農(nóng)業(yè)空間耕地和永久基本農(nóng)田保護(hù)現(xiàn)狀評估
——以龍陵縣為例
2022-02-24 03:27:14□張青
山西農(nóng)經(jīng) 2022年3期
關(guān)鍵詞:基本農(nóng)田耕地
□張 青
(云南省地礦測繪院,云南 昆明 650000)
“三類空間”是指城鎮(zhèn)空間、農(nóng)業(yè)空間和生態(tài)空間。城鎮(zhèn)空間是指以城鎮(zhèn)居民生產(chǎn)生活為主體功能的區(qū)域,主要承擔(dān)城鎮(zhèn)建設(shè)和城鎮(zhèn)經(jīng)濟(jì)發(fā)展等功能,重點進(jìn)行城市建設(shè)、城鎮(zhèn)建設(shè)和經(jīng)濟(jì)建設(shè)。農(nóng)業(yè)空間是指以農(nóng)業(yè)生產(chǎn)和農(nóng)村居民生活為主體功能,承擔(dān)農(nóng)產(chǎn)品生產(chǎn)和農(nóng)村生活功能,保障國家糧食安全的核心區(qū)域,主要包括永久基本農(nóng)田、一般農(nóng)田等農(nóng)業(yè)生產(chǎn)用地,以及村莊等農(nóng)村生活用地。生態(tài)空間是指維護(hù)區(qū)域生態(tài)系統(tǒng)安全、保護(hù)自然資源、保障水資源安全、保全生物多樣性、維護(hù)自然生境的核心區(qū)域,主要承擔(dān)生態(tài)服務(wù)和生態(tài)系統(tǒng)維護(hù)功能[1]。
1 研究區(qū)概況與數(shù)據(jù)來源
1.1 研究區(qū)概況
龍陵縣地處云南西部邊陲,位于龍川江和怒江之間,地跨東經(jīng) 98°25′~99°11′、北緯 24°07′~24°50′。龍陵地貌因高黎貢山山脈從北向南延伸進(jìn)入縣境,怒江在東、龍川江在西北夾持奔流南下,形成上緊下疏、中部高、向兩側(cè)河谷傾斜的北高南低地形。境內(nèi)山嶺縱橫、丘陵起伏、山高谷深,河流與山脈相間排列。境內(nèi)最高海拔為3 001.6 m(雪山主峰),最低海拔535 m(萬馬河口),相對高差2 466.6 m。縣境東西最大橫距64 km,南北最大縱距78 km,土地總面積2 793.45 km2。下轄龍山鎮(zhèn)、鎮(zhèn)安鎮(zhèn)、勐糯鎮(zhèn)、木城鄉(xiāng)、平達(dá)鄉(xiāng)、象達(dá)鎮(zhèn)、龍新鄉(xiāng)、碧寨鄉(xiāng)、臘勐鎮(zhèn)、龍江鄉(xiāng),共 5 鎮(zhèn) 5 鄉(xiāng)。70 個村民委員會,46 個社區(qū)村民委員會,5 個社區(qū)居民委員會,1 642 個村民小組,49 個城鎮(zhèn)居民小組。2019 年,地區(qū)生產(chǎn)總值1 084 637 萬元,常住人口293 941 人,城鎮(zhèn)常住人口87 808 萬人,農(nóng)村常住人口206 133 人,城鎮(zhèn)化率29.87%。人均耕地面積約0.11 hm2/人。
1.2 數(shù)據(jù)來源
