強度混合動力系統換擋器及其控制策略設計
2019-03-22 03:35:14于海生
汽車電器 2019年2期
于海生
(科力遠混合動力技術有限公司上海分公司,上海 201501)
某新型強度混合動力汽車采用混聯式傳動結構,通過雙電機雙行星排動力分流系統[1-2],將來自發動機的能量合理分配給電機和驅動軸,并通過調節動力分流系統中兩個電機的轉速使得該系統類似無級變速器一樣工作,也稱其為電子無級變速器。該混合動力系統由于沒有與傳統換擋器的機械連接,且傳統換擋器也無法匹配和滿足其結構和工作模式,因此需要設計新的電子換擋器來滿足混合動力系統的換擋需求。
電子換擋器與混合動力系統沒有直接的機械連接,而是通過混合動力電控單元ECU采集當前電子換擋器發送的擋位位置傳感器信號,經分析計算后,判斷其當前擋位狀態,并根據各擋位下汽車行駛狀態的不同發送指令控制混合動力系統的運行模式。目前電子換擋器在豐田汽車公司THS混合動力系統[3,4]上得到了成熟的應用,但是其在中國汽車制造公司的應用還未得到普及,且中國對電子換擋器及其控制策略的設計方法也少有研究。本文基于強度混合動力系統的結構和工作模式,設計可匹配和滿足其工作的電子換擋器及其控制策略,并通過Simulink系統建模[5-6]和MotoTron快速控制原型開發工具[7-8]對電子換擋器及其控制策略的設計做試驗驗證。
1 某強度混合動力系統
圖1為某強度混合動力系統結構簡圖。該系統采用具有多自由度、輸入輸出靈活可控以及結構緊湊、體積小、速比大等優點的行星齒輪機構,將來自發動機的能量合理分配,并通過調節電機MG1和電機MG2的轉速和扭矩以平衡發動機負荷,降低整車油耗和排放。該系統通過分析和判斷當前換擋器擋位狀態、加速和制動踏板開度以及整車系統狀態和運行工況,可以形成由電機MG1單獨驅動或電機MG2單獨驅動或雙電機聯合驅動的純電動模式,以及由發動機和雙電機共同驅動的混合動力模式。
2 換擋器設計
2.1 換擋器結構設計
根據混合動力系統的工作模式,結合駕駛員的駕駛意圖,判斷整車的運行狀態應包括前進行駛狀態、倒車行駛狀態、動力中斷狀態和駐車狀態,相應地在換擋器中設立前進擋、倒車擋、空擋和駐車擋。前進擋或倒車擋表明駕駛員有驅動車輛向前方或后方行駛的意圖,駕駛員可以在該擋位下通過對加速踏板和制動踏板的操作,經混合動力電控單元ECU的系統控制策略,決定動力總成的動力輸出,改變或維持整車前進或倒車的行駛狀態。空擋表明駕駛員有切斷整車動力輸出的意圖,在空擋下駕駛員無法通過對加速踏板的操作來控制和改變整車動力輸出。空擋作為前進擋、倒車擋和駐車擋三者之間相互切換的過渡擋位,可以避免前進擋和倒車擋切換時,整車行使慣性對整車動力系統和行駛系造成的破壞,以及在進入駐車狀態后整車動力系統對駐車機構產生的持續滑磨。此外,空擋作為換擋器故障或整車故障時的入口擋位,可以保證整車安全。駐車擋表明駕駛員有使車輛保持靜止或轉入靜止的意圖,整車動力中斷,同時通過駐車機構對動力輸出軸產生一定的駐車制動力。混合動力電控單元ECU根據當前的整車運行狀態判斷是否對駐車請求信號作出響應,以決定是否控制駐車機構鎖止動力輸出軸使得整車進入駐車狀態。
圖2為電子換擋器結構示意圖。由圖2可知,電子換擋器共有5個擋位:原始擋位O、空擋N、前進擋D、倒車擋R以及駐車擋P。換擋手柄始終處于O擋位置,當撥動換擋器手柄至其他任意擋位后,換擋器手柄都會自動回歸O擋位置。
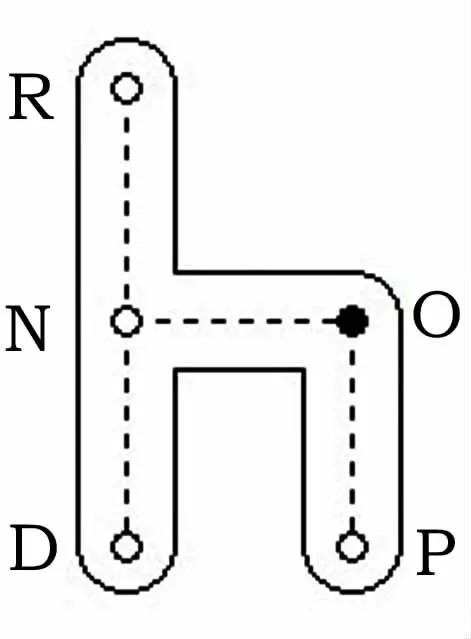
圖2 電子換擋器結構示意圖
2.2 換擋器邏輯
為了判斷當前換擋器手柄所處的擋位位置,在換擋器中設計2路位置傳感器X1和X2,通過采集換擋器手柄所處各擋位位置時2路位置傳感器的電壓信號x1和x2,經混合動力電控單元ECU分析計算后,得到與各擋位位置相對應的數值y,以判斷當前的換擋器手柄位置。換擋器手柄位置與2路位置傳感器電壓信號對照如表1所示,對應換擋器手柄位置y值1為N擋,2為D擋,3為R擋,4為P擋,0為O擋。

