摩擦-電磁耦合制動系統及制動模式切換控制算法研究*
2018-11-22 02:34:10劉志強濮晛
汽車技術 2018年11期
劉志強 濮晛
(江蘇大學,鎮江 212013)
主題詞:制動系統 摩擦-電磁耦合 制動模式 切換控制
1 前言
汽車制動系統普遍存在“熱衰退”問題,為緩解傳統機械制動系統中單一制動執行機構長時間制動導致的“熱衰退”、制動效率降低甚至制動失效等問題,本文在前人研究的基礎上[1],提出一種摩擦-電磁耦合制動系統(下稱耦合制動系統),建立了耦合制動系統混雜控制模型,提出制動模式切換動態協調算法,并運用試驗平臺對控制算法的合理性及制動系統的制動性能進行了試驗研究。
2 耦合制動系統
耦合制動系統結構如圖1所示,該制動系統包含摩擦制動子系統與電磁制動子系統兩部分執行機構,如圖2所示。
耦合制動系統的工作流程為:當駕駛員踩下制動踏板后,通過踏板行程傳感器采集制動踏板位移量,獲取制動踏板加速度信號[2],系統通過加速度信號判斷此時的制動工況;當系統接收到制動信號后,輪速傳感器采集輪速信息并傳遞給車速計算器計算實時車速,以獲取車輛滑移率。電流信號模糊控制器根據滑移率計算電流信號值,經車載蓄電池向摩擦制動子系統和電磁制動子系統中的電磁線圈提供電流。電磁線圈通電后,摩擦制動子系統利用電磁線圈的吸引力推動摩擦制動塊與摩擦制動盤摩擦產生制動力矩;電磁制動子系統利用電磁制動盤在通電線圈磁場中的電磁感應現象產生制動力矩,實現制動。
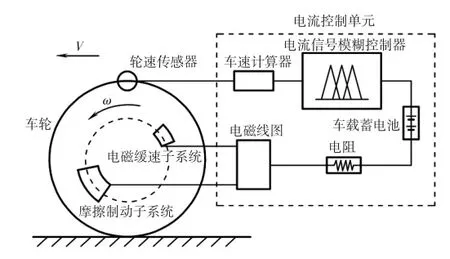
圖1 耦合制動系統結構
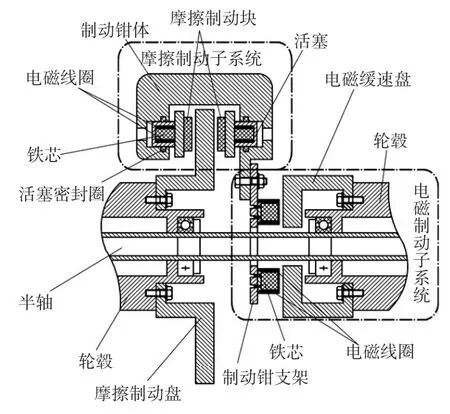
圖2 耦合制動系統執行機構
電流信號模糊控制器(圖3)選用二維模糊控制,以實際滑移率S與最佳滑移率Sc之間的誤差e及偏差變化率e*作為輸入量,以制動執行機構實際所需電流的大小作為輸出,將計算得出的電流輸入耦合制動系統執行機構實現制動調控。耦合制動系統中,摩擦制動子系統與電磁緩速子系統各參數確定后,輸出制動力矩的大小只與電磁線圈輸入電流大小相關,即

