基于RS碼的某運載火箭圖像測量系統設計與實現
2018-11-28 09:20:18,,,
計算機測量與控制 2018年11期
,,,
(1.上海宇航系統工程研究所,上海 201109; 2.上海航天電子技術研究所, 上海 201109)
0 引言
近幾年,中國運載火箭迎來高密度發射期,為更好的掌握火箭飛行試驗過程的狀態信息,深入了解產品性能,提高產品的可靠性,豐富傳統測試手段,伴隨5 Mbps、10 Mbps以及更高碼率傳輸體制[1-2]的應用為基礎,圖像視頻測量技術越來越多的被使用。
測試場地的變化、發射衛星不同、飛行過程中火焰擾動等干擾因素的存在,可能造成圖像信道誤碼,地面解調時出現馬賽克、花屏、卡頓的現象。給出一種基于RS碼的圖像測量系統設計方案,能有效改善信道誤碼、提高信道增益[3-4],有效提高圖像畫質質量。
1 RS碼時域編碼方法
對于RS(n,K)碼,假定:
待編碼的信息碼矢M為:
M=[Mk-1Mk-2…M1M0]
(1)
即信息多項式M(x)為:
(2)
C=[Ck-1Ck-2…C1C0]
(3)
即碼字多項式C(x)為:

g(x)=∏(x-αi)=(x-α)(x-α2)…(x-α(2t))
(4)
編碼時,用xn-kM(x)除以g(x),所得余數r(x)是校驗多項式,將r(x)置于信息多項式M(x)之后,就形成RS碼,由4所示。
C(x)=xn-kM(x)+r(x)
=xn-kM(x)+xn-kM(x)mod(g(x))
(5)
式中,

RS碼為:
伊恩·羅蘭的悲壯犧牲幾乎使斯通的探險計劃成為泡影。一個隊員護送伊恩的尸體回蘇格蘭。其余的隊員都憤怒地指責斯通,說他作為隊長,對洞穴著了迷,工作熱心得過了頭。一時間,探察隊里人們的關系緊張起來。幸好經過會議表決后,剩下的隊員都同意留下,但他們要求攝影師韋斯·史基爾斯把洞穴已知部分用文字記錄下來。