文章圖像數(shù)據(jù)主要來源于2019 年龍陵縣第三次土地調(diào)查更新成果,社會經(jīng)濟(jì)數(shù)據(jù)主要來源于《2019 年龍陵縣統(tǒng)計年鑒》。
2 研究方法
文章主要采用統(tǒng)計分析、對比分析及基于ArcGis的數(shù)據(jù)疊加分析等方法,對龍陵縣2009—2019 年的耕地資源情況、2017 年永久基本農(nóng)田劃定情況與2019 年“三調(diào)”數(shù)據(jù)的疊加成果進(jìn)行分析。
3 結(jié)果分析
3.1 耕地資源現(xiàn)狀評估
3.1.1 耕地資源現(xiàn)狀數(shù)量及質(zhì)量
龍陵縣現(xiàn)狀耕地從圖1、2、3 地類構(gòu)成看,近65%為旱地,其中臘勐鎮(zhèn)、碧寨鄉(xiāng)、勐糯鎮(zhèn)均超過80%;其次為木城鄉(xiāng)和平達(dá)鄉(xiāng),亦高達(dá)74.17%和70.53%;旱地占比相對較少的是龍江鄉(xiāng),占比為13.83%;其他鄉(xiāng)鎮(zhèn)旱地面積占比約為其耕地面積的1/2;水澆地面積極少,主要集中在勐糯鎮(zhèn);水田則主要集中分布于龍江鄉(xiāng),其次龍山鎮(zhèn)和象達(dá)鎮(zhèn),但這幾個鄉(xiāng)鎮(zhèn)內(nèi)分布相對零散;臘勐鎮(zhèn)水田面積占比最小,為9.54%。
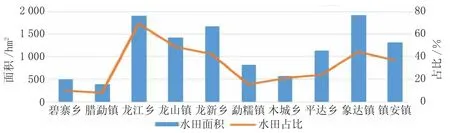
圖1 水田分布情況圖
龍陵縣坡耕地占比較大,耕地質(zhì)量總體偏低,農(nóng)業(yè)機(jī)械化耕作難度大。2019 年,全縣坡度小于6°的耕地面積占耕地總面積的9.26%;6°~15°耕地面積占25.56%;15°~25°耕地面積占 35.38%;25°以上耕地面積占29.80%。從耕地坡度級別分布看出,耕地主要分布在緩坡和陡坡地帶,坡地坡度情況,如圖4 所示。
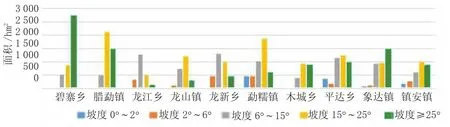
圖4 耕地坡度情況圖
耕地破碎化嚴(yán)重,碎小耕地地塊斑塊數(shù)占比大,集中連片度不高,再加上地理位置等因素限制,使機(jī)械化耕作難度大,生產(chǎn)成本高。全縣農(nóng)業(yè)生產(chǎn)使用的機(jī)械主要用在翻地、碎土、加工和貯存環(huán)節(jié)。需要大量勞動力的采摘環(huán)節(jié)依然以人工畜力為主。近年來,雖然實施了一批高標(biāo)椎農(nóng)田建設(shè)、精準(zhǔn)扶貧農(nóng)村道路硬化等措施,但機(jī)械化程度仍不能滿足現(xiàn)代產(chǎn)業(yè)發(fā)展需要。從耕地連片度數(shù)據(jù)與分析結(jié)果來看,全縣耕地斑塊破碎,表現(xiàn)為單塊面積小于0.67 hm2的地塊約占總地塊的69%,單塊面積大于3.33 hm2的地塊僅占6.66%;耕地破碎化較為嚴(yán)重,給農(nóng)業(yè)產(chǎn)業(yè)化帶來較大影響。龍陵縣耕地連片度統(tǒng)計情況,如表1 所示。
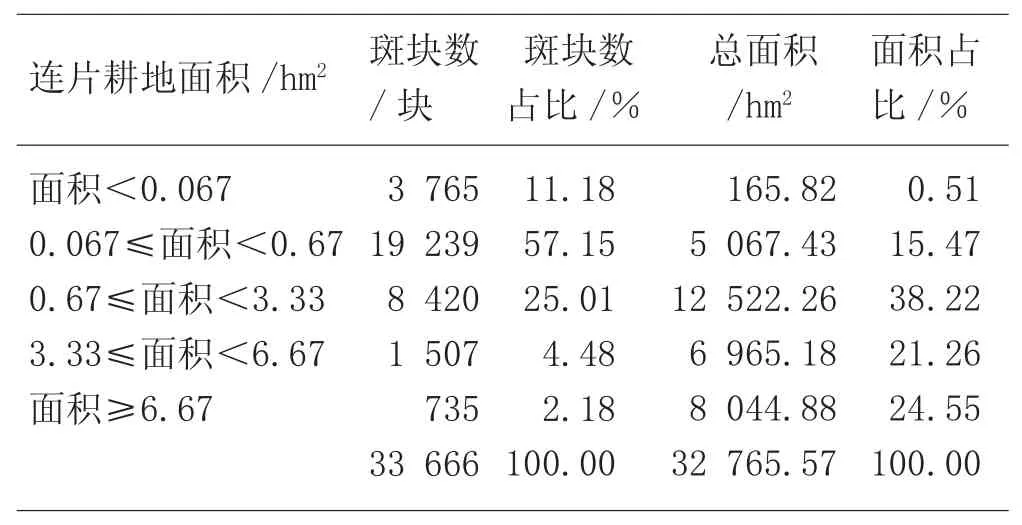
