基于蓄電池模型參數擬和的新型充電控制策略
2018-12-04 06:15:30馬里千許春雨宋建成武迪
電測與儀表 2018年22期
關鍵詞:模型
馬里千,許春雨,宋建成,武迪
(1.太原理工大學,太原 030024; 2.太原理工大學 煤礦電氣設備與智能控制山西省重點實驗室,太原 030024; 3.礦用智能電器技術國家地方聯合工程實驗室,太原 030024)
0 引 言
隨著綠色可再生能源的快速發展,膠體鉛酸蓄電池作為目前最具投資和成本效益的儲能裝置之一被廣泛應用到新能源發電系統中[1-2],它的使用壽命直接影響到系統的安全可靠運行。相應的膠體鉛酸蓄電池充電技術成為目前研究的熱點。
針對膠體鉛酸蓄電池有多種充電方法,恒流、恒壓、恒流-恒壓充電都屬于傳統充電方法[3],它們都有各自的優缺點。為了進一步提高充電速率和效率,國內外學者相繼提出了一些改進充電方法,比如:間歇式充電方法、脈沖式充電方法、多階段充電方法等[4]。要實現蓄電池最優充電除了要合適的充電方法外還要選擇相應的控制策略來實現對充電電流的精確控制[5]。
以PI控制器為基礎的充電控制策略已經被廣泛應用到蓄電池充電器中,并取得良好的控制效果[6-10]。文獻[6]設計了平滑切換機制來解決充電階段切換過程中電流斷續的問題,但在切換過程中充電電流波動較大。文獻[7]雖然解決了上述問題但是缺少對系統穩態性能的分析。文獻[8]在傳統PI控制的基礎上加入了模糊控制,提高了控制精度,但同時增加了計算量和系統的復雜性。文獻[9]通過引入遇限削弱積分算法來消除雙PI環積分飽和現象,但是在恒壓充電階段充電電流波動較大。文獻[10]在PI控制的基礎上通過改變硬件電路拓撲來實現充電階段的平滑切,但是該方法需要特定的拓撲電路來實現,局限性較大,不易推廣。
