電動公交車用增程器起停及切換過程優化
2018-12-04 08:34:14樓狄明譚丕強胡志遠
同濟大學學報(自然科學版) 2018年11期
徐 寧, 樓狄明, 譚丕強, 胡志遠
(同濟大學 汽車學院,上海 201804)
增程式電動車具有結構及控制相對簡單等特點,逐漸成為新能源汽車的一條重要技術路線[1-3].在乘用車領域,多通過小型化的兩缸、三缸以及轉子發動機等來解決效率及振動噪聲問題[2].在公交客車等商用車領域,增程器多匹配柴油機,并且增程器控制策略主要以實現基本功能為目標.研究表明,功率跟隨控制策略下增程器需要快速起停技術來進一步降低油耗[3],這將導致發動機暖機起停頻繁,同時帶來振動噪聲等問題[4].增程式電動公交車還存在饋電狀態時加速時間長的問題,為了在饋電時發動機能快速輸出功率來補充電機消耗的電功率,需要進行快速功率跟隨控制策略設計.現有的增程器功率跟隨控制策略主要有發動機調速和發電機調速兩大類.清華大學采用基于前饋和反饋的控制進行調速[3,5],湖南南車時代電動汽車股份有限公司以及中國汽車設計研究院則進行了發動機電子控制單元(ECU)重新開發[6],在發動機控制器中增加了轉速閉環控制;上海牌增程式電動轎車采用了發電機調速模式[7].
本文進行了公交車用增程器起停過程控制策略優化,并設計了發動機調速和發電機調速2種基于前饋和反饋的工況切換策略.最后,基于半實物仿真平臺進行了優化試驗研究.
1 試驗設備及方案
研究對象為某增程式電動公交車,整車參數如表1所示.所搭建的半實物仿真平臺如圖1所示.采用Matlab/Simulink進行建模,通過Motohawk快速開發平臺進行代碼編譯并移植到Mototran ECM-0565-128控制器上,控制器采用的是Motorola MPC565芯片.動力電池初始荷電狀態(SOC)為30%,增程器采用多點式控制策略[7-8].

表1 整車結構參數Tab.1 Vehicle parameters
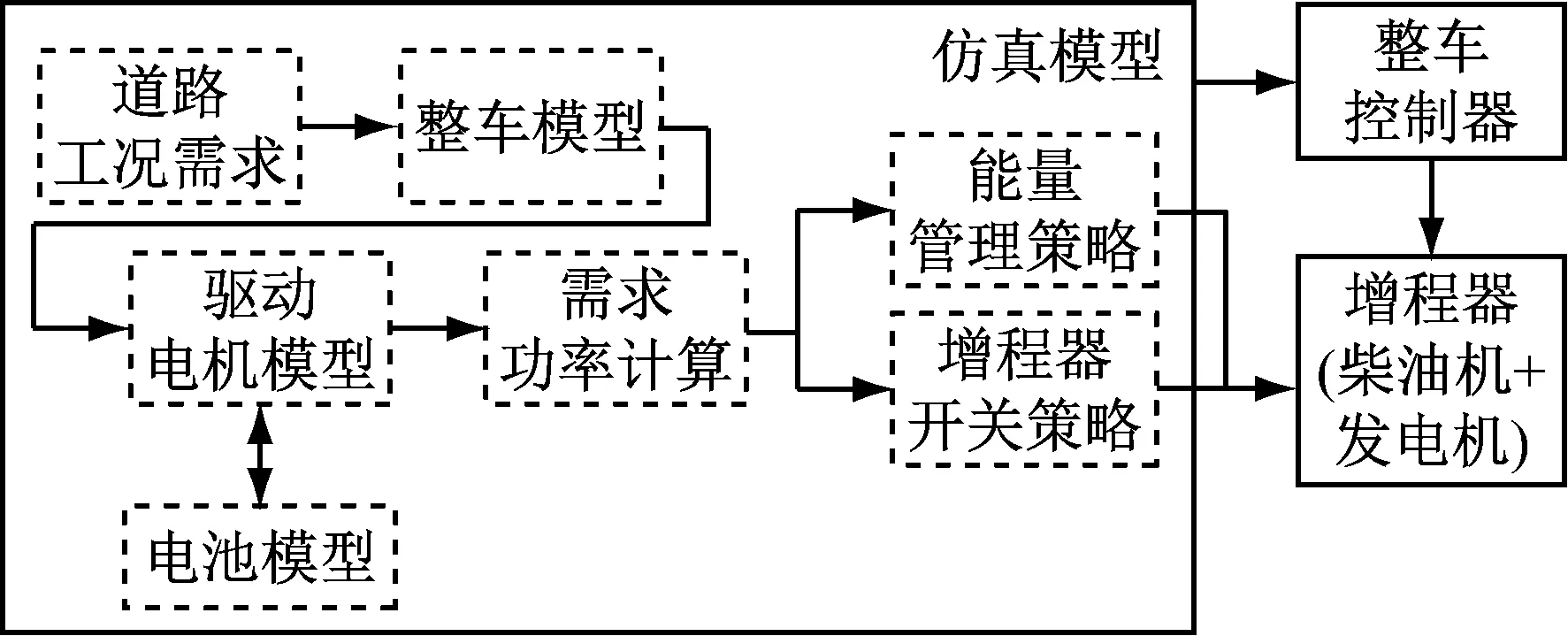
圖1 半實物仿真系統框架圖Fig.1 Semi-physical system block diagram
增程器匹配某1.9 L四缸柴油機,最大功率為71 kW,對應轉速為3 000 r·min-1.試驗燃料為國V柴油.采用永磁同步電力測功機模擬增程器用發電機.整車控制器通過CAN(controller area network)總線與發電機控制器進行通信,并通過控制電壓輸出來控制發動機油門開度.整車控制器采集發動機磁電轉速傳感器轉速信號,并通過CAN采集發電機轉速.ES590結合可標定BOSCH ETK進行發動機噴油參數標定.采用測試粒徑范圍為5.6~560 nm的TSI EEPS 3090顆粒粒徑測試儀進行柴油機超細顆粒排放數量分析.試驗系統如圖2所示.