表1 龍陵縣耕地連片度統(tǒng)計表
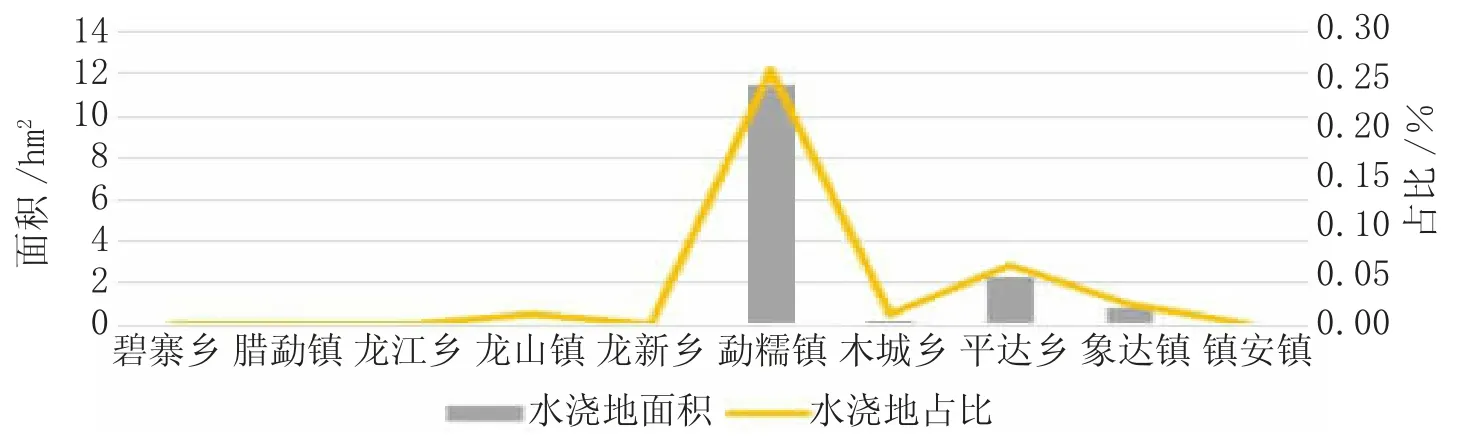
圖2 水澆地分布情況圖
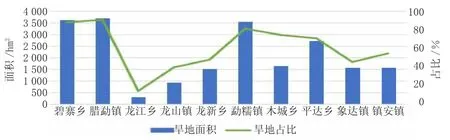
圖3 旱地分布情況圖
3.1.2 耕地資源變化情況分析
耕地總量減少,但質(zhì)量總體變化不大。從2009—2019 年耕地總量變化來看,龍陵縣耕地共計減少了12 776.71 hm2;從地類構(gòu)成看,水田占比從2009 年的34.96%增加至2019 年“三調(diào)”的35.57%。從山壩分布看,0°~2°占比從 2009 年的 5.39%增加至 2018 年的6.25%,2019 年降低至 3.56%;2°~6°占比從 2009 年的3.31%增加至2019 年的5.70%。耕地減少的主要原因是2009—2019 年間龍陵縣退耕還林還草等生態(tài)建設(shè)實施力度加大、農(nóng)業(yè)結(jié)構(gòu)調(diào)整、耕地撂荒、因災(zāi)損毀、建設(shè)占用等。全縣耕地減少量主要流向林地及園地。
即可恢復(fù)和工程恢復(fù)土地占耕地減少數(shù)量的75%以上。根據(jù)2019 年“三調(diào)”時點更新數(shù)據(jù),種植屬性名稱為即可恢復(fù)的土地面積有1 028.29 hm2,其中99.97%的即可恢復(fù)為其他園地,主要分布在象達(dá)鎮(zhèn)、龍山鎮(zhèn)。種植屬性名稱為工程恢復(fù)的土地面積大約有8 629.92 hm2,以園地和林地為主,其中園地面積約有5 048.97 hm2,占工程恢復(fù)的58.5%,各鄉(xiāng)鎮(zhèn)均有分布,主要分布在勐糯鎮(zhèn)、鎮(zhèn)安鎮(zhèn)及龍江鄉(xiāng);林地面積約有3 510.22 hm2,占工程恢復(fù)的40.67%,主要分布在龍新鄉(xiāng)、象達(dá)鎮(zhèn)、鎮(zhèn)安鎮(zhèn)及龍江鄉(xiāng)。
3.2 永久基本農(nóng)田保護(hù)情況
3.2.1 永久基本農(nóng)田“非耕化”情況
將2017 年劃定備案的永久基本農(nóng)田保護(hù)地塊與“三調(diào)”成果疊加分析,目前仍符合永久基本農(nóng)田保護(hù)要求的土地為21 918.96 hm2,其中耕地20 671.15 hm2、園地1 247.81 hm2。龍陵縣永久基本農(nóng)田非耕化共計14 947.37 hm2,永久基本農(nóng)田范圍內(nèi)“非耕”面積約占其總面積的40%“。非耕”主要體現(xiàn)為農(nóng)用地內(nèi)部調(diào)整。“非耕”地中近80%為農(nóng)用地,其中林地占比最大,約為74%;其次園地占23%;建設(shè)用地占永久基本農(nóng)田數(shù)量跟林地、園地占用永久基本農(nóng)田相比,數(shù)量不大。
3.2.2 永久基本農(nóng)田“非耕”化情況較為突出的原因
