中遠程艦空導彈協同制導飛行試驗安控方案設計
2018-11-28 09:07:24,
計算機測量與控制 2018年11期
,
(中國人民解放軍92941部隊,遼寧 葫蘆島 125001)
0 引言
隨著武器裝備技術與戰術的發展,防區外空襲已占主導,為了提高編隊對空中威脅目標防御作戰的主動性,提出了新型中遠程艦空導彈武器系統能夠實現超視距作戰的要求,即利用多種平臺完成視距外目標的信息獲取,進而完成導彈發射,同時還能夠實現中遠程艦空導彈的多平臺協同制導[1]。在中遠程艦空導彈飛行試驗中,安全性是首要考慮的問題,通常根據中遠程艦空導彈制導控制特點,采取安控策略對中遠程艦空導彈進行安全控制。中遠程艦空導彈協同制導飛行試驗涉及多個導彈制導平臺,中遠程艦空導彈安全控制問題較為復雜,如何立足中遠程艦空導彈協同制導作戰過程,對中遠程艦空導彈安控方案進行設計,是開展中遠程艦空導彈協同制導飛行試驗亟待解決的問題。
1 艦空導彈協同制導作戰過程
為了提高艦艇編隊的反導縱深,充分發揮中遠程艦空導彈的射程優勢,面臨的主要問題是協同制導作戰模式下對目標的探測跟蹤和導彈的制導。所謂協同制導,是指導彈在飛行過程中,為克服雷達視距限制,制導信息通過不同的制導站接力發送給導彈,從而實現對目標的超視距攔截,擴大艦空導彈武器系統的作戰空域。在多個艦艇平臺協同制導作戰過程中,由于整個戰場信息是共享的,每艘艦艇平臺都知道其他艦艇的位置及制導能力[2]。
艦空導彈協同制導作戰平臺按照任務劃分可以分為協同探測平臺、導彈發射平臺和協同制導平臺。首先,由協同探測平臺上的對空傳感器對目標進行探測及精確跟蹤,穩定跟蹤后,通過數據鏈將目標精確跟蹤數據傳送給導彈發射平臺,導彈發射平臺的武器控制系統根據目標精確數據實時完成攔截可行性判斷、射擊諸元解算、導彈裝訂參數計算、發射控制等。