雙三相永磁同步電機在電動汽車中的應用研究
2019-02-25 02:23:04李永崗
微特電機 2019年1期
蔡 萍,李永崗,趙 赫
(1.武漢大學,武漢 430000; 2.中國礦業大學,徐州 221116)
0 引 言
隨著經濟的不斷發展和環境污染的日益嚴重,電動汽車因其污染小、綠色環保的優點,得到了越來越多的關注。現有的電動汽車多采用傳統的三相電機驅動系統,但因其受限于電力電子功率器件的等級,無法直接應用于大功率場合。針對這一問題,常通過串并聯功率器件來實現大功率輸出,但是該方法將會對系統的可靠性造成影響[1]。因此,多相電機驅動系統以其顯著的優點為電動汽車驅動系統提供了新的解決方案[1-3]:低壓功率器件實現大功率輸出,更適用于電動汽車的供電方式;轉矩脈動小,改善了電機低速運行時的性能;電動汽車的運行工況惡劣,易發生故障,而多相電機驅動系統的冗余能力保證了電機在故障情況下的平穩運行;多相電機具有多自由度,使得電機的控制更加靈活。在以電動汽車為代表的低壓、大功率場合,多相電機顯得尤為合適,但是由于相數的增加,控制策略也隨之更加復雜。
六相電機包括對稱六相電機和不對稱六相電機(相移30°雙三相電機),其中,相移30°雙三相電機因其轉矩脈動小的特點而得到了更多的研究。此外,從轉矩密度及功率密度的角度出發,永磁同步電機(以下簡稱PMSM)更適合作為電動汽車驅動電機[4]。國內外對于雙三相電機系統的研究已日趨成熟,但是將其用在電動汽車上的研究還不是很深入。國外很多文獻中提到了多相電機在電動車等領域的應用價值,但少有人針對具體電機給出解決方案。