欠驅動多軸機械節能控制系統誤差時域分析
2018-11-28 09:07:10,,
計算機測量與控制 2018年11期
, ,
(上海米度測控科技有限公司,上海 201203)
0 引言
欠驅動多軸機械系統是一種驅動裝置數量少于自由裝置的機械系統,使用少量驅動就可完成自由動作,并達到預設目的。由于科學技術不斷進步,人們對于機械性能要求也越來越高,低耗、高速、智能化成為了機械節能控制系統必不可少優勢。機械控制系統由于減少了驅動裝置,可使多軸機械剛度增強,具有質量輕、功耗低特點,可滿足節能控制需求。因此,欠驅動多軸機械節能控制系統得到了廣泛應用,可以用作水下機器人、空間機器人、移動機器人等多種高端機械產品的主要控制系統[1]。如果系統出現故障,多軸次主動關節數量小于自由度,那么系統多軸次要關節數量將大于主動關節數量,此時該系統具有冗余性和靈活性,但卻增加了系統自身重量,同時也消耗了大量能源,此時利用欠驅動多軸機械節能控制方式可有效解決這一問題。由于對系統進行控制時會存在誤差,采用傳統方式進行分析時,沒有考慮到地域和空間環境對結果造成的影響,導致分析精準度低,為此,提出了時域分析法對欠驅動多軸機械節能系統控制誤差展開研究。
1 節能控制系統誤差時域分析
欠驅動多軸機械系統具有能量低、造價少、質量輕、靈活性強的優勢,能夠廣泛應用于驅動機械系統之中。該系統具有獨立控制性能,其控制變量數量小于系統自由度數量,是一種線性控制系統[2]。由于欠驅動部分約束方程式不可積的,具有二階完整約束性能,可通過減少控制元件數量來降低系統整體質量。為了分析欠驅動多軸機械節能系統控制誤差,需從系統控制時域響應角度出發,研究控制系統在動態響應和靜態響應兩方面的性能指標,以此為基礎對系統控制誤差展開分析。
1.1 控制系統時域響應
在任何一個穩定欠驅動多軸機械節能控制系統中,輸入信號時間響應都是由靜態響應和動態響應組成的,其中靜態響應真實反映了系統在靜態狀態下的控制精準度,而動態響應又分為瞬態動態和暫態動態,該部分描述了控制系統的整體動態性能[3]。無論是靜態還是動態響應,系統具有線性控制性能,為此,針對控制系統誤差分析,需從時域靜態響應和動態響應兩方面出發。
1)靜態響應:
系統在穩定運行狀態下,從任何初始條件開始響應,經過一段時間之后整個系統就完成了過渡響應過程,之后便進入到了由外力作用下的穩定狀態,該部分響應即為靜態響應,因此,在該狀態下的響應為趨近于無窮大系統輸出狀態[4]。系統在穩定狀態下的輸出量在最終會復原成輸入量,為系統穩定狀態下誤差信息,以此為基礎,對穩態性能展開研究。
