無人機遙感在生產建設項目水土保持監測數據獲取中的應用
2019-01-19 06:10:35張琳琳張艷張文謙吳林川高飛
綠色科技 2019年24期
關鍵詞:無人機
張琳琳 張艷 張文謙 吳林川 高飛

摘要:指出了生產建設項目的監測是水土保持監測工作的重要內容,可以及時全面且準確地反映工程的水土保持措施建設情況,水土流失防治效果。為了快速、準確、有效地估算生產建設項目擾動及水土保持措施實施情況,掌握其變化規律,以北京市昌平區的兩個處于施工期的項目為例,通過無人機遙感生成的數字正射影像和三維模型進行水土保持監測數據獲取,獲得了地塊A、地塊B和臨時堆土區的擾動土地面積、水土保持措施實施數量及堆土量,證明了無人機在生產建設項目水土保持監測中應用的可行性和便利性。
關鍵詞:生產建設項目;水土保持監測;無人機
中圖分類號:Q948. 18
文獻標識碼:A
文章編號:1674-9944( 2019) 24-0023-06
1 引言
隨著國家經濟的飛速發展,生產建設項目日益增多,由此產生的水土流失問題日益嚴重[1]。水土保持監測是生產建設項目中必不可少的環節,也是水土保持工作的基礎。如何快速準確的進行水土保持監測,得到有效的數據是現階段水土保持監測需要解決的關鍵性問題之一。無人機遙感技術在自2011年來取得了飛速發展,其具備精度高.時效性強、機動靈活等特點心[2],在各個行業中的應用中取得了一定的效果。將無人機遙感技術應用于水土保持監測具有實踐意義和價值[3]。
以北京市昌平區兩處生產建設項目作為研究對象,使用無人機拍攝兩個地塊和一處堆土區,針對堆土區使用了垂直攝影的攝影方法。通過軟件處理影像獲得正射影像和三維模型[4],對影像處理獲得監測相關數據,驗證了無人機在生產建設項目水土保持監測中應用的可行性和便利性。
2 研究區概況及實驗方法
2.1 研究區概況
所選建設項目位于北京市昌平區,地貌類型屬城市平原區,土壤類型主要為褐土氣候類型為暖溫帶大陸性半濕潤季風氣候,冬季寒冷干燥,夏季高溫多雨。多年平均降雨量550 mm,集中在6~8月份。年平均氣溫為11.8℃,受地貌影響氣溫差異較大,年平均日照時長2685 h。
所選建設項目為相鄰南北兩個地塊(下文用地塊A、地塊B代替)。依據項目的水土保持方案,地塊A和地塊B項目地性質均為F1住宅混合公建用地。建設內容均為住宅、公建及配套商業用房。地塊A總占地9. 51 hm2,地塊B總占地8. 65 hm2,臨時堆土區位于B地塊東側,占地面積1. 25 hm2。
項目于2018年4月初開工,計劃于2020年10月末完工,工期總計31個月。施工時序總體按照基坑開挖一基坑回填一主體建筑一地形塑造一管線、灌溉工程一道路工程一種植土回覆一綠化景觀工程的順序進行。按照項目的施工安排進度表和實地勘察,研究進行時地塊A正處于主體建筑施工期,地塊B處于基坑開挖期。
2.2 無人機影像獲取
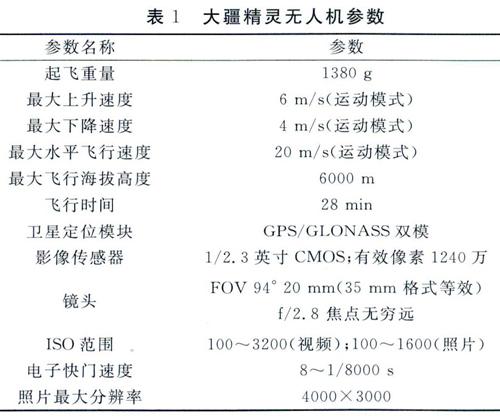
本研究所采用的無人機是大疆Phantom 4,飛機及相機參數見表1。航拍參數設置見表2,航線設置見圖1~3,飛行日期2019年3月2日,氣溫15℃,多云,風力小于三級,適合無人機作業。
2.3 無人機影像數據處理
本次實驗選擇了Agisoftmetashape Professional和ContextCapture Center Master作為影像處理軟件。使用Agisoftmetashape Professional制作兩個地塊和堆土區的的正射影像,三維模型使用ContextCapture CenterMaster制作。
3 結果與分析
3.1 擾動土地面積分析
3.1.1 擾動面積測定
對正射影像進行識別,識別結果地塊A的擾動面積(圖中黃線范圍內部分)為10. 69 hm2,采用手持GPS實測地塊A面積為10. 69 hmz,識圖面積同實測面積相同(圖4)。
根據項目水土保持方案,地塊A的水土流失防治責任范圍面積為9. 57 hm2,擾動土地面積超出防治責任范圍1. 12 hm2,由圖A對比水土保持方案設計防治責任范圍,可直觀發現項目區北側、東側及南側施工臨建發生新增擾動(圖5)。
