基于RFT和AMF融合聚焦的雷達弱小目標檢測
2019-02-13 08:22:04商哲然易天柱盧大威
航空兵器 2019年6期
關鍵詞:檢測
梁 璞,陳 興,劉 讓,商哲然,易天柱, 盧大威
(國防科技大學 電子科學學院,長沙 410073)
0 引 言
無人機、空飄氣球等低小慢目標的不斷增加,使現有雷達對目標的檢測難度越來越大[1],對防空預警構成嚴重威脅。這些類型的目標對雷達發射電磁波的后向散射較弱,導致雷達獲取的信噪比大大降低,雷達的探測和檢測性能也隨之大幅下降。從信號處理的角度出發,研究低信噪比下的目標檢測方法具有重要的價值。本課題要點主要是,在檢測階段,需要采用相干積累技術增大接收信號的能量以提高檢測性能,難點在于如何實現長時間信號能量的積累。
雷達弱小目標長時間相參積累問題主要考慮目標是否跨距離單元和跨多普勒單元。由于場景[1]中雜波的存在,相參積累前需要進行雜波抑制。傳統的雜波抑制方法是動目標指示(Moving Target Indication, MTI)濾波器,其階數越高對零頻附近雜波抑制越好,且不會影響周圍頻率信號。根據對測試數據的處理與分析,本文采用57階的FIR濾波器實現MTI。對雜波抑制后的數據進行相參積累,考慮到目標存在跨距離單元,學者們提出了一些新的檢測方法來解決目標回波跨距離單元走動問題,實現目標能量的有效積累,典型方法有Keystone變換法[2]、相鄰交叉相關函數(Adjacent Cross Correlated Function, ACCF)[3-4]、Radon-Fourier Transform(RFT)法[5-7]等。Keystone法使用sinc插值計算,計算量較大,ACCF對單目標效果較好,處理多目標時會出現交叉項,影響聚焦。RFT法有機地將運動目標檢測(Moved Target Detection, MTD)處理和Radon變換統一起來,直接沿目標初始距離和速度確定的直線軌跡對目標回波能量進行相參積累,取得了較好的聚焦效果,但標準RFT存在運算量大、實時性差、量化損失大的缺點。針對上述不足,文獻[8-9]提出了Chirp-Z 變換加速的RFT(Chirp-Z Transform, CZT-RFT)算法。該算法的基本思想是將RFT算法在頻域利用CZT變換實現,從而顯著提高了算法的運算速度和能量聚焦效果。