導彈發射后,進入初制導階段,艦空導彈在指定空域達到預定姿態后轉入中制導階段,導彈發射平臺實時對本平臺制導情況進行監視,判斷導彈是否需要其它艦艇平臺進行協同制導,如果確定需要,則向協同制導平臺發出制導交班請求,協同制導平臺根據導彈發射平臺提供的導彈引導信息對導彈進行截獲,并實現對導彈的穩定跟蹤,至此完成導彈制導交接,由協同制導平臺上的制導雷達接力對導彈進行中制導。當彈目相對距離達到規定值時,導彈轉入末制導控制,引導導彈飛向目標,當彈目接近到適當時機,引信開機,適時引爆戰斗部殺傷目標[3-5]。協同制導作戰過程如圖1所示。
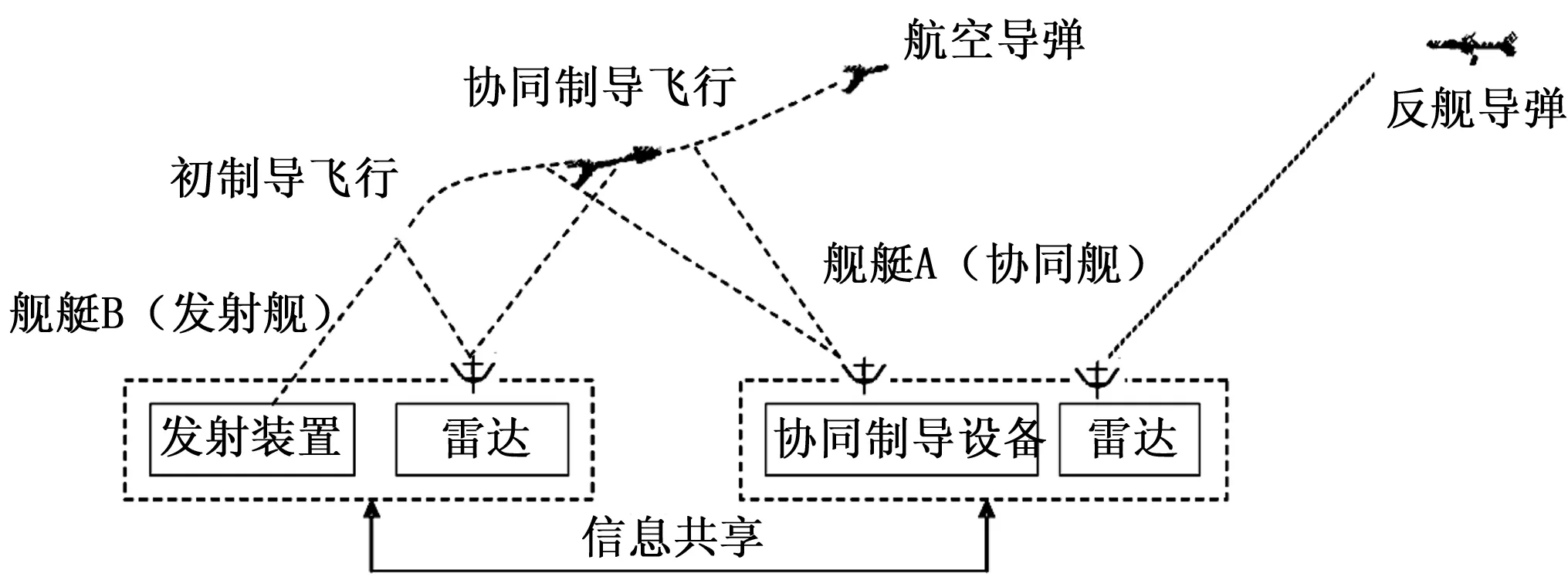
圖1 協同制導作戰過程
2 中遠程艦空導彈安全控制措施
中遠程艦空導彈安全控制措施包括艦面被動安控和彈上自主安控[6]。
1)艦面被動安控。
艦面被動安控是由放置在艦面的安控計算機對導彈殘骸落點進行實時預測,當導彈飛行軌跡異常時,由指令發送系統向彈上發送自毀指令。具體工作流程如下:
試驗前設置安全管道,導彈發射后,安控計算機實時接收導彈探測系統提供的導彈位置、速度參數,并實時進行導彈安控判斷。當導彈在安全管道內飛行時認為導彈飛行正常,當飛離安全管道后,安控計算機實時計算并顯示導彈此刻自毀時殘骸落點的散布位置,當判斷導彈殘骸落點飛離安全試驗航區并影響被保護目標安全時,由武控系統操作人員按下自毀按鈕,由指令發送系統向彈上發送自毀指令。導彈在接收到自毀指令后,將引爆命令通過引信傳遞到戰斗部,戰斗部即刻啟爆,啟爆后形成的殘骸將落入設定的安全試驗航區之內。射向坐標系下的導彈安全試驗航區及安全管道示意圖如圖2所示。
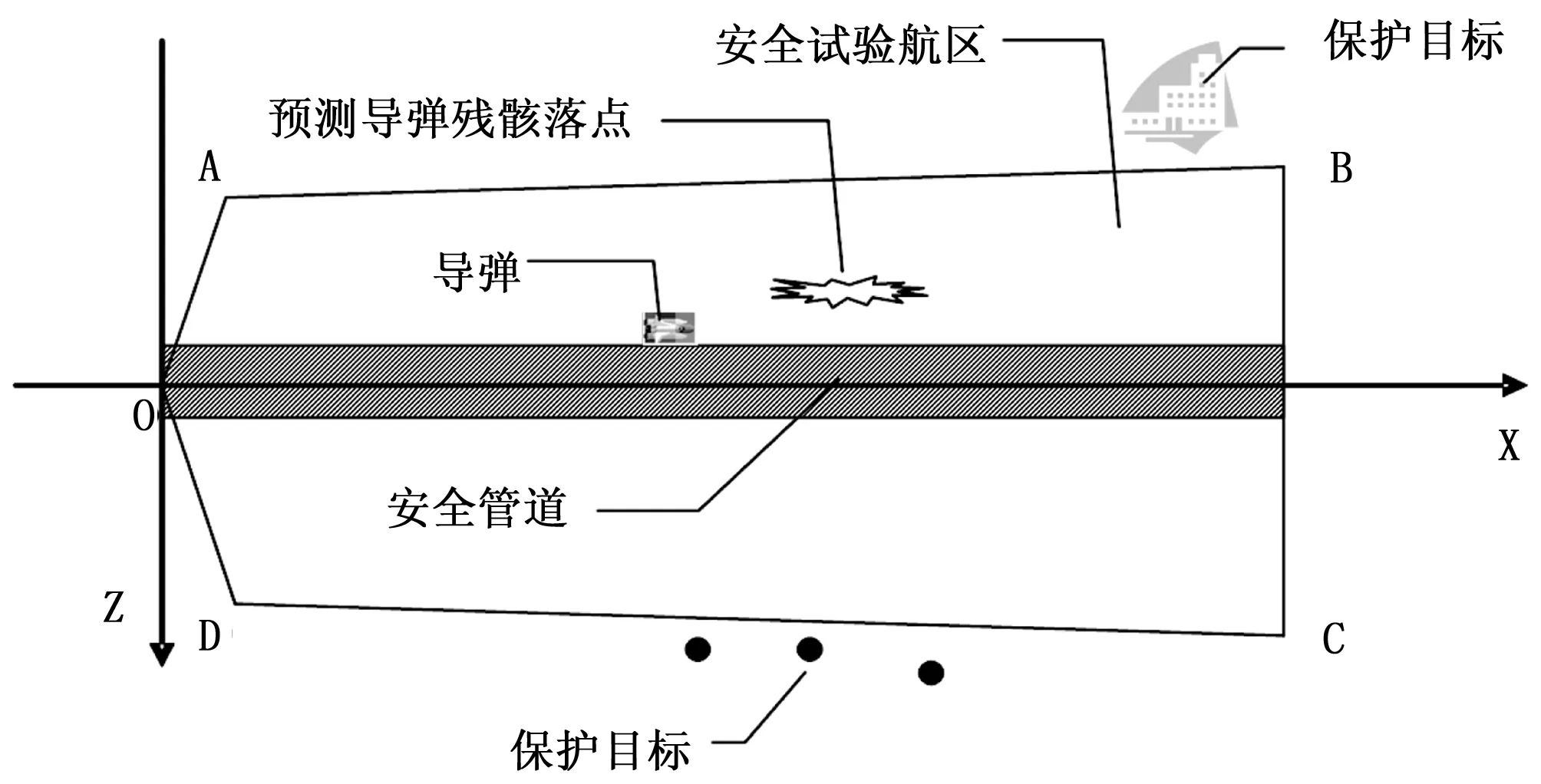
圖2 試驗航區及安全管道示意圖
2)彈上自主安控。
彈上自主安控主要是在導彈出現后向飛行和飛過理論遭遇點兩種情況下實施,因此,彈上自主安控在整個安控實施中只起輔助作用。彈上自主安控可根據導彈工作特點設置不同的安控判斷依據,例如可將彈目相對速度改變符號作為判別條件,再由彈上計算機判別是否對導彈實施自毀,條件滿足后3~5 s發自毀指令。
3 安控基本方案