2)動態響應:
動態響應是在輸入信號影響下,系統從初始狀態到最終狀態的整體響應過程,依據系統結構參數,需將系統動態響應分成衰減、發散或振幅動蕩這3種形式[5]。在實際運行環境中,控制系統動態響應是隨著系統運行而逐漸降低的,該過程又被稱為過渡過程。經過動態響應衰減過程中所有數據的獲取,必須是在系統穩定運行狀態下得到的,該響應部分除了固定數據之外,還需提供系統穩定速度、瞬時速度以及摩擦情況等動態信息,通過這些信息來描述控制系統動態性能[6]。
綜上所述,欠驅動多軸機械系統節能控制誤差是由靜態響應和動態響應兩部分組成的,而輸入信號作用下的控制性能是由靜態性能和動態性能兩部分組成的。將控制性能作為指標,分別采用時域靜態響應和動態響應對系統節能控制誤差展開分析。
1.2 基于時域響應的誤差分析
基于時域響應的誤差分析采用性能指標作為衡量標準,利用動態狀態下和穩定狀態下的輸出量作為期望值,將實際值與期望值進行對比,所產生的誤差,即為動態誤差或靜態誤差[7]。如果誤差為常數,即為靜態誤差;如果誤差是一種度量,即為動態誤差。
1.2.1 靜態誤差
針對欠驅動多軸機械節能控制系統誤差分析,除了滿足動態響應信號之外,還需滿足靜態響應,對于不能在穩定狀態下運行的系統可不采取該狀態下的任何靜態指標信息。無論是簡單環境下,還是復雜環境下,系統是在穩定狀態下滿足靜態性能需求的,那么可將該靜態性能作為誤差分析標準[8]。因此,為了研究方便,需設置初始條件,使系統在輸入信號之前,輸出量為0。
通常情況下,靜態誤差主要產生來源包括系統結構不同、輸入信號不穩定、外界干擾以及零件變形等因素,這些因素導致系統在靜態狀態下出現誤差。靜態響應流程如圖1所示。

圖1 靜態響應流程
靜態誤差具體計算內容如下所示。
設E1為系統希望輸出值,E2為系統實際輸出值,那么系統輸出所產生的誤差為:
E系=E1-E2
(1)
如果系統是在穩定狀態下運行的,那么輸出誤差E的穩定值又被稱為靜態誤差,具體計算如下所示:
E靜=limE系=lim(E1-E2)
(2)
從公式(1)、(2)中看出,欠驅動多軸機械節能控制系統在穩定狀態產生的靜態誤差與結構參數有關,也與外部輸入信號有關。對于系統給定輸入信號作用下所產生的靜態誤差,需進行計算。設輸入函數為:
(3)
其中:e為常數;m為輸入單位數值。