進一步,考慮到小目標信噪比較低,需要在MTI的基礎上對數據做進一步的雜波抑制和聚焦,常用的方法有廣義似然比檢測(Generalized Likelihood Ratio Test, GLRT)[10]和自適應匹配濾波器(Adaptive Matched Filter, AMF)[11],其中,AMF的運算量要比GLRT的運算量小。RFT算法對大目標的聚焦效果更好,而AMF算法對小目標的聚焦效果更好,將兩者聚焦結果進行單元選大,可以將兩者的優勢結合,得到RFT和AMF的融合聚焦結果,將聚焦結果送入單元平均恒虛警檢測器(Cell-Averaging Constant False Alarm Rate, CA-CFAR)中,得到最終的檢測結果送入后續的數據處理。
1 問題模型
1.1 信號模型
假設目標為點目標,則目標相對于雷達徑向變化模型[12]為
(1)
根據速度和加速度的取值情況,一般將運動模型簡化為四種情形:① 低速勻速直線運動模型。該模型主要針對常規空中飛行器,認為目標具有一定的運動速度,但在積累周期內假定目標在同一個距離單元內,忽略目標的機動性。② 高速勻速直線運動模型。該模型主要針對高速運動飛行器,假設目標具有高的運動速度,忽略目標的機動性,目標在積累周期內出現跨距離單元走動現象,但距離維的軌跡可以采用直線描述。③ 高速勻加速直線運動模型。該模型主要針對高速高機動飛行器目標,在高速勻速直線運動模型的基礎上,利用加速度來描述目標高機動性以及跨距離單元、跨多普勒單元現象,而且加速度還會使目標在距離維上出現運動軌跡彎曲現象。④ 高階運動模型。高階運動以及轉動等更為復雜的運動需要更多的參數來描述目標的運動情況,相應的長時間積累方法也就變得更加復雜。
在以上運動模型中,傳統的脈沖積累一般基于模型①設計,高速高機動目標長時間積累方法則基于模型②和③設計,而模型④較為復雜,根據應用不作考慮。
假設雷達發射的為線性調頻信號:
(2)

(3)
(4)
當a=0時,將式(1)代入式(4)得
(5)
式(5)由三項組成:第一項為回波包絡;第二項為載頻項,表示目標初始位置;第三項為由目標徑向運動產生的多普勒項。經過脈沖壓縮后的回波信號為
(6)
根據駐定相位原理,其頻域形式為

(7)
當目標徑向加速度a≠0時,目標存在二次相位,將式(1)代入式(4)得
(8)
經過脈沖壓縮后的回波信號為
(9)
由式(9)可知,由于出現距離走動的二次時間項,脈壓后結果也不再只是沒有加速度情況下的一條斜線,而是呈一定彎曲的曲線。
頻域形式為

(10)
