基于自然駕駛數據的駕駛員緊急制動行為特征
2018-12-04 08:26:52朱西產沈劍平
同濟大學學報(自然科學版) 2018年11期
吳 斌, 朱西產, 沈劍平
(1.同濟大學 汽車學院,上海 201804;2.國家機動車產品質量監督檢驗中心(上海),上海 201805)
緊急工況下駕駛員行為研究是開發先進駕駛輔助系統(ADAS)的前提.駕駛員在緊急工況下的避撞行為主要分為緊急制動和轉向兩大類,本文主要研究駕駛員的緊急制動行為特征.縱向避撞系統,如前碰預警系統(FCW)、緊急制動系統(AEB)等,只考慮車輛縱向運動方向上的危險.國內外的研究表明,追尾事故占比很高[1].李霖等[2]對行車記錄儀采集到的危險場景進行統計,結果表明追尾危險場景占比20.2%.將追尾危險場景中的駕駛員緊急制動行為特征作為設計開發輸入,對建立緊急制動系統、前碰預警系統有重要意義.
目前研究駕駛員緊急制動行為的方法有以下幾種:交通事故數據方法、自然駕駛行為方法、場地測試方法、駕駛模擬器試驗方法.通過交通事故數據可獲取典型事故場景,但得到的車輛參數和駕駛員行為參數并不多,準確性很難保證;場地測試和駕駛模擬器試驗也存在缺陷,不能完全與真實交通工況中的場景相對應.隨著駕駛行為研究的深入,自然駕駛數據得到了越來越多的重視.自然駕駛行為研究(NDS)是指在不干擾駕駛員行為的前提下記錄真實交通環境中駕駛員行為的研究方法[3-4],因此通過自然駕駛工況提取出的駕駛員行為完全是真實的駕駛員行為.不同地區和國家的駕駛員駕駛習慣不同,故有必要研究我國駕駛員在真實交通環境下的緊急制動行為特征.
駕駛員緊急制動行為特征的研究主要集中在緊急制動反應時間和緊急制動輸入特性兩方面[2].
緊急制動反應時間通常指從潛在危險出現的時刻到駕駛員開始采取某種避讓措施的時間段[5].Green[5]的研究表明,駕駛員在追尾事件有完全預期的情況下緊急制動反應時間為0.70~0.75 s,對于突發事件的緊急制動反應時間為1.25 s.Brunson等[6]的研究表明,駕駛員的緊急制動反應時間近似服從對數正態分布,約為1.36 s.Chang等[7]發現車速對駕駛員的緊急制動反應時間有影響,車速從40 km·h-1升高到64 km·h-1,緊急制動反應時間縮短0.5 s.Schweitzer等[8]的研究認為,車速和駕駛員的緊急制動反應時間無相關性.國內外對于緊急制動反應時間的研究較多,但由于測試環境不同,因此得出的研究結果之間差異較大,而且對于真實交通環境下的駕駛員緊急制動反應時間的研究較少.
