兩擋純電動(dòng)汽車傳動(dòng)系統(tǒng)參數(shù)優(yōu)化和試驗(yàn)對(duì)比
2019-04-23 07:32:50盛繼新張邦基金秋談
中國(guó)機(jī)械工程 2019年7期
關(guān)鍵詞:優(yōu)化
盛繼新 張邦基 朱 波 王 明 金秋談
1.湖南大學(xué)汽車車身先進(jìn)設(shè)計(jì)制造國(guó)家重點(diǎn)實(shí)驗(yàn)室,長(zhǎng)沙,4100822.合肥工業(yè)大學(xué)新能源汽車研究院,合肥,230009
0 引言
為提高整車動(dòng)力性,降低驅(qū)動(dòng)電機(jī)和動(dòng)力電池需求,純電動(dòng)汽車傳動(dòng)系統(tǒng)的發(fā)展趨于多擋化[1-2]。國(guó)內(nèi)外關(guān)于電動(dòng)汽車多擋化方向都有相關(guān)的研究,北京理工大學(xué)針對(duì)北京奧運(yùn)電動(dòng)客車開發(fā)了三擋機(jī)械式自動(dòng)變速器(AMT),整車經(jīng)濟(jì)性能提高了9%[3];文獻(xiàn)[4]開發(fā)了純電動(dòng)汽車兩擋雙離合變速器(DTC),電機(jī)平均工作效率提升了3.63%。多擋變速器通過(guò)擋位控制可使整車運(yùn)行在電機(jī)高效工作區(qū)間,提高整車動(dòng)力性和經(jīng)濟(jì)性[5-6]。
純電動(dòng)汽車效率優(yōu)化的關(guān)鍵在于傳動(dòng)系統(tǒng),即實(shí)現(xiàn)動(dòng)力電池組、電機(jī)和變速器擋位的匹配優(yōu)化[7]。目前,研究純電動(dòng)汽車傳動(dòng)系統(tǒng)參數(shù)優(yōu)化的方法主要有遺傳算法和動(dòng)態(tài)規(guī)劃算法。文獻(xiàn)[8]運(yùn)用遺傳算法對(duì)汽車傳動(dòng)系統(tǒng)參數(shù)進(jìn)行優(yōu)化設(shè)計(jì),但考慮工況過(guò)于單一;文獻(xiàn)[9]運(yùn)用多目標(biāo)遺傳算法對(duì)電池單體數(shù)量和單體容量進(jìn)行匹配設(shè)計(jì),但僅限于電池匹配;文獻(xiàn)[10]運(yùn)用全局優(yōu)化遺傳算法匹配混合動(dòng)力汽車電機(jī)和發(fā)動(dòng)機(jī)參數(shù),但未涉及多擋變速器的影響;文獻(xiàn)[11]運(yùn)用全局動(dòng)態(tài)規(guī)劃算法對(duì)兩擋I-AMT齒輪速比進(jìn)行優(yōu)化,但該算法容易陷入局部最優(yōu)。