在中遠程艦空導彈協同制導飛行試驗中,需要由兩個以上艦艇平臺參與對導彈的制導工作,每個艦艇平臺上的安控系統必須進行信息交互,確保導彈飛行的全程可監控。考慮到彈上自主安控與導彈是否協同制導飛行無關,因此,主要針對中遠程艦空導彈被動安控基本方案進行設計。
3.1 被動安控系統組成
被動安控系統主要由導彈外彈道信息采集系統、指令發送系統、武控系統、發射艦安控計算機、協同制導艦安控計算機、彈上相關設備、以及相應的通信鏈路組成,如圖3所示。
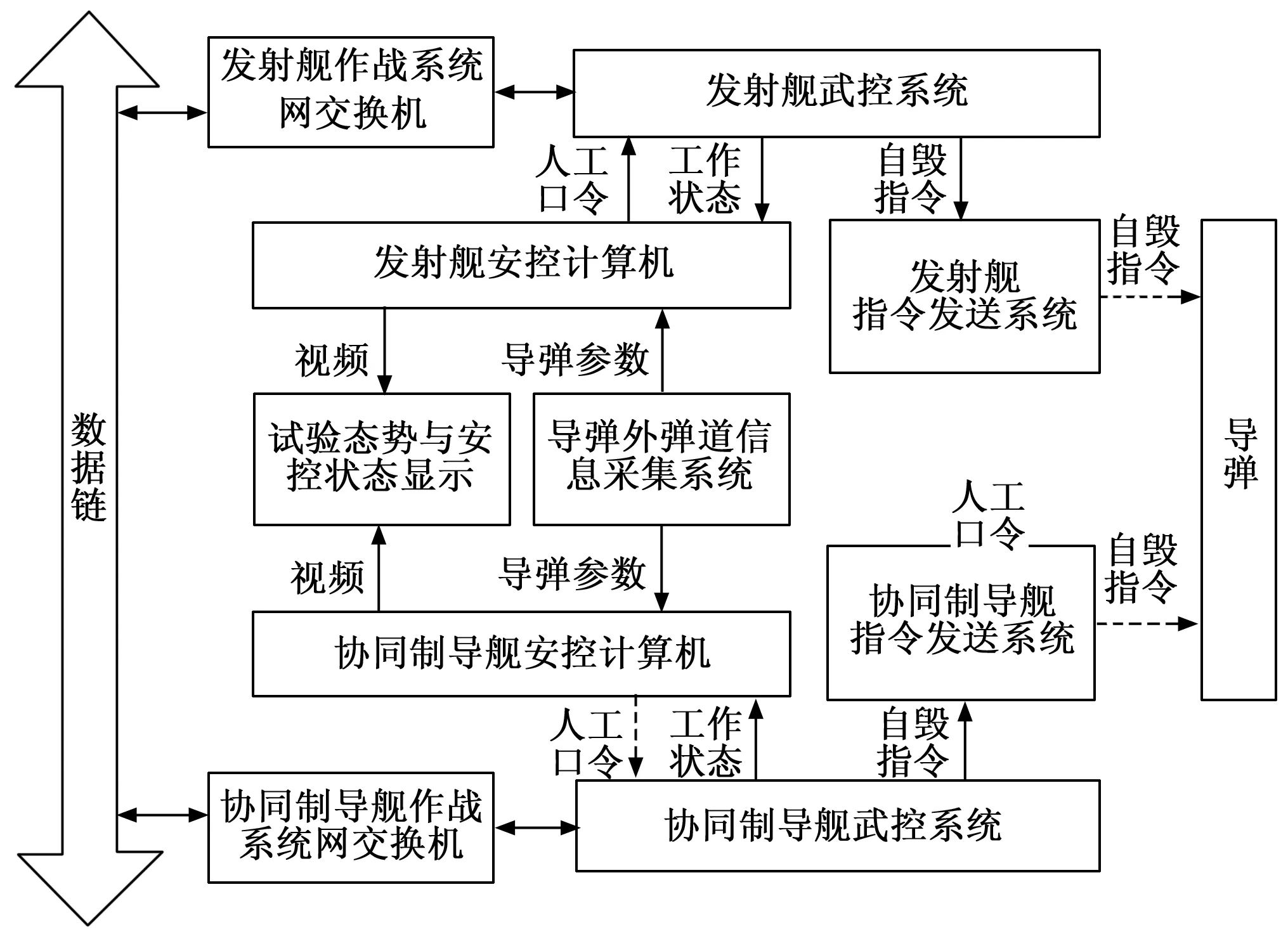
圖3 被動安控系統組成圖
其中,導彈外彈道信息采集系統實時提供導彈的位置、速度參數[7];安控計算機為運行安控軟件的計算機,安控軟件承擔處理安控相關數據并進行導彈自毀判斷的任務,安控計算機需要分別放置在導彈發射平臺和導彈協同制導艦上。
3.2 安全管道設置及導彈自毀殘骸落點估算
安全管道即導彈在正常工作情況下飛行的區域。正常情況下,彈道水平面投影約為發射點與命中點之間的一條直線,取理論彈道水平投影為基準,根據具體試驗彈道確定安全管道長度;綜合考慮目標速度起伏、導彈初始姿態擾動、導彈飛行高度等因素確定安全管道的寬度;將相對0至最大飛行高度的一個空間區域作為安全管道的高度。
當導彈在空中自毀后,彈體結構分解,形成總數不定、大小不等的碎片。由于碎片無規則的氣動外形,其氣動阻力系數與完整彈體相比有很大增加,其自由飛散區域將大為縮小,要準確估算碎片的飛散距離非常困難,可根據陸上飛行試驗導彈殘骸落點分布數據,使用保守估計的氣動阻力系數對殘骸落點進行估算[8],即假設導彈自毀后斷裂為兩段,前段還保留有較為完整的氣動外型,在此基礎上估計其氣動阻力系數,可以認為這樣估算得到的導彈碎片飛行距離大于實際飛行距離。
3.3 被動安控工作流程