根據上述公式(2)可得:

(4)
①對于輸入為0的節能控制系統,靜態誤差是一個常數。從空間環境角度分析,由于系統沒有積分環節,所以輸出值是恒定的,此時必然會存在一個恒定誤差,否則系統將會0輸出;
②對于輸入為1的節能控制系統,靜態誤差位0。從空間角度分析,該狀態下的系統是具有一個積分環節的,當系統處于穩定狀態下時,僅僅在比例環節具有穩態結構。如果靜態下的系統有誤差,那么系統開始積分,此時的輸出值不斷增加,誤差逐漸減小;如果靜態下的系統輸出值為0,那么誤差也為0,系統將不會積分,始終維持為原積分,此時靜態誤差為0。
根據靜態誤差分析表明,系統是否產生靜態誤差取決于輸入信號為0還是為1,不同信號輸入結果,靜態誤差也將不同。
1.2.2 動態誤差
節能控制系統除了滿足控制信號響應需求之外,還需滿足一些動態性能,對于不能穩定運行的系統沒有實用價值,因此也不需要對該狀態下的動態性能指標進行采集。通常情況下,采用階段性輸入方式可作為動態性能指標,也是最復雜的動態工作環境。如果系統是在階段性函數作用下滿足動態性能需求,那么該系統在其它函數作用下產生的動態性能也可作為誤差分析標準。因此,為了研究方便,需采用典型輸入信號形式作為單位階段性函數,并設置初始條件,使系統在輸入信號之前,設置輸出量為0[9]。
描述系統在單位動態函數影響下,整個過度過程是隨著時間變化而發生改變的,因此,可將該過程作為動態性能指標。線性控制系統無論是在零初始輸入條件和單位動態信號輸入狀態都可作為動態誤差研究指標,系統除了給定的動態輸入信號之外,還受到地域環境干擾因素影響,導致電源電壓出現波動、機械負載力變差等問題,因此,需采用時域方法對動態誤差進行分析。動態響應過程如圖2所示。
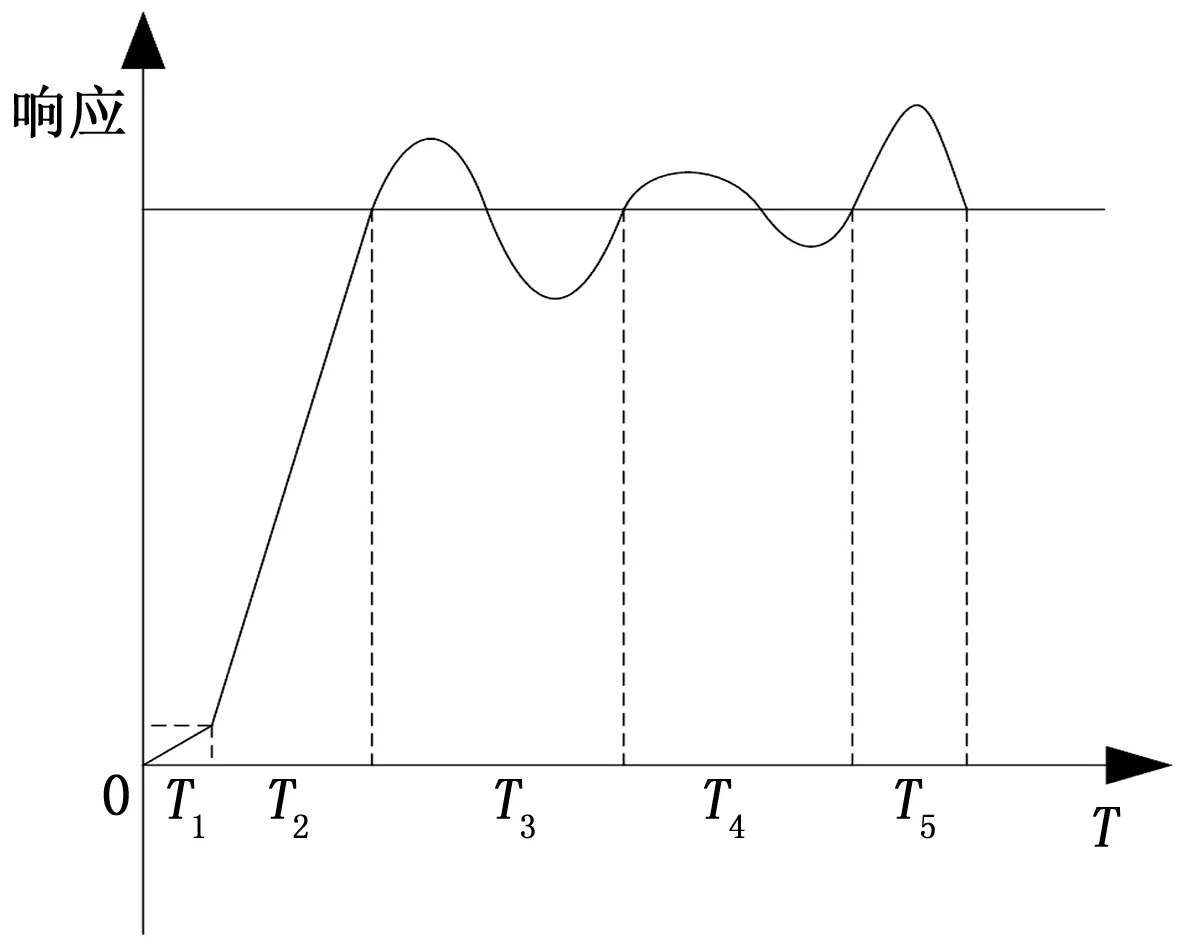
圖2 動態響應過程
由圖2可知:該響應過程分為5部分,分別是延遲時間T1、上升時間T2、峰值時間T3、調節時間T4和超調量T5。其中延遲時間指的是動態響應曲線第一次達到穩定狀態所耗費的時間;上升時間指的是動態響應曲線第一次從穩定狀態過渡到峰值狀態所耗費的時間;峰值時間指的是動態響應曲線第一次達到峰值狀態所耗費的時間;調節時間指的是動態響應曲線偏離穩定狀態并自行調節所耗費的時間;超調量指的是動態響應曲線第一次越過峰值下的幅度與穩態值之比。
按照上述5個階段的動態響應過程,對系統輸出所產生的誤差進行計算:
2型糖尿病患者的主要死亡原因為大血管病變,而非酒精性脂肪性肝病(non-alcoholic fatty liver disease,NAFLD)可以預測心腦血管疾病的發生[1],提示2型糖尿病合并NAFLD患者患心腦血管風險更高。在2型糖尿病患者中,有約2/3的人合并NAFLD,NAFLD患病率是一般人群的5~9倍[2-3]。然而,有關2型糖尿病患者發生NAFLD危險因素的研究較少。
E系′=ET1-ET2-ET3-ET4-ET5
(5)
如果系統是在動態狀態下運行的,那么受到地域環境影響輸出的誤差E系′又被稱為動態誤差,具體計算如下所示:
E動′=limE系′lim(ET1-ET2-ET3-ET4-ET5)
(6)
從公式(6)、(7)中看出,欠驅動多軸機械節能控制系統在動態狀態下所產生的動態誤差,不但與驅動響應時間有關,還與作用點位置。通常利用上升時間或者峰值時間作為驅動響應速度指標;調節時間作為驅動響應速度和摩擦程度綜合性指標;超調量作為系統受到摩擦程度指標。
根據動態誤差分析表明,系統是否產生動態誤差取決于動態響應過渡過程中的延遲時間、上升時間、峰值時間、調節時間和超調量。
2 實例分析
欠驅動多軸機械節能控制系統誤差時域分析為實例研究目標,選擇某公司生產的機器人作為實例研究對象,選擇該機器人在命令執行期間內的節能控制信息作為實例分析樣本,分別對系統控制誤差時域動態響應和靜態響應兩方面進行驗證分析。
2.1 靜態誤差實例分析
靜態誤差是期望輸出值與實際輸出值的差值,靜態誤差越小,說明系統控制精準度就越高,因此可將靜態誤差作為衡量系統性能好壞的標準。根據上述內容可知,系統是否產生靜態誤差取決于輸入信號,不同信號輸入結果,靜態誤差也將不同。依據該內容對控制誤差進行分析,可有效解決傳統方法存在空間環境影響,造成分析結果精準度低的問題。
為了驗證上述內容的真實性,將傳統方法與采用時域分析方法對欠驅動多軸機械節能系統誤差分析精準度進行對比,結果如圖3所示。
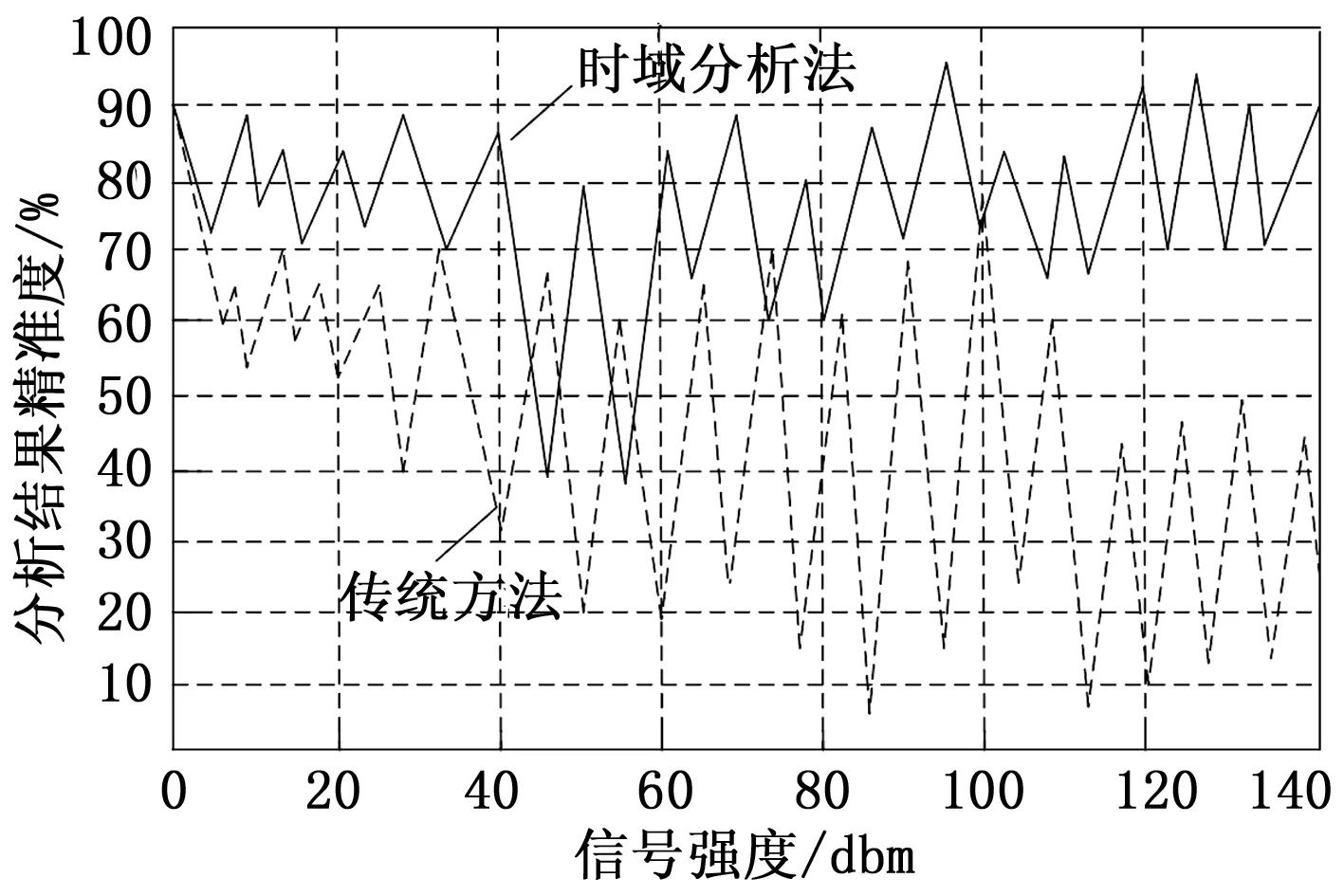
圖3 兩種方法靜態誤差分析精準度對比結果