針對(duì)上述問題,本文以兩擋DCT純電動(dòng)汽車為設(shè)計(jì)原型,采用兩擋AMT傳動(dòng)系統(tǒng)方案,采用多目標(biāo)遺傳算法匹配優(yōu)化電機(jī)參數(shù),采用全局優(yōu)化遺傳算法優(yōu)化整車傳動(dòng)速比,并與匹配車型和試驗(yàn)車型進(jìn)行對(duì)比驗(yàn)證。
1 傳動(dòng)系統(tǒng)參數(shù)匹配和整車建模
以某純電動(dòng)汽車兩擋DCT傳動(dòng)系統(tǒng)為基礎(chǔ),匹配純電動(dòng)汽車的兩擋AMT傳動(dòng)系統(tǒng),整車參數(shù)和設(shè)計(jì)指標(biāo)見表1。傳動(dòng)系統(tǒng)參數(shù)匹配針對(duì)動(dòng)力系統(tǒng)的主要環(huán)節(jié)進(jìn)行,包括電池、電機(jī)和變速器傳動(dòng)比[12-13]。
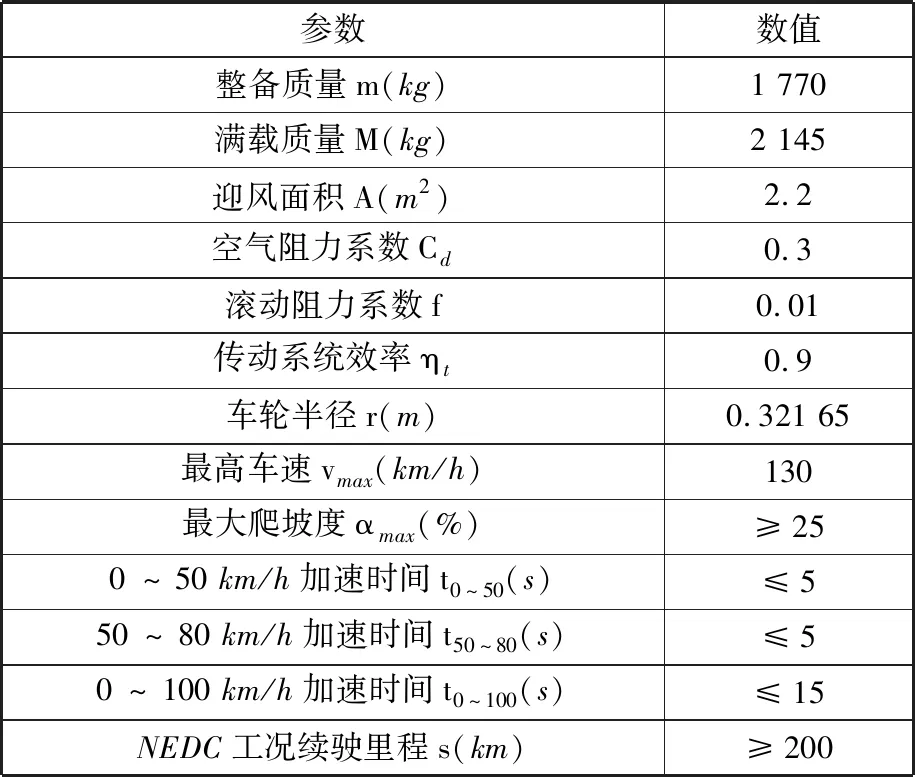
表1 整車參數(shù)及設(shè)計(jì)指標(biāo)
1.1 傳動(dòng)系統(tǒng)參數(shù)匹配
動(dòng)力電池是影響整車?yán)m(xù)駛里程的決定因素,單一NEDC工況電池耗電量的表達(dá)式為
(1)
式中,Ebat為單個(gè)NEDC工況耗電量,kW·h;v為車速,km/h;ηc為逆變器效率,取0.95;ηb為電池組的放電效率,取0.94;g為重力加速度,m/s2;δ為整車旋轉(zhuǎn)質(zhì)量換算系數(shù)。
達(dá)到整車?yán)m(xù)駛里程要求時(shí)電池總?cè)萘繛?/p>
(2)
式中,E為滿足單次充電續(xù)駛里程所需的電池總?cè)萘浚琸W·h;S為單次充電整車?yán)m(xù)駛里程,km;η為電池放電深度,取0.85。
電動(dòng)汽車驅(qū)動(dòng)電機(jī)要求在加速或爬坡時(shí)提供大扭矩,高速行駛時(shí)提供大功率[14],電機(jī)匹配參數(shù)包括峰值功率、額定功率和峰值扭矩。
電機(jī)峰值功率表征汽車行駛的后備功率,峰值功率
Pp≥max(Pvmax,Ptmax,Pαmax)
(3)
式中,Pvmax為滿足最高車速時(shí)所需功率;Ptmax為滿足加速時(shí)間所需功率;Pαmax為滿足最大爬坡度時(shí)所需功率。
根據(jù)我國(guó)高速工況的設(shè)計(jì)要求,電機(jī)額定功率須滿足車速為120 km/h勻速巡航要求,電機(jī)峰值扭矩應(yīng)滿足整車爬坡性能要求。