其中:β=f/fc。式(10)由四項組成:第一指數項為基帶信號調頻率項;第二指數項為目標位置;第三指數項為目標徑向速度引起的多普勒項;第四指數項為加速度引起的調頻項。
1.2 跨距離單元走動
由式(6)和式(9)可以看出,高速高機動運動目標回波隨著慢時間tm變化,即在積累時間內,經過脈壓后目標回波峰值不再位于同一個距離單元內,會出現距離單元走動的現象。若距離單元的大小為c/(2B),相參積累周期TCIT=MTr,則目標的跨距離走動情況如下:
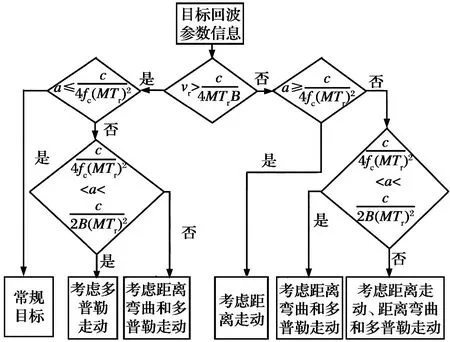
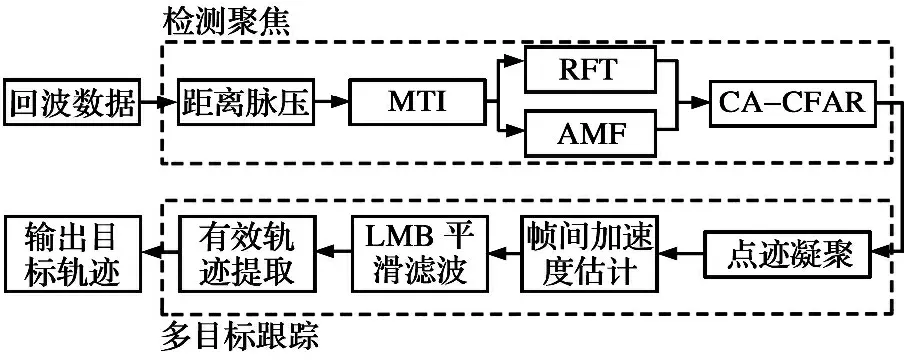
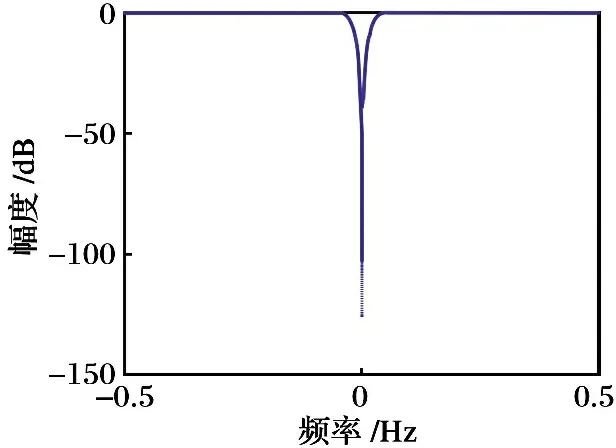
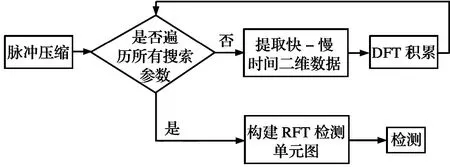
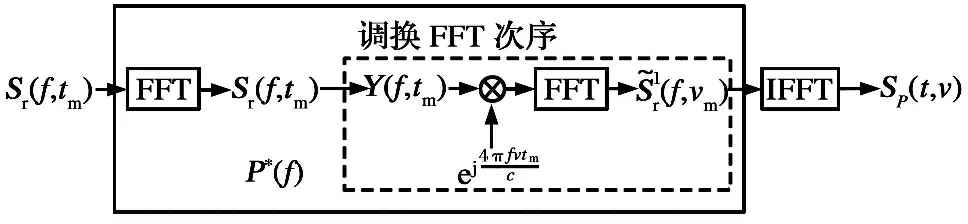
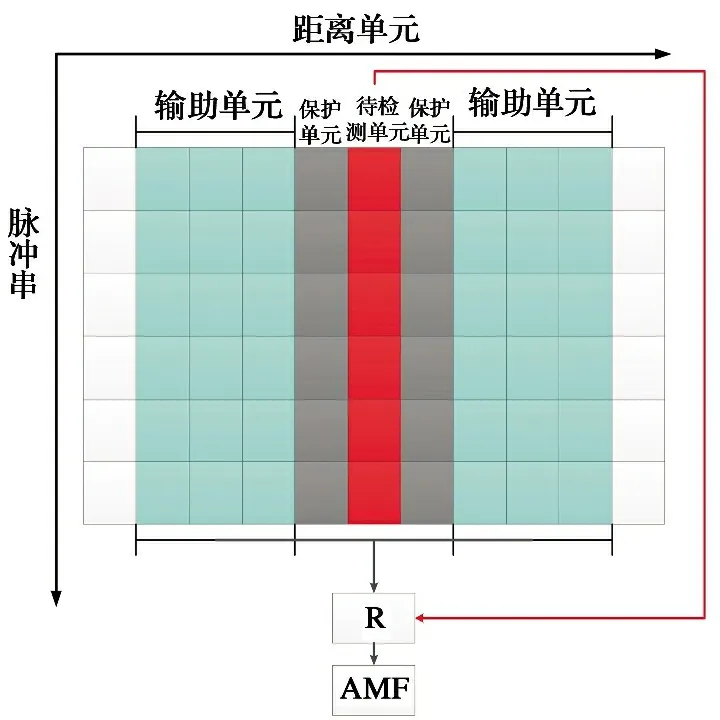
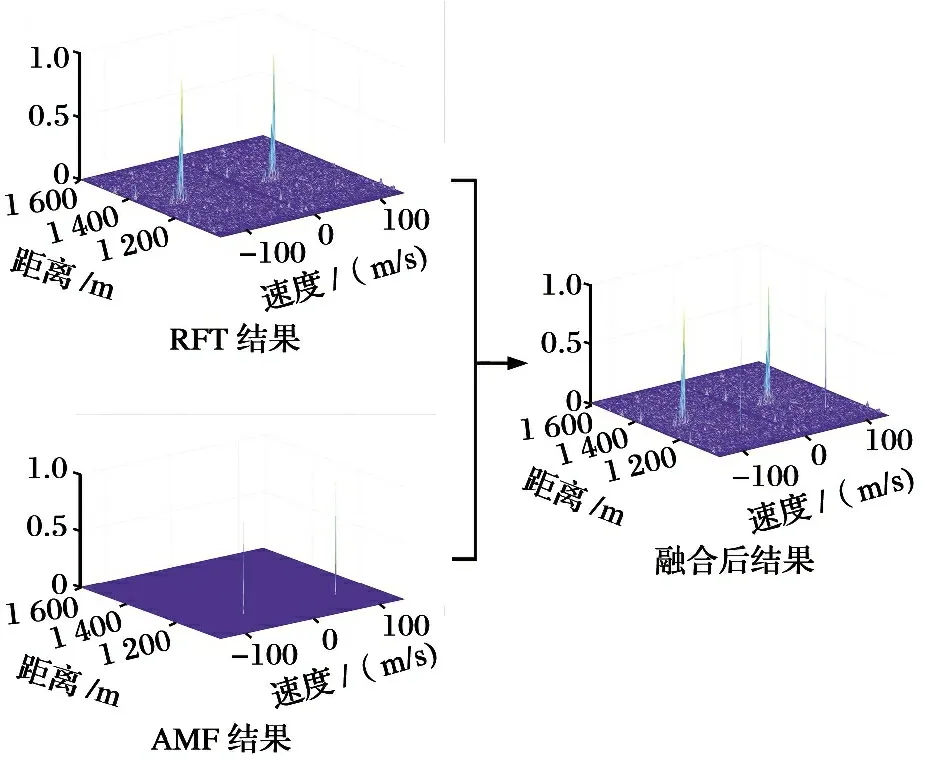
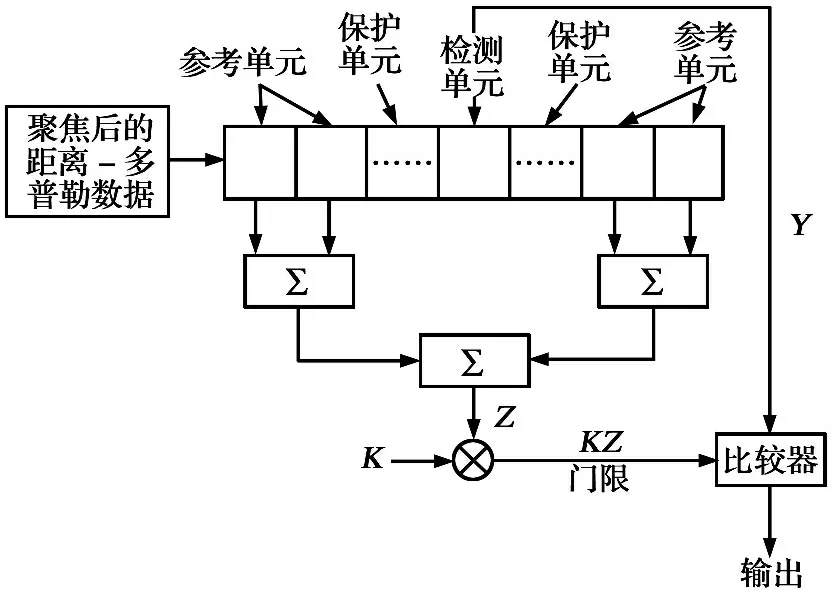
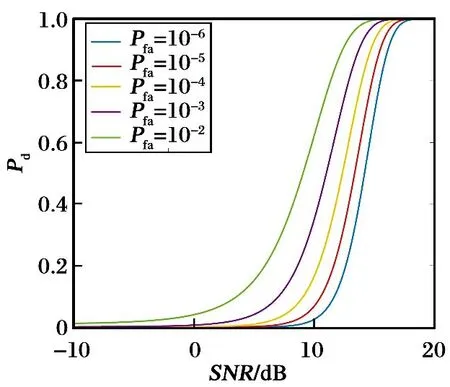
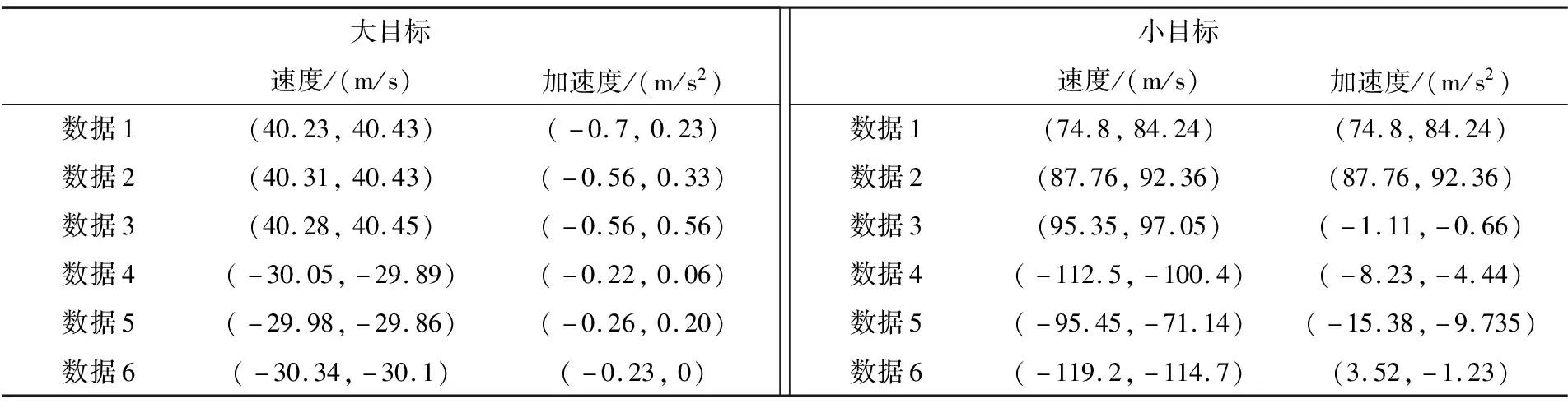
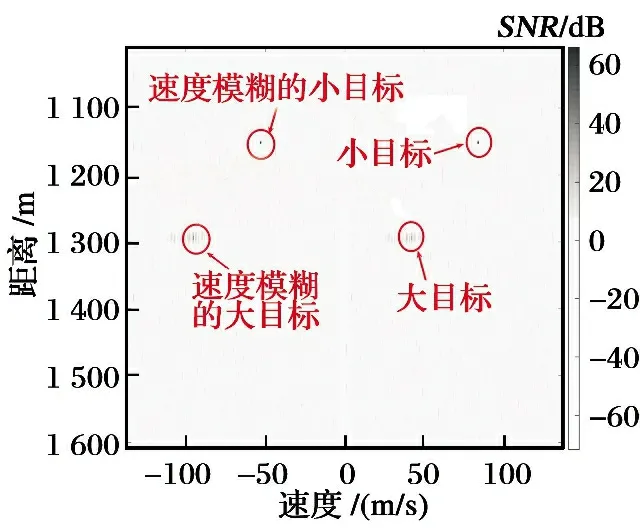
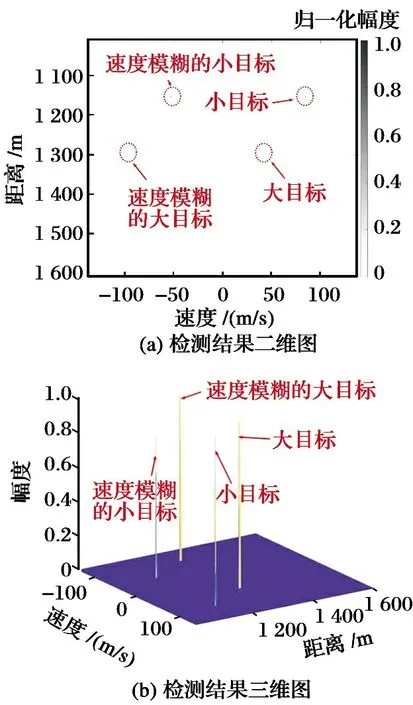
① 當2vrMTr ② 當vr>c/(4MTrB)且a ③ 當vr>c/(4MTrB)且a>c/[2B(MTr)2]時,根據式(9),目標距離走動超出了一個距離單元,且在相參積累時間內加速度使目標走動超出半個距離單元,所以目標同時出現跨距離單元和距離彎曲現象。 對于高速勻加速目標,加速度不僅會引起運動軌跡的彎曲,同時還會引起多普勒單元走動。對式(10)進行整理得 (11) 多普勒變化規律為 fdm(tm)=fd+uatm (12) 為簡化運算,當目標的加速度較小時,往往忽略目標跨多普勒單元走動的影響。多普勒單元大小為1/(MTr),則目標的跨多普勒單元走動情況有下面兩種情況: ①a≤c/[4fc(MTr)2]時,多普勒走動小于半個多普勒單元,加速度影響可以忽略,可直接對目標回波信號進行慢時間維FFT,實現相參積累。 ② 當c/[4fc(MTr)2] 綜上所述,根據目標速度和加速度取值的不同,長時間積累方法設計需要考慮的影響因素如圖1所示。 圖1 長時間積累方法處理思路 Fig.1 Long-term accumulation method processing ideas 根據應用可知,對一幀即800個脈沖進行積累,則跨距離單元速度需要37.5 m/s,加速度需要3 000 m/s2,所以應用中一般不會出現距離彎曲。對于跨多普勒,需要加速度為3.4 m/s2。根據測試數據的真值可知, 大目標不會跨多普勒單元,小目標在一幀積累中可能存在跨多普勒單元的情況。 根據分析,本文提出了一種RFT和AMF融合聚焦以及LMB平滑的高精度PD雷達弱小目標檢測跟蹤算法。算法總體流程如圖2所示,主要包括目標的檢測聚焦和多目標狀態估計兩部分。 圖2 算法總體流程 Fig.2 Overall flow of the algorithm MTI[13]通過延遲對消來消除固定雜波,常見的為2脈沖或3脈沖(即1階或2階)對消。3脈沖對消實際上是濾波器與慢時間上的各個脈沖進行脈沖間濾波,即做內積。階數越高對0頻附近雜波抑制越好,且不會影響周圍頻率信號。考慮到回波數據的相參積累脈沖數較多,本文設計了一個57階的FIR高通濾波器來實現靜態雜波剔除,其頻率響應曲線如圖3所示。 圖3 頻率響應曲線 Fig.3 Frequency response curve RFT[5]是一種優秀的相參積累方法,可以看作是廣義的MTD,其統一了MTD、Hough變換和Radon變換。RFT無需對目標距離走動進行校正,通過對目標的初始位置和速度進行搜索,提取距離-慢時間二維平面中的目標觀測值,之后通過離散傅里葉變換(DFT)對提取出的觀測值進行積分,從而實現對目標回波能量的相參積累。所以,RFT也可以看作一組多普勒濾波器組,可根據需要將這組濾波器組的數量和系數進行改變。其定義式為 (13) 圖4 RFT算法流程 Fig.4 RFT algorithm flow RFT算法在對目標回波進行相參積累的過程中,目標樣本數據的提取是通過取整函數進行尋址運算提取出來的,難免存在誤差,這就會使回波能量的積累受到損失,即“量化損失”。如果可以通過頻域的方式實現上述變換,就可以減少通過時域尋址帶來的量化損失。CZT-RFT就是在頻域實現的RFT算法[9],并且由于其在頻域中的對目標能量的積分可通過Chirp-Z變換在一個盲速區間內快速實現,所以其相較于RFT算法運算量大大減少,但也由于其通過Chip-Z變換實現,所以其多普勒分辨率由雷達的參數決定,不能改變。 