文章以膠體鉛酸蓄電池模型的基礎,通過實驗數據擬和出模型參數,采用三階段充電方法(恒流-恒壓-浮充(CC-CV-FC)充電),在傳統單-雙閉環PI控制的基礎上,提出了一種基于電流預測控制的蓄電池充電控制策略,用電流預測控制器來取代傳統單-雙閉環PI控制器中的電流環,簡化控制器復雜程度的同時提高了系統控制性能,避免充電切換過程中由于PI控制參數改變造成充電電流斷續失控的情況。
1 充電系統數學模型
1.1 系統結構
在新能源發電系統中蓄電池一般通過雙向DC-DC變換器與直流母線相連。選用非隔離雙向半橋DC-DC變換器作為該功率變換單元,具體電路拓撲如圖1所示。蓄電池接變換器低壓側,變換器高壓側接直流母線,Cbus、Cbat為濾波電容,L為電感,Q1、Q2為開關管,系統開關頻率20 kHz。
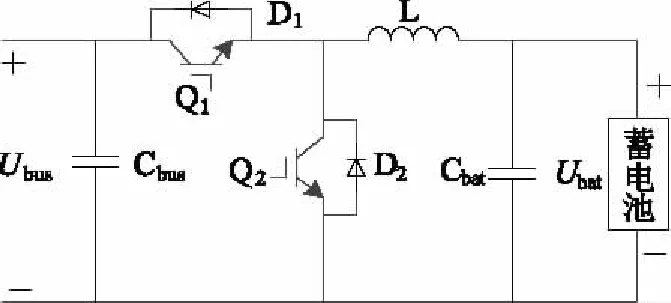
圖1 系統主電路拓撲
1.2 蓄電池模型建立及參數識別
由于蓄電池在充電過程中是電化學反應,具有顯著的非線性與時變性,而充電系統的精確設計對電池模型及其參數適應性要求較高[7]。按照建立模型的復雜程度,電池模型大致可分為電化學模型、神經網絡模型和等效電路模型[10-11]。考慮等效電路模型具有建模簡單、參數易于辨識的優點,決定采用二階RC等效電路模型,電池放電模型如圖2所示。
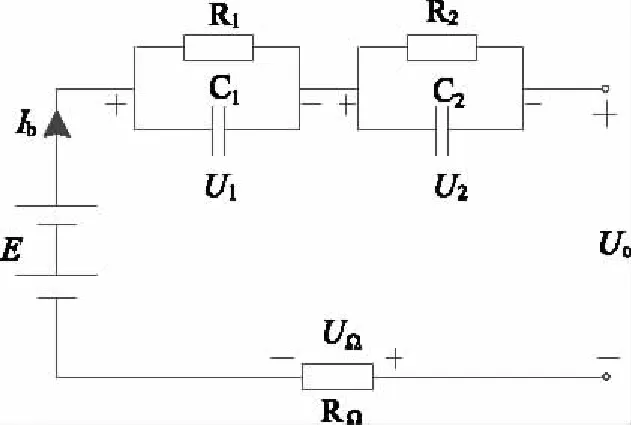
圖2 蓄電池放電模型
當蓄電池處于放電狀態時,其端電壓Uo可表示為式(1):
Uo=E-UΩ-(U1+U2)=E-IbRΩ-
(IbR1(1-et/τ1)+IbR2(1-et/τ2))
(1)
式中RΩ為蓄電池歐姆等效電阻;R1、C1分別為電化學極化等效電阻與電容;R2、C2分別為濃度極化等效電阻與電容;Ib為蓄電池放電電流;E為開路電壓;UΩ為歐姆電壓降;(U1+U2)為極化電壓。
通過脈沖放電法對相關參數進行識別,試驗用單節12 V/17 Ah膠體鉛酸蓄電池,放電電流為15 A,放電時間為10 s,圖3為蓄電池脈沖放電過程中端電壓變化曲線。