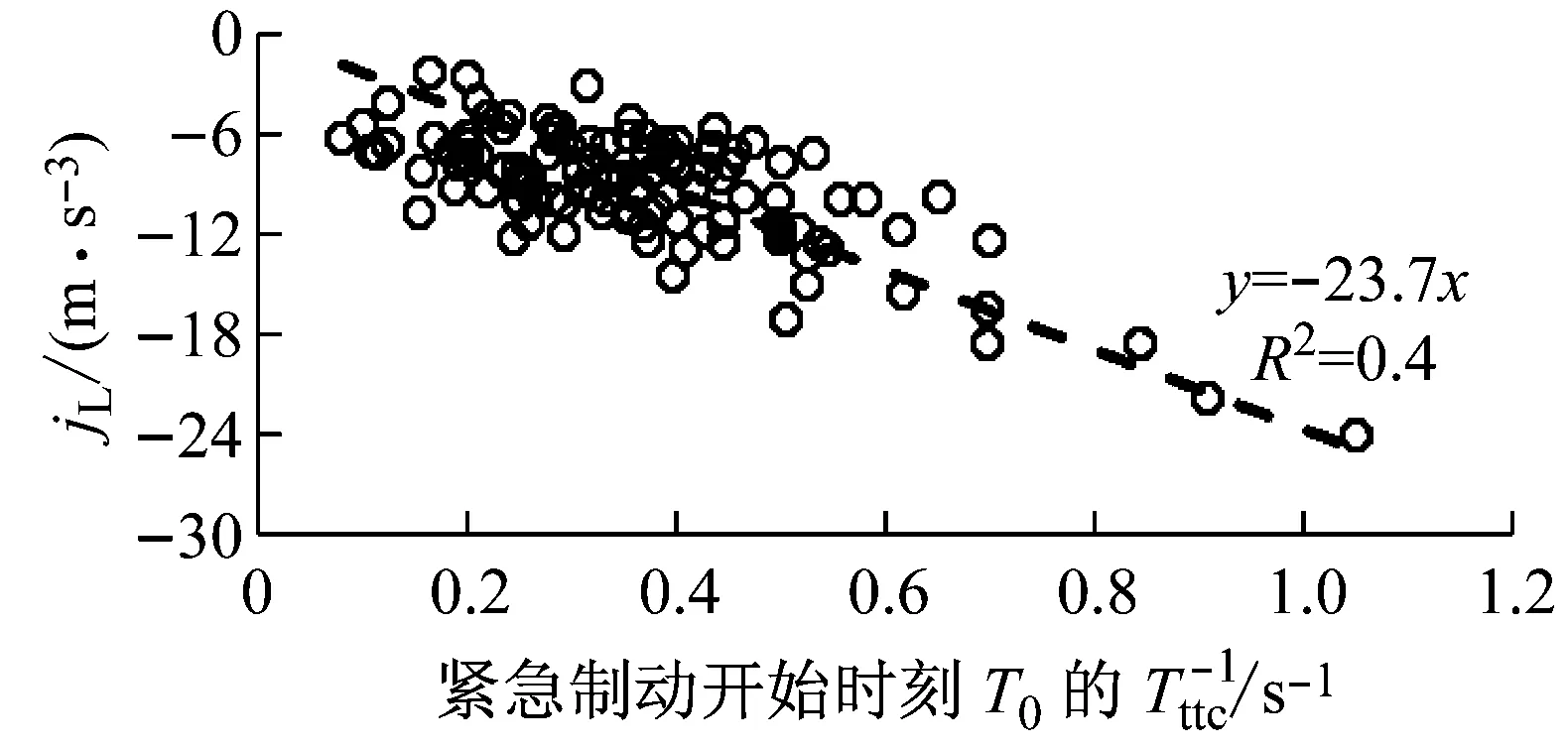
緊急制動輸入特性方面,李霖等[9]對危險場景下駕駛員的制動減速度、制動減速度梯度進行了統計分析,由于采集設備(行車記錄儀)的局限性未定量分析影響緊急制動輸入特性的因素.Bosetti等[10]通過場地測試對駕駛員在駕駛過程中的縱向和橫向加速度范圍進行了統計分析,駕駛員的制動減速度分布與車速無關,大部分駕駛員的制動減速度小于3 m·s-2,但未深入研究駕駛員緊急制動場景下的制動輸入特性.Smith等[11]、Lee等[12]將路面的最大摩擦力和車輛的極限性能作為駕駛員的最大制動減速度輸入,未考慮駕駛員的駕駛習慣.目前基于自然駕駛數據進行駕駛員緊急制動輸入特性的研究還不夠深入,未針對典型危險場景下駕駛員緊急制動行為特征進行系統性分析.
