
輪椅直流無刷電機的單片機控制電路設計①
2019-02-06 04:03:55尹曙輝
科技創新導報 2019年26期
尹曙輝


摘 ? 要:直流無刷電機控制系統因性能優越已廣泛使用在電動輪椅上。使用性能優越的單片機控制系統以及采用加減速控制、速度閉環控制等主要軟件算法,可以實現電機的精準平穩運行和產品極高的性價比。本系統采用STM32F405VG為核心的控制系統,通過對操縱桿和無刷電機的驅動的算法處理,結合電樞和保護參數,實現系統的“高性能、高穩定、易維護、低成本”的特點。
關鍵詞:S加減速曲線 ?反電勢法 ?單電阻采樣法 ?閉環控制
中圖分類號:TM33 ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ? ?文獻標識碼:A ? ? ? ? ? ? ? ? ? ? ? 文章編號:1674-098X(2019)09(b)-0121-03
1 ?控制器系統組成和設計方案
1.1 系統組成
如圖1所示。
1.2 S曲線加減速實現
若綜合操縱桿及狀態生成的信號直接驅動電機,會在啟動等速度變化狀態引起強烈的沖擊感,既不舒服又不安全,因此作適當的加減速處理,常用S曲線加減速技術實現。完整的S曲線包含7個階段,在實際應用中,受到約束條件的影響會發生相應的變化,從而可能少于七個階段的S曲線。S曲線如圖2所示。
1.3 無刷電機驅動控制方案
1.3.1 反電勢法檢測轉子位置原理及改進
無位置傳感器檢測中的反EMF方法是常用的位置檢測方法[1]。由于反電勢信號中會包含脈寬調制波形功率開關過程中產生的尖峰干擾,一般采用模擬低通濾波器對其進行濾波處理。但是該方式會存在產生相移的缺陷,并且相移會隨運行頻率的變化而變化,因此很難補償校準。為了提高穩定性,可以這樣處理:檢測非導通狀態繞組的端電壓,并間接測量反電動勢過零點的時間,從而確定換向時序。
1.3.2 單電阻采樣法的缺點和解決辦法
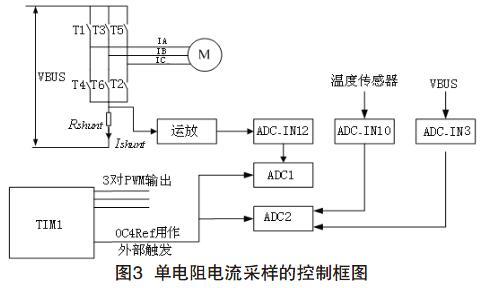
意法半導體公司對直流無刷電機驅動控制提供了專用的電機FOC驅動庫,其中V3.0版本支持雙馬達驅動,電流采樣支持單相電流采樣和三相電流采樣。具有單電阻電流采樣的無刷直流電機(BLDCM)的控制框圖如圖3所示[2]。單電阻采樣法存在兩個缺點。首先,在相同的PWM周期中只能采樣一個相電流。第二,在低調制比的情況下,3個橋臂的占空比幾乎相同,7個子時間段變為3個,并且采樣電阻器上的電流為零,這使得不可能進行采樣[3]。
第一個問題的解決方案:在適當的時間段將3個不變橋臂的占空比插入有效矢量中。插入的有效矢量的時間 Tmin是執行電流采樣所需要的最小時間,Tmin= TRise+ ADC采樣時間+死區時間,TRise為任意一個MOS管開關后,ADC通道上輸入信號的穩定時間。
第二個問題的解決方案:把有效矢量插入技術輪流用到A、B兩相。在有效矢量插入模式中,需要補償由PWM引起的相電流失真,如圖4所示。在常規模式與邊界模式進行切換時,電流的變化會被存儲起來,當 PWM模式進入相同的邊界區域后,通過加減消除這個變化量就可以對電流的采樣值進行補償。三對中一對PWM信號變形如圖4所示。
2 ?電動輪椅控制器系統整體設計
控制器系統硬件框圖如圖5所示。系統功能模塊示意圖如圖6所示。
2.1 模擬數據采集與濾波處理
由于傳感器的模擬信號輸出數值均是直流信號,采集的關鍵在于準確度,為了減少干擾信號對系統的采集準確度的干擾,本系統采用數字濾波算法。常用的數字濾波方法有多種,本設計采用了改進后的算術平均值算法,以克服其不適用計算速度較快的實時控制的缺陷。具體做法是:對采集的100個數值,使用快速排序算法進行從大到小的排序,然后舍棄最大的20個數值和最小的20個數值,取中間的60個數值進行平均計算。
2.2 電機運動控制功能模塊
電機運動控制主要在定時器中斷中完成,實現對電動輪椅兩個電機的速度控制、ADC定時采樣、過流保護等功能。注意定時器中斷處理:(1)必須首先檢測操縱桿的位置和電機運行狀態。僅當操縱桿處于中心位置并且電動輪椅處于停止狀態時,才能在輪椅上執行制動控制操作,否則可能損壞電動機。(2)電路中,電流信號分別以三種方式參與了系統的運行控制:電流的截止負反饋鏈路起到限流保護的作用;目前的正反饋補償環節改善了機械性能;負載不平衡補償協調了左右電機平衡。
參考文獻
[1] 孫小麗,鄧智泉,王騁.一種基于平均轉矩控制的無刷直流電機無位置傳感器方法[J].電工技術學報,2018,33(13):2905-2913.
[2] 李鈺. 基于FPGA的多電機控制系統設計與實現[D].華中科技大學,2017.
[3] 周永奎. 電動汽車用內埋式永磁同步電機驅動器的研究[D].福建農林大學,2015.