實施協同制導飛行試驗,參試的兩艦之間具備實時寬帶數據傳輸能力是必要條件。安控系統可借助艦間數據傳輸能力實現安控信息接力。此時安控基本方案為:在導彈發射平臺和導彈協同制導艦上分別布置1套安控計算機,與艦上相應信息源建立連接。導彈發射后至協同制導之前,由發射平臺安控計算機執行安控判斷,如需自毀由發射平臺指令發送系統發送自毀指令;啟動協同制導時,接力艦安控計算機從接力艦武控系統網或作戰信息網獲取彈動時刻、發射點位置、實際射向以及制導雷達跟蹤數據;接力之后,由接力艦安控計算機執行安控判斷,如需自毀由接力艦制導雷達發送自毀指令。具體工作流程如下:
1)發射平臺武器系統收到目標跟蹤數據后,發射平臺安控計算機通過專用數據鏈路從武控系統網獲取目標信息;
2)發射時刻,發射平臺安控計算機從武控系統網上獲取彈動時刻、發射點位置及實際射向,形成導彈飛行安全管道(安全管道以彈動時刻導彈經緯度為起點,指向導彈實際射向);
3)發射平臺安控計算機協同制導艦實時接收導彈外彈道測量數據,對導彈飛行軌跡進行實時監測;
4)導彈發射后,協同制導艦安控計算機實時接收導彈外彈道測量數據,對導彈飛行軌跡進行實時顯示;
5)啟動導彈協同制導時,導彈彈動時刻、發射點位置及實際射向等信息通過艦間數據鏈傳送至協同制導艦武控系統網,導彈協同制導艦安控計算機從武控系統網上獲取彈動時刻、發射點位置及實際射向,形成導彈飛行安全管道;
6)當發射平臺與協同制導艦的導彈制導工作交接完成后,導彈被動安控工作交由協同制導艦繼續執行,協同制導艦安控計算機顯示界面與發射平臺安控計算機一致,安全管道均以彈動時刻導彈經緯度為起點,指向導彈實際射向;
7)此時,發射平臺安控計算機仍然可以接收導彈外彈道測量數據進行安控判斷和顯示,只是僅供發射平臺上了解協同制導后導彈的飛行情況,如需自毀由協同制導艦完成;
8)在導彈飛行試驗過程中,當導彈飛行軌跡偏出安全管道時,由當前制導實施艦的安控計算機發出“危險”提示,同時開始計算導彈自毀殘骸散布區域,當實時計算的殘骸散布區域到達規定的安全區邊界時,安控計算機給出“自毀”提示,提醒指揮員及時采取自毀措施。
3.4 安控軟件方案