圖2 增程器和試驗系統Fig.2 Range extender and experimental system
2 試驗結果
2.1 暖機起動過程
增程器暖機起動試驗過程中,發動機水溫控制在65 ℃左右。依靠發電機倒拖使發動機起動,并通過控制發電機倒拖轉矩和倒拖終了轉速來控制起動過程.由于增程器轉動慣量較大,發電機倒拖過程消耗的功率較大,不宜采用過大倒拖轉矩.通過標定系統進行了起動過程發動機噴油限制,試驗設置及起動過程所需時間試驗結果如表2所示.

表2 起動策略優化測試方案Tab.2 Start strategy optimization test scheme
圖3為不同起動策略下發動機轉速響應.從圖3可見,不同起動策略下,轉速達到1 000 r·min-1后完成起動并進入怠速閉環控制.起動過程中在轉速300 r·min-1以及600 r·min-1處都分別出現了一個較小和一個較大的轉速波動峰值.倒拖轉矩增大及倒拖終了轉速提高后,發動機起動時間縮短.在低速不噴油時,發動機起動時間會有所延長.
圖4為不同起動策略下發動機燃空比及超細顆粒排放數量濃度.從圖4可見,雖然超細顆粒數量濃度相對于燃空比有約2 s滯后,但是與燃空比有很強的相關性.起動策略對起動過程超細顆粒數量濃度變化的影響沒有明顯規律.起動過程超細顆粒數量濃度峰值在2.0×108個·cm-3左右.聚集態顆粒只在前幾個發動機循環內占比較高.這主要是由發動機過量噴油使燃空比變小引起的.之后的發動機循環內聚集態顆粒占比都低于10%,這主要是因為燃空比較小,芳香烴等高分子有機物生成增加,導致生成的二次核態顆粒物增加.
倒拖終了轉速提高及發動機低速不噴油都會使起動階段聚集態顆粒占比明顯降低,如圖5所示.
不同起動策略下起動時間、油耗、超細顆粒數量濃度以及電耗對比如圖6所示,相對系數為各起動策略對應性能參數相對該性能參數下最大值的比值.從圖6可見,較大倒拖轉矩以及較高倒拖終了轉速會加快起動過程,較高倒拖終了轉速的電耗明顯增加,而較大倒拖轉矩的電耗增加不明顯.較高倒拖終了轉速下發動機低轉速不噴油時,起動過程油耗較低,但起動時間延長,起動電耗也有所增加,而且起動過程超細顆粒排放沒有明顯改善.雖然較大倒拖轉矩以及較高倒拖終了轉速對應電耗較大,但是具有可以加速起動的優勢,對應倒拖轉矩120 N·m、倒拖終了轉速900 r·min-1時,起動時間只有1.01 s,適合暖機快速起動.
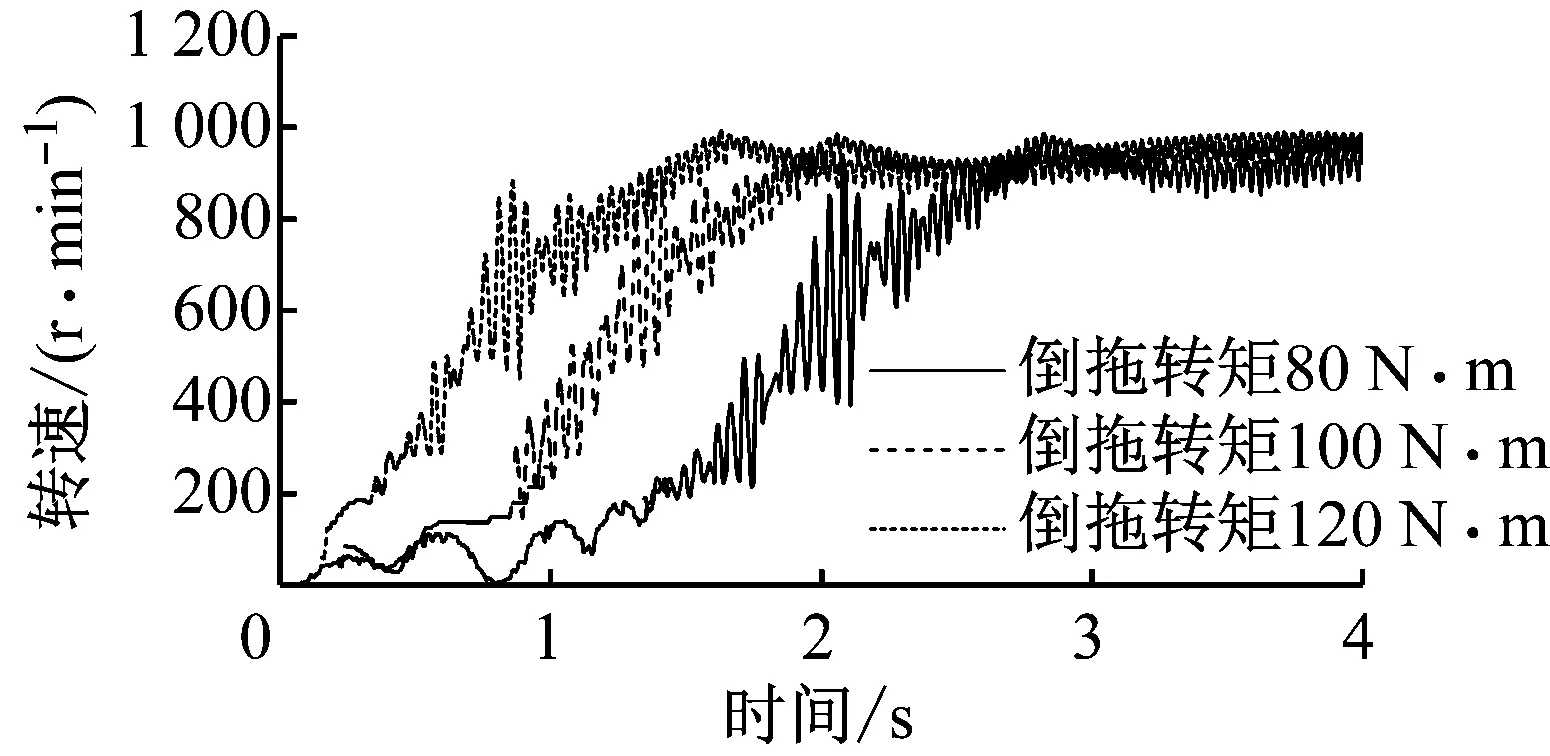
a 發電機倒拖至600 r·min-1