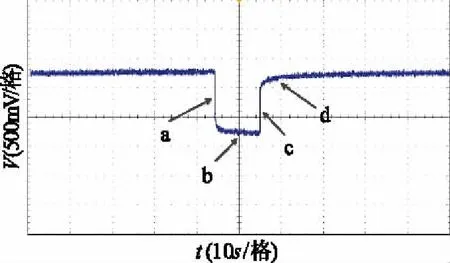
圖3 脈沖放電電壓變化曲線
從圖3放電電壓波形可以看出,蓄電池從開始放電到放電完畢穩定后要經過四個階段:
(1)開始放電時,蓄電池端電壓瞬間降低,這是由于蓄電池歐姆內阻引起的壓降,稱為歐姆壓降,可表示為:
UΩ=IbRΩ
(2)
(2)放電過程中,隨著放電時間的增長蓄電池端電壓逐漸下降,這一現象主要是由電池的極化作用引起的,由于極化作用引起的電壓變化稱為極化電壓,可表示為式(3):
Up=U1+U2=IbR1(1-et/τ1)+IbR2(1-et/τ2)
(3)
(3)放電結束時,蓄電池端電壓瞬間回升,這一現象也是由于蓄電池歐姆內阻引起的,同式(2)。
(4)
(4)放電結束后,蓄電池端電壓逐漸回升直到趨于一個穩定值,這是由于放電結束后極化作用逐漸消失引起的,可表示為式(5)
(5)
記錄蓄電池每次放電過程中階段(1)和階段(3)蓄電池端電壓瞬時變化值,根據式(2)、式(4)計算蓄電池歐姆電阻為:RΩ=47.8。
根據實測波形數據,取蓄電池放電階段(2)和階段(3)電壓變化曲線進行曲線擬合,這里采用二維指數擬合,擬合曲線如圖4所示。
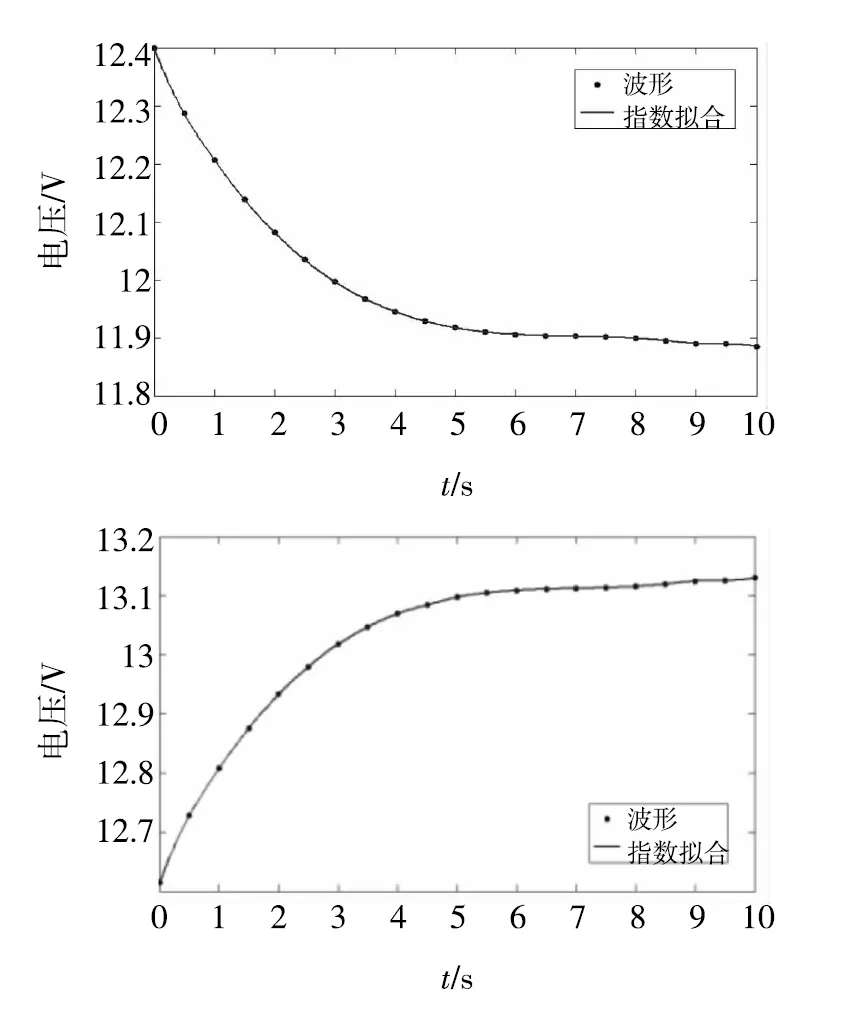
圖4 模型放電擬和曲線
從圖4中可以看出蓄電池極化電壓近似按指數函數規律減少或增加,正好與RC電路放電近似指數變化規律是相似的,故電池等效模型由RC表示是合理的。曲線擬合關系如式(6)和式(7)。
f1(x)=a1eb1x+c1ed1x
(6)
f2(x)=a2eb2x+c2ed2x
(7)
式中a1=0.564 5,b1=-0.448 1,c1=11.84,d1= 4.127e-5,a2=13.18,b2=-3.676e-4,c2=-0.563 4,d2=-0.448 8結合式(3)和式(5)可得蓄電池放電模型中各個物理量參數:R1=24 mΩ,C1=