與頻域校正補償算法類似,在頻域乘以延遲指數項的共軛ej4πfVrtm/c,將t-tm平面中斜率為v的直線進行校正,最后通過快速傅里葉變換求頻點fdi=2vri/λ處的能量,完成對目標能量的相參積累。整個過程如下: (14) (15) 式(14)補償因其距離走動的相位項,并通過IFFT變換回時域,式(15)通過FFT對校正后的直線進行積累,即求取對應頻點fdi=2vri/λ上的幅度。將式(14)和式(15)合并可以得到 (16) 式(16)即為頻域相位補償法的整個流程,其中,ej4πfvtm/c為頻域相位補償法中的補償因子,ej2πft為頻域相位補償法中的IFFT。交換式(16)積分順序可得 則式(14)~(15)變為 (18) (19) 對式(18)進行推導得 (20) 通過式(20)可以看出,將快時間頻域相位補償和慢時間相參積累結合,再進行式(19)計算,即快時間IFFT將信號變換回時域,其流程如圖5所示。 圖5 交換兩次FFT次序信號處理流程 Fig.5 Signal processing flows for exchanging two FFT order 式(18)~(19)離散化形式為 (21) (22) 另外,式(20)采用頻域相乘補償因子補償距離走動的方法,不會出現時域處理時因量化誤差引起的能量損失,這是CZT-RFT算法的一個優點。但是,直接計算式運算量大,由于其運算過程和線性調頻Z變換(Chirp-Z Transform, CZT)的形式相同,可以采用CZT進行計算,表達式為 e-jπa(k-m)2/M] (23) 其中,a是一個系數。如果a=(1-ηn), 則式(23)和式(21)完全相同。這樣,式(23)可以通過CZT計算,而CZT可通過FFT實現。 CZT計算實際上是對序列x(n)的非等間隔采樣,將DFT中的數字頻率1/M乘以小于1的系數來調整需要得到的頻率值。在CZT-RFT中,每一次CZT在慢時間序列進行,根據慢時間序列所在的快時間頻點對數字頻率進行調整。其原理類似于MTD,區別在于CZT-RFT是對在脈壓后的快時間從時域變換到頻域,再對每一頻點處的慢時間序列進行CZT。 對每一慢時間序列進行CZT后,再對快時間頻域進行IFFT,即可得到距離-速度二維結果,即CZT-RFT的最終結果。 