b 發電機倒拖至900 r·min-1

c 發電機倒拖至900 r·min-1且發動機低速不噴油圖3 不同起動策略下發動機轉速特性Fig.3 Engine speed characteristics under different start strategies
2.2 停機過程
圖7所示為自由停機(停機1)過程發動機轉速變化特性.
從圖7可以看出,自由停機過程中,發動機在轉速300 r·min-1以及600 r·min-1處分別出現了一個較大和一個較小的轉速波動峰值,在轉速為600r·min-1附近發動機轉速波動峰值最大可達195r·min-1,同時伴隨著明顯的停機噪聲,而在300r·min-1附近發動機轉速波動峰值為80 r·min-1.
在發動機不噴油的狀態下,采用發電機倒拖發動機來測試瞬時發動機轉速,并分析其在起停轉速范圍的軸系扭振(包含滾振和扭振),如圖8所示.
從圖8可以看出,在起停轉速范圍的較低轉速時,發動機軸系扭振角度第2階諧量比較大,且在300 r·min-1附近最明顯,扭振角度高達400 °CA,這主要是由驅動氣門的凸輪軸系特性引起的[9].當轉速大于400 r·min-1后,發動機軸系扭振角度第1階諧量更加明顯,在600 r·min-1左右扭振角度最大,高達1 000 °CA,這主要是由曲軸軸系系統固有特性決定的.300 r·min-1和600 r·min-12個轉速附近,共振更明顯,從而導致停機過程轉速波動較大并帶來噪聲.

a 發電機倒拖至600 r·min-1

b 發電機倒拖至900 r·min-1

c 發電機倒拖至900 r·min-1且發動機低速不噴油圖4 不同起動策略下超細顆粒排放數量濃度與燃空比
Fig.4Numberconcentrationofultrafineparticlesandair/fuelratiounderdifferentstartstrategies
為了減少停機過程的轉速波動,嘗試在停機過程采用關閉節氣門來抑制作為轉速波動激勵源的氣體力和快速穿越共振明顯區域2種方法,以減少轉速波動.在關閉節氣門的策略下,起停轉速范圍內發動機軸系扭振特性如圖9~11所示.
從圖9~11可見,進氣門關閉后,扭振角度第1階諧量明顯減少,這主要是因為減少了作為激勵源的氣體力,而扭振角度第2階諧量卻基本不變.