C=[Cn-1Cn-1 …C1C0]=
[Mk-1Mk-2 …M0rn-k-1rn-k-2…r0]
(6)
其中信息位為前k位,校驗位為后n-k位,這個算法為RS碼的時域編碼算法[5-8],步驟可以歸納為:
1)用xn-k乘以信息多項式M(x),,得到xn-kM(x);
2)用xn-kM(x)除以生成多項式g(x),取其余式,得到校驗多項式r(x);
3)聯合信息多項式M(x)和校驗多項式r(x),得到碼字多項式C(x)。
圖像測量系統碼流格式除去子幀同步碼和子幀計數,一個子幀有效數據為184 byte,校驗長度選擇16 byte ,采用RS(184,168)格式進行編碼,信道利用率可達到91%,滿足圖像傳輸要求。
2 圖像測量系統設計
圖像測量系統用于監測火箭飛行過程中的關鍵事件,由攝像機、圖像壓縮編碼器、發射機、天線、電池、配電器等組成。圖像壓縮編碼器將攝像頭送入的圖像數據進行數據采集壓縮、RS編碼、數據綜合編幀形成PCM碼流,通過發射機調制后,由天線進行信號發射下傳。圖像測量系統原理框圖如圖1所示。
圖像測量系統采用S波段點頻,PCM-FM調制體制。文中將對攝像機和圖像壓縮編碼器設計原理進行介紹,傳統遙測傳輸體制設計不做過多闡述。
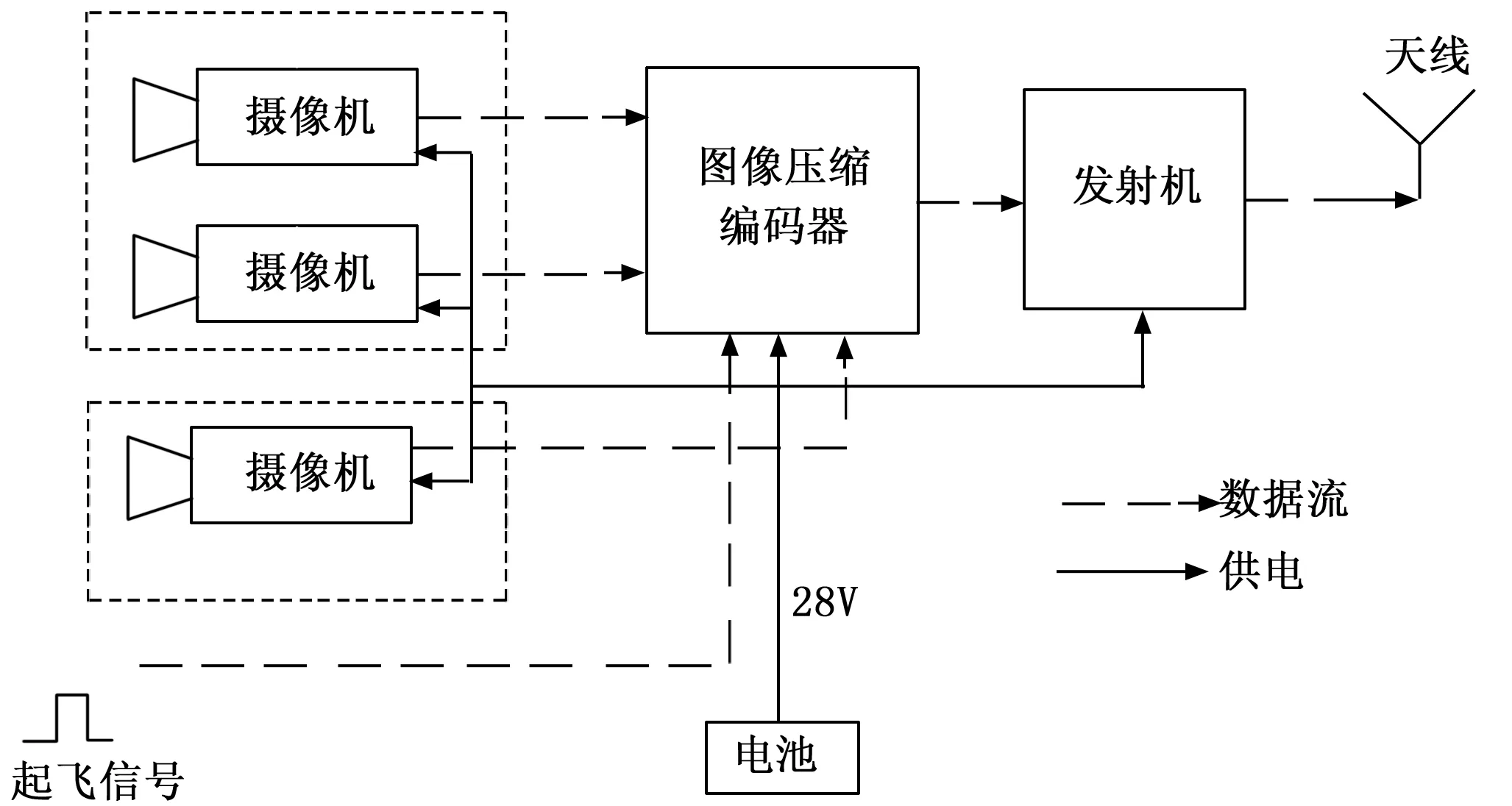
圖1 圖像測量系統原理框圖
2.1 攝像機
攝像機分為兩個模塊,包括光學部分和電學部分。攝像機可實現了圖像采集、數據輸出等功能,為了滿足系統對攝像裝置體積小及重量輕的要求,攝像機選用了集成度較高且焦面尺寸較小的感光元件作為sensor,sensor自身集成了復合視頻輸出接口,其與圖像編碼器之間只有供電線路及復合視頻接口。其原理框圖如圖2所示。