“三調(diào)”與“二調(diào)”地類判定內(nèi)涵差異。按照“三調(diào)”工作系列技術(shù)要求和具體地類判定要求,“三調(diào)”與“二調(diào)”工作的銜接可理解為“對已有內(nèi)容的細(xì)化、變化內(nèi)容的更新、新增內(nèi)容的補(bǔ)充、錯漏內(nèi)容的糾正”,按照國家“三調(diào)”辦7 號文件要求,在“二調(diào)”耕地中“臨時種植園木、臨時種植林木、臨時坑塘、臨時園藝、速生林木和綠化草地”等地塊不再按照耕地調(diào)查,按實地現(xiàn)狀調(diào)查為種植園地或?qū)?yīng)的相關(guān)林地、草地,導(dǎo)致部分原劃定為永久基本農(nóng)田的耕地此次被調(diào)查為種植園地或林地。
年度變更模式本身存在的局限。基于“二調(diào)”調(diào)查成果的歷年年度變更主要分為自上而下的下發(fā)指定變更圖斑和自下而上的自主提取變更圖斑變更的模式操作,且兩類變更圖斑大多數(shù)都為農(nóng)用地至城鎮(zhèn)和交通水利建設(shè)用地的變更。即農(nóng)業(yè)地內(nèi)部結(jié)構(gòu)調(diào)整的變化在變更數(shù)據(jù)庫中體現(xiàn)不明顯,另外新增農(nóng)村居民點占用耕地建設(shè)現(xiàn)象雖然突出,但是受年度違法占耕比例(15%)的超限懲處限制,年度變更存在不敢變更、不愿變更或漏變更的情況,此次基于“三調(diào)”的相關(guān)要求,據(jù)實調(diào)查,反應(yīng)出的新增城鄉(xiāng)建設(shè)用地占用永久基本農(nóng)田的量超200 hm2。
農(nóng)業(yè)種植結(jié)構(gòu)調(diào)整。龍陵縣永久基本農(nóng)田“非耕”地塊以農(nóng)用地內(nèi)部調(diào)整為主,表現(xiàn)為耕地流向至林地和園地。近年來,隨著全縣大力發(fā)展高原特色農(nóng)業(yè),較傳統(tǒng)糧作種植相比,為農(nóng)民提供了廣闊的空間,使得時鮮特色水果和道地藥材得到大面積推廣種植。在此種植結(jié)構(gòu)調(diào)整下,經(jīng)濟(jì)作物和生物資源的大力發(fā)展,占用不少耕地,使得部分耕地流向種植園地。
拋荒致使自然退耕。大量勞動力外出務(wù)工、致使耕地長年閑置荒蕪?fù)烁?jù)調(diào)查,近10 年來,全縣人口持續(xù)流動,且流動趨勢有所增加,加之因縣域內(nèi)缺乏效益較好的勞動密集型產(chǎn)業(yè)支撐,不能滿足當(dāng)?shù)剞r(nóng)村勞動力就業(yè)需求,絕大部分15~60 歲農(nóng)村勞動力為消除自家貧困狀況,紛紛走上外出務(wù)工之路,且外出務(wù)工逐年上升,將自家承包土地交由年邁的老人或轉(zhuǎn)租于親戚耕種管理,沒有老人或親戚不愿租種地,常年累月荒蕪、缺乏管理,導(dǎo)致自然退耕、灌木叢生。