a 發電機倒拖至600 r·min-1

b 發電機倒拖至900 r·min-1
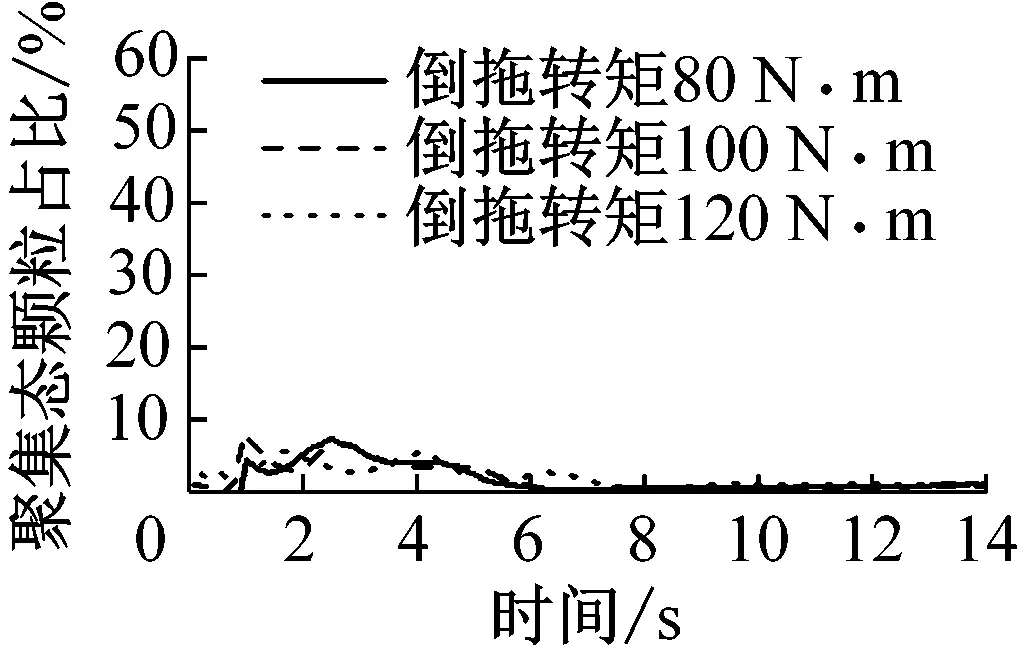
c 發電機倒拖至900 r·min-1且發動機低速不噴油圖5 不同起動策略下聚集態顆粒數量占比對比
Fig.5Ratioofaccumulationmodeultrafineparticlestoallparticllesunderdifferentstartstrategies