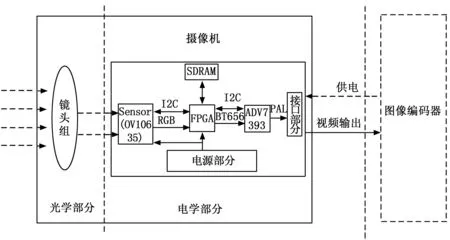
圖2 攝像機原理框圖
2.1.1 光學部分
光學系統共9片透鏡,第一片透鏡的通光口徑最大,為φ13.2 mm。從鏡頭第一面到最后一面的長度為42 mm,后工作距離為2 mm,總長(第一面中心到像面)為45 mm。單片透鏡平均透過率達到97.6%,光學系統的透過率為0.9769=80.3%。
光學系統采用了無熱設計,在-40~60 ℃溫度區間內全視場全波段范圍內畸變≤1.2%(全視場)。在-40~60 ℃范圍內,0.7歸一化視場與中心視場的相對照度20 ℃時為93.3%、-15 ℃時為93.2%、50 ℃時為93.4%,差別很小且一致性較好;定焦面0.2 m,0.7視場75 lp/mm時傳遞函數值均在0.45以上,全視場75 lp/mm時傳遞函數值均在0.35以上;定焦面0.4 m,0.7視場85 lp/mm時傳遞函數值均在0.5以上,全視場85 lp/mm時傳遞函數值均在0.38以上;定焦面1 m,0.7視場70 lp/mm時傳遞函數值均在0.5以上,全視場70 lp/mm時傳遞函數值均在0.28以上;定焦面10 m,0.7視場60 lp/mm時傳遞函數值均在0.5以上,全視場60 lp/mm時傳遞函數值均在0.38以上;定焦面50 m,0.7視場60 lp/mm時傳遞函數值均在0.5以上,全視場60 lp/mm時傳遞函數值均在0.38以上。攝像機攝像距離最短可到0.2 m,最遠不小于50 m。線對數85 lp/mm,0.7視場傳遞函數可達到≥0.4、全視場傳遞函數≥0.3。
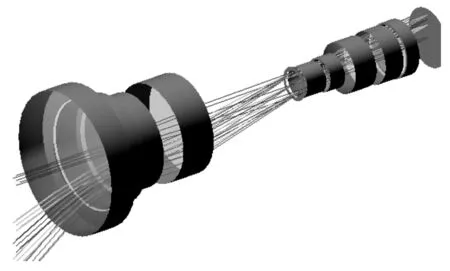
圖3 光學部分布局圖
2.1.2 電學部分