國內以浙江大學、哈爾濱工業大學為代表的多所院校對多相電機進行了深入研究,雖然在其研究成果中也提到了電動汽車,但還是主要側重于電機本身的研究,和電動汽車的結合還不夠。本文將以相移30°雙三相PMSM 為研究對象,針對電動汽車充電續里程、復雜工況下高可靠運行的要求,在雙三相PMSM基于空間矢量解耦模型的基礎上對其控制策略進行討論研究。
1 雙三相PMSM數學模型
雙三相PMSM系統具有高階、非線性、強耦合的特點,故對其仿真模型的建立必須要經過坐標變換,為了簡化分析,現做出如下假設[5]:氣隙磁動勢與磁鏈按正弦規律分布;忽略磁飽和與鐵心損耗;忽略繞組間的互漏感。
1.1 雙三相PMSM自然坐標系下的方程
電壓方程和磁鏈方程分別如下:
(1)
ψs=Lsis+γψfd
(2)

磁共能對機械角度求偏導得電磁轉矩:
(3)
式中:θm表示機械角度;p表示極對數。
系統的運動方程:
(4)
式中:ωm表示機械角頻率;J表示轉動慣量;B表示阻尼系數;TL表示負載轉矩。
1.2 基于空間矢量解耦的雙三相PMSM數學模型
雙三相電機模型的建立主要有兩種方法,一種是雙d-q變換法,即將兩套三相繞組分別看作2個單元,按照傳統三相電機進行建模[6],但是該方法并沒有表現出雙三相電機多自由度的特點;另一種是基于矢量空間解耦的方法,該方法是從不同諧波子空間的角度進行建模[3]。本文只討論基于空間矢量解耦的數學模型。
雙三相繞組實際上是以對稱十二相繞組中反相的兩套繞組作為一相,故存在如下的約束條件:
(5)
使用功率不變約束條件,經過化簡,整理得到六相靜止坐標變換陣如下:
(6)
