基于人工勢場法的車道保持系統
2019-04-06 12:31:24胡振國謝有浩
汽車工程學報 2019年2期
胡振國,謝有浩,2
(1.合肥工業大學 汽車與交通工程學院,合肥 230009;2.安徽獵豹汽車有限公司,安徽,滁州 239064)
在造成重大交通事故的各種因素中,駕駛員精神不集中或誤操作導致的車道偏離是較為重要的因素之一。據統計,車道偏離導致的交通事故占交通事故總量的30%[1]。為了保障駕駛安全,降低重大交通事故發生率,需進一步對車道保持系統進行研究。
車道保持系統的橫向控制主要有轉向輪轉向和差動制動兩種方式,而差動制動方式因其會對車速產生影響使用并不廣泛。文獻[2]和文獻[3]中都是用PI控制跟蹤理想橫擺角速度的方法設計了轉角控制器,理想橫擺角速度是由估計出的側向輪胎力代入參考車輛模型中計算得到,但是輪胎力估計算法如分段仿射逼近法等過于復雜,會導致系統響應較慢。人工勢場法因其在路徑規劃中表現出優異的響應速度和實時性能而被引入車道保持系統的控制系統中。汪明磊等[4]闡述了一種基于道路勢場產生橫向控制力的車道保持系統。 ROSSETTER等[5]利用人工勢場法的概念,通過給車道線和障礙物劃定危險度來產生虛擬勢場,以勢場函數梯度規劃出一條無障礙路徑。以上方法是基于道路建立的勢場,其勢場函數是偏移車道中心線距離的函數,此函數對速度量沒有響應,導致系統并不自適應于車速變化。
本文提出了一種基于跨道時間(Time to Lane Crossing,TLC)勢場的車道保持系統,人工勢場法以車道偏離過程建立虛擬勢場,以TLC為參數設計了勢場函數,建立了多模式TLC模型,根據計算得到的TLC設計了基于TLC勢場的轉角控制器,從而控制方向盤轉向,實現車道保持。
1 參考模型
1.1 車輛動力學模型
針對本研究的控制方法,車輛動力學模型采用線性二自由度車輛模型[6],該車輛模型縱向車速恒定,只具有橫擺運動和側向運動這兩個自由度。通過動力學分析,可以得到二自由度車輛運動微分方程為:

式中:m為整車質量;Iz為繞z軸的轉動慣量;a和b分別為質心到前軸、后軸的距離;δf為前輪轉角;vx為縱向速度;vy為側向速度;β為質心側偏角;ωr為橫擺角速度;k1、k2分別為前、后車輪側偏剛度。
1.2 車輛-道路模型
車道保持系統,首先要確定車輛行駛在道路上的位置,因此建立車輛-道路模型,根據實際車輛側向位移、車輛幾何模型、偏航角來推導出車輛前輪距左、右車道邊界的距離[7],如圖1所示。

圖1 車輛-道路坐標
假定車輛在直道上,偏航角為φ,車輛質心到左車道線距離為yl,可得到前輪到左車道線的距離為:

前輪到右車道線的距離為:

式中:yll、yrl分別為左前輪和右前輪到左車道線的距離;ylr、yrr分別為左前輪和右前輪到右車道線的距離;為車輛質心到右車道線距離,L為車道寬度;
假定偏航角和前輪轉角逆時針方向為正,一般情況下道路半徑Rr會遠大于y1,因此上式同樣適用于彎曲道路。
2 車道保持系統控制器設計
2.1 車道保持系統控制結構設計
針對車道保持系統,設計了基于人工勢場法的轉角控制器,如圖2所示。計算出跨道時間作為特征量,采用人工勢場法計算出勢場力,代入參考二自由度車輛模型得到理想側向加速度和理想橫擺角加速度,依照速度大小分別選擇用理想側向加速度和理想橫擺角加速度計算得到理想方向盤轉角,通過PID控制后確定方向盤轉角輸入。

圖2 轉角控制器結構
2.2 基于跨道時間勢場法的轉角控制器設計
2.2.1 跨道時間計算
(1)直線道路跨道時間計算
直線道路跨道模型如圖3所示,為求跨道時間,只需要求出跨道距離DLC。根據三角函數定理,知道轉彎半徑和夾角llξ即可。根據運動學原理,轉彎半徑繼 續 可 求 得最終求得可計算出跨道距離