攝像機采用光學、電子學系統、結構一體化的設計形式,使用Omnivision公司OV10635的CMOS傳感器作為感光元件,該傳感器是將圖像預處理功能集成于一片SOC上的集成電路。攝像機電學部分由一塊印制板構成,主要包含一個CMOS sensor、一片視頻運放、晶振、一片FPGA、一片ADV7393及兩個LDO等器件組成,它完成傳感器的圖像成像及輸出、驅動的功能。CMOS sensor在通過FPGA控制配置相應寄存器的控制下完成圖像數據采集、預處理等功能,并輸出RGB格式的信號,FPGA再將此RGB格式的信號轉換成BT656/SDI格式的圖像數據,最終由ADV7393/GV7600輸出標準PAL-D制式的圖像數據。兩個LDO則用于將輸入的+5 V供電轉換為器件工作所需的+3.3 V和+1.5 V工作電壓,通過一個一體化接插件實現對外的輸入輸出接口。攝像機的電原理框圖如圖4所示。
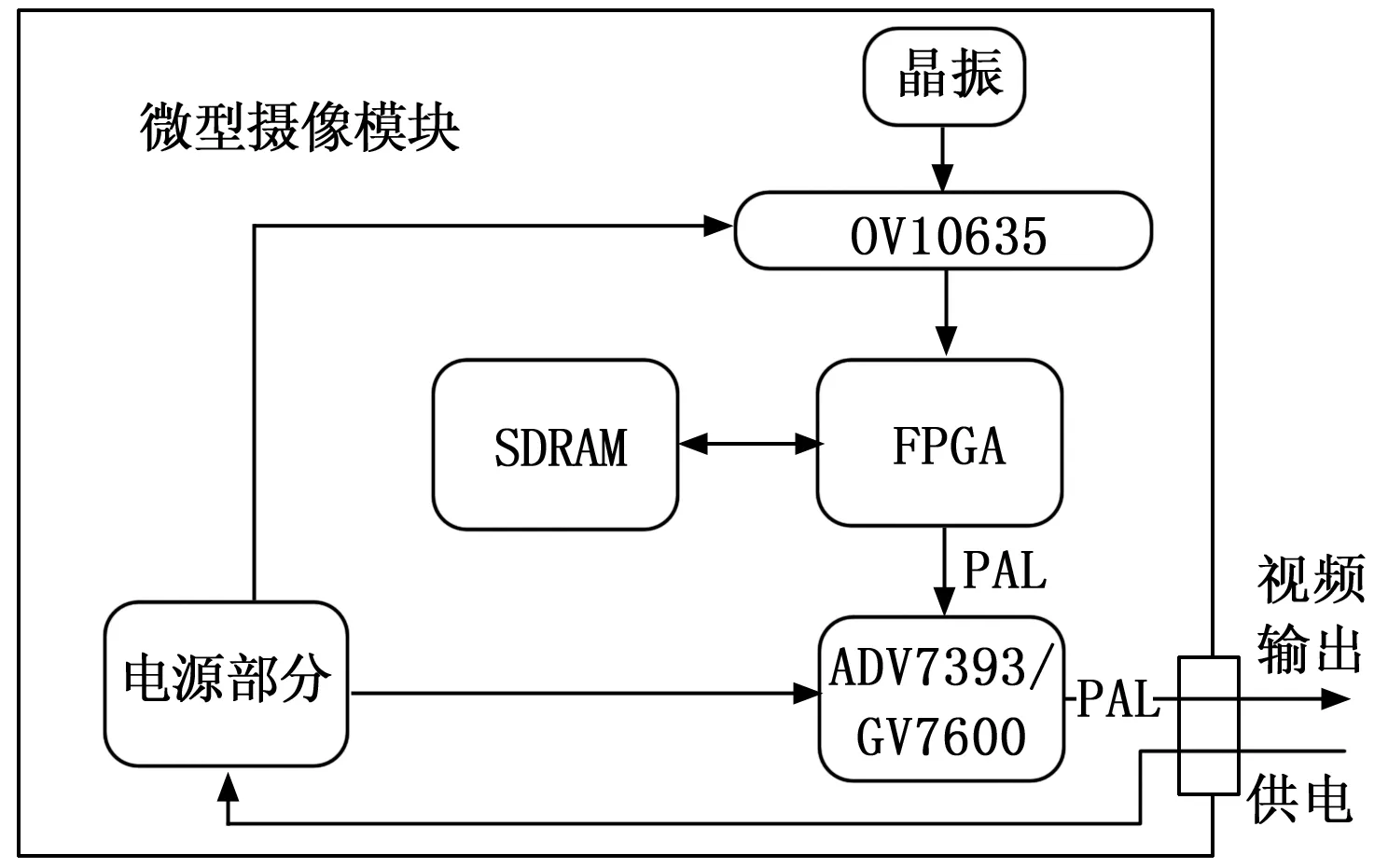
圖4 攝像機電原理框圖
CMOS sensor選擇OminiVision公司的OV10635芯片,這是一款像元尺寸6 um,像元數1 280×720的CMOS圖像傳感器作為光電轉換芯片。該CMOS圖像傳感器將圖像的成像、預處理、3A控制等功能整合在一個片上系統中,這樣可以極大地減小單機尺寸、功耗及sensor外圍信號處理電路設計的復雜度;并且該芯片動態范圍寬、靈敏度高、工作方式靈活,可直接輸出PAL制復合視頻信號。該芯片集成了CMOS sensor、微處理器,用于實現自動曝光、自動增益控制、自動白平衡等算法,具備圖像自動修正、降噪和增強功能。快門類型為電子卷簾快門,數據輸出采用SCCB(兼容I2C總線)串行總線接口,通過改變CMOS傳感器內部寄存器的設定值可以對傳感器的電子增益、像素積分時間、傳感器曝光時間、輸出圖像大小、輸出圖像位置和圖像輸出幀率分別進行控制。
