工業機器人在自動化控制中的應用研究
2018-12-23 06:46:14蔡濟云
科技與創新 2018年1期
關鍵詞:作業
蔡濟云
(武漢市第十一中學,湖北 武漢 420100)
工業機器人在自動化控制中的應用研究
蔡濟云
(武漢市第十一中學,湖北 武漢 420100)
工業機器人需要用到多種技術,包括計算機技術、自動控制技術、傳感器技術等。另外,近年來人工智能技術也得到了廣泛運用。工業機器人的一個重要特征是可以長期長時間地進行單調、重復的體力勞動,可以替代很多人工作業。鑒于工業機器人在自動化控制領域有著廣泛的應用,對工業機器人在自動化控制中的應用進行了相關研究。
工業機器人;自動化控制;運動控制;示教再現
1 我國工業機器人發展現狀
我國工業機器人跟國外相比差距較大,這跟我國工業機器人起步較晚有一些關系。目前,我國在工業機器人方面獲得了技術上的突破,但是很多核心技術并沒有掌握,真正擁有我國知識產權的工業機器人其實并不多。總體來看,我國工業機器人技術水平普遍不高。具體而言,在制造裝備方面,我國生產高精密部件的水平在世界上不占據優勢。我國在數控機床關鍵技術與裝備和裝配自動化機器人、隧道掘進機器人等方面獲得了較大的突破。但這些突破跟國外一些發達國家比較,差距還是較大的,值得我國重視。圖1所示為某企業生產的工業機器人。
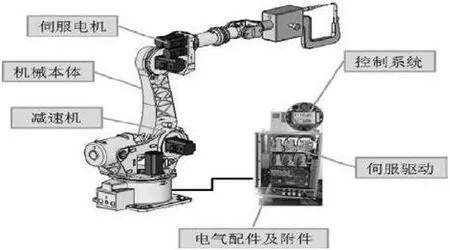
圖1 某企業生產的工業機器人
2 在自動化控制系統中特點與功能
2.1 工業機器人在自動化控制系統中的特點
所謂“工業機器人”,就是在工業領域應用的多關節機械手或多自由度的機器裝置。通常情況下,工業機器人需要3個左右的自由度,在復雜的機器人中,往往需要多個自由度。在工業機器人的每個自由度中,可以將自由度組成多變量的控制系統。在多個坐標下,工業機器人實現手足狀態的描述,從而實現坐標變換。通過對工業機器人的控制系統進行分析,發現其與動力學和機構運動學是密不可分的。為了實現工業機器人根據人的意志去執行各項操作,就需要通過計算機對其進行控制。在此過程中,需要借助非線性數學模型來實現,通過該模型,設置模型參數,使工業機器人的運動狀態發生各種改變。需要注意的是,工業機器人可以通過最優路徑來實現各種動作的操作。另外,對于高級工業機器人而言,如果能夠借助計算機構建信息庫,那么就能夠更好地對工業機器人進行控制和執行各種操作。
2.2 工業機器人在自動化控制系統中的功能
一個工業機器人往往功能較多,但是運動控制功能和示教再現是其中最為顯著的2種功能。通過運動控制系統,可以使工業機器人操作器的速度和位置、姿態發生改變;通過示教再現這個功能,把動作信息和操作位置等信息傳達給機器人,機器人借助記憶系統,可以將這些信息進行存儲。當機器人下一次接到指令的時候,就可以根據已記憶存儲的內容自動進行各種操作。在汽車制造行業中,工業機器人首先得到了應用。當科技和經濟進一步發展之后,工業機器人的應用領域越來越廣泛,不僅可以代替人工進行高溫和高危環境的作業,還可以代替工人進行重復性高、體力消耗量的作業。工業機器人在社會生產中的廣泛應用,不僅能夠避免工人發生安全問題,還能夠使企業的生產效率大大提升。由于工業機器人的優點較多,其在很多自動化生產領域都能夠充分發揮自身的作用。比如,焊接機器人、檢測機器人、搬運機器人、噴漆和噴涂機器人、裝配機器人就是工業機器人在自動化生產中的典型應用。其中,焊接機器人主要用于對車身結果進行焊接;檢測機器人能夠對零部件的尺寸進行確定,對零部件的質量進行把握,有的甚至還能夠對零部件實現自動分類,大大降低了工人的工作量;材料搬運機器人在搬運工作中起著重要作用,不僅能夠裝貨和卸貨,還能夠抓取零件、堆垛等;噴漆和噴涂機器人自由度的數量往往要大于5,這是由這種作業對機器人的動作要求所決定的。另外,有時候為了使機器人實現定向行走,往往通過導軌來對工業機器人進行行走軌跡引導。裝配機器人由于具有聽覺傳感器、視覺傳感器、觸覺傳感器等多個傳感器,所以能夠使裝配工作得到順利開展。
3 工業機器人在自動化控制中的發展展望
我國在工業機器人方面提出了發展戰略目標,也就是根據我國先進制造及其自動化的要求,向發達國家高技術創新方向前進,努力研發更高水平的工業機器人,并且在產品技術和系統技術方面獲得重大突破。在不久的將來,工業機器人主要的發展重點包括以下3個方面:①危險作業環境下的機器人,主要負責高溫、高壓環境下的作業,油氣管道的檢測等。②在醫學領域,工業機器人的運用也是非常值得期待的。很多腦外科手術、骨骼的矯正手術,如果僅僅靠手術醫生,很難做到手術的精細化,因為人工總是有誤差的,而機器人就能夠將手術做得更加精細。③仿生機器人。這種機器人能夠模擬人行走,通過網絡對設備進行遙控。總而言之,未來我國工業機器人的總體發展趨勢是:更加智能化、更加低成本、更加可靠、更加集成化。
4 結論
在經濟和科學技術飛速發展的今天,工業機器人在技術方面和功能方面都得到了較大的提升,已經能夠實現較為復雜的自動化控制。在工業自動化程度不斷提高的背景下,工業機器人必將得到越來越廣泛的應用,為社會生產活動帶來更多便利。
[1]郁晗.工業機器人的應用和發展趨勢[J].電子世界,2014(10):370-371.
[2]孫英飛,羅愛華.我國工業機器人發展研究[J].科學技術與工程,2012,12(12):2912-2918.
[3]柳倩,桂建軍,楊小薇,等.工業機器人傳感控制技術研究現狀及發展態勢——基于專利文獻計量分析視角[J].機器人,2016,3(5):612-620.
TP242.2
A
10.15913/j.cnki.kjycx.2018.01.144
2095-6835(2018)01-0144-02
〔編輯:劉曉芳〕
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08