60.2 F,R2=0.3 mΩ,C2=9 F。
2 充電控制器
2.1 傳統充電控制器
傳統單-雙閉環PI控制方法控制框圖如圖5所示,第一階段恒流充電通過電流單閉環控制來實現,在第二階段恒壓充電模式和第三階段浮充充電模式時,充電器通過控制輸出電壓來調節輸出電流,故需要電壓外環電流內環級聯控制結構。
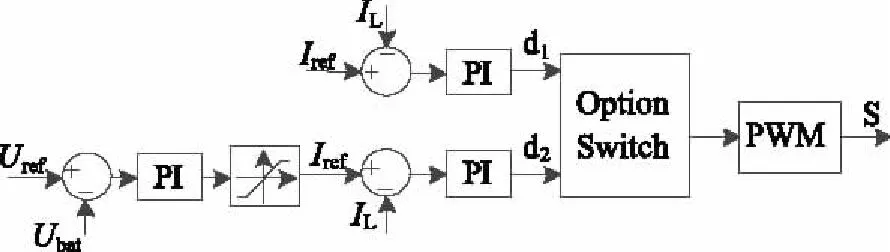
圖5 傳統充電控制器控制框圖
2.2 基于電流預測控制的充電控制器設計
2.2.1 電壓外環控制環路設計
通常情況下,電池在充電過程中其端電壓變化緩慢,同時為了避免電壓外環與電流內環之間相互干擾,電壓外環的帶寬應遠小于電流內環帶寬。因此,在設計電壓外環時,將內環近似等效為一階慣性環節,即:
(8)
式中Tr為電流內環等效時間常數,這里Tr=2e-4s。由于控制量均為直流量故采用PI控制器,電壓外環開環傳遞函數為:
(9)
式中Kp2、Ki2分別為電壓外環控制參數,根據閉環傳遞函數和主導極點的思想可計算出恒壓充電控制器控制參數為:Kp2=0.1,Ki2=50。
2.2.2 內環電流預測控制器設計
在傳統電壓外環、電流內環的基礎上,以電流預測控制器來替代電流內環,具體設計思路如下:
建立蓄電池充電電路等效模型,如圖6所示。當系統工作在充電模式時,Ubus通過功率變換器給蓄電池組供電,穩定情況下,C1上的電壓Ubus也是恒定的,所以Cbus對功率變換沒影響,所以在建立蓄電池充電模式等效電路時可以不計母線電容Cbus,圖中Ts表示開關管開關周期。
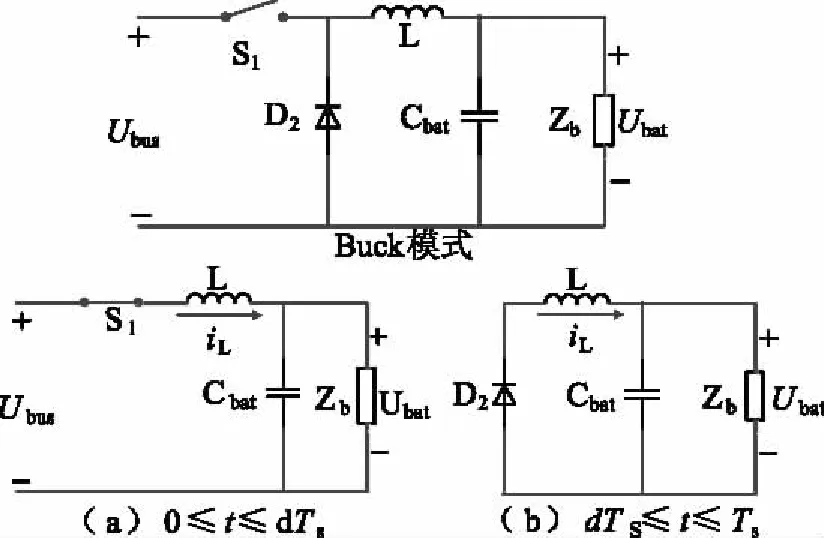
圖6 Buck模式等效電路
由圖6可知,當雙向DC-DC變換器工作在Buck模式開關管S1導通時,其電壓方程為:
(10)
開關管S1關斷時,其電壓方程為:
(11)
將式(8)和式(9)離散化,離散化步長為T,則可得:
(12)
