一種電動汽車驅動防滑控制方法
2018-12-23 06:46:12蘭華李蘭
科技與創新 2018年1期
關鍵詞:控制策略
蘭華,李蘭
(太原理工大學,山西 太原 030012)
一種電動汽車驅動防滑控制方法
蘭華,李蘭
(太原理工大學,山西 太原 030012)
為了保證電動汽車在直線加速行駛狀態下的驅動性能及車輛行駛安全性,提出了一種驅動防滑牽引力控制方法,分析了輪胎縱向附著系數與縱向滑轉率的關系曲線,以使輪胎保持穩定附著為控制目標,基于期望滑轉率值給出了動力輸出切斷的驅動防滑控制策略。仿真結果表明,采用驅動防滑控制后,輪胎打滑得以避免,車輛獲得更好的加速特性,驅動防滑控制有效改善了車輛的驅動性能。
電動汽車;滑轉率;牽引力控制;燃油汽車
目前,為了應對能源和環境危機,新能源技術受到了日益廣泛的關注。而電動汽車作為新能源領域的重要組成部分,其技術的發展和進步具有重要的時代意義。與傳統的燃油汽車相同,電動汽車牽引力控制用以改善車輛的驅動性能,提升車輛行駛安全性。本文以驅動電機能夠直接控制輸出轉矩的特點為基礎,討論了一種可用于電動汽車的驅動防滑控制方法。
1 驅動防滑控制策略
基于前輪單橋臂電機驅動結構形式的汽車,在直行加速情況下,車輛的側向速度和橫擺角速度均為0,此時,車輛動力學方程可表示為:

式(1)(2)中:m為整車質量,u為車輛的縱向速度,Fx1和Fx2分別表示地面作用于左、右前輪的縱向力,J為輪胎轉動慣量,w1和w2為左、右輪胎轉速,Tm為驅動電機輸出轉矩,為總傳動比,η為傳動效率,R為輪胎半徑,Fz1和Fz2為左、右輪胎的垂直載荷,f為輪胎滾阻系數。