根據國內外的研究現狀,開展兼容我國特殊交通工況的駕駛員緊急制動行為特征研究,是目前開發縱向駕駛輔助系統的難點,也是以人為中心的縱向避撞系統設計和開發的重點.基于中國大型實車路試中的自然駕駛數據,開展駕駛員在典型追尾危險場景下的緊急制動行為特征研究,對駕駛員緊急制動反應時間、最大制動減速度和最大制動減速度梯度進行影響因素分析和概率分布擬合,為開發適合我國駕駛員特征的先進駕駛輔助系統提供依據.
1 自然駕駛數據的采集和篩選
為了研究駕駛員在真實交通環境下的駕駛行為,本文所使用的數據全部來自中國大型實車路試(China-FOT)的自然駕駛數據.China-FOT數據來源有:①汽車總線;②外接傳感器,包括獨立加速度傳感器,用于保證數據的完整性和準確性;③眼動儀,用于記錄駕駛員眼球狀態,但由于企業保密,不對該類型數據開放;④攝像頭,分別為前置攝像頭、前置廣角攝像頭、車內駕駛員面部攝像頭、踏板攝像頭(見圖1).數據采集從人、車、路三方面角度出發,采集駕駛員日常駕駛行為數據、車輛行駛運動狀態參數和道路交通環境信息.通過China-FOT項目采集了32名駕駛員的駕駛數據,共計約3 559 h,總行程129 109 km.

圖1 自然駕駛數據采集中的攝像頭視角Fig.1 Imaging view of the cameras in naturalistic driving data collection
本文主要通過車輛的制動減速度、制動減速度梯度、橫向加速度、駕駛員方向盤轉速等4個參數,對自然駕駛數據進行危險場景的篩選[13].本文中制動減速度和制動減速度梯度數值均用負值表示.駕駛員緊急制動場景的篩選參數等級劃分如表1所示.
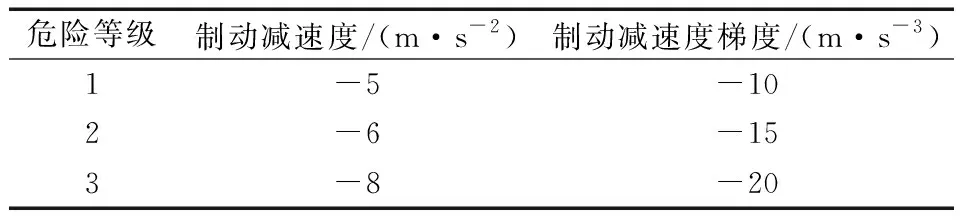
表1 緊急制動場景的篩選參數Tab.1 Filter parameters of emergency braking scenarios
通過上述篩選方法,得到共780例危險工況,其中直行追尾危險工況占比最高(43.83%),也是目前ADAS研究的主要危險場景.本文選取危險等級較高的緊急制動工況121例(排除了部分危險程度較低以及數據不全的工況).
2 駕駛員緊急制動操縱的參數擬合
在緊急工況下駕駛員縱向制動操縱的減速度峰值較高,制動減速度梯度也保持恒定.Markkula等[14]對駕駛員制動減速度模型的分析和對比結果表明,延時恒定減速度模型能更好地擬合駕駛員在緊急情況下的制動操縱,即在一定的制動反應時間延遲后駕駛員以某一制動減速度梯度制動,達到最大制動減速度后保持制動減速度不變至停車.
為了統一提取危險工況下駕駛員操縱參數,利用如圖2所示的延時恒定減速度模型來擬合駕駛員的制動減速度操縱.如圖2所示,T0為駕駛員緊急制動起始時刻,在模型中定為零時刻;a0為初始縱向加速度,aL為最大制動減速度.
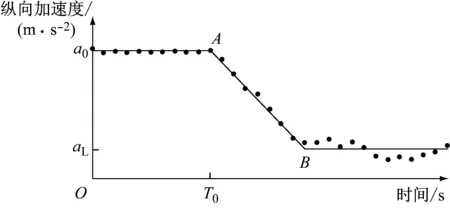
圖2 駕駛員緊急制動模型Fig.2 Driver model for emergency braking
根據自然駕駛數據中駕駛員緊急制動反應時間和駕駛員緊急制動輸入特性數據,可以構建出駕駛員在危險工況中的緊急制動避撞延時恒定減速度模型參數.