從圖3中的折線走向趨勢可看出,兩種方法最初分析結果精準度可達到90%。當輸入信號強度為20 dbm 時,采用傳統方法的分析結果精準度可達到55%,而采用時域分析方法的分析結果精準度可達到85%;當輸入信號強度為40 dbm 時,采用傳統方法的分析結果精準度可達到33%,而采用時域分析方法的分析結果精準度可達到86%;當輸入信號強度為60 dbm 時,采用傳統方法的分析結果精準度可達到20%,而采用時域分析方法的分析結果精準度可達到80%;當輸入信號強度為80 dbm 時,采用傳統方法的分析結果精準度可達到35%,而采用時域分析方法的分析結果精準度可達到60%;當輸入信號強度為100 dbm 時,采用傳統方法的分析結果精準度可達到75%,而采用時域分析方法的分析結果精準度可達到75%;當輸入信號強度為120 dbm 時,采用傳統方法的分析結果精準度可達到10%,而采用時域分析方法的分析結果精準度可達到90%。
通過圖3中信號強度為40~60 dbm 期間,采用時域分析方法精準度大幅度下降,造成精準度下降的主要原因是系統過于閑置,使節能性能不能充分發揮。根據分析結果可知,傳統方法受到空間環境影響,無法在靜態響應過程中有效分析系統控制誤差,導致分析結果精準度較低。而采用時域方法能夠避免空間環境影響,保持較高的分析結果精準度。
2.2 動態誤差實例分析
動態誤差是以系統運行的時間變量為函數,提供系統比較穩定的控制變化規律。根據上述內容可知,系統是否產生動態誤差取決于動態響應過渡過程中的延遲時間、上升時間、峰值時間、調節時間和超調量。依據該內容對控制誤差進行分析,可有效解決傳統方法存在地域環境影響,造成分析結果精準度低的問題。
為了驗證上述內容的真實性,將傳統方法與采用時域分析方法對欠驅動多軸機械節能系統動態誤差曲線進行分析,結果如圖4所示。

圖4 兩種方法動態誤差曲線分析結果
圖4中的T1、T2、T3、T4、T5分別代表了延遲時間、上升時間、峰值時間、調節時間和超調量。其中在延遲時間段內的傳統分析方法與時域分析方法動態誤差大小一致;在上升時間段內的傳統分析方法與時域分析方法出現較小分歧;在峰值時間段內的傳統分析方法響應狀態分割線與實際分割線相比要小,此時已經偏離原始輸出值,接下來的調節時間和超調量與實際值相比,誤差較大。而采用時域分析方法的調節時間和超調量與實際值基本一致。
針對動態誤差曲線分析情況,將兩種方法的誤差分析精準度進行對比,結果如圖5所示。

圖5 兩種方法動態誤差分析精準度對比結果