安控軟件運行在安控計算機上,是導彈安控的具體實現單元,它具有初始化功能、數據接收及處理功能、導彈殘骸落點預測功能、自毀判斷功能、人機界面顯示功能、模擬顯示與數據回放功能等。
1)初始化功能。
用戶可在軟件人機界面上對以下參數進行設置:
① 裝訂試驗方案;
② 裝訂安全管道特征點、重點保護目標坐標等;
③ 雷達的數據輸出坐標系原點與射向坐標系原點的相對位置。
2)數據接收及處理功能。
數據接收及處理功能如下:
① 接收雷達跟蹤目標數據;
② 接收導彈外彈道數據;
③ 接收發射平臺導航數據;
④ 對接收數據進行有效性判斷;
⑤ 坐標變化,將輸入數據統一轉換到射向坐標系中進行處理。
3)導彈殘骸落點預測功能。
預測導彈殘骸的落點位置、散布范圍。
4)自毀判斷功能。
給出導彈是否需要自毀的判斷結果。
5)人機界面顯示內容。
① 顯示試驗航區電子海圖,電子海圖為矢量圖并具備編輯功能;
② 實時顯示導彈武器系統工作狀態;
③ 顯示安全管道位置,安全管道可根據發射點位置實時變化;
④ 實時顯示導彈、發射平臺的位置、速度以及時間等參數數據;
⑤ 實時顯示導彈殘骸的預測落點位置;
⑥ 顯示外彈道測量數據傳輸狀態、數據是否有效標志;
⑦ 顯示導彈自毀告警、自毀判斷等標志。
6)模擬演示與數據回放設計。
① 能夠脫機模擬導彈正常飛行和故障飛行情況、自毀報警、實時安控;
② 可事后回放。
7)數據處理流程。
安控軟件數據處理流程如圖4所示。

圖4 安控軟件數據處理流程
4 結束語
本文針對中遠程艦空導彈協同制導飛行試驗的實施安全性問題,綜合考慮中遠程艦空導彈制導控制特點、協同制導作戰過程、導彈安全控制措施等,對中遠程艦空導彈協同制導飛行試驗安控方案進行了初步設計。方案設計以單艦制導導彈飛行試驗安全控制實踐經驗和中遠程艦空導彈協同制導作戰過程分析為基礎,貼近試驗工程實際,具有較好的實用價值。后續,隨著武器裝備協同制導作戰模式的逐漸成熟,可根據具體的制導交接方案進一步細化完善本文提出的安控設計方案,為后續中遠程艦空導彈協同制導飛行試驗的安全實施奠定基礎。