表2是工況A1231和A1277的相關參數,圖3和圖4是工況A1231和A1277減速度擬合結果.從表2和圖3、4可以看出,總體上駕駛工況的擬合效果較好,擬合系數的R2均值在0.85以上.
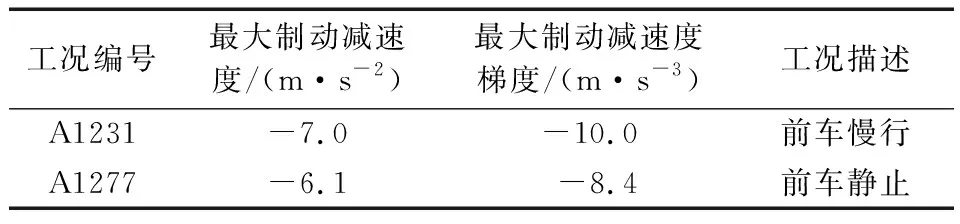
表2 工況A1231和A1277的相關參數和描述Tab.2 Parameters and description of case A1231 and A1277
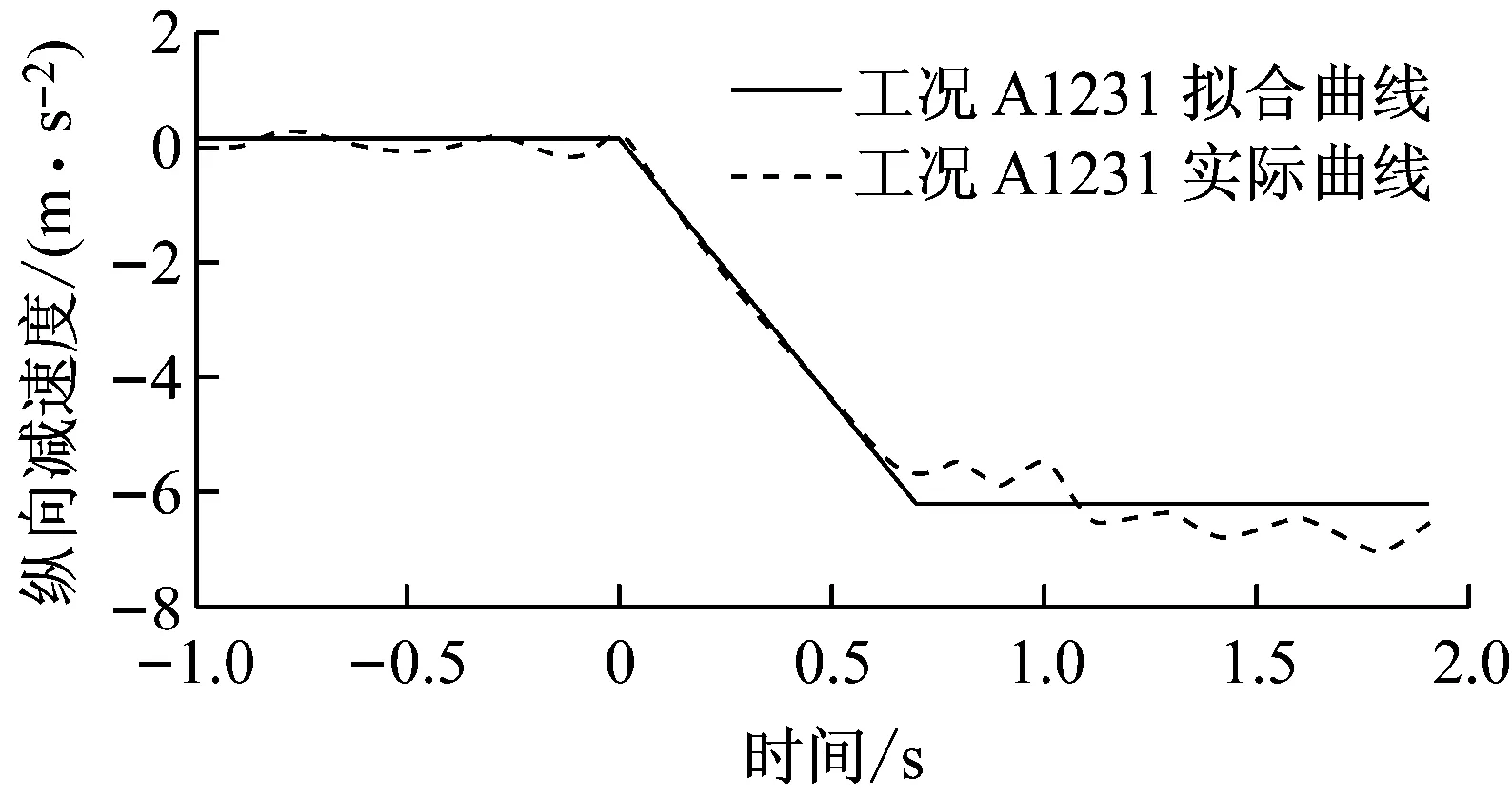
圖3 工況A1231縱向減速度擬合情況Fig.3 Fitting results of deceleration for case A1231
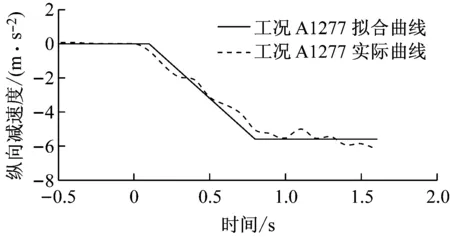
圖4 工況A1277縱向減速度擬合情況Fig.4 Fitting results of deceleration for case A1277
3 駕駛員緊急制動反應時間