表1 手柄位置與傳感器信號對照表

圖3 換擋器邏輯
換擋器邏輯如圖3所示。換擋器手柄處于O擋初始位置,當撥動手柄至N擋位置時,系統檢測2路位置傳感器的電壓信號,經ECU分析計算后,得到y為1,系統認定換擋器手柄已進入N擋位置,并執行O擋至N擋的狀態切換程序O2N,系統工作在N擋狀態下,而后換擋手柄自動從N擋回歸O擋位置,y為0,但不再執行擋位狀態切換程序,系統仍保持在N擋狀態下運行。在系統允許的工況下,若要使系統進入前進擋D狀態下運行,則撥動換擋器手柄從O擋至D擋位置,手柄需先經過N擋再進入D擋,ECU分析2路位置傳感器電壓信號,得到y為2,系統認定換擋手柄已進入D擋位置,并執行N擋至D擋的狀態切換程序N2D,系統進入D擋狀態,而后換擋器手柄自動經N擋回歸O擋位置,但不再執行擋位狀態切換程序,不改變當前的擋位狀態,系統仍保持在D擋狀態下運行。
3 控制策略設計
3.1 控制策略
換擋器系統控制策略的設計應能滿足駕駛員正常的換擋需求,并且能夠避免因駕駛員的誤操作而導致的對整車動力系統、行駛系和駐車機構造成的損壞,保證行車安全。換擋器系統控制策略簡圖如圖4所示,其中v表示整車車速,α表示制動踏板開度。

圖4 系統控制策略簡圖
整車在正常情況下上電完成后默認保持在P擋駐車狀態下,駐車機構鎖止并保持整車處于靜止狀態,且系統無動力輸出。為防止駐車機構對動力系統和行駛系造成的損壞,在整車運行前必須先退出P擋駐車狀態,取消駐車機構對動力輸出軸的鎖止作用。在整車車速v<1 km/h,且制動踏板開度α>30%時,撥動換擋器手柄至D擋或R擋,即執行N2D或N2R擋位狀態切換程序,或在駐車狀態下直接撥動換擋器手柄至N擋,即執行O2N擋位狀態切換程序,系統都會打開駐車機構,系統從P擋駐車狀態進入D擋、R擋或N擋狀態下運行。為避免整車運動慣性對動力系統和行駛系造成的沖擊和損壞,禁止前進擋D擋與倒車擋R擋之間進行直接互換,只有在整車車速v<1 km/h且制動踏板開度α>30%的情況下,才能夠相互切換。整車在D擋或R擋動力擋位狀態下運行時,只要撥動換擋器手柄至N擋位置,即執行O2N擋位狀態切換程序,系統即進入空擋狀態,整車動力中斷。
駐車擋P擋的響應根據混合動力電控單元ECU通過當前的整車運行狀態所決定。整車在中高速行駛時,撥動換擋器手柄至P擋位置,系統不會響應P擋信號,仍將保持當前的擋位運行狀態。當車速v<5 km/h時,撥動換擋器手柄至P擋位置,系統才會從當前動力擋位進入空擋,動力中斷,整車滑行,并保持P擋信號,直至車速v<1 km/h時,系統控制駐車機構鎖止動力輸出軸,整車進入P擋駐車狀態。整車在車速5 km/h以下P擋滑行期間,撥動換擋器手柄進入當前整車狀態允許的動力擋位,都將取消P擋保持信號,整車重新獲得動力。
3.2 故障冗余
在整車行駛過程中,為防止因電子換擋器2路位置傳感器故障、擋位識別錯誤、信號傳輸錯誤等導致系統對當前擋位狀態的錯誤判斷,從而致使擋位狀態與當前汽車行駛工況不符,影響行車安全,因此需要對2路位置傳感器信號的識別與傳輸作故障冗余處理,保證電子換擋器擋位信號的可靠性。當電子換擋器的2路位置傳感器電壓信號與系統正常工作時的信號不匹配或者識別錯誤時,系統從當前動力擋位自動進入空擋狀態,動力中斷,保證行車安全。此外,在整車行駛過程中為避免出現跳擋而導致整車運行模式改變,并致使動力系統和行駛系受損,影響行車安全,因此需對換擋器手柄在目標擋位上的停留時間作冗余處理。設定撥動換擋器手柄進入目標擋位時,若在目標擋位上停留時間小于0.1 s,或者由于2路位置傳感器故障導致的信號在0.1 s以內的短暫脈沖跳變,即認定為跳擋,為保證行車安全,系統保持當前擋位狀態不變;若停留時間在0.1~0.5 s,即認定為換擋過快,為保證行車安全并配合駕駛員的換擋意圖,系統進入空擋,整車動力中斷,直至重新撥動換擋器手柄至目標擋位且停留時間在0.5 s以上,系統才能認定已進入目標擋位狀態。
4 試驗驗證
4.1 試驗控制系統
通過Simulink建模工具將換擋器邏輯、控制策略及故障冗余算法轉變成系統控制模型,用于對該換擋器及其控制策略設計方法的試驗驗證,系統控制模型如圖5所示。系統通過信號輸入模塊Signal_input輸入整車車速v、制動踏板開度α以及2路位置傳感器電壓信號x1和x2,經換擋器邏輯模塊Shift_logic判斷當前換擋器手柄所在的擋位位置并執行相應的擋位狀態切換程序,再通過系統控制策略及故障冗余模塊Control_strategy輸出當前擋位狀態s。

