基于電動汽車電機控制器的傳感處理電路及控制策略的研究
2019-04-18 07:55:34戚金鳳
汽車實用技術(shù) 2019年7期
戚金鳳
?
基于電動汽車電機控制器的傳感處理電路及控制策略的研究
戚金鳳
(廣州科技職業(yè)技術(shù)學(xué)院,廣東 廣州 510550)
隨著人們生活水平的不斷提高,利用汽車作為代步工具的需求逐漸加大,傳統(tǒng)燃油汽車帶來的環(huán)境污染問題也越來越引人關(guān)注,因而節(jié)能環(huán)保的新能源汽車受到了很大的重視,純電動汽車和混合動力汽車得到廣泛的應(yīng)用和普及,電機控制器成為新能源汽車的一個新研究領(lǐng)域。文章針對純電動汽車電機控制器的傳感器及其處理電路,電機轉(zhuǎn)速控制策略進行了進入研究。首先介紹直流電機控制器的組成,然后描述了直流電機控制器的傳感器及其處理電路,并根據(jù)傳感信號研究直流電機的轉(zhuǎn)速控制策略。最后通過matlab simulink軟件對電機的轉(zhuǎn)速控制策略進行仿真試驗,試驗結(jié)果良好。
電機控制器;電動汽車;控制策略;控制器;傳感器
前言
隨著社會的不斷發(fā)展和人類生活水平的不斷提高,環(huán)保和能源成為人類的最關(guān)注的問題,為了解決該問題,汽車生產(chǎn)廠商逐漸放棄傳統(tǒng)燃油汽車的開發(fā),轉(zhuǎn)而研制開發(fā)更環(huán)保、更節(jié)能、零排放的新能源汽車,而純電動汽車和混合動力汽車成為這些汽車廠商的主要研究方向。純電動汽車的動力系統(tǒng)主要由動力電池、充電器、電機及其驅(qū)動控制器組成;混合動力汽車是以油電混合的形式提供兩種或兩種以上的能量源輸出,其動力系統(tǒng)既有純電動汽車的結(jié)構(gòu)也有傳統(tǒng)燃油汽車的結(jié)構(gòu),在電池能量不足的情況下轉(zhuǎn)為內(nèi)燃機發(fā)電補充。這兩種汽車的車輪驅(qū)動都是通過電機來完成,因此,電機及其驅(qū)動控制器必不可少的核心部件,而研究電動汽車電機控制器的傳感器及其處理電路、電機轉(zhuǎn)速控制策略對電機控制器具有非常重要的意義。
1 電機控制器的組成
電機控制器主要由驅(qū)動器(Driver)、功率變換模塊(Po -wer Converter)、電機控制模塊(Electronic Controller)、三部分組成。
驅(qū)動器是將微處理器對電機輸出的控制信號轉(zhuǎn)換為功率變換模塊需求的大電流驅(qū)動信號,并實現(xiàn)強弱信號的電氣隔離,增強抗干擾能力。
功率變換模塊的作用是將能量存儲裝置提供的高壓直流電變換成適合牽引電機運行的電源形式, 是對電機電流的控制,以實現(xiàn)電機的不同轉(zhuǎn)速。一般由輸入濾波器、功率母線、功率開關(guān)拓樸、驅(qū)動電路和輸出濾波器組成。其中, 用于直流驅(qū)動系統(tǒng)的功率變換器一般稱為斬波器[1],其中關(guān)鍵是開關(guān)功率器件,常用的功率器件有功率場效應(yīng)管、大功率晶體管、晶閘管、絕緣柵雙極晶體管和智能功率模塊等。
電機控制模塊包含硬件電路和相應(yīng)的軟件,硬件電路主要包括微處理器及其以該處理器為核心組成的外圍電路,外圍電路有監(jiān)測電機電流、電壓、溫度、轉(zhuǎn)速的傳感監(jiān)測電路,以及數(shù)據(jù)交換通信電路。軟件是根據(jù)不同類型電機的特點實現(xiàn)相應(yīng)的控制算法的程序。
電機控制器的硬件是控制電機的載體,是以單片機為核心組成的電子電氣電路,通過各種傳感器和開關(guān)信號,監(jiān)測判斷駕駛員的意圖和汽車的運行狀況,通過控制策略的邏輯判斷,輸出控制信號,完成對電機的控制,同時,還要實現(xiàn)數(shù)據(jù)通信和對關(guān)鍵元器件的保護功能。
電機控制器整體框圖如圖1所示,該控制器由輸入裝置、單片機和輸出裝置組成。輸入裝置由加速踏板位置傳感器、電機溫度傳感器、驅(qū)動器溫度傳感器、電機電流檢測器、蓄電池電壓檢測器、電機轉(zhuǎn)速傳感器、點火開關(guān)和擋位開關(guān)等組成;輸出裝置是由驅(qū)動器、指示燈等設(shè)備組成。單片機選擇飛思卡爾S9KEA128P80M48SF0處理器,該處理器是飛思卡爾半導(dǎo)體公司最近新出的電機控制微處理器,是一種高性能、低功耗電機32位微處理器。該處理器運行速度快、功耗低、抗干擾能力強、可靠性及性價比高,內(nèi)部集成了 PWM 信號產(chǎn)生電路,其輸出的 PWM 信號可靈活控制電機,應(yīng)用廣泛。