T0為緊急制動起始時刻,實際上由于車輛制動系統響應帶來的延遲,因此駕駛員開始制動的時刻比T0更早.將制動系統響應的延遲時間視為駕駛員緊急制動反應時間的一部分[4],駕駛員緊急制動反應時間還包含駕駛員神經滯后和慣性滯后,本文不再細分.
121例追尾危險場景的分類如表3所示.前車突然減速制動的追尾危險工況類型共70例,占58%,此場景下前車制動燈常亮;前車靜止或慢速的追尾危險工況類型共51例,占42%,在此場景下前車的制動燈并不是常亮.
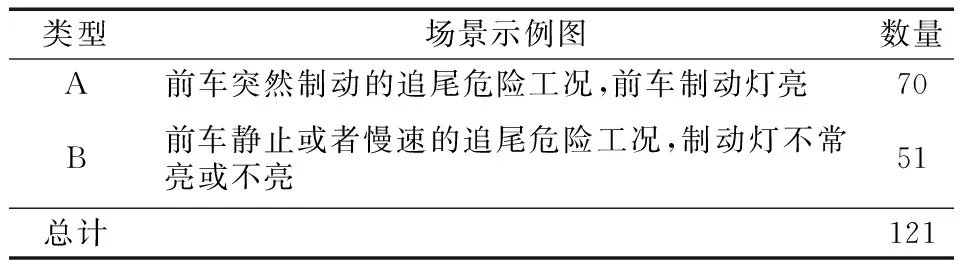
表3 追尾危險場景的分類Tab.3 Category of rear-end scenarios
3.1 緊急制動場景的環境參量劃分

為了獲得緊急制動危險場景下的TTC分布,對緊急制動場景下的TTC分布進行數據統計分析.在駕駛舒適區域,駕駛員一般保持跟車或自由駕駛狀態,此時本車與前車的TTC趨于無窮大;當前車制動或慢行時,TTC逐漸變小,進入駕駛沖突區域.在駕駛沖突區域如果環境條件允許,駕駛員就會采用變道來保證通行效率或者制動減速來避免碰撞;如果駕駛員一開始未采取合適措施,TTC進一步變小,進入駕駛危險區域,最后駕駛員就必須采取緊急避撞措施.駕駛舒適區域和沖突區域屬于駕駛員正常駕駛工況.
