無人駕駛車GPS自主導(dǎo)航與障礙規(guī)避系統(tǒng)設(shè)計與實現(xiàn)
2019-01-02 05:43:48方海洋趙瑞妮涂市委
汽車實用技術(shù) 2018年24期
方海洋,趙瑞妮,涂市委
?
無人駕駛車GPS自主導(dǎo)航與障礙規(guī)避系統(tǒng)設(shè)計與實現(xiàn)
方海洋,趙瑞妮,涂市委
(長安大學汽車學院,陜西 西安 710064)
提出一種基于Trimble BD982定位傳感器和ZED雙目視覺傳感器的無人車GPS自主導(dǎo)航與障礙規(guī)避系統(tǒng)設(shè)計與實現(xiàn)方案。利用RTK-GPS系統(tǒng)進行高精度定位,當ZED雙目相機檢測前方出現(xiàn)出現(xiàn)正負障礙物時,借助于ZED建立的三維障礙物模型對原來GPS采集的路網(wǎng)文件中的一部分路段進行點位整體偏移建立局部GPS路網(wǎng),最終將局部GPS路網(wǎng)與整體GPS路網(wǎng)融合實現(xiàn)無人駕駛車GPS自主導(dǎo)航。
BD982;雙目視覺傳感器;RTK-GPS;路網(wǎng)融合
1 概述
本文所研究的無人駕駛車是基于高精度GPS定位系統(tǒng)實現(xiàn)自主導(dǎo)航,配合ZED雙目相機進行避障。由人工操作無人駕駛車提前進行GPS點位的采集,利用NURBS曲線插值法構(gòu)建車輛運行的二維軌跡路徑。車輛的自主駕駛運行過程中采用NURBS曲線算法中尋找最近點的方法,實時尋找車輛運行的目標點,結(jié)合車輛的航向角計算出車輛所需的舵量以及適宜速度,利用中值濾波方法處理數(shù)據(jù)后,實時控制車輛線控系統(tǒng),從而讓無人駕駛車沿著該軌跡運行。在行進的過程中當ZED雙目相機檢測到前方出現(xiàn)障礙物或坑洼時,制作局部GPS路網(wǎng),并且根據(jù)車輛航向角和路網(wǎng)信息進行局部GPS路網(wǎng)和整體路網(wǎng)的融合。
2 高精度GPS地圖
2.1 GPS點位采集
本文采取載波相位差技術(shù)獲得無人車的準確位置,將BD982采集的WGS-84坐標通過高斯投影轉(zhuǎn)換為平面坐標。

圖1 系統(tǒng)整體工作流程圖

圖2 高斯坐標投影原理圖
高斯投影后轉(zhuǎn)換的平面坐標系是以是以子午線與赤道的交點為原點,x軸為中央子午線的投影,y軸為赤道的投影,大地坐標點(B,L)經(jīng)高斯投影轉(zhuǎn)換后的平面坐標(x,y)如下:

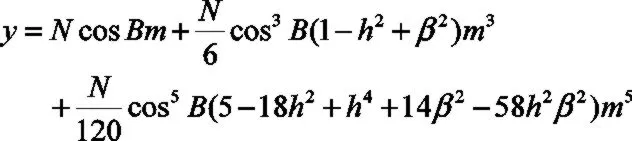
式中D是指赤道至緯度B的子午線弧長,N為卯酉圈曲率半徑,為橢球的長軸半徑。
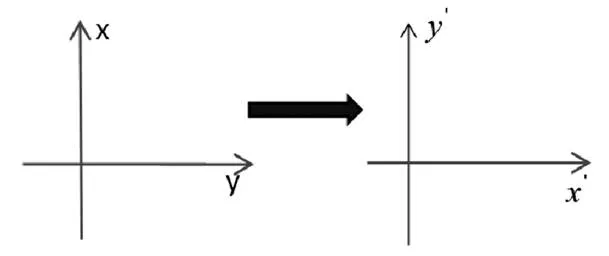
圖3 坐標系轉(zhuǎn)換
通過高斯投影變換后的坐標系x軸指向正北方,y軸指向正東方,不符合操作習慣,所以將坐標系進行矩陣變換如下:

2.2 路網(wǎng)制作
在本文中我們利用NURBS曲線插值法將離散的點位數(shù)據(jù)處理成平滑的曲線:
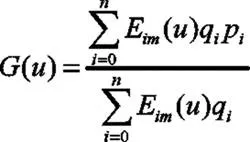
式中E()是m階B樣條基函數(shù),q是權(quán)重因子,p是控制點。基函數(shù)E()通常由遞推公式定義如下:


2.3 無人駕駛GPS導(dǎo)航算法
根據(jù)實際道路情況在軟件中提前設(shè)定打舵參考行n,相當于選取距離車輛一定距離的GPS點位作為車輛打舵的目標點。
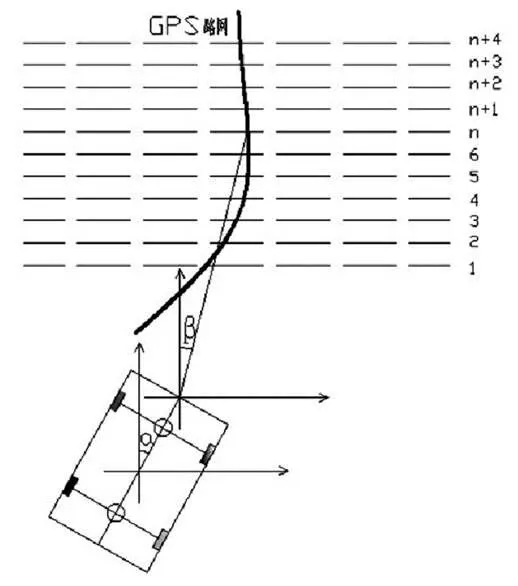
圖4 GPS導(dǎo)航示意圖
車輛前后自身安裝了2個GPS天線,根據(jù)這兩個天線位置計算出車輛與參考行GPS點位的連線與地球正北的夾角為:

由和車輛的航向角可以求得打舵角度為:

式中n為倍率系數(shù)。
對打舵角度進行中值濾波處理:

計算機將打舵角度δ發(fā)送給下位機,計算出車輛打舵的信號電壓二次多項式為:

無人駕駛車速度的控制采用設(shè)定一個和,反復(fù)試驗確定車速和打舵角度△θ之間的關(guān)系如下:

3 避障控制策略
3.1 障礙物建模
為了配合GPS導(dǎo)航,需要將障礙物的相機坐標系轉(zhuǎn)化為世界坐標系。

式中Xw代表世界坐標系,代cmn表旋轉(zhuǎn)矩陣,Xc代表相機坐標系,Dx代表平移矩陣。相機坐標系向世界坐標系的轉(zhuǎn)換過程可視為坐標系先繞Z軸旋轉(zhuǎn),然后繞Y軸旋轉(zhuǎn),最后繞X軸旋轉(zhuǎn)的過程,但最終還需要做出適當平移達到相互統(tǒng)一。
繞Z軸、Y軸、X軸旋轉(zhuǎn)即等同于將原來的坐標矩陣經(jīng)過三次矩陣旋轉(zhuǎn)變換,三個旋轉(zhuǎn)矩陣按照順序如下:

無人車主要行駛在平坦道路,所以可認為車輛的俯仰角和側(cè)傾角為0,即=90°,=90°。此時車輛的航向角為,當<90°,=90°-,即旋轉(zhuǎn)矩陣為=321。
3.2 局部GPS路網(wǎng)重建
當ZED雙目相機探測到前方出現(xiàn)障礙物時,本文采用兩步判斷法進行路網(wǎng)重建。首先基于可通過性判斷,當障礙物的一側(cè)仍然存在其他障礙物或坑洼,排除從該側(cè)避障的可能性;其次從左右側(cè)避障的路徑長度來判斷,分別計算車輛與左右角點的距離為d,d為:

當d-d≥3時選擇從右側(cè)避障;當d-d>3時選擇從左側(cè)避障。
本論文按照障礙物橫向輪廓線方向平移,將靠近車輛一側(cè)的離散點位用最小二乘法回歸:

假設(shè)車輛從右側(cè)避障,由二次回歸直線的斜率可以求得直線與大地坐標系X軸正向的角度為:

計算GPS路網(wǎng)與障礙物第一個交點為(4,4),根據(jù)該交點與右側(cè)角點(R,R)的距離計算向右偏移距離4。

偏移后點的坐標1為:
當車輛行駛至右側(cè)1點時,如果車輛的航向偏向右方,由于ZED雙目相機水平視場角有限,所以可能捕捉不到障礙物,因此必須預(yù)先按照障礙物右側(cè)邊緣與前側(cè)邊緣垂直的假設(shè)情形來偏移一段距離的GPS點位。系統(tǒng)遍歷E點之后50個GPS點位信息,并向右按照與當前航向垂直方向?qū)ふ艺系K物右邊緣點坐標,計算每個GPS點位所需要偏移的距離d為:

當車輛通過1在障礙物右側(cè)的行進過程中,當雙目相機拍攝到障礙物的圖像時,按照上文提到的方法對障礙物建模,利用坐標系轉(zhuǎn)換求出該段所有GPS點位的平移距離,然后計算出更新后的GPS點位。如果障礙物在路徑方向的距離很長,ZED相機無法捕捉全景,所以要對障礙物的模型進行更新。考慮到車速和計算機性能,我們將障礙物模型個更新頻率設(shè)置為1HZ。采用算術(shù)平均值濾波方法對大量離散的GPS坐標數(shù)據(jù)進行濾波處理,具體做法是:選取若干個樣本框,對各個樣本框里點位的橫縱坐標進行平均后得到一個新的坐標。單個樣本框的確定取決于點位的數(shù)量,當GPS點位達到預(yù)設(shè)數(shù)量時就形成了一個樣本框。樣本框自身的個數(shù)由雙目相機前方的盲區(qū)區(qū)域大小確定,因為無法對盲區(qū)建模,所以不會有新的離散數(shù)據(jù)干擾濾波。在車輛前進時,盲區(qū)不斷向前擴展,系統(tǒng)根據(jù)新增的GPS點位生成樣本框,然后對樣本框的數(shù)據(jù)進行算術(shù)平均值濾波處理。

在車輛前進的過程中,當雙目相機檢測到前方?jīng)]有障礙物時,可能障礙物右側(cè)邊緣線向左側(cè)偏移,還有可能車輛已經(jīng)通過障礙物區(qū)域。首先我們需要確定車輛是否通過障礙物,具體做法是:選取一個適宜的△,將此時車輛航向角由調(diào)整為△,使車輛向左側(cè)行駛,可以增大雙目相機左側(cè)的視場。將原來的坐標系順時針旋轉(zhuǎn),相當于GPS點位逆時針旋轉(zhuǎn),車輛航向向左側(cè)偏移。

當車輛向左側(cè)偏移后,雙目相機檢測到障礙物邊緣后,按照上述方法繼續(xù)建模,GPS偏移。如果車輛向左偏移后仍無法檢測到障礙物,此時系統(tǒng)認為車輛已經(jīng)通過障礙物區(qū)域。
3.3 局部GPS路網(wǎng)和全局GPS路網(wǎng)的融合
首先根據(jù)偏移距離d確定車輛在距離E點d時就開始離開全局GPS路網(wǎng)(d正相關(guān)于d)。根據(jù)距離d遍歷E點之前的點位,尋找離開點F,統(tǒng)計F點和E點之間的GPS點位個數(shù)為n,假設(shè)第一個點位的偏移量為0.05m,按照等比數(shù)列設(shè)計其他點位的偏移量,等比數(shù)列的比例系數(shù)q為:

根據(jù)該比例系數(shù)計算每一個點位的偏移距離d,計算所有點位的偏移距離d=0.05(m-1),然后再次使用NURBS曲線插值法構(gòu)造該段路網(wǎng)曲線,通過障礙物之后的局部GPS路網(wǎng)偏移方法與此相同。
[1] 李陸浩,面向無人駕駛汽車的車道級導(dǎo)航研究[D].吉林大學.2014.
[2] 夏天,智能車速度規(guī)劃及路徑跟蹤控制方法研究[D].北京工業(yè)大學.2017.
[3] 王晨,無人駕駛智能車控制與規(guī)劃系統(tǒng)的設(shè)計與實現(xiàn)[D].上海交通大學.2009.
Design and implementation of GPS and Binocular camera for driverless car
Fang Haiyang, Zhao Ruini, Tu Shiwei
( Automobile College of Chang’an University, Shaanxi Xi’an 710064 )
This paper presents a design and implementation of driverless car based on Trimble BD982 positioning sensor and ZED binocular vision sensor. The difference with RTK-GPS system base station for high precision positioning. When obstacles or eliminate appears in front of the road is detected by ZED binocular camera, With the help of the 3D obstacle model established by ZED, the local GPS road network has been established by the point bit overall migration of some sections of the road network files which were collected by the GPS originally. Finally we integrate the local GPS road network with the overall GPS network to realize the GPS autonomous navigation of the driverless car.
BD982; binocular vision sensor; RTK-GPS; road network fusion
B
1671-7988(2018)24-30-04
U462
B
1671-7988(2018)24-30-04
U462
方海洋,長安大學汽車學院碩士研究生,研究方向:無人駕駛汽車,線控地盤改造,高精度GPS導(dǎo)航。
10.16638/j.cnki.1671-7988.2018.24.009