圖6 不同起動策略下主要性能對比Fig.6 Comparison of main performances under different start strategies
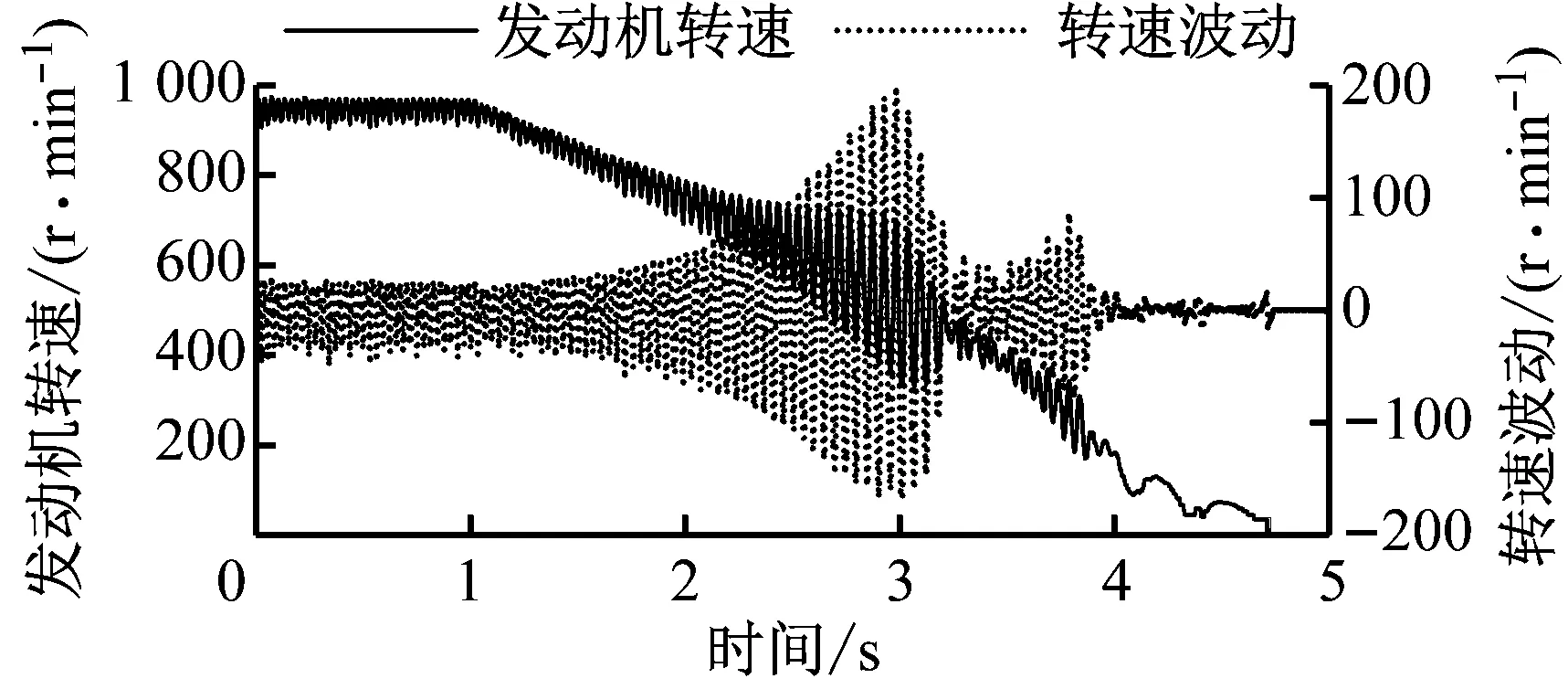
圖7 自由停機過程發動機轉速變化特性Fig.7 Engine speed variation characteristics during normal stop
分別采用節氣門關閉和發電機加載的負載停機來抑制發動機軸系扭振,負載停機控制策略如圖12所示.停機負載分別設置為40 N·m(停機2)和80 N·m(停機3).負載脫離轉速設置為300 r·min-1,既保證停機過程600 r·min-1和300 r·min-1的轉速波動減少,又能夠防止增程器反轉.

圖8 節氣門開啟時扭振角度頻譜圖Fig.8 Spectrum of torsion angle with throttle opened
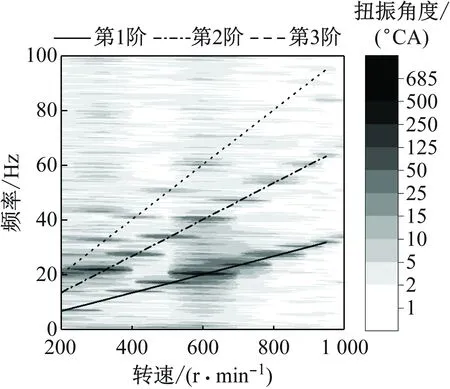
圖9 節氣門關閉時扭振角度頻譜圖Fig.9 Spectrum of torsion angle with throttle closed

圖10 節氣門開啟或關閉時轉速波動情況
Fig.10Enginespeedvariationwiththrottleopenedorclosed
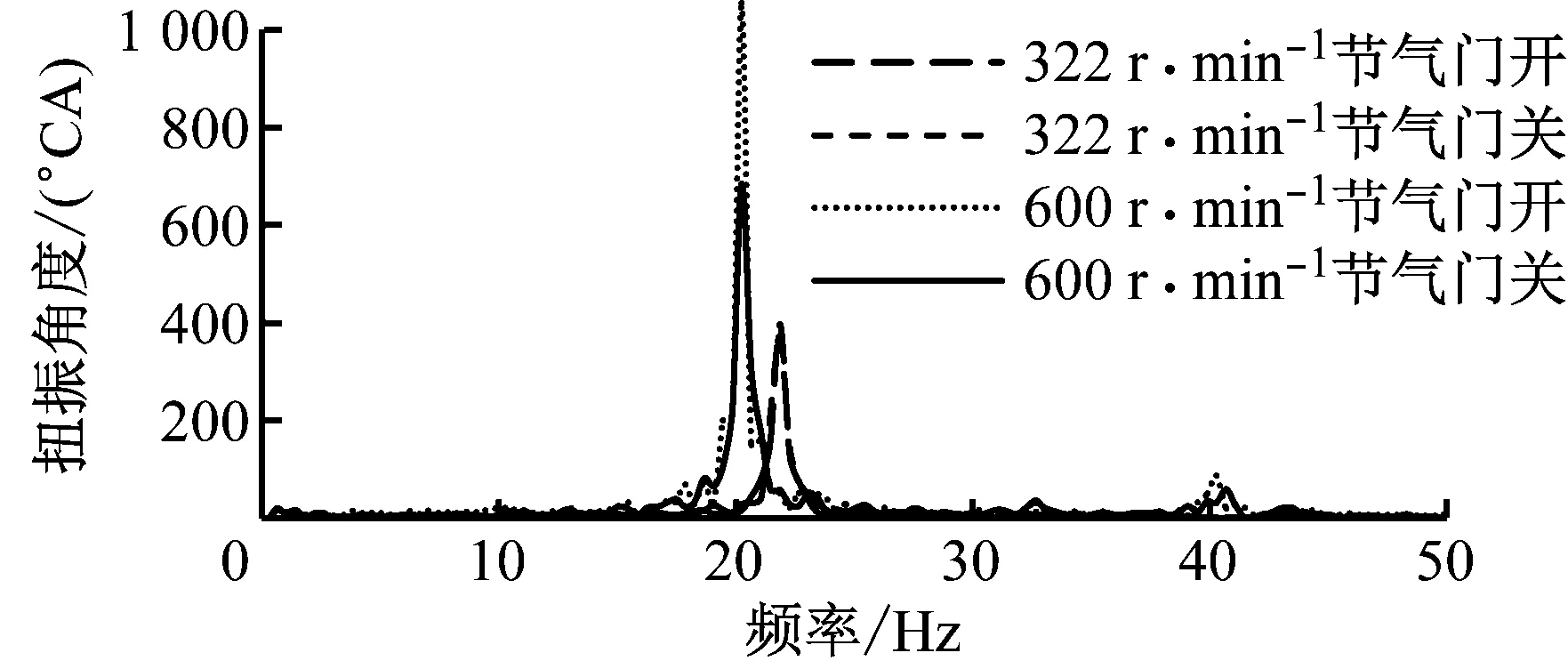
圖11 節氣門開啟或關閉時扭振角度Fig.11 Torsion angle with throttle opened or closed