該變換陣可將雙三相電機的各變量分解到3個相互獨立的子空間,其中只有α,β子空間參與電機的機電能量轉換,當繞組結構為中性點隔離結構時,o1,o2子空間恒為零,且z1,z2子空間不參與能量轉換。故在旋轉坐標變換時只需要對α,β子空間的矢量旋轉即可。經過計算化簡可以得到新的電壓和磁鏈方程:
(7)

(8)
電磁轉矩:
(9)
式中:LD=3Laad+Laal;LQ=3Laaq+Laal;LZ=Laal;Laad和Laaq分別表示繞組的d軸和q軸主自感,Laal表示自漏感。
2 調制技術
2.1 基于零序平衡矢量的六相SVPWM 方法
在大功率拖動領域里,雖然多相電機驅動系統比傳統的三相驅動系統有更多的優勢,但是當采用電壓型逆變器對其供電時,雙三相PMSM內會產生較大的諧波電流,從而產生較大的損耗并且會對半導體裝置提出更高的要求。現已提出的降低諧波電流幅值的方法主要有:在電機和逆變器之間加入諧波濾波器,修改電機結構,在供電側實行專門的脈寬調制控制策略或采用特殊的逆變器結構。本文所研究的抑制諧波電流的方法是基于零序平衡矢量的六相SVPWM 技術。采用的電壓型逆變器供電的雙三相PMSM控制系統如圖1所示。
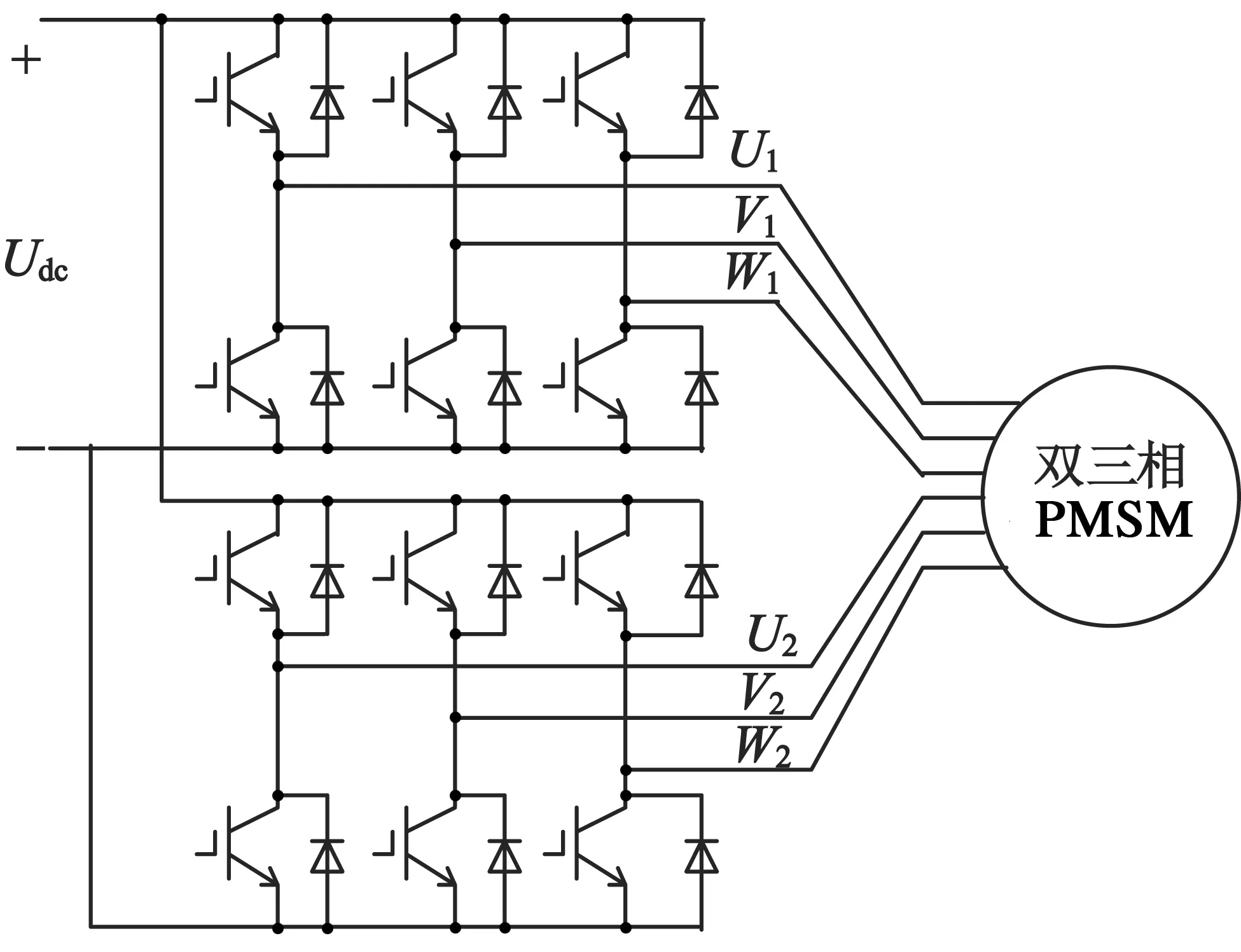
圖1 電壓型逆變器供電的雙三相PMSM控制系統
六相電壓型逆變器共有26=64種開關狀態,利用空間矢量分解,將這64個電壓矢量投射在α,β;z1,z2;o1,o23個子空間。當電機定子繞組采用雙中點連接時,o1,o2子空間上的所有矢量投影到了原點,此時系統的維數降到了四維,只有α,β子空間與機電能量轉換有關,而z1,z2和o1,o2子空間均不參與機電能量的轉換,簡化了雙三相PMSM控制的復雜度[2,7]。由此可見,該種方法的控制策略就是充分利用α,β子空間的電壓向量以滿足電機的轉矩控制要求,同時使得z1,z2子空間的電壓矢量伏-秒平均電壓為零,以達到最大程度抑制諧波電流的目的。