基于CZT的快速RFT,在單個盲速區間內利用CZT在頻域實現RFT算法(CZT-RFT),顯著提高了算法的運算速度和能量積累效果,但對高速目標而言,當存在多普勒模糊時,該方法需要對多普勒模糊數進行遍歷搜索并作補償處理,然后對多次補償后的積累結果進行選大處理,得到最終的積累結果。雷達的脈沖重復頻率與目標多普勒頻率關系為 (24) 自適應匹配濾波器[11](Adaptive Matched Filter,AMF)是根據廣義似然比準則推導出的自適應濾波器,可有效抑制雜波,并內嵌有恒虛警效果。 二元假設檢驗的信號模型為 (25) 式中:y為待檢測單元;yk為輔助單元,假設獨立同分布;a是與傳輸信道和RCS有關的復數,通常未知;s為導向矢量,應用中為時域導向矢量,即 (26) 式(25)中c為雜波,服從均值為零、協方差為R的多元復合高斯分布,則兩種假設下的概率分布如下: (27) 其中,(·)H為共軛轉置,根據廣義似然比準則: (28) 可得到濾波器輸出為 (29) 其中,R的最大似然估計可通過檢測單元附近的輔助單元yk得到,即 (30) 通過對導向矢量的遍歷可得到每個多普勒值下的濾波結果。 AMF算法示意圖如圖6所示。可以看出,因為大目標距離向能量擴散,在聚焦大目標時, AMF會將大目標擴散到參考單元的信號能量認為是雜波能量,從而對大目標進行抑制,聚焦效果不好。但由于小目標距離向能量擴散較弱,對小目標聚焦的同時對周圍的雜波進行抑制,可有效提高小目標對于其附近雜波的信雜比。RFT對大目標聚焦效果好,但由于小目標能量過小且信雜比提升有限,對小目標的聚焦效果不佳。 圖6 AMF方法示意圖 Fig.6 Schematic diagram of the AMF method 通過RFT和AMF可得到各自的聚焦結果,所以RFT和AMF各有所長,可將其結果進行融合。由于RFT和AMF的結果量綱不同,分別對RFT和AMF結果進行歸一化,之后將兩者結果進行單元選大,得到RFT和AMF融合聚焦結果。圖7為RFT和AMF的融合聚焦結果。 圖7 RFT和AMF融合聚焦 Fig.7 RFT and AMF fusion focus 將CZT-RFT和AMF的融合聚焦結果送入CFAR檢測器中進行檢測。本文采用單元平均CFAR(CA-CFAR[14])。CA-CFAR處理原理如圖8所示,單元平均是在一系列距離和多普勒單元上進行的。 圖8 CA-CFAR原理圖 Fig.8 CA-CFAR schematic 被檢測單元是中心單元,由于CUT可能會溢出,所以在平均處理中排除了CUT的臨近單元,這些單元稱為保護單元。