(13)
假定Buck變換器在一個開關周期內,開通占空比為d,式(12)等以d與式(13)乘以(1-d)兩式相加得:
(14)
由式(14)可得Buck變換器在一個PWM周期開通的占空比d為:

(15)
(16)
綜合以上分析,基于電流預測控制的蓄電池充電控制框圖如圖7所示。當蓄電池進行恒流充電時電壓外環飽和,輸出限副,此時充電器輸出恒定電流。當蓄電池進行恒壓充電和浮充充電時電壓外環退出飽和狀態,此時充電器通過控制輸出電壓來調節輸出電流。由式(16)可知:采用電流預測控制減少了對控制參數的設計與計算,避免了充電切換過程中由于控制參數的改變造成充電電流斷續的情況,蓄電池充電電路輸出電流可以在下一周期快速達到給定電流,實現無差拍跟蹤。因此該方法有很好的控制性能。
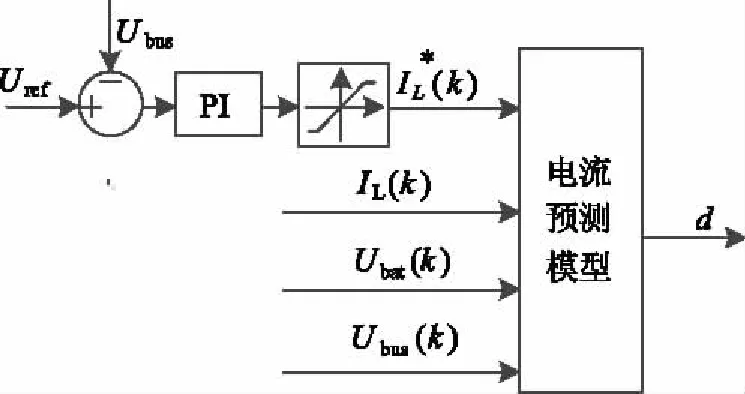
圖7 基于電流預測控制的蓄電池充電控制策略
3 仿真及實驗結果分析
3.1 仿真驗證
根據控制器的設計對蓄電池充電系統進行仿真分析。圖8為充電電流階躍響應仿真波形,從圖中可以看出啟動充電電流沒有超調量且穩態誤差為零。圖9為充電階段切換仿真波形,從仿真結果可以看出在切換點前后恒流和恒壓兩個階段控制穩定,在切換點處過渡平滑,充電電流連續,滿足預期效果。
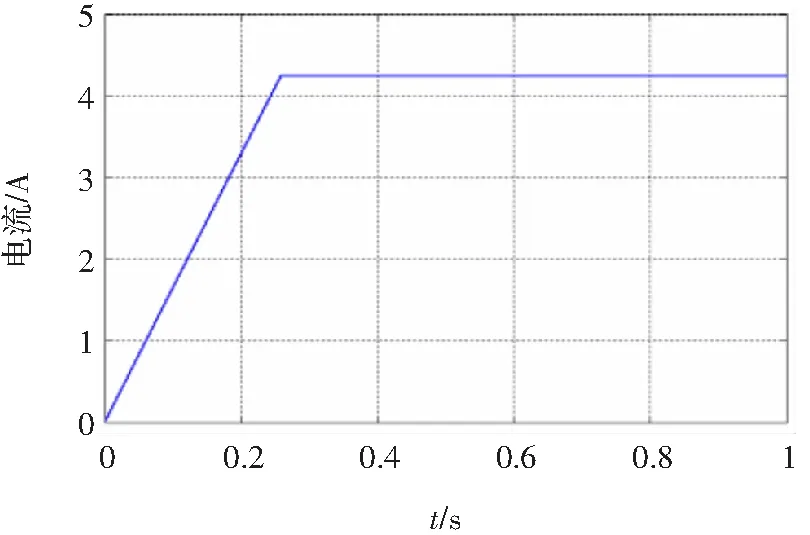
圖8 充電電流階躍響應仿真波形
3.2 實驗驗證
為進一步驗證上述理論分析結果,按照表1所示系統參數搭建蓄電池充電平臺。充電系統采用直流電源供電,充電對象選用膠體鉛酸蓄電池,額定電壓12 V,額定容量17 Ah。根據相關標準確定蓄電池恒流充電電流和恒壓充電電壓,在恒流充電階段充電電流為2.55 A,蓄電池端電壓增大到14.4 V后,進入恒壓充電階段,充電電壓穩定在14.4 V充電電流由2.55 A逐漸減小。
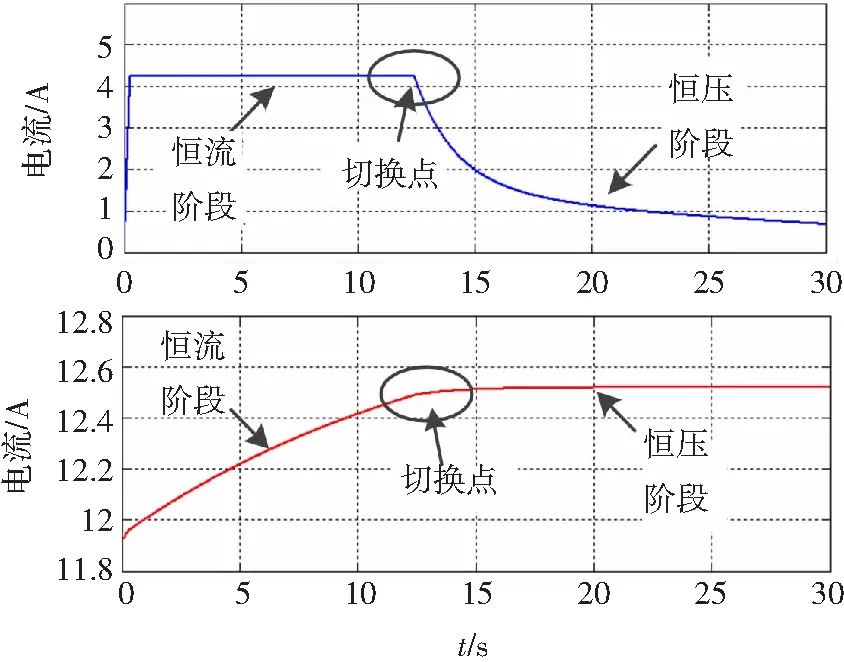