式中,Tf為摩擦制動子系統制動力矩;Te為電磁制動子系統制動力矩;I為輸入電流。

圖3 電流信號模糊控制器結構
由上述分析可知,只需控制電流即可實現制動控制,因此耦合制動系統實現了純電控。
3 耦合制動系統的混雜控制模型
3.1 制動模式選擇策略
當駕駛員踩下制動踏板后,根據制動踏板的反饋信號判斷此時車輛制動工況。
3) 遙控啟動。當主機處于備車完畢狀態、控制部位在集控臺時,將集控臺車鐘手柄從停車位置扳向正車(或倒車)任意位置,系統向電噴控制系統發出正車(或倒車)啟動指令,由電噴控制系統控制主機正轉(反轉)啟動。
a. 若制動踏板角加速度大于 500 π(rad/min)2,制動工況為緊急制動,此時制動系統將進入摩擦-電磁制動模式。在該制動模式下,利用摩擦制動滿足制動過程中駕駛員制動需求,利用調節電磁制動力矩大小滿足實際制動過程中駕駛員需求制動力大小的變化。在車輪輪速降至150 r/min前,制動系統一直處于摩擦-電磁制動模式。
b. 若制動踏板角加速度小于500 π(rad/min)2,制動工況為普通制動,此時制動系統進入電磁制動模式,在該制動模式下主要滿足駕駛員制動減速需求。在車輪輪速降低至150 r/min前,制動系統一直處于電磁制動模式。
c.在前兩種制動工況前提下,當車輪輪速降低至150 r/min時,設定為低速制動,此時停止電磁制動,通過摩擦制動完成駕駛員后續的制動需求直至停車。
3.2 制動模式切換混雜模型
將制動過程考慮為混雜系統,利用Petri網對耦合制動系統進行混雜模型構建[2],如圖4所示。圖4中,Pd1表示摩擦制動子系統單獨工作模式;Pd2表示電磁制動子系統單獨工作模式;Pd3表示聯合制動模式;Pc1、Pc2、Pc3表示3 種工作模式對應的連續狀態變化;Td12、Td21、Td13、Td31、Td23、Td32、Tdc1、Tdc2、Tdc3表示離散變遷及連續變遷過程。
