
變頻驅動游梁式抽油機自動平衡系統設計
2019-01-30 07:49:16米曉紅
電子技術與軟件工程 2019年1期
文/米曉紅
1 傳統變頻驅動游梁式抽油機平衡調節的現狀及問題
游梁式抽油機在采油生產中大量使用,為了節能采用了變頻驅動,目前變頻驅動游梁式抽油機平衡調節方法為:
(1)首先把抽油機由變頻驅動轉換至工頻驅動狀態。
(2)人工在工頻驅動狀態下采集功圖、電流圖數據、功率圖數據。
(3)人工根據設定算法(電流法或功率法)計算平衡度,計算方法為:一個沖程周期中,下沖程中電機的最大工作電流(功率)與上沖程中電機的最大工作電流(功率)的百分比。
(4)人工判斷平衡狀態:平衡度在設定的范圍之內(80%~110%之間)為平衡狀態。平衡度小于設定范圍的最小值(<80%)為欠平衡狀態。平衡度大于設定范圍的最大值(>110%)為過平衡狀態。
(5)根據計算結果人工操作平衡電機調整平衡狀態。欠平衡時控制平衡電機使平衡塊向外側調節,對應增加配重,上行電流變小,下行電流變大,平衡度增加并趨向于100%。過平衡時控制平衡電機使平衡塊向內側調節,對應減少配重,上行電流變大,下行電流變小,平衡度減少并趨向于100%。
(6)重復以上2-5過程,直至達到設定的平衡條件。
(7)將抽油機恢復至變頻驅動狀態。
傳統平衡調節方法存在的問題:
(1)平衡調節過程為人工手動,調節結果取決于人員的技術水平和責任心。
(2)不能在變頻狀態下直接調節。
(3)人工測量電機電流(功率)通常使用的儀表均為工頻儀表,在變頻驅動狀態下無法使用,導致只能在工頻狀態下調節。
(4)不能實現隨時調節,只能人工定期檢查發現失去平衡后進行調節。
2 實現自動平衡調節的總體思路
傳統的平衡度測量方法使用儀表較多,用這種方法實現自動化調節需要在每口井上配備功圖儀等測量設備,導致系統過分復雜且成本很高。為此需要采用更簡單的平衡判斷方法。
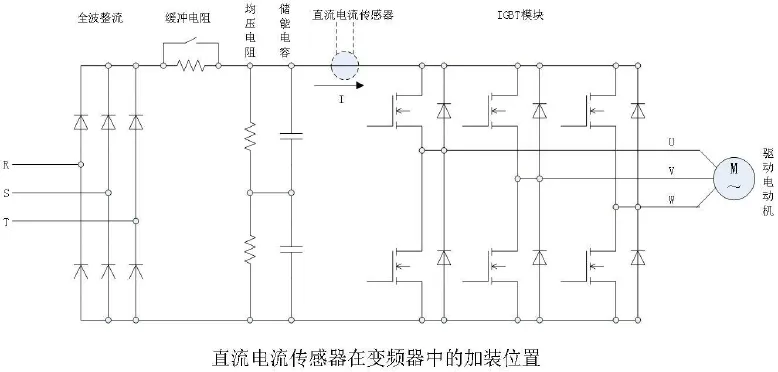
圖1

圖2
變頻器在運行過程中,當被驅動電機處于電動狀態時能量由變頻器“流”向電機,當驅動電機處于發電狀態時能量由電機“流”向變頻器并給變頻器的儲能電容充電。當抽油機出現不平衡狀態的時候會使電機處于發電狀態,因此,只要判斷出電機出現發電狀態時抽油機是運行在上行程還是下行程中就可以判定抽油機是處于欠平衡狀態還是處于過平衡狀態,根據抽油機是欠或過平衡狀態來控制平衡調節電機帶動平衡塊向著不同的方向(趨于平衡的方向)移動,最終實現自動平衡調節。
3 具體實現方法
3.1 硬件處理
在抽油機驅動電機的變頻器中加裝一個直流電流傳感器,該直流電流傳感器加裝在變頻器的IGBT模塊和儲能電容之間,用于判斷電流的流向。圖1所示為直流電流傳感器在變頻器中的安裝位置。電流I的方向為抽油機驅動電機電動工作狀態的電流方向。反方向則為驅動電機發電工作狀態的電流方向。當驅動電機出現發電狀態時說明抽油機出現了不平衡狀態。
電流由儲能電容流向IGBT模塊,則驅動電機處于電動狀態;電流由IGBT模塊流向儲能電容,則驅動電機處于發電狀態。當驅動電機發電狀態出現在抽油機的上行程中,則控制平衡電機驅動平衡塊向抽油機內側移動;當電機發電狀態出現在抽油機的下行程中,則控制平衡電機驅動平衡塊向抽油機外側移動。在抽油機的一個沖次內,出現一次驅動電機發電狀態則控制平衡電機移動平衡塊一次,直到驅動電機不再出現發電狀態為止。
抽油機上止點開關是安裝在抽油機上感受抽油機運動到最高點的開關;抽油機下止點開關是安裝在抽油機上感受抽油機運動到最低點的開關。這兩個開關用于判斷抽油機工作在上行程還是工作在下行程。
3.2 軟件處理
圖2所示為驅動電機工作狀態的判斷方法和平衡電機的控制方法。
3.3 注意事項
直流電流傳感器一般選用霍耳電流傳感器,量程應大于1.5×電機功率÷變頻器母線電壓。
平衡調節電機的點動時間根據平衡電機的轉速和傳動比決定,只要使平衡塊每次點動的位移量合適即可。
4 總結
本方法適合所有通用變頻器驅動的游梁式抽油機,系統結構緊湊、使用方便、維護簡單、成本低廉。使用中井況出現變化時,一旦出現不平衡狀態就可適時進行調節,和目前人工平衡調節相比更加及時,且抽油機不會出現嚴重的不平衡狀態。實現了平衡度實時調節,大大減輕了工人的勞動強度,實現了油井無人值守功能。
猜你喜歡
石油石化節能(2022年12期)2022-12-30 04:45:02
設備管理與維修(2022年21期)2022-12-28 07:35:42
防爆電機(2020年3期)2020-11-06 09:07:42
測控技術(2018年5期)2018-12-09 09:04:50
計算機測量與控制(2017年6期)2017-07-01 16:24:20
電子制作(2017年7期)2017-06-05 09:36:13
中國煤層氣(2014年6期)2014-08-07 03:07:05
自動化博覽(2014年12期)2014-02-28 22:34:39
河南科技(2014年18期)2014-02-27 14:14:58
河南科技(2014年16期)2014-02-27 14:13:19