選擇在α,β平面幅值最大、z1,z2平面幅值最小的12個電壓向量作為基本電壓向量,如圖2所示。

圖2 12個基本電壓向量
選擇圖2中α,β子平面內任意3個相鄰的向量合成一個新向量作為中間向量,得到12個中間向量,當這幾個向量以一定比例的作用時間作用時,z1,z2平面內中間向量伏-秒平均作用電壓將為零,從而達到抑制定子諧波電流的作用。
2.2 過調制技術
過調制技術可以在解決低母線電壓利用場合(如電動汽車)中母線電壓利用率低的問題的同時,提高驅動電機的輸出功率和轉矩[9]。這里定義調制度:
(10)
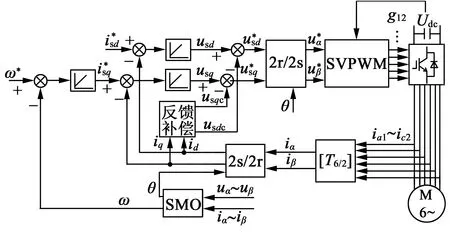
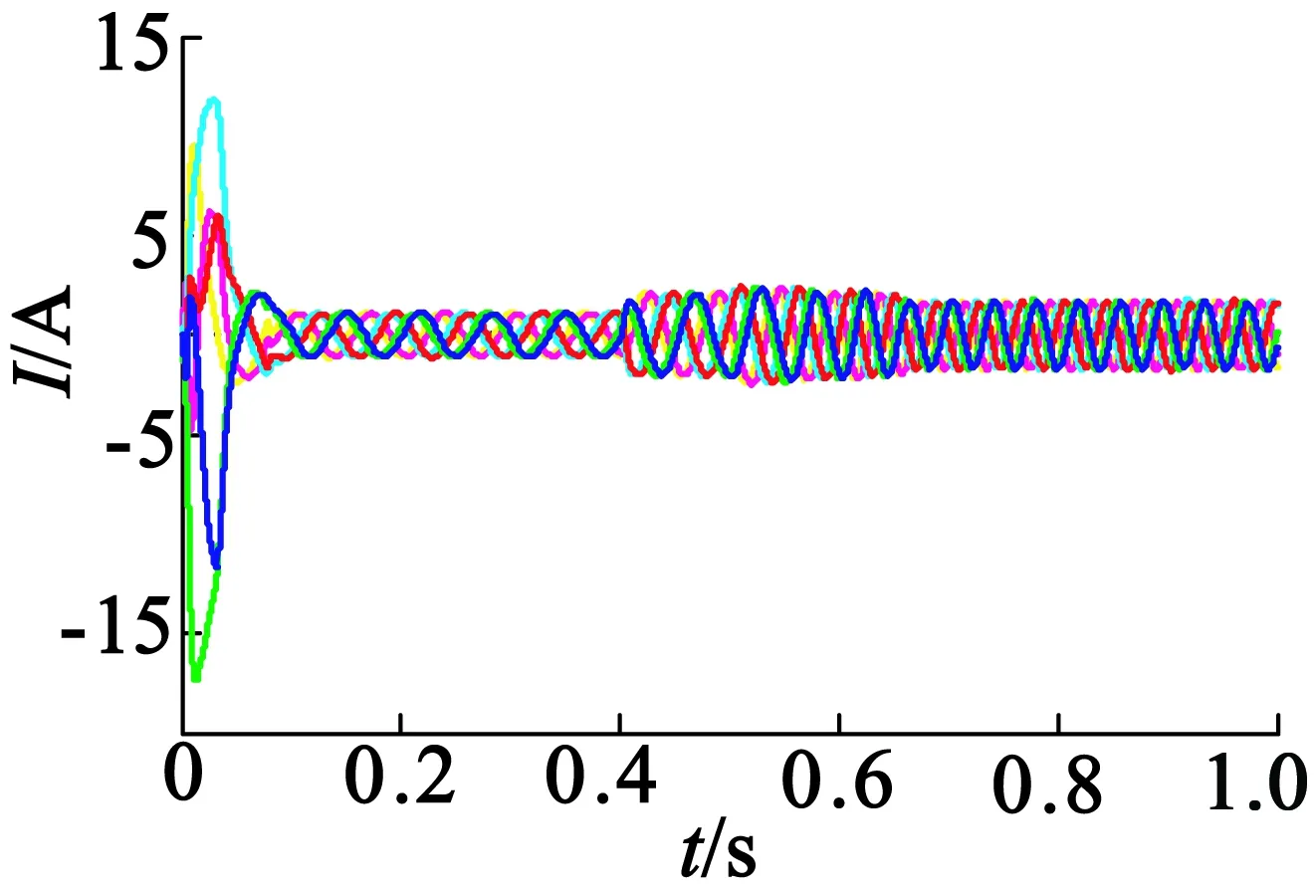
式中:‖vr‖為參考相電壓的幅值;UDC為逆變器的直流母線電壓。過調制區間I和過調制區間II的調制系數分別為1 當調制比m<1時,逆變器輸出正弦調制電壓;當m=1時,零矢量的作用時間為零,此時為線性調制區與過調制區的分界點;當m>1時,進入過調制區域,計算得到的零矢量作用時間將為負值,沒有意義。為了解決這一問題,獲得更小的電壓失真,將過調制區分為過調制區間Ⅰ和過調制區間Ⅱ,對每個階段采用不同的控制算法。圖3中M1,M2,M3分別表示線性調制區及過調制區間Ⅰ,Ⅱ的上限值。 圖3 工作區間的選擇 在過調制區間Ⅰ中,可以通過相位不變的方法限制末端超出六邊形的參考電壓[9],使得零矢量的作用時間保持為零。