根據上述分析隨機選取正常駕駛狀態中的變道工況80例,并提取變道時的TTC.圖5為80例正常變道工況與121例緊急制動工況TTC分布情況,利用支持向量機的界限分割方法劃分正常工況與緊急制動工況的TTC邊界,可知緊急制動工況的Tttc<5.0 s.
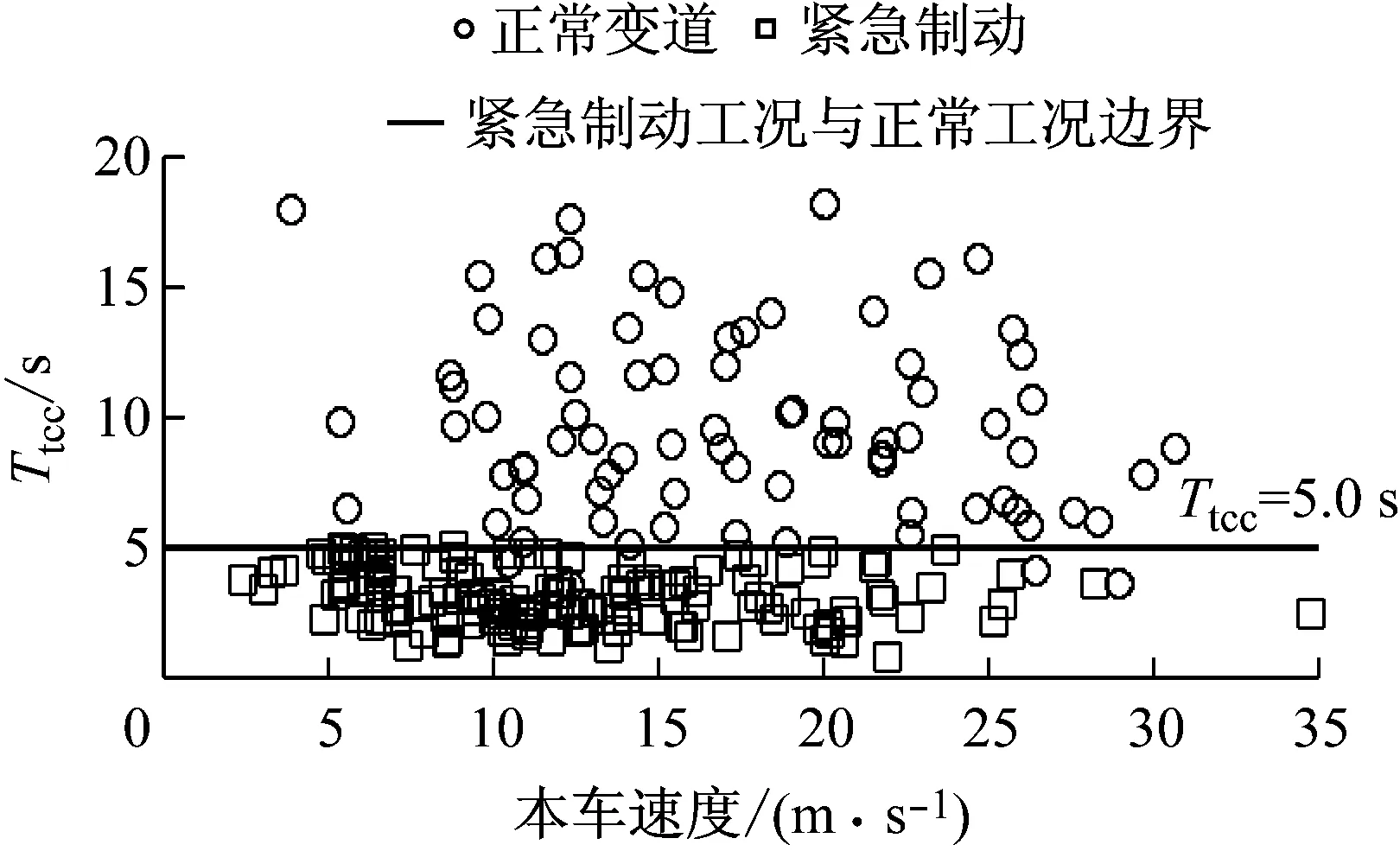
圖5 緊急制動場景的TTC分布Fig.5 TTC distribution of emergency braking scenarios
3.2 不同場景的緊急制動反應時間分布
根據前述追尾危險場景危險出現時刻的定義,以及緊急制動擬合的制動開始時刻T0,分析121例直行追尾危險工況的緊急制動反應時間分布.