車輛輪胎所獲得的縱向驅動力和其縱向滑轉率滿足一定的對應關系,路面附著系數μ與滑轉率S關系曲線如圖1所示。由圖1可以看出,當有驅動轉矩作用于輪胎使其產生滑轉后,路面附著系數首先隨滑轉率的增加而增大至最大值,進而開始隨滑轉率的提升而減小。當輪胎規格與路面類型一定時,存在一個最優滑轉率,使得當前路面附著系數為最大,即輪胎獲得最大的縱向驅動力。該最優滑轉率值將μ-S曲線劃分為左、右兩部分,左半部分為穩定附著區,右半部分則反映輪胎發生打滑。
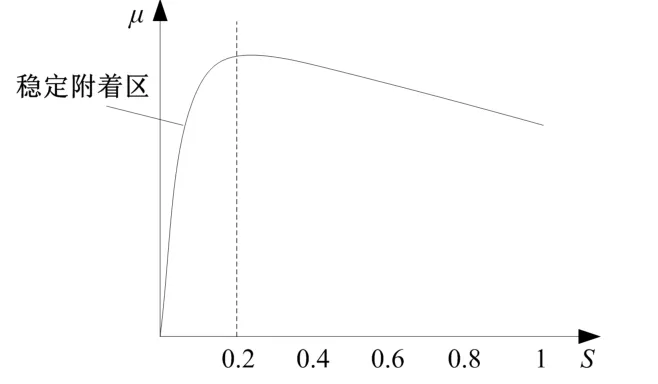
圖1 路面附著系數與滑轉率關系曲線
當駕駛員通過加速踏板給定較大加速意圖時,由于電機轉矩輸出過大,很容易造成輪胎打滑,即進入μ-S曲線右半部分狀態。此時對于車輛而言,一方面輪胎磨損加劇;另一方面,加速性能下降,不論從經濟性還是安全性上看,都應當盡量避免這種工況出現。
為了引入驅動防滑控制,通過動力輸出切斷來限制驅動轉矩的過度輸出,可以有效防止輪胎打滑,為車輛提供最優驅動性能。驅動防滑控制策略為:

式(3)中:S0為預先設定的最優滑轉率值,為駕駛員的操作給定轉矩,S1和S2分別表示左前輪和右前輪兩個驅動輪的滑轉率。
由此可見,驅動防滑控制策略要求先計算兩個驅動輪當前的滑轉率值,再與設定的最優滑轉率進行比較。當某一輪胎的滑轉率大于最優滑轉率時,認為輪胎發生打滑。此時,切斷電機的轉矩輸出。當驅動輪的滑轉率均在穩定附著區時,電機按照駕駛員的操作意圖輸出相應轉矩。驅動輪實時滑轉率按上述公式計算,其中,輪胎轉速ω1和ω2可由轉速傳感器測量得到,車輛的縱向速度u可根據從動輪的轉速按照u=ωR計算得到。驅動防滑控制策略的控制流程如圖2所示。
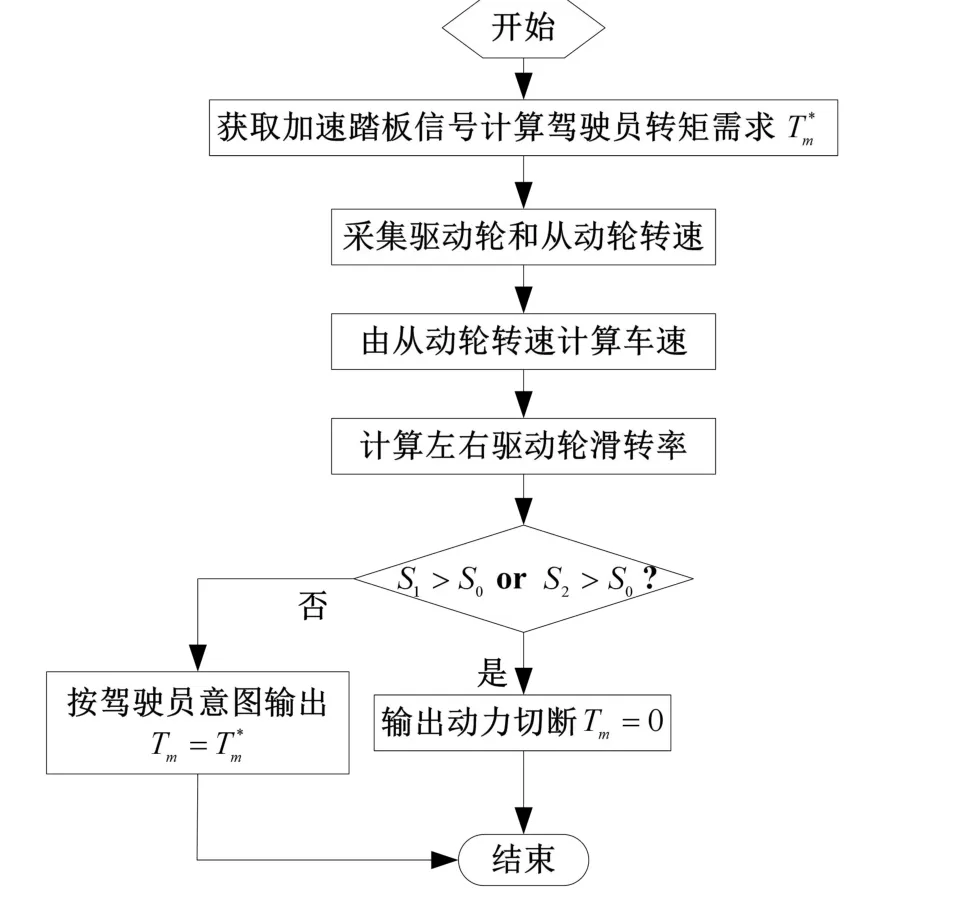
圖2 驅動防滑控制策略的控制流程圖
2 仿真結果
為了驗證所討論的驅動防滑控制策略,在Matlab Simulink環境中搭建了車輛及控制策略的仿真模型。仿真模型選取表1中的車輛參數,車輛輪胎力由魔術公式計算得到。