2.2 圖像壓縮編碼器
圖像壓縮編碼器接收攝像機輸出的標清PAL制或高清SDI視頻信號,對該信號進行AD轉換后以一定格式的數字信號輸出, DSP完成圖像數據的編碼及輸出, FPGA完成RS編碼和圖像數據組幀,由此實現動態視頻的糾錯壓縮編碼功能。圖像壓縮編碼器原理框圖如圖5所示。

圖5 圖像壓縮編碼器原理框圖
2.2.1 信號處理硬件
圖像壓縮編碼器主要完成復合視頻選通及A/D變換、動態視頻的H.264編碼、RS編碼、數據組幀等功能。其數據流圖如圖6所示。
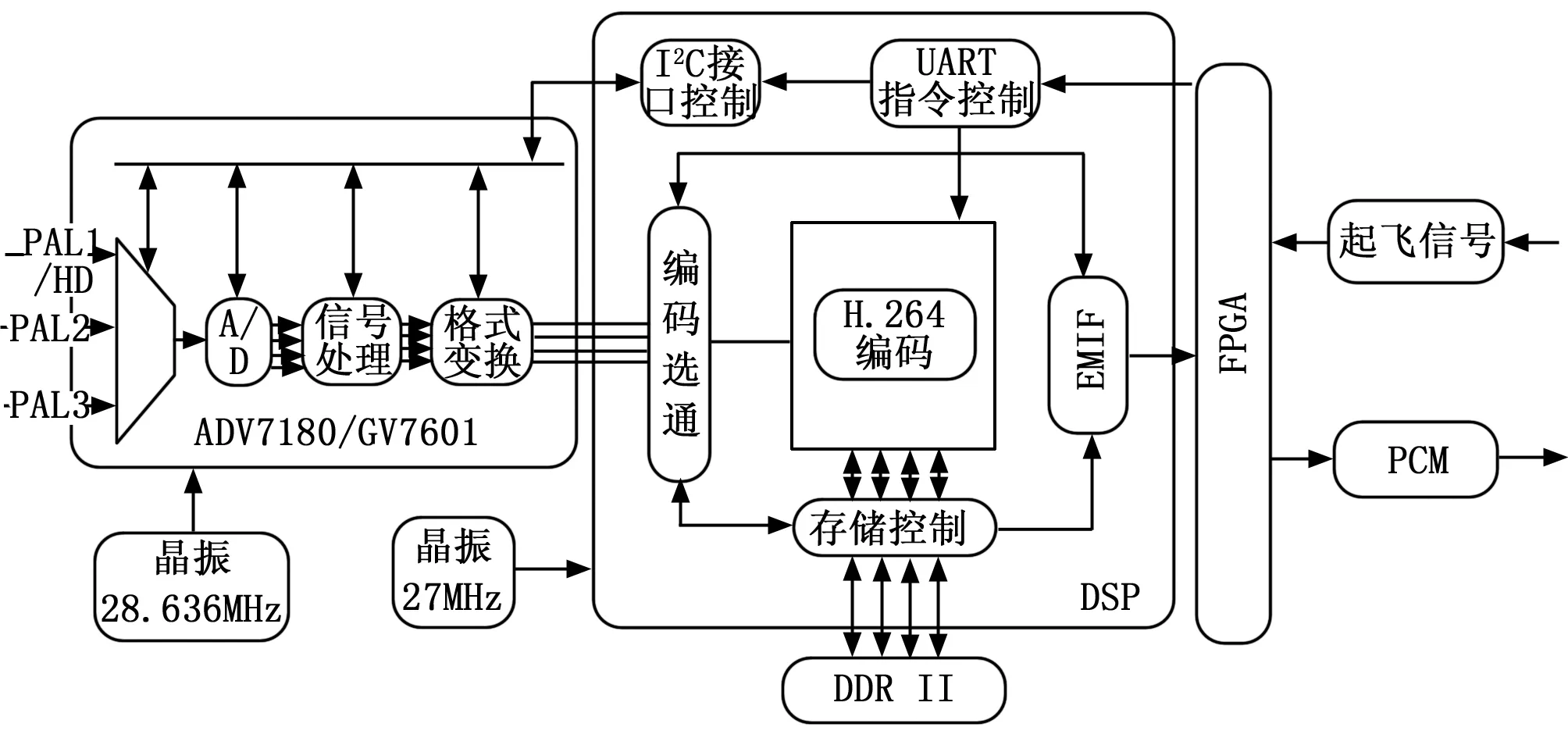
圖6 圖像壓縮編碼器數據流圖
圖像壓縮編碼器接收攝像機輸出的復合視頻模擬信號,在進入DSP編碼前需要對該模擬信號進行A/D轉換。同時轉換后的數字信號必須是H.264壓縮編碼所規定數字視頻碼流,所以對于A/D后的數據還需要進行相應數字視頻幀格式化處理。
復合視頻A/D轉換及數字視頻幀格式處理選用ADV7180芯片實現。對于外部輸入的模擬視頻,可以自動識別NTSC制式、PAL制式,并將此標準的模擬基帶視頻信號轉換成符合ITU-R BT656接口標準的4:2:2的分量視頻數字信號。主要由前端數據選通和A/D轉換部分、數據處理部分及數據輸出部分組成,DSP通過I2C接口實現對ADV7180的寄存器控制。模擬信號通過濾波器后進行選通,將選通后的模擬視頻信號送入ADC,再由ADC將模擬視頻信號轉換成數字信號;該數字信號進入信號處理部分,自動進行色調、色飽和度和亮度調整并進行亮色分離;最后通過數據輸出部分將經過處理的數字信號進行相應的格式變換,產生符合BT.656格式的視頻數據。通過緩沖區后在P7-P0口進行輸出。
