活后,基于GIS/GPS開展路徑規劃,考慮總成能力和計算周期需求,前方探測視距定為2 km,劃分成60個采樣點,其中前1 km每25 m取1個采樣點,后1 km每50 m取1個采樣點。考慮測量精度,當坡度α>1%時視為上坡,當-1%≤α≤1%時視為平路;當α<-1%時視為下坡。根據坡度α的區間分布,將前方60個采樣點聚合成i段(i≥1),聚合歸類后的運動軌跡如圖6所示。
c.控制策略實施:將可預見行駛模式下全局最優控制變量數列簡化成當前采樣點至坡度變化所在采樣點之間的局部最優控制變量數列。當前60個采樣點已聚合歸類成i段運動軌跡,由圖6知,對i=1段,有k個采樣點,根據坡路類別、SOC和車速變化是否覆蓋相對高程變化,開發相應控制策略,如表4所示。
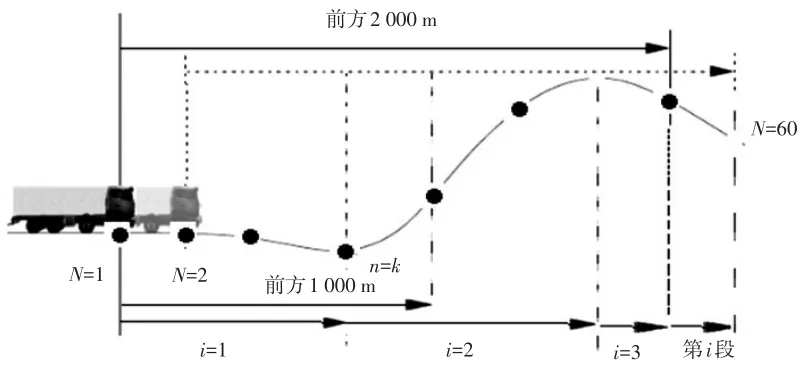
圖6 運動軌跡聚合歸類
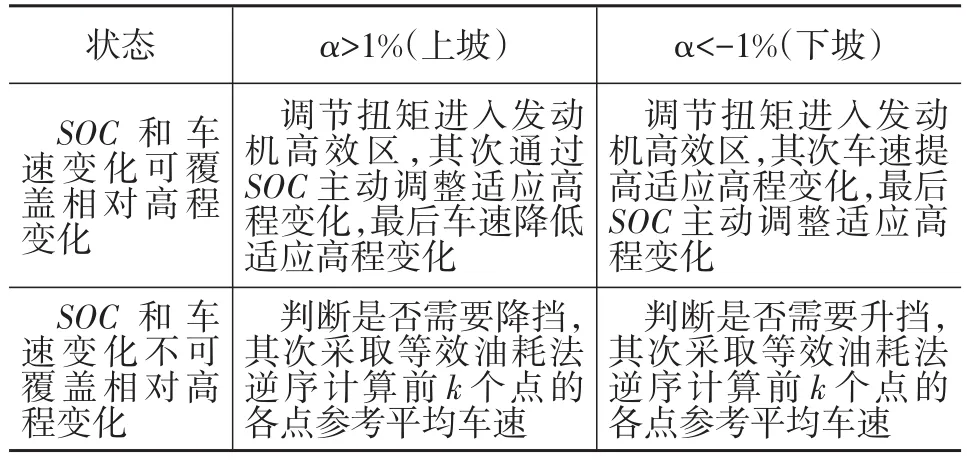
表4 不同路況對應整車控制策略
d.逆序算法尋優:為了簡化動態規劃求解過程,系統狀態變量定義為當前車速與擋位、電池SOC,系統控制變量定義為當前采樣點至下一采樣點目標車速、目標擋位,為了降低計算量,將車速變化簡化為有限網格,取速度間隔Δv=0.3 km/h,如圖7所示。
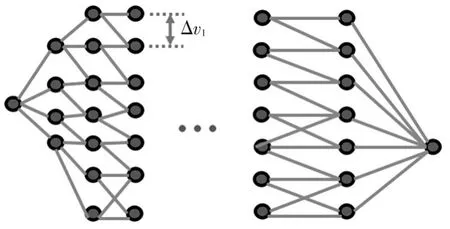
圖7 動態規劃尋優
由于巡航車速設為75±10 km/h,根據表2和式(8),相應擋位速比分別為1.29、1.00和0.78,發動機轉速相應范圍為1 000~2 100 r/min,考慮電池總成特性,SOC區間取30%~90%。通過上述限制,可有效降低DP算法計算量,壓縮計算時間。
在上述條件約束下,計算i=1段,即從第k點開始至第1點結束,計算各采樣點最優解,持續滾動更新即可獲得可預見行駛模式下全局的參考擋位和車速,實現車輛的實時預測控制。