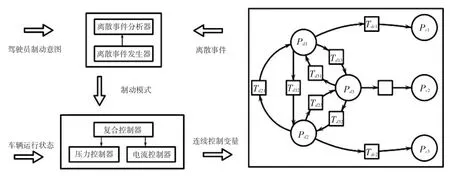
圖4 耦合制動系統Petri網混雜模型
Petri網混雜模型動態行為如下:駕駛員實施制動后,混雜模型記錄汽車實時行駛狀態信息及駕駛員制動意圖,耦合制動系統對制動初始條件進行判斷[3],根據制動模式選擇策略制定耦合制動系統離散變遷的發生規則,并求解出變遷發生后的離散庫,實現不同工況下3種制動模式的選擇和切換。
4 耦合制動模式切換策略
根據制動模式選擇策略,以不同執行機構的運行情況為依據,將控制策略分為摩擦-電磁制動協調主動式控制策略和電磁制動主動式控制策略兩種。
4.1 摩擦-電磁制動協調主動式控制策略
摩擦-電磁制動協調主動式控制策略以摩擦制動為主制動力來源,以電磁制動為輔助制動。若無駕駛員制動意圖干預,摩擦制動力矩隨耦合制動力矩改變,模式切換策略為:

式中,Td為耦合制動力矩。
當駕駛員踩制動踏板的踏板角加速度低于500 π(rad/min)2時,電磁制動子系統單獨工作,控制電磁制動力矩跟隨駕駛員理想制動力矩:
式中,Tr為駕駛員理想制動力矩。
當駕駛員踩制動踏板的踏板角加速度高于500 π(rad/min)2時為摩擦-電磁制動,此時保持電磁制動力矩不變,控制摩擦制動力矩跟隨駕駛員理想制動力矩:

4.2 電磁制動主動式控制策略
電磁制動主動式控制策略以電磁制動為主制動力來源,以摩擦制動為輔助制動。若無駕駛員制動意圖干預,對Te實行分級控制,模式切換策略為:

當處于駕駛員制動意圖干預情況下,通過控制摩擦制動力矩跟隨駕駛員理想制動力矩,并設置閾值[4],若某階段電磁制動力矩超過該設定閾值時,應迅速提高摩擦制動力矩,以補償制動需求。
5 試驗驗證
利用耦合制動系統硬件在環仿真平臺(圖5)對兩種控制策略分別進行試驗。