從圖5中的折線走向趨勢可看出,兩種方法最初分析結果精準度可達到90%。當動態響應位于延遲時間段內時,傳統方法與時域方法的分析結果精準度一致,都為85%;當動態響應位于上升時間段內時,傳統方法動態響應受到地域環境影響,導致分析結果精準度降低,達到65%。而采用時域方法的分析結果,雖然不會受到地域環境影響,但是由于系統是在動態環境下控制的,分析結果精準度也會降低,可達到80%;當動態響應位于峰值時間段內時,傳統方法分析結果精準度達到55%,而采用時域方法的分析結果精準度達到70%;當動態響應位于調節時間段內時,傳統方法調節效果較差,導致分析結果精準度降到41%。而采用時域方法的分析結果精準度上升到75%;當動態響應位于超調量過程中時,傳統方法分析精準度已經達到了最低,為20%。而采用時域方法的分析結果精準度持續上升,達到了80%。根據分析結果可知,傳統方法受到地域環境影響,無法在動態響應過程中有效分析系統控制誤差,導致分析結果精準度較低。而采用時域方法能夠避免地域環境影響,保持較高的分析結果精準度。
2.3 結論
采用時域方法對欠驅動多軸機械節能系統控制誤差進行分析,使動態響應過渡過程中的延遲時間、上升時間、峰值時間、調節時間和超調量對動態誤差影響得到了有效驗證,也使輸入信號對靜態誤差影響也得到了有效驗證。為此,采用時域分析方法能夠改善傳統系統受到地域或空間環境的影響,大大提高分析結果精準度。
3 結束語
采用時域分析方法對欠驅動多軸機械節能系統控制誤差進行分析,可深入研究動態響應和靜態響應下的動態誤差和靜態誤差,不僅從理論層面上分析系統控制誤差,也可從案例分析中獲取控制誤差分析結果精準度,由此可說明時域分析方法的真實性。
使用時域分析方法具有以下創新點:
1)從地域角度分析系統誤差,通過動態響應特點繪制動態響應過程曲線,詳細研究延遲時間、上升時間、峰值時間、調節時間和超調量對動態誤差影響。
2)從空間角度分析系統誤差,通過靜態響應特點構建靜態響應流程圖,詳細研究輸入信號對靜態誤差影響。
欠驅動多軸機械節能系統控制誤差的分析融合了機械、信號傳輸、控制等多個學科的知識,能夠為高科技發展提供有力支持。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
電子制作(2018年18期)2018-11-14 01:48:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
山東工業技術(2016年15期)2016-12-01 05:31:22
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44