對正射影像進行測量,識別結果地塊B的擾動面積為8. 42 hm2,采用手持GPS實測面積為8.42 hm2,識圖面積同實測面積相同。
地塊B的水土流失防治責任范圍面積為8. 71hm2,地塊B正處于基坑開挖期,先前設計表土堆土區并未開始實施使用。擾動土地范圍并未超出設計防治責任范圍(圖6、圖7)。
對正射影像進行測量,識別堆土區的擾動面積為1. 25 hm 2,采用手持GPS實測堆土區面積為1.25 hm2(圖8)。
項目區外側的堆土區在水土保持方案中并未設計,均為新增占地。
3.1.2 精準性驗證及合法性分析
由表3可見,圖中提取面積與手持GPS實測面積一致,在單位為公頃的條件下精度可以達到100%,監測過程中地塊A實際發生擾動面積為10.69 hm2,超出了設計的防治責任范圍1. 12 hm2;地塊B實際擾動范圍為8. 42 hm2,在防治責任范圍之內;臨時堆土區在水土保持方案中并未設計,屬于新增臨時用地。需在水土保持監測材料中說明,并向水行政主管部門報備。
3.2 水土保持措施實施情況分析
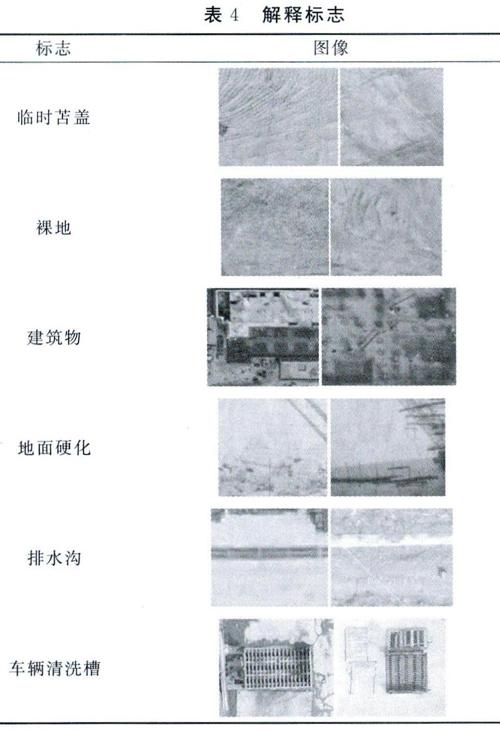
3.2.1 設立遙感的解釋標志
在建立遙感影像解釋標志時,主要根據地物的顏色、形狀、位置、紋理等。并經過實調查分析,確認各地物的解釋標志見表4。
3.2.2 水土保持措施提取
地塊A目前處于主體建筑施工期,通過正射影像,可以識別出現狀實施的水土保持措施有:基坑內的臨時苫蓋及臨時硬化,施工臨時建筑區的地面臨時硬化、臨時排水溝、施工車輛清洗池以及配套沉淀池,項目區地塊外側的臨時攔擋。經過對正射影像的勾畫測量,臨時苫蓋措施面積為27414. 67 m2,覆蓋基坑內大部分裸露地表。基坑內臨時硬化面積為3478. 53 m2,施工臨時建筑區地表全部使用硬化處理,面積為15910. 62 m2,基坑內部及施工臨時建區設置了臨時排水溝,長度分別為1128.26 m、280.92 m。地塊設置了4處施工車輛清洗槽及沉沙池,分別位于地塊北部、南部以及東部上下兩個出口處。同時地塊四周設置有攔擋,長度為1431. 34 m(圖9)。
地塊B已實施的水土保持措施有:臨時苫蓋,臨時排水溝及沉沙池。正射影像的勾畫測量后得出,臨時苫蓋面積64539. 47 m2,臨時排水溝長度943. 42 m,在地塊北部出口設置了一個施工車輛清洗槽,地塊周圍設置有攔擋,總長度1323. 51 m(圖10)。
堆土區主要采取的水土保持措施同樣為臨時苫蓋,面積為9360. 63 m2,同時在堆土區四周設置有排水溝,長度372. 95 m。在堆土區外圍設置一圈臨時攔擋,長度為513. 17 m(圖11、表5)。
3.2.3 水土保持措施提取準確性驗證
同時也進行了現場實地調查測量,選取水土保持措施進行測量,與正射影像提取值對比精度見表6。各項水土保持措施滿足監測規程規定的95%以上準確率[6]。
3.3 臨時堆土區土方量的測定
地塊B東側馬路對面新增臨時堆土區,根據正射影像圖測算其占地面積為1. 25 hm2,堆土區四周有攔擋,攔擋長度為513.17 m。
本研究采用垂直攝影制作堆土區的三維模型。通過Acute3D Viewer測量堆土區域的土方量。垂直攝影生成的三維模型堆土量經測量為44423. 88 m3.土方堆高為4~6 m。根據施工單位所提供數據,堆土區在當天的堆土方量為4. 35萬m3(圖12、表7)。
由于堆土區土方形狀不規則,無法通過傳統手段實測土方量,因此以施工單位所給的土方數據為準。經計算,由垂直攝影生成的三維模型土方量值與實際值相差2676. 12 m3,準確性為94.32%。土方量準確性滿足大于90%[6]的要求。因此在實際水土保持監測中,垂直攝影用于計算堆土區土方量,是完全可行的。
4 討論