圖12 停機過程控制策略Fig.12 Control strategy of stop
試驗結果如圖13所示.從圖13可以看出,節氣門關閉和負載停機都會使發動機轉速波動明顯減少,如表3所示.節氣門關閉之后,發動機轉速波動有所減少,在自由停機過程第1階共振最大轉速的600 r·min-1附近轉速波動減少了61 r·min-1,而第2階共振最大轉速的300 r·min-1附近變化不明顯.負載停機過程相對自由停機過程,轉速波動減少很明顯,40 N·m和80 N·m負載停機過程相對自由停機過程中第1階共振最明顯時對應轉速600r·min-1附近轉速波動分別減少了50 r·min-1和81 r·min-1.采用80 N·m負載停機,噪聲也得到緩解.
2.3 切換過程
切換過程即為功率跟隨過程.采用如圖14所示的發動機調速和發電機調速2種基于前饋和反饋的控制策略.
針對增程式電動公交車0~50 km·h-1滿負荷加速過程,分別采用2種調速模式并設計了4套控制策略組合,進行半實物仿真下增程器控制策略對比試驗.控制策略組合及0~50 km·h-1加速時間和動力電池荷電狀態如表4所示.

a 節氣門開啟

b 節氣門關閉圖13 不同停機策略下發動機轉速波動
Fig.13Enginespeedvariationcharacteristicsunderdifferentstopstrategies
表3停機策略對停機過程轉速波動的影響
Tab.3Effectofstopstrategyonenginespeedvariationcharacteristics

試驗600 r·min-1附近轉速波動/(r·min-1)300 r·min-1附近轉速波動/(r·min-1)停機1/節氣門關閉195/13483/95停機2/節氣門關閉145/9269/47停機3/節氣門關閉114/69108/47

a 發動機調速模式

b 發電機調速模式圖14 基于前饋和反饋的控制策略Fig.14 Transit control strategy based on feedforward and feedback表4 0~50 km·h-1加速過程增程器控制策略Tab.4 Range extender control strategy during 0-50 km·h-1 acceleration process
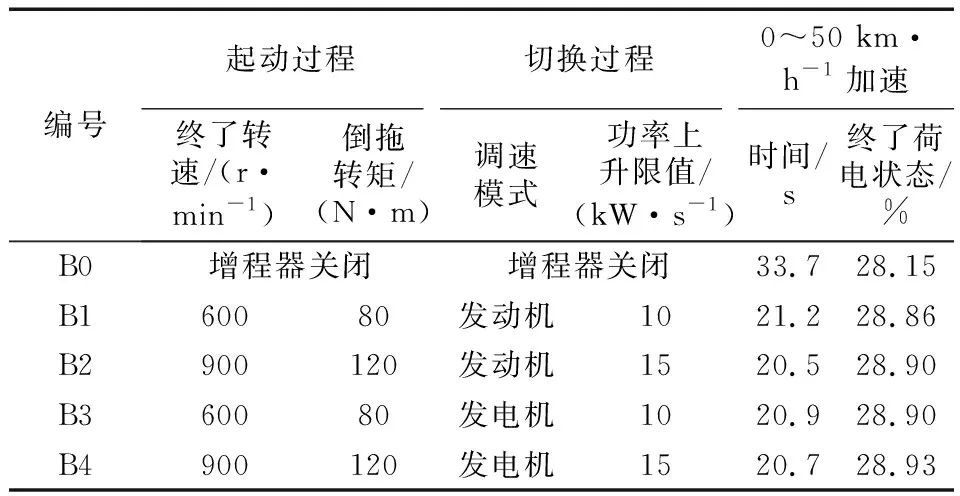
編號起動過程切換過程0~50 km·h-1加速終了轉速/(r·min-1)倒拖轉矩/(N·m)調速模式功率上升限值/(kW·s-1)時間/s終了荷電狀態/%B0增程器關閉增程器關閉33.728.15B160080發動機1021.228.86B2900120發動機1520.528.90B360080發電機1020.928.90B4900120發電機1520.728.93
圖15為增程式電動公交車0~50 km·h-1加速過程驅動電機需求電功率和增程器輸出電功率.