圖1 電機控制器整體框圖
2 電機控制器的傳感器及其處理電路
2.1 加速踏板位置傳感器處理電路
加速踏板位置傳感器是采用兩個接觸式的滑動電位器,每個滑動電位器是由電阻和滑動觸點組成,電阻固定,滑動觸點隨加速踏板一起運動,滑動到不同的位置對應(yīng)不同的電阻,從而產(chǎn)生不同的電壓,由兩個滑動電位器組成的加速踏板位置傳感器隨加速踏板的開度同步線性變化,兩個輸出信號為2倍關(guān)系,提高了踏板冗余度。圖2(a)為加速踏板位置傳感器內(nèi)部電路圖,圖2(b)為兩個輸出信號隨踏板開度的線性變化圖。

圖2 加速踏板位置傳感器
圖3為信號輸出P1的加速踏板位置傳感器處理電路,圖中電阻R1、C1與運算放大器LM324組成有源低通濾波器,濾除度高頻信號干擾,其截止頻率為:

根據(jù)式(1)計算,R1的電阻值選取1K,C1的容量選取1uF,所以該濾波器的截止頻率為159.235HZ,運算放大器LM324輸出信號的一部分反饋回其負輸入端,組成了電壓跟隨器,既隔離了輸入端和輸出端,又具有低阻抗,滿足微處理器的輸入要求。穩(wěn)壓二極管D1選取穩(wěn)壓值為4.5V的IN4747,與電阻R2、C2組成穩(wěn)壓電路,防止瞬間電壓超過5V而損壞單片機內(nèi)部的A/D模數(shù)轉(zhuǎn)換器。
圖3 加速踏板位置傳感器處理電路
2.2 電機溫度和驅(qū)動器溫度采樣電路
電機和驅(qū)動器的溫度過高會影響器件性能的正常發(fā)揮,甚至損壞元器件,因此需要溫度傳感器采樣溫度信號,溫度傳感器是由負溫度系數(shù)熱敏電阻制作而成,該電阻是由具有半導(dǎo)體特性的金屬氧化物組成,本文針對NTSD1XH103F型負溫度系數(shù)熱敏電阻進行研究,它在某一溫度點對應(yīng)的電阻RT的阻值公式如下:
式(2)中:
RT為周圍溫度(絕對溫度)在T時的電阻值;
RN為周圍溫度在TN時的電阻值;
B 為熱敏電阻的材料常數(shù)。
根據(jù)公式計算,該熱敏電阻在-50℃至250℃范圍內(nèi)的電阻值如圖4所示,由圖可知,溫度為-20℃---130℃區(qū)間,電阻值與溫度接近線性關(guān)系,滿足監(jiān)測電機和驅(qū)動器溫度的要求。圖5所示為其中一組的溫度采樣處理電路,電阻R1起分壓作用,電容C11起濾波作用,端口output將信號電壓送至單片機的A/D模數(shù)轉(zhuǎn)換模塊。熱敏電阻安裝在電機接線端子附近,另一個熱敏電阻安裝在驅(qū)動器的功率管散熱片上。