圖像數據編碼由DSP完成,選用TI公司C6000系列的DSP6467。該DSP可以完成對ADV7180的寄存器訪問控制、圖像數據編碼及數據輸出等一系列功能。帶有視頻處理子系統Video Processing Subsystem(VPSS),包括兩路用于視頻采集的VPIF輸入。圖像數據編碼采用H.264編碼算法,H.264具有比以前各種標準更好的壓縮效率,可使傳輸帶寬降低到原來的1/4。H.264編碼在幀內預測編碼、幀間預測編碼、隔行編碼、變換編碼、去塊效應濾波、系數掃描方式、熵編碼、差錯恢復工具等方面都進行極大改進,有效提高編碼效率。H.264支持YUV 4:2:0格式、YUV 4:2:2格式的數據輸入。設計中采用YUV 4:2:2格式圖像輸入格式。
DSP實現動態圖像壓縮功能,通過調用FPGA內的各子模塊完成與外部信號的接口連接,讀取壓縮圖像數據,進行RS編碼,完成圖像數據組幀的功能,輸出PCM流到發射機。
2.2.2 軟件設計
軟件結構圖如圖7~8所示。
圖像壓縮編碼器中DSP軟件主要完成視頻AD轉換芯片ADV7180送出的BT656格式的視頻輸出,調用H.264視頻編碼庫完成視頻壓縮編碼,完成后送FPGA。另外接收遙控指令,進行動態壓縮編碼切換。主要包括復合視頻AD轉換模塊、初始化控制程序模塊、視頻編碼模塊。
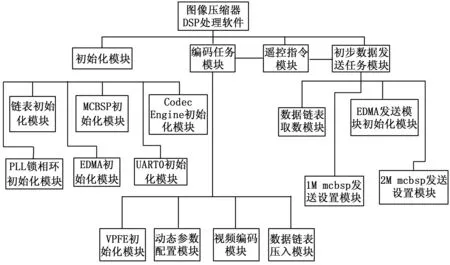
圖7 圖像壓縮編碼器DSP軟件結構圖
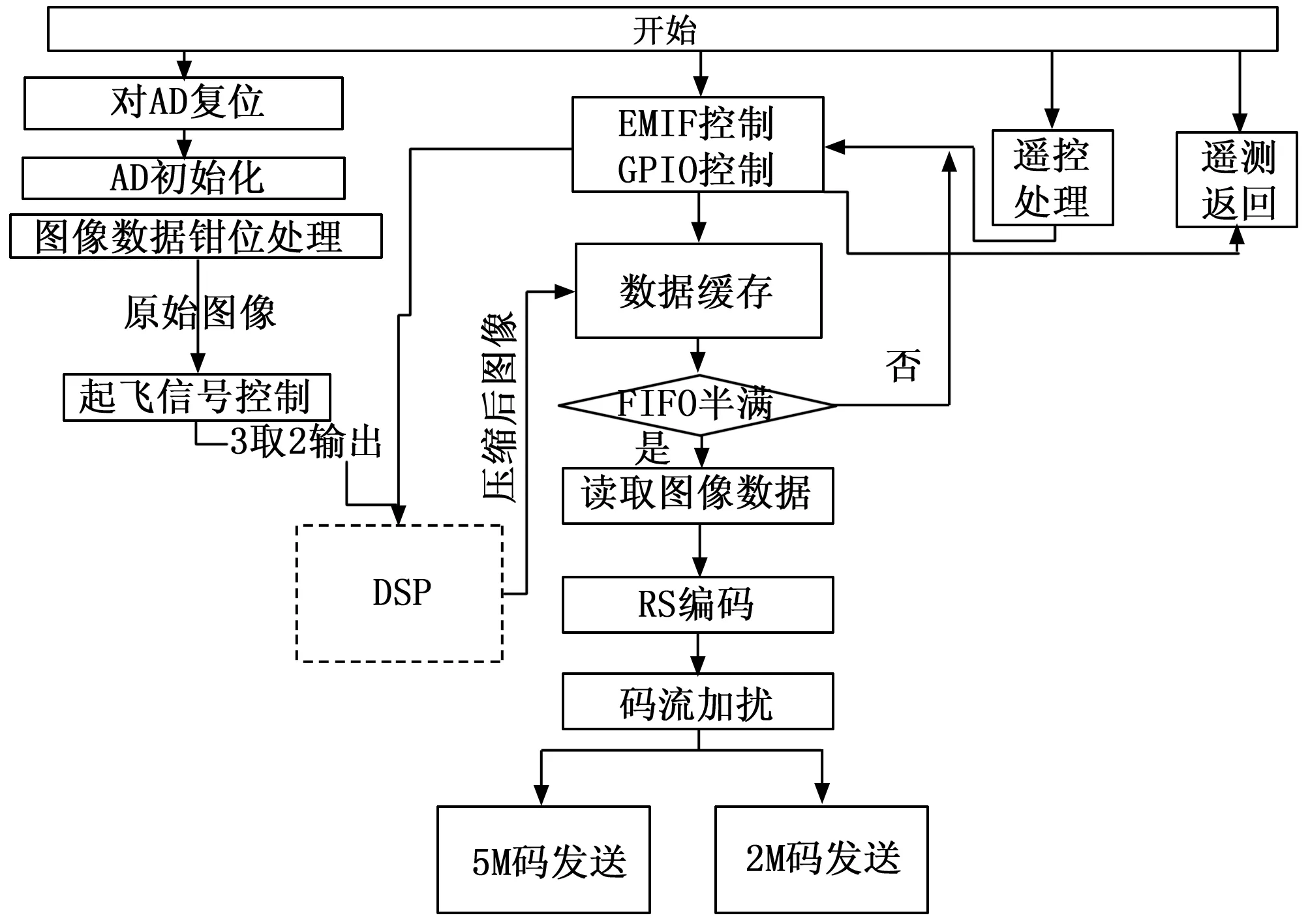
圖8 圖像壓縮編碼器FPGA軟件流程圖
圖像壓縮編碼器FPGA軟件主要完成整個系統與外部信號的接口控制、RS編碼、數據編幀。FPGA作為系統的協處理器,對DSP和其他器件進行復位,對DSP程序進行控制,按照傳輸協議對DSP編碼數據進行采集,按照中心程序單元時鐘要求對圖像編碼數據進行傳輸。