將Nr個參考單元(在CUT的每一邊各Nr/2個)的輸出平均,將所有參考單元的平均估計值乘以一個常數K(用作縮放比例),就得到了門限。如果Y>KZ, 則認為CUT中存在目標。其中,K根據虛警概率Pfa和參考單元數Nr求得,程序中設置虛警率為Pfa=10-6,參考單元為Nr=36,則 (31) 其檢測概率理論值為 (32) 從圖9中可以得到理論值,當虛警概率Pfa=10-6,SNR≥20 dB時,Pd接近于1。 圖9Pd隨SNR變化理論值 Fig.9 Theoretical value ofPdas a function ofSNR 表1給出了已知的雷達系統參數。由雷達基本參數可以計算出雷達的波長為0.008 6 m,最大不模糊速度為137.14 m/s(不模糊速度范圍從0~137.14 m/s),由于給定速度不超過120 m/s,因此存在一次速度模糊。最大不模糊距離為4 688 m,遠大于觀測場景寬度598 m,因此可以不考慮距離模糊。要求輸出數據率為50 ms輸出一次結果(即1 600個脈沖輸出一次結果)。如果準確聚焦,50 ms的相干積累時長可以達到的速度精度為0.086 m/s,25 ms(800個脈沖)的相干積累時長可以達到的速度精度為0.172 m/s。這兩種相干積累時長的精度都高于應用中給定的精度0.24 m/s(即±0.12 m/s),考慮計算的效率,本文選用相干積累時長為25 ms,也就是800個脈沖作相干積累。 表1 雷達基本參數 根據測試數據給出的真值,可知場景中存在兩個機動目標,數據1~6中的時長均為2 s,目標速度和加速度(真值間隔50 ms一次)的變化范圍如表2所示。 表2 目標真值變化范圍 由表2可知,在2 s內,大目標的速度在-30 m/s或者40 m/s附近變化,加速度小于0.7 m/s2,可認為是勻速運動;小目標的速度在75 m/s~120 m/s之間變化,存在較大的加速度,最大值為-15.38 m/s2。 根據原理分析,若對800個脈沖進行相干積累,當目標速度大于37.5 m/s,需要考慮距離走動,加速度大于3 000 m/s2時,才需考慮距離彎曲。跨多普勒單元需要目標的加速度大于3.43 m/s2,可知大目標不會跨多普勒單元,小目標可能會跨多普勒單元。因此,對800個脈沖進行積累時,大、小目標均要考慮距離走動,不需要考慮距離彎曲。大目標不會跨多普勒單元,小目標可能會跨多普勒單元。 取表2數據1的800個脈沖進行回波分析。