圖6為70例前車突然制動的追尾危險工況下駕駛員緊急制動反應時間分布,其中n、u、σ分別為對數正態分布擬合的樣本數、均值和標準差.從前車制動燈亮到駕駛員開始制動時刻的持續時間為駕駛員的緊急制動反應時間,對其進行對數正態分布擬合,擬合相關系數R=0.80,與Brunson等[6]、李霖等[2]的研究結論一致.對于70例前車減速制動的追尾危險工況,駕駛員的緊急制動反應時間分布較分散,對數正態分布的均值為1.96 s,有些工況駕駛員緊急制動反應時間甚至在4.00 s以上.
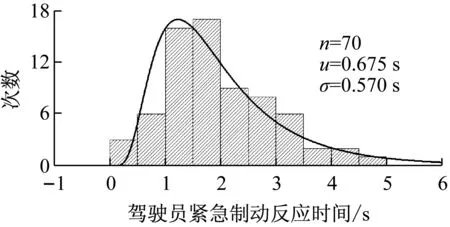
圖6 追尾危險場景A中駕駛員緊急制動反應時間分布及擬合
Fig.6Distributionandfittingresultsofdriver’semergencybrakingresponsetimeinrear-endscenarioA

Fig.7Distributionandfittingresultsofdriver’semergencybrakingresponsetimeinrear-endscenarioB
3.3 緊急制動反應時間和的關系



圖到T0的持續時間分布及擬合Fig.9 Distribution and fitting results of time from s-1 to braking onset T0
在研究緊急制動反應時間時,國內外大部分學者將緊急制動反應時間理解為駕駛員在大腦中處理觀察到的信息,然后做出制動操縱行為的時間過程.通過上述分析,駕駛員的緊急制動反應時間與車輛之間的運動關系密切相關,當車輛的相對運動關系達到一定的危險觸發閾值時,駕駛員便會迅速采取緊急制動措施.
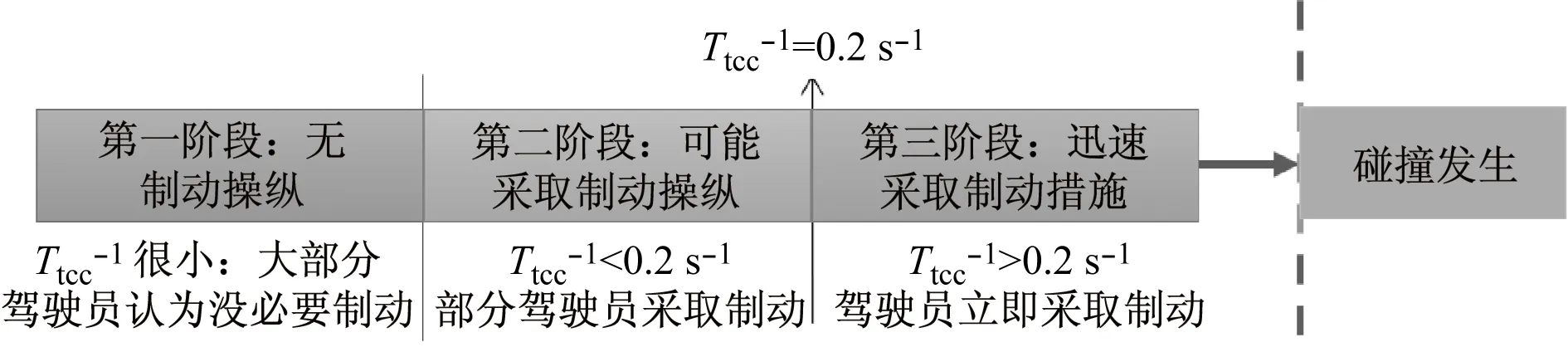
圖10 駕駛員緊急制動反應的3個階段Fig.10 Three phases of driver’s emergency braking response

4 駕駛員緊急制動輸入特性
4.1 駕駛員緊急制動輸入特性的統計分析
采用駕駛員緊急制動擬合方法,提取制動減速度和制動減速度梯度進行緊急制動輸入特性研究.