圖150~50km·h-1加速過程驅動電機需求電功率和增程器輸出電功率
Fig.15Electricpowerofe-drivemotorandrangextenderduring0-50km·h-1accelerationprocess
從表4和圖15可以看出,在動力電池荷電狀態較低時,動力電池輸出功率受限制,當驅動電機轉速大于一定轉速時,驅動電機將不能工作在全負荷,因此0~50 km·h-1加速時間達33.7 s.為提升加速性能,需要增程器補充驅動電機電功率,而不同策略下增程器從輸出功率到輸出最大功率都需要一段時間,所以驅動電機無法滿負荷加速,0~50 km·h-1加速時間都大于20 s.發動機調速模式和發電機調速模式下,當采用快速起動策略和較大功率變化率限值時,增程器輸出功率響應速度明顯增大,0~50 km·h-1加速時間變短,分別減少了0.7 s和0.2 s,而荷電狀態變化不大,分別只少增加了0.04%和0.03%.此外,倒拖起動時,如果電池輸出電功率能夠同時滿足驅動電機外特性和倒拖發動機電功率需求,整車加速性能就不受倒拖起動影響,否則加速性能將變差,但不明顯.
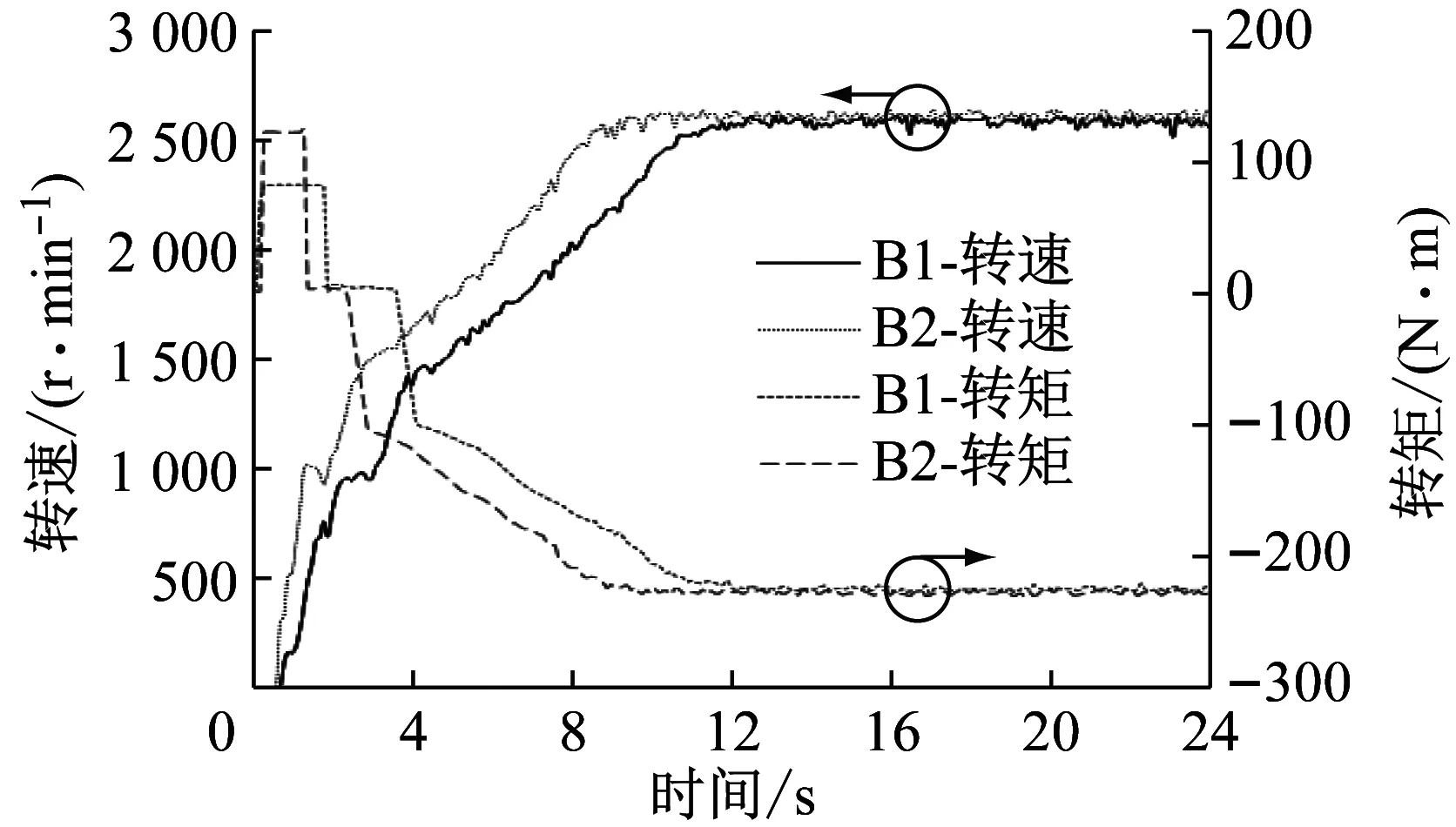
圖16為不同調速模式下增程式電動公交車加速過程增程器轉速和轉矩.從圖15、16可以看出,發動機調速模式下增程器電功率輸出比較平緩,但在發電機調速控制模式下,由于PID控制器對發動機轉矩的調節,增程器先完成加速過程后才輸出電功率,導致增程器輸出電功率有所滯后和波動.
a 發動機調速模式