圖3 直線道路跨道模型
則跨道時間為:

式中:v為車速;ωr為橫擺角速度;lf為前輪距。
(2)彎曲道路跨道時間計算
彎曲道路跨道模型如圖4所示,轉彎半徑
則跨道時間為:


圖4 彎曲道路跨道模型
上述跨道時間計算模型皆以左跨道模式建立,其也適用于右跨道模式,使用時需將公式中左前輪到左車道邊界的距離yll換成右前輪到右車道邊界的距離yrr。
2.2.2 跨道時間勢場模型
基于人工勢場法的理論[8],利用上述計算得到的跨道時間建立跨道時間勢場,其主要原理是車輛在不同跨道時間區域具有不同的車道偏離危險程度。該危險程度決定著車輛所受車道中心線給予的引力勢能,由跨道時間勢場函數表示。在勢場中同一位置,車輛所受勢場力的大小由勢場函數的增益確定。
假定車輛行駛在單車道,忽略換道行為,車輛在道路上受到勢場力的作用,勢場需滿足以下條件:
(1)車道中心線上勢場力為0。
(2)越靠近車道邊界線勢場力越大。
考慮到以上兩點,勢場函數選取為跨道時間倒數的函數。勢場函數變化趨勢大致如圖5所示,圖中橫坐標正負代表車道偏離方向。車輛偏航角為0且處于車道中心線時,跨道時間無窮大,其倒數為0,勢能為0;跨道時間越小,其倒數越大,勢能越大。
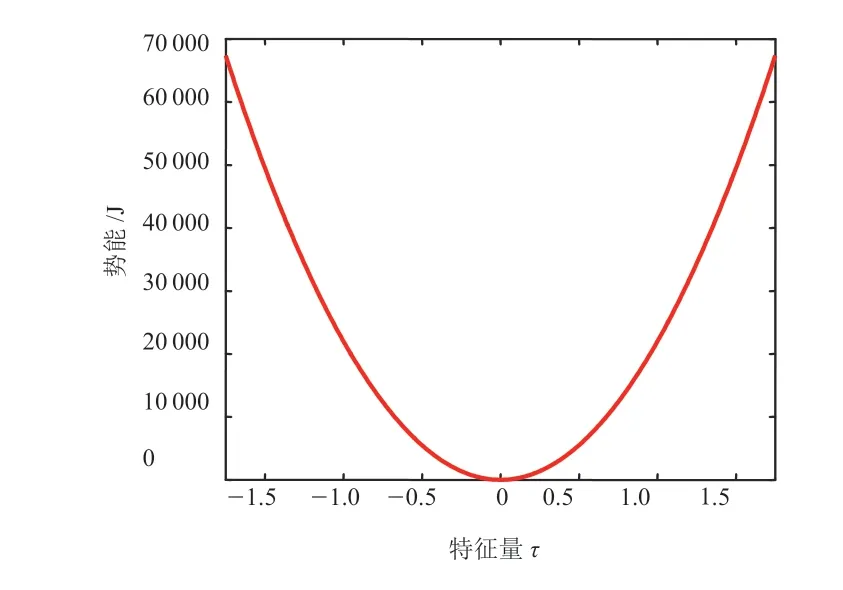
圖5 勢場函數
為簡化計算,本文所用勢場函數數學表達式為:


2.2.3 轉角控制器設計
假設車輛行駛時偏航角φ較小,由式(6)可得跨道時間勢場所產生的勢場力為:

根據車輛運動學原理,式(1)可化為合力形式:

式中:FY為車輛側向力合力;MZ為車輛總的橫擺力矩。
將勢場力作為車輛側向合力代入式(9)得:

當車輛低速行駛時,較大的方向盤轉角變化只能引起較小的側向加速度變化,橫擺角速度變化更易于感知;當車輛處于較高車速時,較小方向盤轉角即可使側向加速度明顯改變,側向加速度變化更易于感知。為了獲得更好的反饋控制效果,在低速時,采用橫擺角速度計算理想方向盤轉角;在較高車速時,采用側向加速度計算理想方向盤轉角。車輛的理想側向加速度和 理想橫擺角速度已求得,可以根據其與方向盤轉角之間的增益來確定理想方向盤轉角公式如下:


計算出理想方向盤轉角與實際方向盤轉角的差值,再由PID控制確定車道保持系統的方向盤轉角輸入。
3 仿真結果與分析
為了驗證所提方法的可行性與有效性,在Carsim/Simulink仿真環境中對上述車輛模型及控制算法進行建模與仿真試驗,跨道時間勢場及車輛模型的部分參數見表1。

表1 系統模型參數
選擇Carsim中直道和彎道情況都有的道路環境,路面附著系數取0.8,方向盤轉角在1~2 s內由0°轉到10°,分別在10 m/s,20 m/s,30 m/s的車速下進行仿真,仿真結果如圖6所示。


圖6 仿真結果對比
圖6a是車速為10 m/s的仿真結果,跨道時間勢場法的DLC最大幅值為0.47 m,道路勢場法的DLC最大幅值為0.58 m,兩種方法都在5.5 s左右使車輛回歸了車道中心,而跨道時間勢場法DLC最大幅值較小且回歸較快。圖6b是車速為20 m/s的仿真結果,跨道時間勢場法的DLC最大幅值為0.65 m,道路勢場法的DLC最大幅值為0.81 m,跨道時間勢場法于6.0 s左右回歸了車道中心,而道路勢場法則產生了兩次超調波動于11.0 s左右回歸了車道中心。圖6c是車速為30 m/s的仿真結果,跨道時間勢場法的DLC最大幅值為0.78 m,道路勢場法的DLC最大幅值為0.94 m,跨道時間勢場法于8.0 s左右回歸了車道中心,而道路勢場法則產生了四次超調波動于15 s左右回歸了車道中心。跨道時間勢場法在設計跨道時間時預測了前方一段路程,因此其實時性較好。跨道時間勢場法對車速也有較好的響應,其在各種速度工況下都可以有很好的控制效果,無超調波動。但是道路勢場法在設計時并未考慮車速,其勢場函數與車速無關,導致對車速無響應,隨著車速的增大其控制產生了超調甚至多次超調震蕩。
綜上分析,本文設計的跨道時間勢場法實時性較好,對速度有較好的響應,控制效果要比道路勢場法更好。
4 實車試驗
在某款汽車上搭建車道保持實車試驗平臺,如圖7所示。試驗器材有:試驗車、方向盤轉角傳感器、攝像頭、數字圖像處理器等。

圖7 實車試驗平臺
車道保持試驗原理為:車輛行駛在道路上,攝像頭采集前方道路圖像由DSP進行處理,識別出車道線并計算出車路偏差,將車路偏差以CAN信號形式發送到控制器CRIO上,CRIO同時還接收方向盤轉角傳感器發送的方向盤轉角和轉角速度信號,CRIO中有寫好的按照第2節設計的轉角控制器程序,由其計算期望方向盤轉角,發送給轉向控制器執行,從而實現車道保持。
如圖8所示,實車試驗場地為環形道路的紅色加粗路段,由于是彎道,為了保證試驗安全,車速由駕駛員保持在20~40 km/h左右。圖9給出了試驗過程中車輛DLC、側向加速度和方向盤轉角的結果。由圖9可知,跨道時間勢場法的DLC波動較小,保持在0.1 m以內,道路勢場法則波動較大,側向加速度和方向盤轉角的控制效果也有類似的情況,兩種方法都能夠在真實道路上實現車道保持功能,但總的來看,跨道時間勢場法要優于道路勢場法。

圖8 主動轉向實車試驗場景

圖9 車道保持實車試驗結果
5 結論
本文針對車道保持系統中的橫向控制問題,采用人工勢場法設計了轉角控制器,選擇跨道時間為勢場參數,建立多模式跨道時間模型,以跨道時間為變量設計了勢場函數,通過Carsim/Simulink聯合仿真和實車試驗驗證了本文所述方法的有效性和可行性。其在車道保持中的控制效果要優于道路勢場法,且在不同車速工況下均表現出了良好的控制效果,提高了駕駛安全性。