圖9 充電階段切換仿真波形
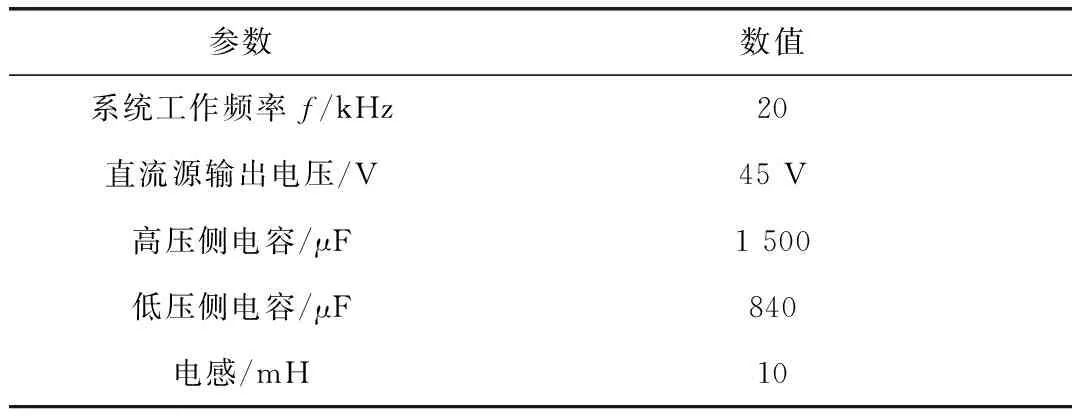
參數數值系統工作頻率f/kHz20直流源輸出電壓/V45 V高壓側電容/μF1 500低壓側電容/μF840電感/mH10
圖10所示為恒流充電模式時充電電流Ib啟動和穩態實驗波形,從實驗波形可以看出充電電流啟動超調量極小,而且穩定后穩流精度可以達到0.7%滿足蓄電池充電要求。
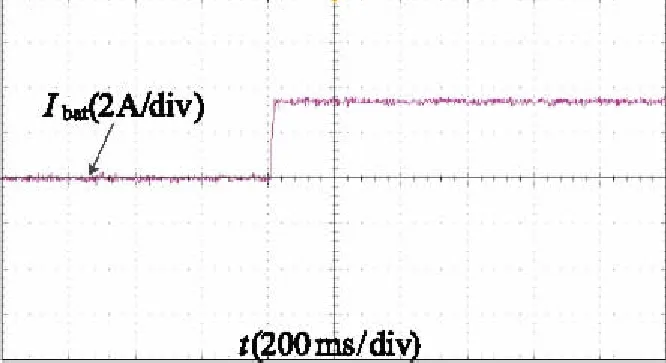
圖10 恒流充電啟動實驗波形
圖11所示為蓄電池恒流充電切換到恒壓充電時的充電電壓和充電電流實驗波形,從圖中可以看出在切換點前充電電流(2.55 A)基本不變,充電電壓逐漸增大,當蓄電池端電壓達到切換電壓(14.4 V)時,充電器由恒流充電模式轉換為恒壓充電模式,此時充電電壓(14.4 V)保持不變充電電流逐漸減小。在切換點處充電電壓和充電電流過度平滑切換并沒有出現斷續震蕩的情況,滿足預期設計目標和實際蓄電池充電要求。
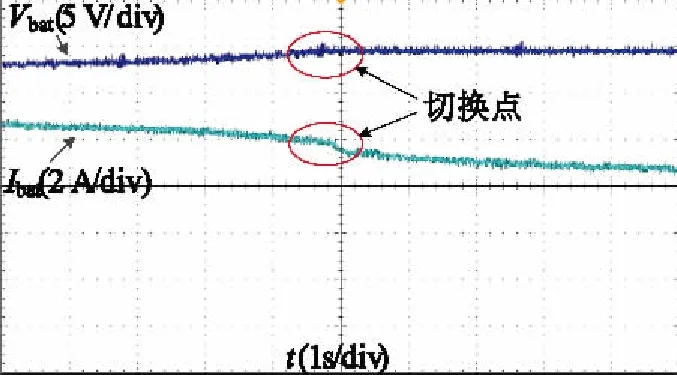
圖11 恒流充電到恒壓充電切換波形
4 結束語
在傳統單-雙閉環PI控制的基礎上,提出了一種基于電流預測控制的蓄電池充電控制策略,用電流預測控制器來取代傳統單-雙閉環PI控制器中的電流環,通過理論分析和實驗驗證可以得到以下結論:
(1)電流預測控制與傳統PI控制方法相比較,提高了系統的動態性能更適合于蓄電池充電系統;
(2)采用電流預測控制器來取代電流內環,減少了對控制參數的設計與計算,避免了充電切換過程中由于控制參數的改變造成充電電流斷續的情況;
(3)通過在硬件電路實現基于電流預測控制的蓄電池充電策略,證明了該控制方法的有效性和實用價值。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