4.2 道路試驗結果
在S102公路長春至樺甸段開展可預見行駛功能的道路試驗。基于國內某地圖公司的高精度地圖完成試驗路段的三維道路信息獲取及坡度計算,如圖8所示。實際道路試驗中,車速、相對高程隨里程的分布如圖9所示。
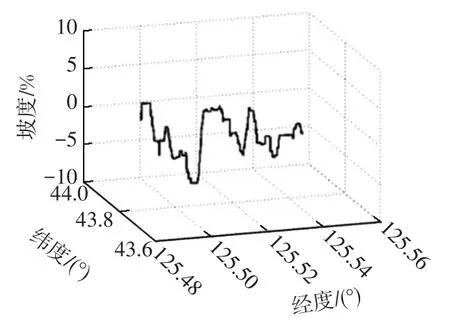
圖8 S102長春-樺甸段經、緯度與坡度聯合分布
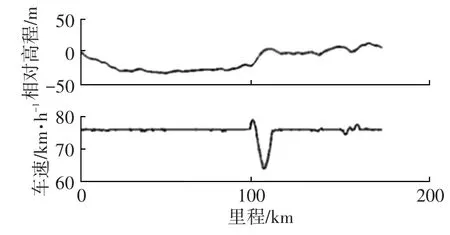
圖9 車速、相對高程的歷程分布
測試路段長度為185.48 km,可預見行駛功能模式下全程平均車速75.6 km/h,運行時間與傳統車相當;混合動力牽引車基礎油耗為34.76 L/100 km,可預見行駛模式下測試油耗為33.09 L/100 km,節油率為4.8%。參照巡航車速和各總成控制周期的需求,最大允許規劃用時小于1 s[14]即可滿足整車需要。不同路況對應規劃用時如表5所示,從表5可知,DP算法運算時間滿足整車實時控制需求。
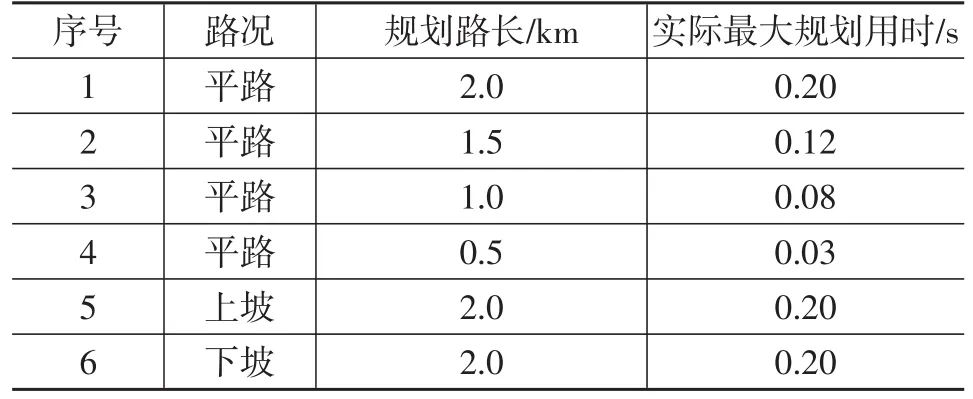
表5 不同路況對應規劃用時
5 結束語
本文分析了基于混合動力系統的可預見行駛節油機理,利用動能和勢能轉化、電池主動充放電、車速主動調整等手段挖掘混合動力系統節油潛力,根據整車和混合動力系統總成狀態壓縮可達域,通過對路徑軌跡聚合歸類、采樣點步長可變等手段縮短DP算法運算時間。試驗結果表明,提出的控制策略有助于提高節油率,運算時間滿足整車實時控制需求。
可預見行駛信號來自于GIS/GPS,而非雷達、攝像頭等傳感器,隨著GIS/GPS的日益普及,新增成本逐步降低,有助于縮短混合動力系統新增成本的回收周期。
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36