3 試驗結果與分析
圖像測量系統參加運載火箭總裝總測廠房某型號Y47火箭全箭集成綜合試驗以驗證系統的有效性。集成綜合試驗是運載火箭出廠前箭上和地面各個電氣系統的一次大型匹配試驗。地面采用一體化測發控系統進行測試,箭上參試系統包括控制、推進劑利用、遙測(含圖像測量系統)、外測安全和動力(姿控發動機)系統。圖像測量系統參加此試驗,可驗證圖像測量系統與遙測系統等箭上產品之間工作的正確性、協調性和匹配性;驗證圖像測量系統箭上設備工作的正確性、協調性和匹配性;驗證圖像地面解碼設備軟解及硬解解調畫面的正確性和有效性;檢查圖像測量系統與其他系統的同時工作的干擾情況。
圖像系統箭上設備:攝像機、圖像壓縮編碼器、發射機、天線及設備間的連接電纜,按照箭上設備安裝要求安裝到箭體各個艙段。圖像地面測試設備:接收天線、低噪聲功率放大器、天線驅動機構、接收機、遙測解碼計算機、以太網交換機、圖像地面解碼設備、視頻顯示器,固定擺放在廠房設備測試間。圖像測量系統的加電時間、順序依據電氣系統總測試流程進行,按照控制系統、推進劑利用系統、外側安全系統、遙測系統(含圖像測量系統)依次加電,進行模擬發射程序驗證。圖像測量系統加電后,地面接收天線接收箭上射頻設備下傳的無線信號,經饋源、低噪聲功率放大器、功分器、自動增益控制、接收機、視頻綜合處理單元、遙測地面處理軟件,將圖像全幀數據挑好后通過以太網交換機以UDP方式傳送給圖像地面解碼設備。圖像地面解碼設備有兩種解碼方式,分別為軟件解碼和硬件解碼。圖像地面解碼設備接收到遙測地面處理軟件轉發的全幀數據,一部分送到硬件解調卡,解調出2路PAL制式信號,傳送到支持PAL-D格式的標清顯示器實時顯示采集圖像,未啟動前顯示標準彩條自檢信號;一部分通過軟件進行解碼,利用H.264圖像壓縮編碼算法以及RS交錯碼原理進行解調處理,實時顯示采集畫面。