圖5 系統控制模型
通過MotoTron快速控制原型開發工具將系統控制模型編譯成代碼后刷寫進混合動力電控單元ECU中,構成快速控制原型測試系統,并通過臺架試驗驗證換擋器及其控制策略設計方法的正確性和可行性[9-10]。試驗臺架控制簡圖如圖6所示,ECU控制負載電機以模擬整車車速,通過電子換擋器發送的2路位置傳感器電壓信號,經換擋器邏輯、控制策略及故障冗余算法判斷當前的擋位狀態并控制混合動力系統運行在相應的工作模式下。

圖6 試驗臺架控制簡圖
4.2 試驗結果分析
試驗開始系統上電后默認進入P擋駐車狀態;撥動換擋器手柄至前進擋D位置,系統檢測到制動踏板開度α為0,不符合擋位狀態切換條件,因此不進入D擋狀態,系統仍保持在P擋駐車狀態下;操作制動踏板至50%開度的同時再次撥動換擋器手柄至D擋位置,系統打開駐車機構,進入D擋狀態運行,松開制動踏板,車速緩慢增加,操作加速踏板至一定開度,保持系統加速狀態;撥動換擋器手柄至P擋位置,由于此刻車速較高,系統不響應P擋信號,因此仍保持在D擋狀態下運行;松開加速踏板的同時撥動換擋器手柄至N擋位置,系統進入空擋,動力中斷,減速滑行;重新撥動換擋器手柄至D擋位置,系統進入D擋,重新獲得動力;操作制動踏板至20%開度,系統減速,待車速<5 km/h時,撥動換擋器手柄至P擋位置,系統進入空擋,動力中斷,直至車速<1 km/h時,系統控制駐車機構鎖止動力輸出軸,進入駐車狀態。輸入信號整車車速v和制動踏板開度α以及2路位置傳感器電壓信號x1和x2如圖7、圖8所示,輸出信號換擋器手柄位置y和擋位狀態s如圖9所示。

圖7 整車車速v和制動踏板開度α信號
5 結論
本文基于混合動力系統的結構和工作模式,設計了可匹配該系統的電子換擋器及其控制策略,通過建立控制模型并采用快速控制原型的方式對設計方法進行試驗驗證,試驗結果表明。
1)換擋器及換擋器邏輯的設計可匹配混合動力系統的結構和工作模式,滿足駕駛員正常的換擋需求。
2)換擋器控制策略及故障冗余算法的設計,可避免因駕駛員換擋誤操作導致的整車擋位狀態和行駛狀態的改變以及對整車動力系統和傳動系統造成的沖擊和損壞,保證系統控制的可靠性和整車行車安全。
猜你喜歡
車主之友(2022年6期)2023-01-30 07:58:16
鴨綠江(2021年35期)2021-04-19 12:24:18
能源工程(2020年6期)2021-01-26 00:55:22
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
黃河之聲(2019年23期)2019-12-17 19:08:43
汽車實用技術(2019年17期)2019-09-21 03:46:32
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
電子制作(2018年11期)2018-08-04 03:25:42
黃河之聲(2017年13期)2017-01-28 13:30:17