圖4 電阻值與溫度接近線性關(guān)系

圖5 溫度采樣處理電路
2.3 電機電流采樣電路
為了避免電機電流過大而損壞線圈繞組,需要對電機電流進行檢測,本文選取ACS772霍爾電流傳感器,該傳感器是應(yīng)用霍爾效應(yīng)制作的傳感器。霍爾效應(yīng)原理是將一塊長為l、寬度為b、厚度為d的半導(dǎo)體薄片置于磁感應(yīng)強度為B的磁場(磁場方向垂直于薄片大面)中,如圖6所示,當有電流I流過半導(dǎo)體薄片時,在垂直于電流和磁場的方向上將產(chǎn)生電動勢EH,電動勢EH表達式[2]為:

式中:RH為霍爾系數(shù),與材料本身的載流子濃度有關(guān);I為電流;B為磁感應(yīng)強度;d為霍爾元件的厚度。

式(4)中KH為霍爾元件靈敏度系數(shù),它與材料的摻雜濃度和幾何尺寸有關(guān)。根據(jù)公式(4)可得出以下結(jié)論:
①若I不變,B變化,EH將正比于磁感應(yīng)強度B;
②若B不變,I變化,EH將正比于電流I;
③若I變化,B變化,EH將正比于磁感應(yīng)強度B和電流I的乘積。
ACS772霍爾電流傳感器是利用結(jié)論②的原理制作的,它是汽車級別的200KHz頻率帶寬的電流傳感器IC,主要由靠近芯片表面銅制電流通路和精確的低偏置線性霍爾感應(yīng)電路等組成,被測的電機電流流經(jīng)由引腳IP+與IP-的銅制電流通路后會產(chǎn)生磁場(如圖7(a)所示),該磁場能夠被片內(nèi)的霍爾IC感應(yīng)出來并將其轉(zhuǎn)化為成比例的電壓信號,該電壓與被測電流的關(guān)系如圖7(b)所示。該傳感器在25℃時,電流與感應(yīng)電壓呈最精確的線性關(guān)系,它采用5V供電,它對電機的電流檢測范圍是:50A---400A,其導(dǎo)電路徑內(nèi)部電阻僅為 100μΩ,功率損耗極低,滿足對電機的檢測需求。

圖6 霍爾效應(yīng)原理

圖7 霍爾電流傳感器及特性圖
圖8為電機電流采樣電路,由運算放大器LM321組成的反向比例運算放大器對霍爾電流傳感器輸出的電壓信號進行放大,以滿足微處理器中的A/D轉(zhuǎn)換器的信號輸入要求。霍爾電流傳感器輸出的電壓信號通過電阻RF送入運算放大器的反向輸入端,經(jīng)放大后反相輸出,輸出信號的一部分經(jīng)反饋電阻R3反饋給運算放大器的反向輸入端,形成閉環(huán)控制,以增加輸出信號和輸入信號的線性關(guān)系,增強運算放大器的工作穩(wěn)定,輸出信號和輸入信號比例關(guān)系可由公式計算:
流過RF的電流:
IF= (VIOUT-V-) / RF(5)
流過R3的電流:
IR3= (V--Vout) / R3(6)
由于反相比例運算放大器具有“虛短”的特點,所以

求解上面(5)(6)(7)(8)中的代數(shù)方程得:

由此可見,輸出信號和輸入信號的放大倍數(shù)關(guān)系為21.5 -0.3VIOUT。可滿足微處理器對電機電流采樣電路的需求。
圖8 為電機電流采樣電路
2.4 電機轉(zhuǎn)速采樣電路
對電機的轉(zhuǎn)速進行檢測可應(yīng)用霍爾轉(zhuǎn)速傳感器、光電轉(zhuǎn)速傳感器、磁電轉(zhuǎn)速傳感器。由于霍爾轉(zhuǎn)速傳感器有結(jié)構(gòu)牢固、體積小、重量輕、壽命長、安裝方便等優(yōu)點,因此本文對霍爾轉(zhuǎn)速傳感器及其采樣電路進行分析研究。

圖9 霍爾轉(zhuǎn)速傳感器結(jié)構(gòu)
霍爾轉(zhuǎn)速傳感器是根據(jù)霍爾效應(yīng)原理制作的開關(guān)型傳感器,如圖9所示,它將磁性轉(zhuǎn)盤的輸入軸與電機輸出軸相連,磁性轉(zhuǎn)盤跟隨電機輸出軸轉(zhuǎn)動,固定在磁性轉(zhuǎn)盤附近的霍爾開關(guān)集成傳感器便可在每一個小磁鐵通過時產(chǎn)生一個相應(yīng)的脈沖(開關(guān)),檢測出單位時間的脈沖(開關(guān))數(shù),便可知道電機輸出軸的轉(zhuǎn)速,磁性轉(zhuǎn)盤上的小磁鐵數(shù)目的多少,將決定傳感器的分辨率,其頻率和轉(zhuǎn)速成正比。脈沖信號的周期與電機的轉(zhuǎn)速有以下關(guān)系[3]:

式(9)中,n為電機輸出軸轉(zhuǎn)速;P為電機輸出軸轉(zhuǎn)一圈的脈沖數(shù);T為脈沖信號的周期。
根據(jù)式(9)即可計算出電機的轉(zhuǎn)速,本文以型號為SS3144霍爾開關(guān)傳感器作為研究對象,它是由電壓調(diào)節(jié)器(Voltage Regulator)、霍爾片(Hall Plate)、運算放大器(Chopper)、斯密特觸發(fā)器組成。其功能框圖如圖11(a)所示,霍爾片感應(yīng)出來的電壓經(jīng)過運算放大器放大后,再利用斯密特觸發(fā)器的遲滯特性,增加抗干擾能力,其特性如圖10(b)所示,當磁性轉(zhuǎn)盤的磁感應(yīng)強度超過Bop時,傳感器輸出低電平,當磁感應(yīng)強度降到BOP以下時,其輸出的電平不變,直到磁感應(yīng)強度降到BRP時,傳感器才由低電平跳變?yōu)楦唠娖剑珺OP與BRP之間的滯后使開關(guān)動作更為可靠。
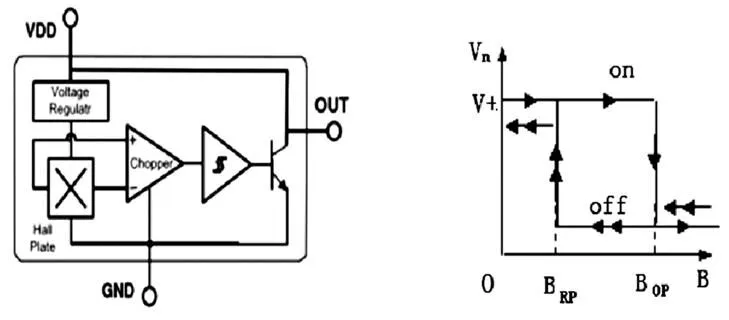
(a)霍爾轉(zhuǎn)速傳感器功能圖 (b)霍爾轉(zhuǎn)速傳感器特性圖
霍爾轉(zhuǎn)速傳感器采樣電路如圖11所示,由霍爾轉(zhuǎn)速傳感器輸出的轉(zhuǎn)速信號經(jīng)過電阻 R2限流后,將脈沖信號送入到微處理器中配置為捕捉模式的I/O端口,電路中二極管D1防止轉(zhuǎn)速脈沖信號的反向擊穿,R1為上拉電阻,電容C1起濾波作用,穩(wěn)壓二極管D2是將輸出信號的幅值穩(wěn)定在4.7V,防止輸出信號過高損壞微處理器。
2.5 開關(guān)采樣電路
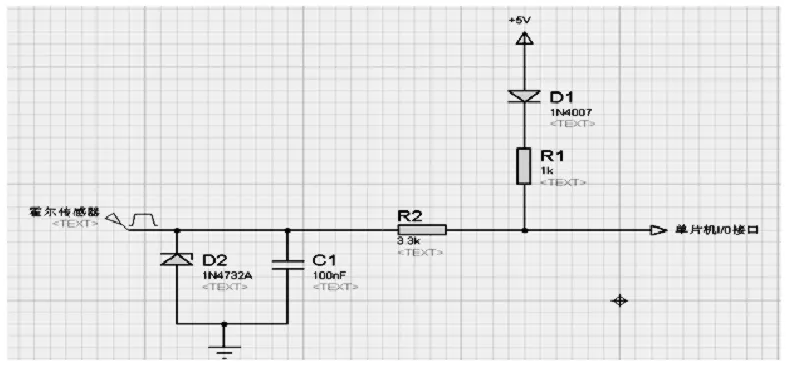
圖11 霍爾轉(zhuǎn)速傳感器采樣電路
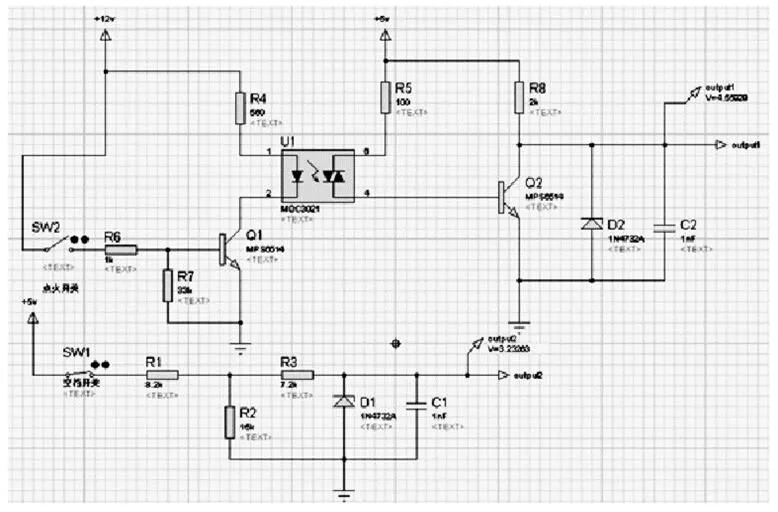
圖12 開關(guān)采樣電路
幵關(guān)信號有檔位信號、點火開關(guān)、駐車信號、車門狀態(tài)等,分兩類:一類是由電機控制器提供的5V電源,另一類是蓄電池提供的12V電源。5V電壓電源符合微處理器 I/O 口的電壓要求,12V電壓電源需要進行電氣隔離及電平轉(zhuǎn)換,如圖12所示,點火開關(guān)SW2開關(guān)信號是由12V電源供電,因此需經(jīng)過由三極管Q1、Q2和光電隔合器MOC3021等組成的隔離電路進行電氣隔離,再通過并聯(lián)在輸出端穩(wěn)壓二極管 D2將信號電壓穩(wěn)定在 4.7V,防止電電壓過高或者瞬間電壓過高而損失微處理器,電容 C2起濾波作用。空擋開關(guān)SW1開關(guān)信號是由5V電源供電,通過R1、R2分壓電阻分壓,R3電阻限流后輸出,穩(wěn)壓二極管 D1和電容 C1的作用與D2和C2的作用相同。
2.6 蓄電池電壓采樣電路
防止蓄電池使用過度,影響電池壽命,需要采樣蓄電池電壓,或蓄電池電量不能滿足純電坳汽車行駛要求,控制器禁止PWM信號輸出,控制電機停止工作從而保護電機,蓄電池電壓采樣電路與溫度傳感器采樣處理電路原理相同,不再論述。
3 電機轉(zhuǎn)速控制策略
由直流電機的基本原理推導(dǎo)出直流電機轉(zhuǎn)速[4]為:

式中:為電機轉(zhuǎn)速(r/min);為電樞電壓(V);為電樞電流(A);為電樞回路電阻(Ω);K為電動勢常數(shù);為勵磁磁通(Wb)。
由式(10)可得,電機轉(zhuǎn)速n的調(diào)節(jié)可通過改變電樞電壓、電樞回路電阻、勵磁磁通三個量,其中以改變電樞電壓的方式最優(yōu),這種方式能實現(xiàn)無級調(diào)速。而電樞電壓的改變可通過由微處理器控制輸出的PWM(脈寬調(diào)制)信號改變,如圖13所示。
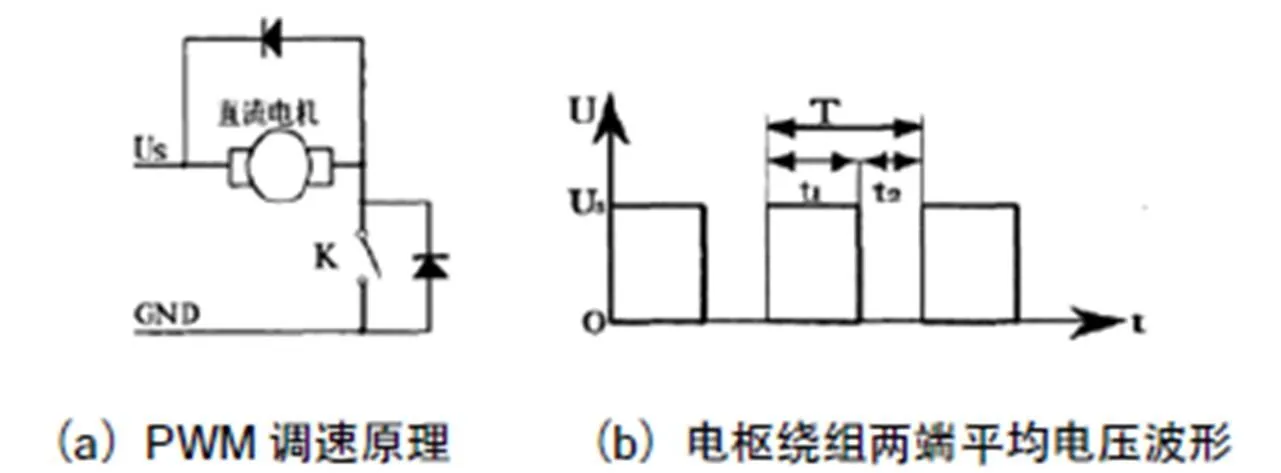
圖13 PWM調(diào)速原理及波形圖
PWM的調(diào)速原理[4]是:施加在電樞繞組兩端平均電壓為:

點火開關(guān)的起動(START)擋接通,并且變速手柄處于P擋或空擋,即控制電機起動,此時電機的轉(zhuǎn)速控制分電動汽車怠速、加速、異常保護三種控制策略決定。
3.1 電動汽車怠速時的電機轉(zhuǎn)速控制策略
點火開關(guān)自動回位至 ON 檔,變速手柄處于P擋或空擋,加速踏板無動作,電機即進入空擋怠速控制模式。微處理器輸出的PWM信號占空比為0.3,目標轉(zhuǎn)速700(RPM),將電機實際轉(zhuǎn)速與預(yù)先設(shè)定的目標轉(zhuǎn)速值進行比較,實現(xiàn)對電機轉(zhuǎn)速的閉環(huán)控制。
3.2 電動汽車加速時的電機轉(zhuǎn)速控制策略
當加速踏板有動作時,加速踏板傳感器及其處理電路輸出的電壓范圍是0.5V到4.5V,設(shè)加速踏板的上下閥值電壓為Vmin = 0.75V和Vmax = 4.35V,定義加速踏板當前電壓為U,則加速踏板的開度百分比P[5]為:



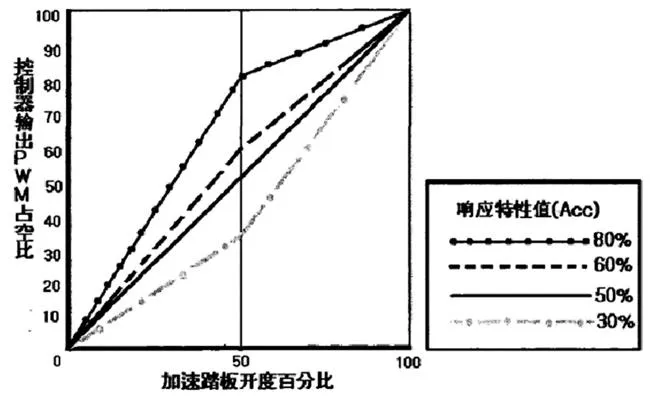
圖14 加速踏板特性響應(yīng)圖
3.3 電動汽車異常保護時的電機轉(zhuǎn)速控制策略
異常保護的電機控制策略是指對電機實行過流與過熱保護,對控制器實行過熱保護和對蓄電池的欠壓保護。
電動汽車運行環(huán)境是惡劣的,會出現(xiàn)瞬間加速、爬坡和電機堵轉(zhuǎn)等大轉(zhuǎn)矩需求情況,此時電機電樞電流會突然增大,導(dǎo)致銅線繞組發(fā)熱而損害電機。根據(jù)式(12)和(13)可推導(dǎo)計算出[5]:

由于轉(zhuǎn)速不能突變,當負載突然增大時,根據(jù)電機的最大允許電流,則可依據(jù)式(16)計算出下一時刻最大允許占空比,該占空比作為與據(jù)式(15)計算得到的占空比的限值,使控制電樞電流不超過限值,從而保護電機不會因過流而損壞。
過熱保護控制包括電機過熱保護和控制器過熱保護。電機過載會使電機發(fā)熱量會急劇增加,為了避免燒毀電機,通過限制電機超額運行的時間或者根據(jù)電機溫度來限定其扭矩輸出。當電機溫度傳感器檢測溫度過高,限制或減少電機扭矩的輸出。當電機溫度高于75℃,禁止 PWM 信號輸出,直到電機溫度小于 75℃,恢復(fù)正常運行狀態(tài),當控制器溫度大于 80℃時禁止 PWM 信號輸出,當溫度低于 80℃時恢復(fù)正常運行。蓄電池欠壓保護是采取實時響應(yīng),每隔10ms采樣蓄電池電壓,并與預(yù)設(shè)的極值進行比較,當電壓低于設(shè)定最小保護值時,若超過設(shè)定時間,則認為故障,禁止PWM 信號輸出。
4 仿真試驗及分析
加速踏板位置傳感器處理電路通過Proteus電路仿真軟件進行仿真,其電路性能如圖15所示,性能良好。
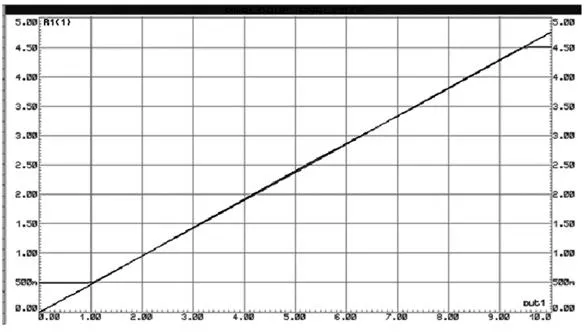
圖15 加速踏板處理電路輸入與輸出信號的關(guān)系