圖9顯示解碼畫面為未進行RS編碼的測試畫面,左邊為硬件解碼顯示器顯示畫面、右邊為軟件解碼顯示畫面。整個試驗期間,硬件解碼畫面多次出現花屏、軟件解碼畫面多次出現馬賽克、卡頓現象,監測圖像點頻數據無線信號頻譜特性,信號增益較差,調整天線方位無改善,查看源碼數據,幀同步錯位較多,導致圖像壓縮編碼算法幀內預測和幀間預測出現錯誤疊加,出現解調畫面問題。總裝總 測廠房里停放箭體較多、工裝設備較多,容易產生信號多 徑效應,造成圖像無線信號弱、信道增益不強、容錯性差。 圖像壓縮編碼器增加RS編碼算法模塊,地面解碼設備增加 RS解碼模塊,通過集成綜合試驗項目其余項目測試,全程 解調畫面清晰、流暢,無此類現象出現。RS編碼后的飛行 試驗解調的畫面如圖10所示,全程畫面清晰、流暢,關鍵 過程動作信息均能清晰捕捉到位、試驗關注場景均能有效 呈現。試驗結果表明RS編碼能有效降低信道誤碼,提高改 善圖像解調畫面質量。
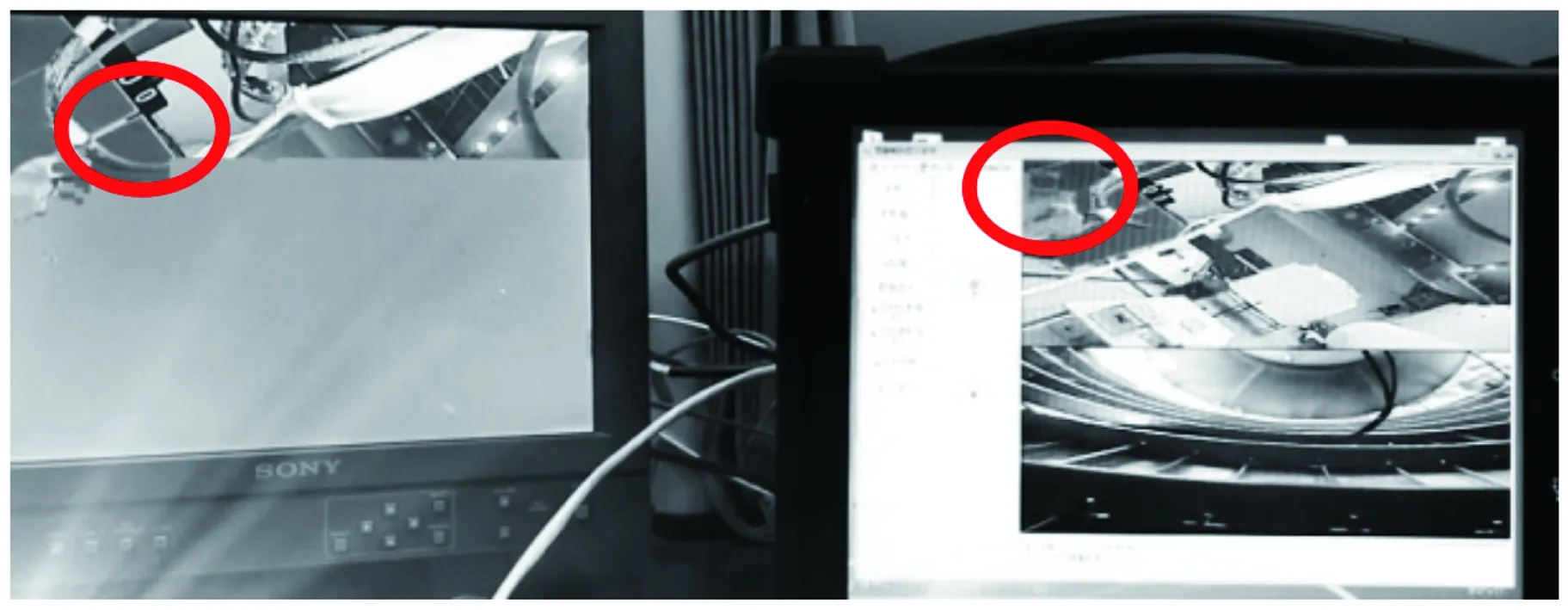
圖9 無RS編碼的集成綜合試驗測試圖面
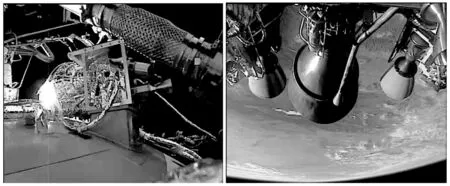
圖10 RS編碼后的飛行試驗畫面
4 結束語
為了改善某運載火箭集成綜合試驗圖像測試畫面出現馬賽克、花屏、卡頓的現象,給出了一種基于RS碼為糾錯碼的圖像測量系統設計方案。火箭飛行試驗結果表明,RS編碼后,能有效降低信道誤碼、提高信道增益,提升無線信道傳輸質量,為某型號運載火箭圖像測量手段成功應用提供了解決方法。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
家庭影院技術(2017年9期)2017-09-26 03:41:45