通過目視判別、勾繪測量等方式對于無人機遙感生成的數字正射影像和三維模型進行水土保持監測數據獲取。由正射影像獲得了地塊A、地塊B的和臨時堆土區的擾動土地面積并對其進行合規性判別,地塊A實際擾動面積為10. 69 hm2,超出水土保持方案設計防治責任分區1. 12 hm2,地塊B擾動土地面積和范圍均小于防治責任面積,項目外圍新增臨時堆土占地1. 25hHi2。基于正射影像可以有效獲取水土保持措施種類和數量,與實際測量對比精度滿足監測規程95%以上要求。通過三維模型測量了臨時堆土區的土方量,并與實際土方量對比。基于垂直攝影生成的三維模型精度為94. 32%達到了監測規程要求的90%以上,可以作為數據來源。
遙感影像成果中水土保持監測數據提取主要依靠目視識別人機交互。這是由于建設項目施工期數字圖像內容較為復雜,如果交由電腦進行分類識別需進行較多的前期準備工作。人工目視判別與計算機分類技術在大規模尺度上的效率差距較為明顯。單獨的一個或幾個點狀項目水土保持監測使用人機交互判別、勾畫測量工作量還較為適中[7-9]。但對于監管單位來說大量的數據人工目視判別具有較多工作量。可以通過建立和完善建設類項目遙感圖像解釋標志庫,通過機器學習的方式,完成數字化、自動化的遙感圖像數據提取,讓水土保持監測工作更加信息化、高效化。
5 結論
(1)本文根據無人機拍攝影像,通過使用Agisoft-metashape,Context Capture Center Master生成項目區正射影像以及三維模型,得到了地塊A、地塊B及臨時堆土區地面分辨率為0. 05 m的數字正射影像和三維模型,測定生產建設項目擾動面積及水土保持措施實施數量。
(2)通過正射影像可以有效準確地提取出各地塊的擾動土地面積、水土保持措施并判斷其合規性。獲取水土保持措施與實際測量對比,精度滿足監測規程95%以上要求。基于垂直攝影生成的三維模型土方量測量精度為94.32%,證明了無人機在生產建設項目水土保持監測中應用的可行性和便利性。
參考文獻:
[1]蔡志洲,袁普金,王森,空天地一體化水土保持監測初探[J].人民黃河,2018.40(4):92-95.
[2]陳英智,淺談開發建設項目水土保持監測[J].水利天地.2003(11):22.
[3]張德平,王效科,孫宏偉,等.呼倫貝爾沙質草原風蝕坑研究(Ⅳ)——人類活動的影響[J].中國沙漠.2007 ,27(2):214~220.
[4]李凌霄.多旋翼無人機單鏡頭傾斜影像采集關鍵技術研究[D].武漢:長江科學院,2016.
[5]陳宇,付貴增,凌峰,等,無人機技術在水土保持中的應用現狀與展望[J].海河水利.2018(3):61~63.
[6]中華人民共和國水利部.SL 277 - 2002.水土保持監測技術規程[S].北京;中國標準出版社,2002.
[7]史俊鳳.生產建設項目水土保持監測的RS與GIS的應用研究[D].北京:北京林業大學,2016.
[8]孫政,曹永康,基于消費級無人機采集圖像的攝影測量在建筑遺產測繪中的精度評估—一以吉祥多門塔為例[J].建筑遺產,2017(4):120-127.
[9]馬紅斌,周利軍.生產建設項目水土保持監督性監測探討[J].中國水土保持,2018(2):25-26.
收稿日期:2019-11-13
作者簡介:張琳琳(1987-),女,工程師,碩士,主要從事水土保持與荒漠化防治研究。
通訊作者:張艷(1984-),女,工程師,碩士,主要從事水土保持與荒漠化防治研究。
猜你喜歡
電腦知識與技術(2016年28期)2016-12-21 12:21:32
電子技術與軟件工程(2016年19期)2016-12-19 18:28:28
新教育時代·教師版(2016年27期)2016-12-06 18:14:59
中國科技縱橫(2016年17期)2016-11-30 11:51:57
農機使用與維修(2016年10期)2016-11-10 09:45:55
人間(2016年26期)2016-11-03 17:52:40
中國科技博覽(2016年22期)2016-11-01 18:10:31
科技視界(2016年22期)2016-10-18 14:30:27
企業導報(2016年9期)2016-05-26 20:58:26