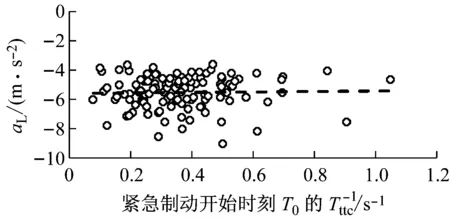
圖11 最大制動減速度與緊急制動開始時刻T0的Tttc-1關系

4.2 駕駛員緊急制動輸入的概率分布與討論
駕駛員的最大制動減速度與駕駛工況緊急程度無關.通過自然駕駛數據的視頻分析可知,在危險駕駛工況下從緊急制動到脫離碰撞危險時,駕駛員通常不再增加制動減速度.在同一駕駛工況下,脫離危險時與前車之間的相對位置等受駕駛員駕駛風格影響較大.

在緊急制動工況下未發生碰撞,駕駛員的制動過程在其操控能力范圍內,是駕駛員在意識到危險存在時的正確反應,反映了駕駛員在這些工況下的預期.在大部分危險工況下車輛的最大制動減速度都未達到車輛或路面的極限情況,故以車輛物理極限來設計的駕駛輔助系統是不合理的,需要考慮駕駛員的緊急制動特征,如圖11所示.
利用正態分布對最大制動減速度aL進行擬合(見圖13),正態分布均值u=-6.1 m·s-2,標準差σ=1.2 m·s-2.
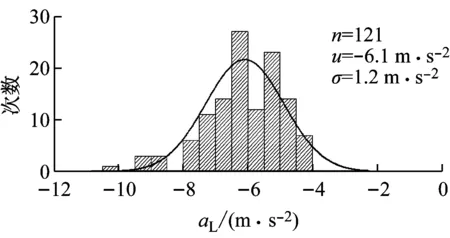
圖13 最大制動減速度分布及擬合
Fig.13Distributionandfittingresultsofdriver’smaximumbrakingdeceleration
(1)
駕駛輔助系統通過KB可以預判駕駛員在危險工況下的緊急制動行為,從而估計駕駛員是否能夠合理避免碰撞的發生;另一方面,KB的取值也可根據駕駛員的不同駕駛習慣進行調整,使得駕駛輔助系統更加擬人化.
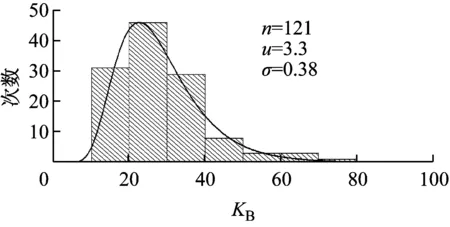
圖14 線性放大因子KB的分布及擬合
Fig.14DistributionandfittingresultsoflinearscalingfactorKB
5 結語


猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
汽車實用技術(2022年7期)2022-04-20 11:44:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
科技傳播(2019年22期)2020-01-14 03:06:54
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
汽車電器(2018年1期)2018-06-05 01:22:54
汽車工程學報(2017年2期)2017-07-05 08:13:02