圖16 加速踏板控制的可調(diào)PWM信號模塊

圖17 電機驅(qū)動模塊
利用Matlab Simulink軟件建立加速踏板控制電機轉(zhuǎn)速模型,該模型由加速踏板控制的可調(diào)PWM信號模塊(如圖16所示)和電機驅(qū)動模塊(如圖17所示)組成。
設(shè)置加速踏板加速踏板特性響應(yīng)值為75%,加速踏板采樣處理電路電壓從0.5V到4.5V變化時,其輸出曲線圖如圖18(a)所示,經(jīng)過式(1-15)變換得出的PWM信號如圖18(b)所示,圖19為受的PWM信號控制的電機正反轉(zhuǎn)的轉(zhuǎn)速、電樞電流和負載的仿真曲線圖。由此圖看出本文的控制策略能夠獲得隨加速踏板開度變化穩(wěn)定的轉(zhuǎn)速。

圖18 加速踏板采樣處理電路電壓變化及PWM信號圖

圖19 電機正反轉(zhuǎn)的轉(zhuǎn)速、電樞電流和負載的仿真曲線圖
5 結(jié)論
本文中研究基于純電動汽車電機控制器的加速踏板位置傳感器及其處理電路、電機和控制器溫度傳感器及其處理電路、電機電流檢測及其處理電路、蓄電池電壓檢測及其處理電路、電機轉(zhuǎn)速傳感器及其處理電路等關(guān)鍵技術(shù),所提出的電機控制策略在直流電機轉(zhuǎn)速控制中可靠,具有廣泛的應(yīng)用前景。
[1] 孫逢春,程夕明.電動汽車動力驅(qū)動系統(tǒng)現(xiàn)狀及發(fā)展[J].汽車工程, 2000.
[2] 牛彩雯,何成平.傳感器與檢測技術(shù)[M].北京:機械工業(yè)出版社, 2016:89-90.
[3] 霍爾傳感器如何測轉(zhuǎn)速---霍爾傳感器測轉(zhuǎn)速原理.http://www.elec -fans.com/yuanqijian/sensor/20180113615017_a.html.
[4] 伊偉.純電動汽車電機控制器的研究[D].山東:山東大學(xué),2014:19- 20.
[5] 伊偉.純電動汽車電機控制器的研究[D].山東:山東大學(xué),2014:52- 53.
Research On Sensor Processing Circuit And Control Strategy Based OnPure Electric Vehicle Motor Controller
Qi Jinfeng
( Guangzhou Vocational College of Science and Technology, Guangdong Guangzhou 510550 )
With the continuous improvement of people's living standards, the demand for using automobiles as a means of transportation is gradually increasing, and the environmental pollution caused by traditional fuel vehicles is attracting more and more attention. Therefore, new energy vehicles with energy saving and environmental protection have been paid great attention to. Pure electric vehicle (EV) and hybrid electric vehicle (HEV) have been widely used and popularized. Motor controller has become a new research field of new energy vehicle. In this paper, the sensor of motor controller of pure electric vehicle and its processing circuit, motor speed control strategy are studied. Firstly, the composition of DC motor controller is introduced, then the sensor and its processing circuit of DC motor controller are described, and the speed control strategy of DC motor is studied according to the sensing signal.Finally, the control strategy of motor speed is simulated by matlab simulink software, and the result is good.
Motor controller; electric vehicle; control strategy; controller; sensor
U469.7
A
1671-7988(2019)07-14-06
戚金鳳,學(xué)士,講師,就職于廣州科技職業(yè)技術(shù)學(xué)院,從事汽車電子研究工作。
U469.7
A
1671-7988(2019)07-14-06
10.16638/j.cnki.1671-7988.2019.07.004
猜你喜歡
車主之友(2022年6期)2023-01-30 07:58:16
鴨綠江(2021年35期)2021-04-19 12:24:18
能源工程(2020年6期)2021-01-26 00:55:22
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
黃河之聲(2019年23期)2019-12-17 19:08:43
汽車實用技術(shù)(2019年17期)2019-09-21 03:46:32
山東冶金(2019年3期)2019-07-10 00:54:04
消費導(dǎo)刊(2018年10期)2018-08-20 02:57:02
電子制作(2018年11期)2018-08-04 03:25:42
黃河之聲(2017年13期)2017-01-28 13:30:17