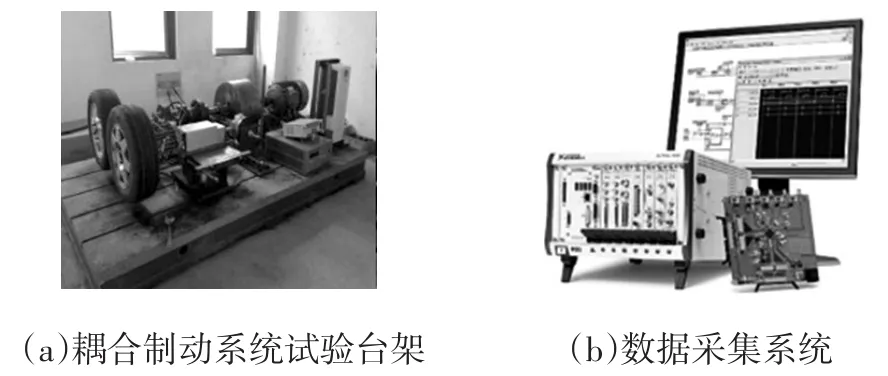
圖5 耦合制動系統硬件在環仿真平臺
5.1 制動模式切換試驗
5.1.1 摩擦-電磁制動主動協調式控制策略試驗
摩擦-電磁制動協調主動式控制策略的驗證試驗設計了3種工況,工況1為制動系統從摩擦-電磁制動模式切換為摩擦制動模式;工況2為制動系統從電磁制動模式切換為摩擦制動模式;工況3為制動系統從摩擦制動模式或電磁制動模式切換為摩擦-電磁制動模式。
工況1下的試驗曲線如圖6所示。由圖6可看出,在制動至約0.4 s時(試驗設定切換時間)制動模式切換開始,在0.8 s時完成切換,持續約0.4 s。期間,輪缸壓力稍有提高,通過部分摩擦制動力矩補償了電磁制動力矩的降低。在切換過程中耦合制動力矩始終處于平穩輸出狀態。
圖7為工況2試驗曲線。由圖7可看出,在制動至約0.3 s時開始制動模式的切換,切換過程中液壓缸壓力逐漸提高,摩擦制動力矩逐漸增大,同時,電流逐漸減小,電磁制動力矩在0.5 s時耦合降低至0。整個過程持續0.2 s,僅在0.5 s時耦合制動力矩有小幅度的跳躍,切換過程中耦合制動力矩變化平穩。
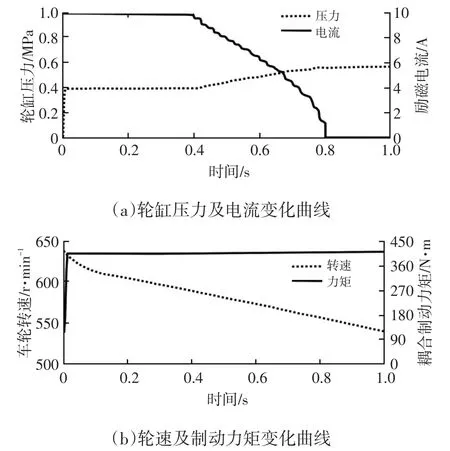
圖6 工況1試驗曲線
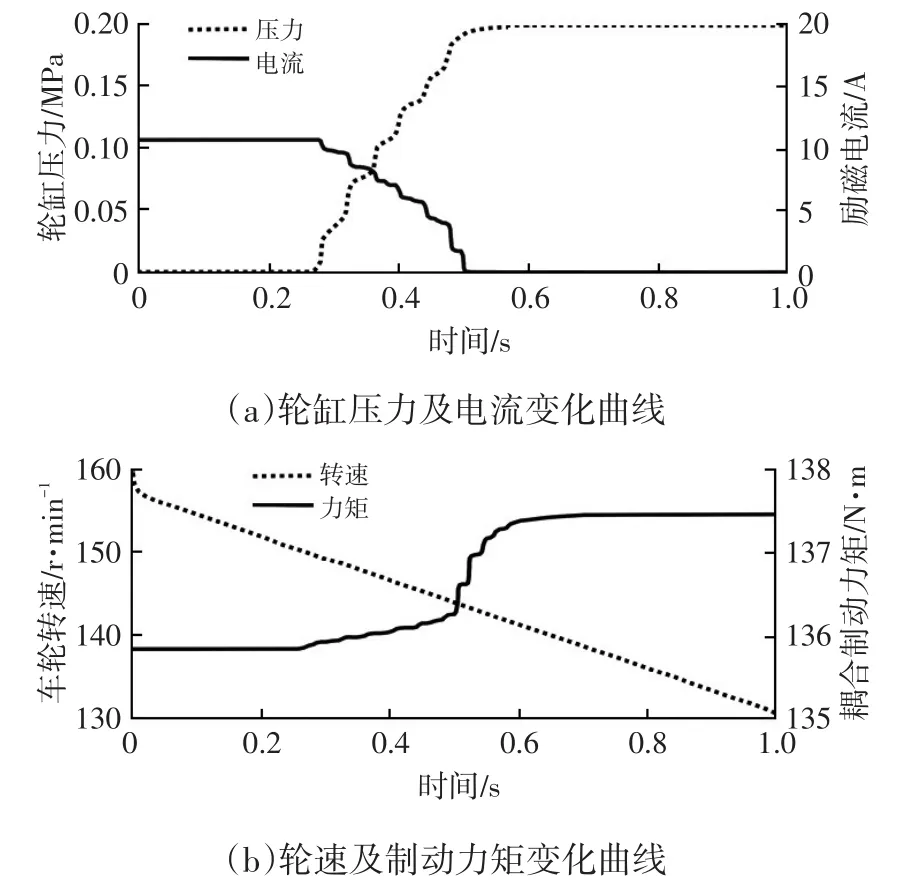
圖7 工況2試驗曲線
圖8 為工況3試驗曲線。由圖8可看出,在1.2 s時開始制動模式切換,3 s左右摩擦制動力矩停止變化,電磁制動力矩仍處于逐漸增大的過程中。可以看出,該試驗工況下可以優化控制策略,協調輪缸壓力與電流的變化情況,使二者保持同頻率變化。
整個試驗過程中,選取了較高的路面附著系數模擬值,制動模式切換時制動系統整體沒有發生失衡的危險,且在試驗過程中能夠保持車輪的實際滑移率小于路面最佳滑移率。
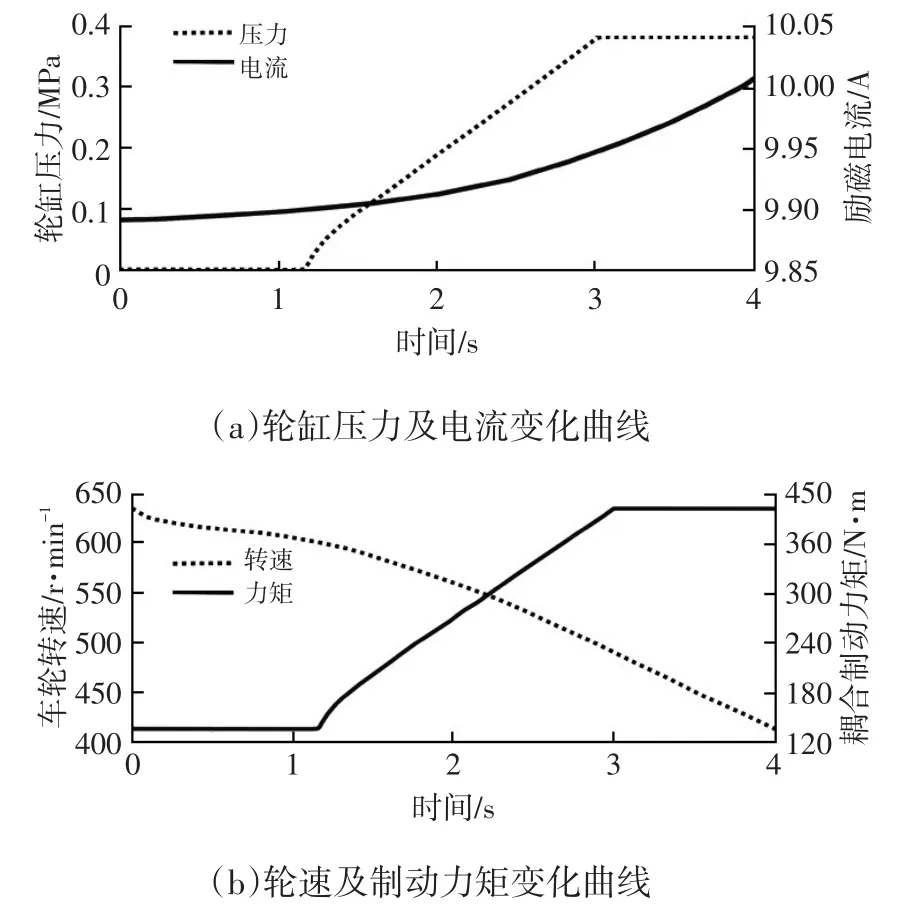