因此當參考矢量位于圓形軌跡上時,可以用下式: (11) 計算各矢量的作用時間,而當參考矢量位于正六邊形上時,各矢量的作用時間應用下式進行修正: (12) 在過調制區間II中,當參考電壓矢量的相角差值達到αh時,輸出矢量將會從六邊形的頂點跳到邊界,αh表示從正六邊形頂點向正六邊形邊沿跳轉的角度。當參考矢量位于正六邊形上時,根據式(12)計算各矢量的作用時間。 將雙三相PMSM在α,β靜止坐標系下的相關方程進行旋轉變換,得到d,q坐標系下的方程。雙三相PMSM在d,q軸的定子電壓方程中除了電機的阻抗電壓以及反電動勢外,還存在交叉耦合電壓。耦合電壓的存在將影響系統的動靜態性能,因此要采取相應的辦法消除。耦合電壓的消除方式通常有前饋解耦與反饋解耦兩種方式。前饋解耦是通過將電機定子電流的給定值作為參考值來計算交叉耦合電壓的大小,并將其疊加到電壓輸入控制端進行補償。反饋補償解耦是采用電機電流的反饋量來計算耦合電壓大小,并將之疊加補償,實現電壓解耦。前饋補償是一種穩態補償方式,結構簡單,但受電機參數影響較大;而反饋解耦是一種動態補償,可以實現系統實時解耦,本文采用反饋補償解耦方式。 雙三相PMSM基于轉子磁場定向控制系統包括轉速調節環節,并通過引入反饋構成閉環控制系統。其中轉速的獲取是整個控制系統中最為關鍵的一步,傳統的方式是采用轉速傳感器,但是該方法受環境因素較大,且會在一定程度上增加硬件投資。針對這一問題,本文將采用無速度傳感器控制方式,根據電壓電流等信號計算得到的轉速代替實際轉速值。其中,基于滑模觀測器的無速度控制算法結構簡單、響應快速、魯棒性強,故而得到了廣泛的應用。在滑模變結構的作用下,系統將會運動到適當的滑模超平面上,并滑動到平衡點,此時系統將不再受外界因素的影響,從而獲得滿意的動態性能[10]。 