傳統(tǒng)家庭分散耕種模式、低效糧食種植致使失去種植積極性。據(jù)調(diào)查,以水稻種植為例,正常情況下,農(nóng)民耕種667 m2田地,需300 元左右墾田費(fèi)、300 元左右的種子、農(nóng)藥、化肥、農(nóng)膜、水費(fèi)及200 元左右的雇工費(fèi)用,累計成本800 元左右;年景好的話,種667 m2中稻,按收獲600 kg 計算,可以賣1 500 元左右,加上人工和日常管理精力,基本處于虧本狀態(tài);加上全縣普遍分散的耕地地塊分布格局,使得農(nóng)田水利建設(shè)成本極高,因農(nóng)民不愿長期、大規(guī)模種植糧食作物,經(jīng)濟(jì)作物種植又沒有市場保障,耕地自然荒蕪?fù)烁?/p>
4 結(jié)論與建議
第一,耕地面積不斷縮減,耕地保有量目標(biāo)需根據(jù)龍陵縣實際情況下達(dá)。從歷年變化趨勢看,耕地逐年減少,且減少的耕地流向林地、園地,使耕地保護(hù)與利用矛盾突出。2019 年龍陵縣耕地面積數(shù)量低于《龍陵縣土地利用總體規(guī)劃(2015—2020 年)調(diào)整完善成果》中2020 年耕地保有量目標(biāo),耕地底線控制風(fēng)險較高。第二,坡耕地占比較大,耕地質(zhì)量總體偏低。6°以下耕地及永久基本農(nóng)田面積均約為其面積的1/10,0.67 hm2以下耕地圖斑數(shù)量占63%,山區(qū)耕地面積占比大。第三,永久基本農(nóng)田指標(biāo)、布局亟待優(yōu)化調(diào)整。“三調(diào)”現(xiàn)狀未納入永久基本農(nóng)田的耕地約11452hm2,扣除25°以上、生態(tài)紅線內(nèi)、城鎮(zhèn)開發(fā)邊界(初劃)內(nèi)、河道不穩(wěn)定以及現(xiàn)階段梳理的部分建設(shè)必須避讓等部分后約6 094 hm2。
綜合以上,現(xiàn)有耕地數(shù)量減少、永久基本農(nóng)田內(nèi)“非耕”占比和現(xiàn)狀未納入永久基本農(nóng)田耕地數(shù)量、布局情況,全縣耕地保有量目標(biāo)的合理確定及現(xiàn)有永久基本農(nóng)田布局,亟須銜接現(xiàn)狀耕地分布及生態(tài)紅線、城鎮(zhèn)開發(fā)邊界及其他相關(guān)專題專項研究,進(jìn)行重新分配下達(dá)總量指標(biāo)和優(yōu)化調(diào)整地塊布局。
猜你喜歡
今日農(nóng)業(yè)(2022年13期)2022-11-10 01:05:49
北京測繪(2021年12期)2022-01-22 03:33:36
今日農(nóng)業(yè)(2021年9期)2021-11-26 07:41:24
今日農(nóng)業(yè)(2021年14期)2021-11-25 23:57:29
自然資源信息化(2019年4期)2019-03-29 03:20:46
小學(xué)生必讀(低年級版)(2018年9期)2018-12-13 01:17:06
山東畫報(2017年9期)2017-04-29 00:44:03
浙江國土資源(2016年7期)2016-06-15 20:30:07
浙江國土資源(2015年5期)2015-05-09 08:19:05
浙江國土資源(2015年1期)2015-05-09 08:10:56