圖8 工況3試驗曲線
5.1.2 電磁制動主動式控制策略試驗
電磁制動主動式控制策略的驗證試驗工況為制動系統從摩擦制動模式或電磁制動模式切換為摩擦-電磁制動模式,該工況下的試驗結果如圖9所示。由圖9可看出,制動輪缸僅有4次增壓,電流也僅有4次變化,說明摩擦制動與電磁制動力矩響應十分迅速;而圖8中,制動輪缸壓力及電流大小在模式切換過程中持續變化,處于連續工作狀態。因此,可認為電磁制動主動式控制策略與摩擦制動主動式控制策略相比,優化了輪缸壓力和電流大小的變化曲線,控制效果更優。

圖9 工況3基于改進算法試驗曲線
5.2 低附著路面和對接路面制動試驗
在CarSim中建立整車模型,聯合Matlab/Simulink和CarSim對耦合制動系統進行動力學仿真,仿真參數見表1。分別在低附著路面和對接路面的制動工況下,分析制動過程中車輪滑移率、制動效能和制動穩定性。

表1 仿真參數
低附著彎道路面制動過程如圖10所示。設置路面附著系數為0.4,0.2 s時開始制動,0.5~0.6 s時轉向盤轉角由0°轉至180°。
圖10中,4個車輪的滑移率在制動過程中均穩定在20%左右。制動系統在轉向制動初始階段快速啟用耦合制動模式,調節制動力使滑移率迅速收斂穩定至理想滑移率附近,保證制動過程的穩定性。
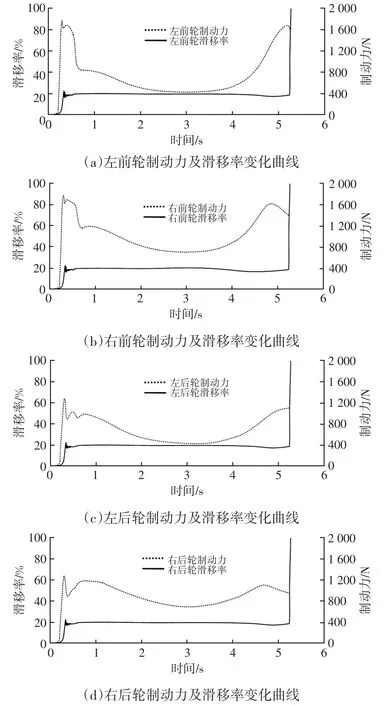
圖10 低附彎道路面制動過程
圖11 為車輛在低附著彎道路面的制動性能,質心側偏角變化范圍為-12.5°~8.5°。當側向加速度最大值為0.30 m/s2時輪胎達到路面附著極限,縱向加速度隨側向加速度的增加而減小,縱向加速度和側向加速度的變化引起車輪載荷的變化,導致制動力的變化曲線呈凹型拋物線。平均制動強度為0.3 m/s2,縱向車速迅速下降,體現了良好的制動效能。
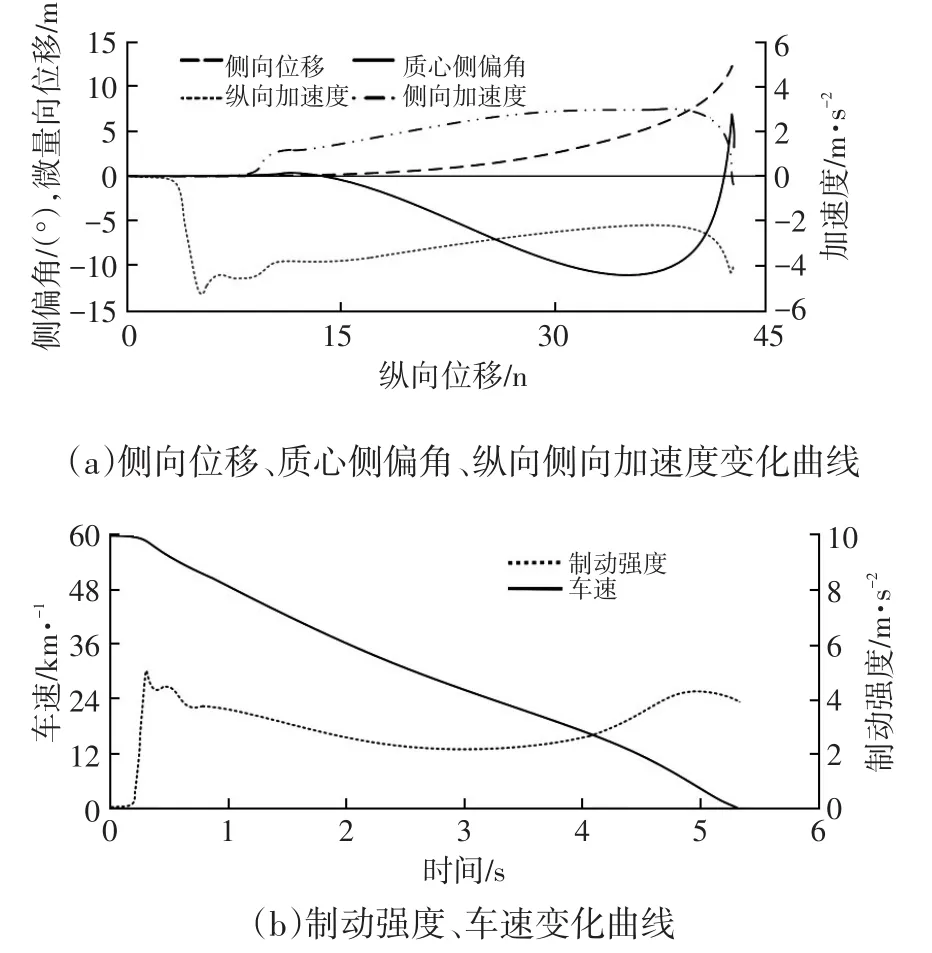