考慮PMSM的凸極效應,則兩相靜止坐標系下的電壓-電流方程: (13) (14) (15) (16) 式中:Δθ表示相移角;ω為運行指令速度;ωc為低通濾波器的截止頻率。 最后得到基于滑模觀測器的雙三相PMSM無速度傳感器矢量控制系統框圖,如圖4所示。 圖4 基于滑模觀測器的雙三相PMSM 仿真條件:初始給定轉速300 r/min,在0.5 s突變到500 r/min,在0.4 s突加負載10 N·m;轉速波形、轉速誤差、六相定子電流波形和角度波形,如圖5所示。 (a) 轉速及其轉速誤差 (b) 定子電流 (c) 角度 由仿真結果可以看出,基于空間解耦的雙三相PMSM矢量控制,在突加負載時能快速恢復給定值,所設計的滑模觀測器能夠準確跟蹤轉速,可以快速響應轉速的突變和負載的突變,轉速誤差極小,電流波形正弦度較好。仿真結果表明了設計的滑模觀測器結構簡單、響應快速,魯棒性強的特點。 基于多相電機驅動系統的顯著優點,其將會隨著更深入的研究而被廣泛應用于低壓大功率驅動場合。本文以雙三相PMSM為研究對象,結合新能源電動汽車,討論了基于空間矢量解耦理論的數學模型;在該模型的基礎上進一步討論了基于空間矢量解耦理論的空間矢量脈寬調制(SVPWM)技術、過調制技術、轉子磁場定向的矢量控制以及無速度傳感器控制,為電動汽車用電機驅動系統提供了一個新的解決方案。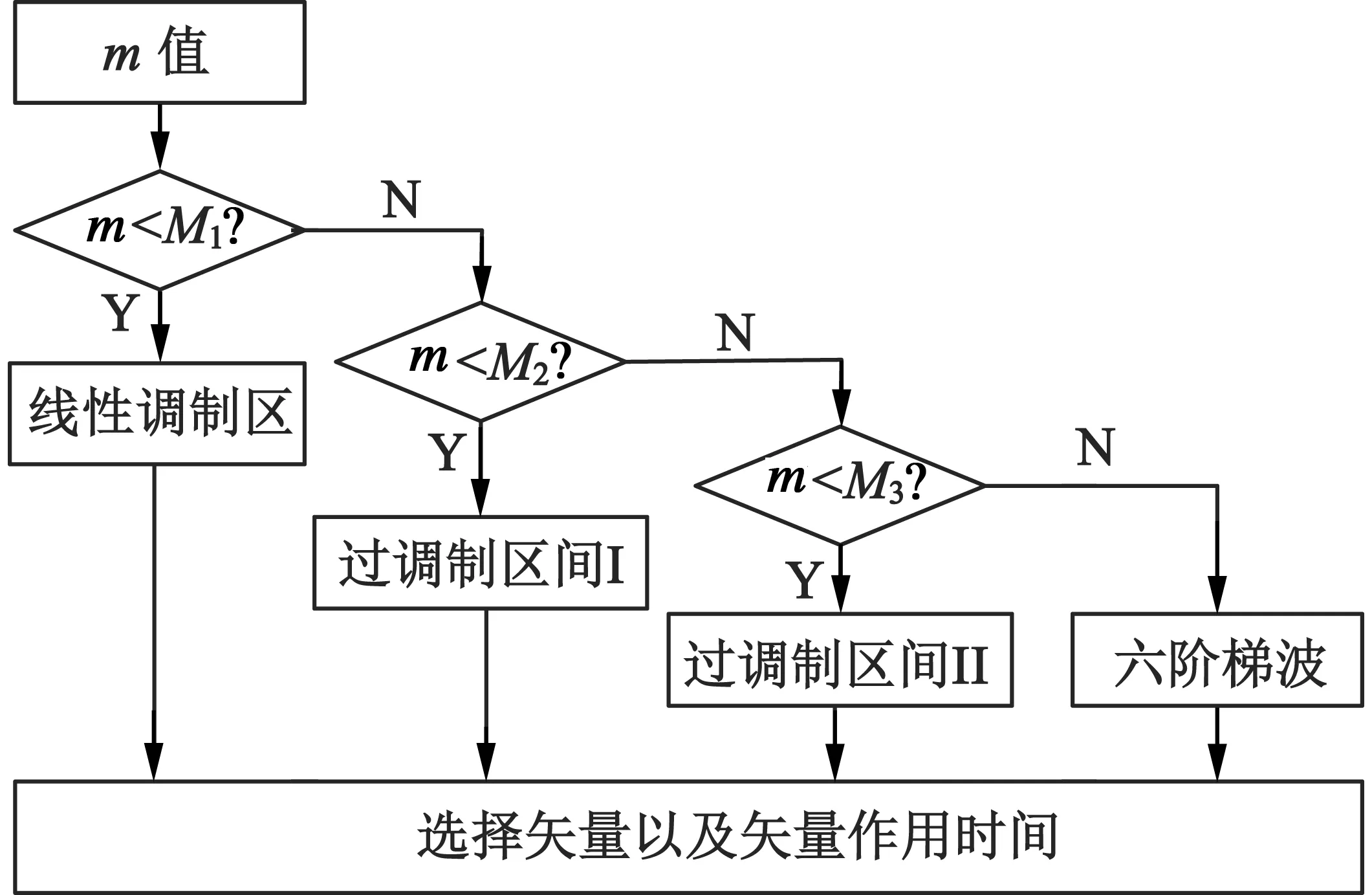
3 基于滑模觀測器的雙三相PMSM無速度傳感器矢量控制系統
3.1 雙三相PMSM基于轉子磁場定向的矢量控制
3.2 基于滑模觀測器的無速度傳感器控制



4 仿真驗證


5 結 語