圖10(a)為經過脈沖壓縮后的原始回波,圖10(b)為脈沖對消后直接FFT的二維聚焦結果,從結果中可以清晰看到大目標,而小目標則較不明顯。圖10(c)為脈沖對消后直接FFT的三維聚焦結果,圖中可清晰看到大目標,可隱約看到小目標。需注意的是,測試數據1中小目標的信噪比相對其他數據中小目標的信噪比要高,即使這樣,采用直接FFT的方法聚焦小目標的效果也很差。 圖10 回波分析 Fig.10 Echo analysis 由于小目標的信噪比較低,直接FFT聚焦處理一般檢測不出小目標。可以考慮對脈沖對消后的雷達數據進行RFT和AMF聚焦,得到RFT和AMF的融合聚焦結果,最后通過CA-CFAR檢測器進行檢測。 圖11為本文方法對測試數據1第一幀數據處理的速度和距離二維圖。可以看到目標位置信號的信噪比明顯高于其他位置,其中,大目標不止在本身的速度位置上信噪比較高,在對應的模糊速度上也有較高的信噪比,由于模糊速度和距離不匹配可以通過跟蹤去除;小目標在速度方向(對應多普勒維)由于沒有估計加速度有輕微的散焦,在對應的模糊速度上也有一定的信噪比。圖12為使用CA-CFAR對每個距離單元檢測的結果,虛警概率Pfa為10-6。從二維和三維圖中可以看到小目標可被檢測出,大目標被檢測出的同時在對應的模糊速度位置也出現虛警。 圖11 RFT+AMF聚焦結果,各單元相對于其周圍噪聲的信噪比圖 Fig.11 RFT+AMF focusing results, signal-to-noise ratio plot of each unit relative to its surrounding noise 圖12 檢測結果 Fig.12 Test results 針對雷達弱小目標的檢測問題,本文設計了一套完整的聚焦-檢測算法。本文算法的優勢在于:RFT和AMF融合聚焦方法可以有效實現信號中強目標和弱小目標的聚焦,提高了弱小目標檢測前的信噪比,從而極大地提高了CFAR檢測器對弱小目標的檢測概率。1.3 跨多普勒單元走動

2 基于RFT和AMF融合聚焦的弱小目標檢測
2.1 動目標指示(MTI)
2.2 RFT算法


2.3 自適應匹配濾波器(AMF)



2.4 單元平均恒虛警(CA-CFAR)

3 數據處理結果
3.1 雷達基本參數

3.2 目標特性分析

3.3 檢測聚焦的結果
4 結 論
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48