圖11 低附著彎道路面制動性能
對接直行路面制動過程如圖12所示,對接路面設定為高附著路面躍變到低附著路面,再躍變到高附著路面,附著系數分別設為0.6、0.2。

圖12 對接直行路面制動過程
由圖12可知,4個車輪的滑移率均保持在20%附近,當路面附著系數突變時,出現輕微波動后迅速恢復穩定。制動力僅在附著系數突變時出現波動,在穩定路段變化平穩,實現了連續制動控制,提高了制動響應能力。
圖13為車輛對接直行路面制動性能,由圖13可看出,質心側偏角、側向位移、側向加速度均在0附近,制動穩定性良好;縱向加速度隨路面附著系數的變化保持在峰值附近,且變化反應迅速平穩,體現了良好的制動效能和制動響應。縱向車速和制動強度在路面附著系數變化的兩點處有同樣的變化趨勢,平均制動強度為0.5 m/s2,制動性能良好。

圖13 對接直行路面制動性能
6 結束語
為實現電控制動,提出一種摩擦-電磁耦合制動系統及其制動模式切換控制算法。根據摩擦-電磁耦合制動系統結構,設計了耦合制動系統混雜控制模型,提出制動模式切換動態協調算法并對算法進行了改進。通過試驗平臺對控制算法和制動系統性能進行了仿真,結果表明,制動模式切換動態協調算法保證了耦合制動系統在制動模式切換時的穩定性,摩擦-電磁耦合制動系統制動性能良好,提高了制動舒適性。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
山東冶金(2019年3期)2019-07-10 00:54:04
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
消費導刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(2017年9期)2017-09-26 03:41:45
通信電源技術(2016年1期)2016-04-16 04:57:26