b 發電機調速模式圖16 0~50 km·h-1加速過程增程器轉速和轉矩響應
Fig.16Speedandtorquecharacteristicsofrangeextenderduring0-50km·h-1accelerationprocess
圖17所示為2種調速模式下增程式電動公交車加速過程發動機工況點分布情況.

圖17 0~50 km·h-1加速過程發動機工況點分布
Fig.17Engineworkingpointdistributionduring0-50km·h-1accelerationprocess
從圖17可以看出,發電機調速模式下,發動機工況點分布主要集中在最優工作曲線附近,而發動機調速模式下,當目標轉速增大時,PID控制系統輸出正轉矩,在目標轉矩不減小時,發動機輸出轉矩有增大的趨勢,因此發動機工況點分布將由最優工作曲線向較大轉矩的外特性曲線偏移.當輸出功率上升限值增大后,PID控制輸出的正扭矩也增大,發動機工況點分布將更向外特性曲線偏移.此外,在發動機最優工作曲線距離外特性較近時,容易出現提速緩慢甚至無法提速現象,這都將導致發動機油耗的惡化.
圖18所示為2種控制模式下增程式電動公交車加速過程發動機超細顆粒數量濃度排放特性.
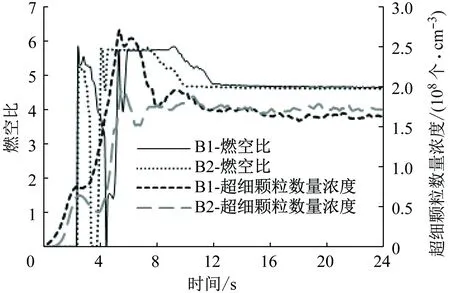
a 發動機調速模式

b 發電機調速模式圖18 加速過程超細顆粒數量濃度和燃空比
Fig.18Numberconcentrationofultrafineparticlesandair/fuelratioduringaccelerationprocess
從圖18可以看出,增程式電動公交車加速過程超細顆粒排放變化特性相對燃空比滯后,發動機模式和發電機模式對超細顆粒數量濃度影響不明顯,超細顆粒數量濃度峰值不是出現在起動階段,而是出現在加速加載階段,為2.5×108個·cm-3,并且此過程中聚集態顆粒所占比例多達90%.這主要是因為此階段燃空比較大,導致油滴霧化較差,局部缺氧現象嚴重,因此燃燒不完全產生的碳粒增加,聚并而成的聚集態顆粒也增加[10].
3 結論
(1) 倒拖轉矩增大和倒拖終了轉速提高都會加快增程器起動過程,組合作用下起動時間可低至1.01 s.
(2) 停機過程采用負載停機和關閉節氣門停機后,停機過程轉速波動都會減小,但負載停機時更明顯,也更易實現.
(3) 在快速起動和增大增程器輸出電功率上升限值后,電動公交車0~50 km·h-1加速時間有所減少.
(4) 發動機調速模式相對發電機調速模式,功率輸出更加平緩,但發動機工況點分布會偏離發動機最優工作曲線.
猜你喜歡
能源工程(2020年6期)2021-01-26 00:55:22
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
大電機技術(2017年3期)2017-06-05 09:36:02
軍事文摘(2016年16期)2016-09-13 06:15:49
通信電源技術(2016年1期)2016-04-16 04:57:26
汽車與新動力(2015年1期)2015-02-27 12:11:01
電力工程技術(2014年1期)2014-03-20 14:19:06
汽車與新動力(2013年5期)2013-03-11 16:08:17