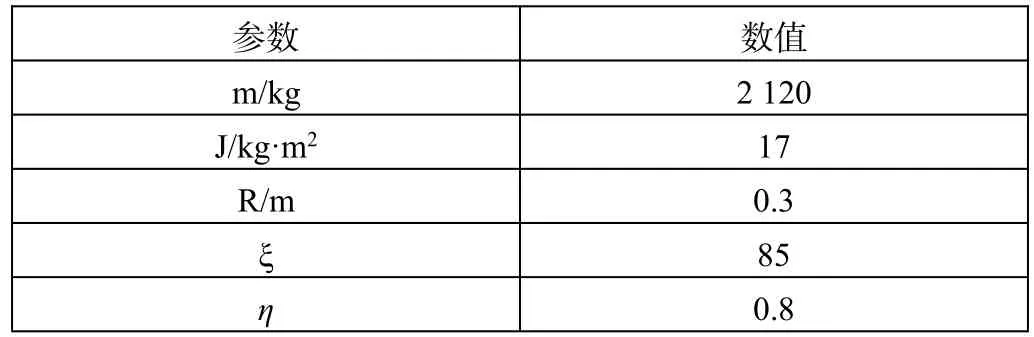
表1 仿真模型參數
仿真中選擇最優滑轉率S0=0.2,設定由駕駛員操作輸入的加速轉矩=30 N·m,采用式(3)中描述的驅動防滑控制策略,仿真得到驅動輪的滑轉率如圖3所示,電機驅動轉矩輸出如圖4所示。為了評估驅動防滑控制對車輛驅動性能的改善效果,對在相同條件下未施加驅動防滑控制的車輛進行仿真,得到驅動輪的滑轉率如圖5所示,兩種條件下仿真得到的車速變化情況如圖6所示。
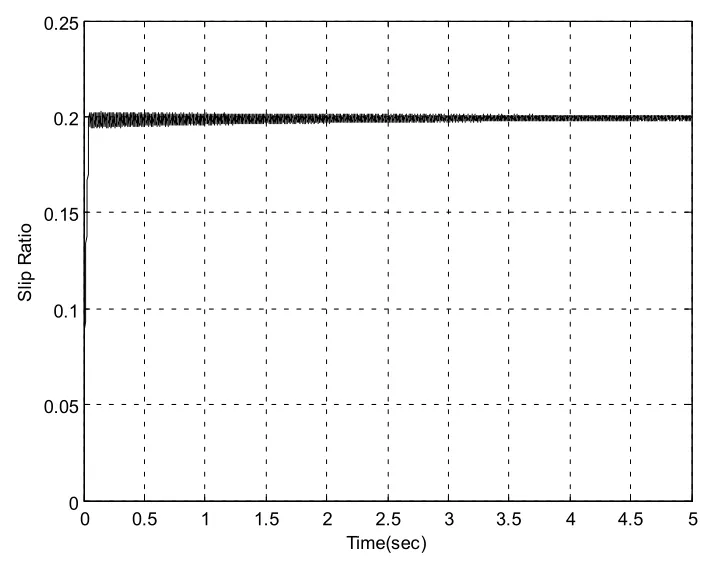
圖3 采用驅動防滑控制策略的驅動輪滑轉率
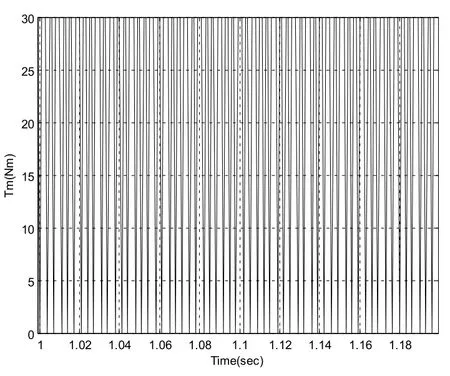
圖4 驅動防滑控制轉矩輸出
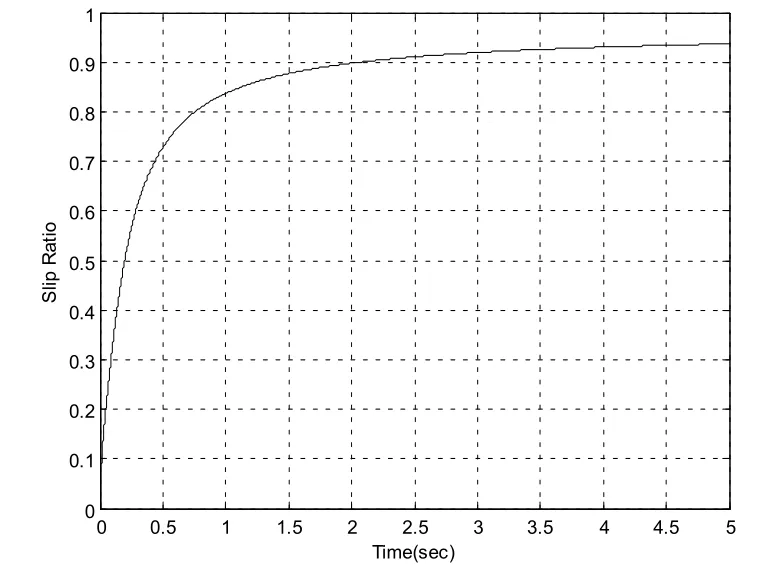
圖5 未采用驅動防滑控制策略的驅動輪滑轉率

圖6 加速性能對比
由圖3可以看出,采用驅動防滑控制后,車輛驅動輪的滑轉率穩定在預設的最優值0.2附近,輪胎未發生打滑現象,由圖4可以看到根據驅動防滑控制產生的輸出動力切斷情況。由圖5可以看出,在未施加驅動防滑控制的情況下,驅動輪的滑轉率迅速增大,超過了穩定附著的界限,輪胎進入打滑狀態。圖6顯示了兩種情況下車輛加速效果的明顯差異。仿真結果表明,采用驅動防滑控制后,車輛的驅動性能得到了明顯提升。
3 結論
車輛直線加速行駛時,如果駕駛員給定的驅動轉矩過大,可能使輪胎發生打滑,導致驅動性能和車輛安全性降低。引入驅動防滑控制策略,根據驅動輪的實時滑轉率,在輪胎即將發生打滑時切斷車輛的驅動動力輸出,可以有效避免輪胎打滑的發生,有效改善了車輛的驅動性能。
[1]郭孔輝,王德平.汽車驅動防滑控制理論的初步研究[J].吉林工業大學學報,1997,27(03).
[2]續丹,王國棟,曹秉剛,等.獨立驅動電動汽車的轉矩優化分配策略研究[J].西安交通大學學報,2012,46(03).
[3]N.Mutoh.Driving and braking torque distribution methods for front-and rear-wheel-independent drive-type electric vehicles on roads with low friction coefficient.IEEE Transactions on Industrial Electronics,2012,59(10).
[4]范晶晶,羅禹貢,張弦,等.多軸獨立電驅動車輛驅動力的協調控制[J].清華大學學報(自然科學版),2011,51(04).
TP275
A
10.15913/j.cnki.kjycx.2018.01.085
2095-6835(2018)01-0085-03
蘭華(1960—),女,四川瀘縣人,高級實驗師,畢業于山西礦業學院機械制造專業,現在太原理工大學機械工程學院從事教學實驗工作。
〔編輯:張思楠〕
猜你喜歡
艦船科學技術(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
山東工業技術(2016年15期)2016-12-01 05:31:37
通信電源技術(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(2016年5期)2016-03-22 01:09:38
電機與控制應用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36