傳動(dòng)速比匹配的關(guān)鍵在于計(jì)算其可行域。最大傳動(dòng)比igmax須滿足最大爬坡度要求和道路附著條件約束:
iα≤igmax≤ia
(4)
式中,iα為滿足最大爬坡度時(shí)的傳動(dòng)比;ia為滿足附著條件時(shí)的傳動(dòng)比。
最小傳動(dòng)比igmin需同時(shí)滿足最高車速要求和最高車速行駛時(shí)電機(jī)處于恒功率區(qū)的約束:
ipmax≤igmin≤ivmax
(5)
式中,ipmax為滿足最高車速行駛時(shí),驅(qū)動(dòng)電機(jī)處于恒功率區(qū)對(duì)應(yīng)的傳動(dòng)比;ivmax為滿足最高車速時(shí)對(duì)應(yīng)的傳動(dòng)比。
經(jīng)計(jì)算,傳動(dòng)系統(tǒng)參數(shù)取值范圍見表2。

表2 匹配參數(shù)指標(biāo)
1.2 傳動(dòng)系統(tǒng)參數(shù)選取
根據(jù)表2匹配結(jié)果,選取電池參數(shù)、電機(jī)參數(shù)和變速器傳動(dòng)速比參數(shù)見表3、表4和表5。
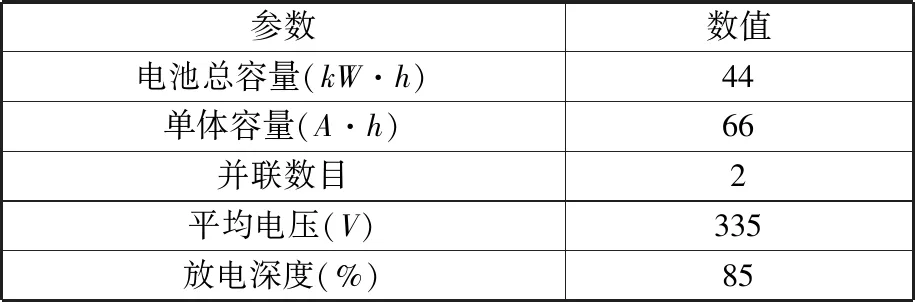
表3 電池參數(shù)選取
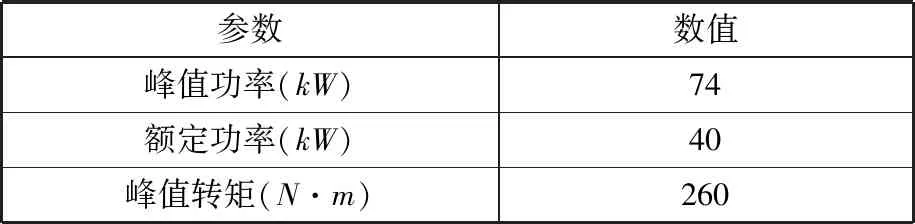
表4 電機(jī)參數(shù)初選
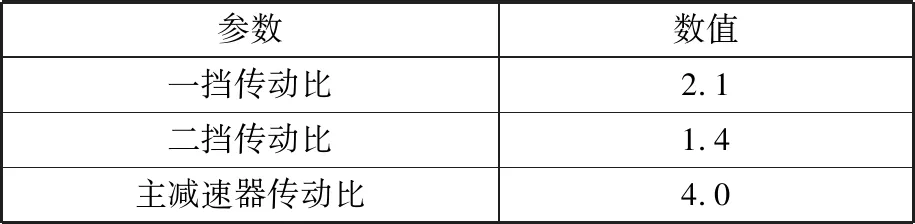
表5 變速器傳動(dòng)速比初選
1.3 整車建模
電動(dòng)汽車參數(shù)選取直接影響整車性能的參數(shù),為確定整車參數(shù),搭建了整車模型。整車模型包括電池模型、電機(jī)模型、變速器模型及整車控制模型,圖1為純電動(dòng)汽車兩擋AMT傳動(dòng)系統(tǒng)簡(jiǎn)圖。
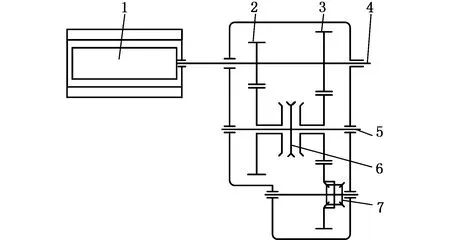
1.電機(jī) 2.一擋齒輪 3.二擋齒輪 4.輸入軸 5.輸出軸 6.同步器 7.主減速器和差速器圖1 兩擋純電動(dòng)汽車傳動(dòng)系統(tǒng)Fig.1 The two-block transmission system of PEV
電池模塊采用內(nèi)阻模型,建立開路電壓V和內(nèi)阻R與電池荷電狀態(tài)(SOC)及溫度的關(guān)系,即
V=Vcell(t,SSOC)B
(6)
R=Rcell(t,SSOC)B
(7)
式中,B為電池串聯(lián)數(shù)量;t為電池溫度;SSOC為電池SOC;Vcell(t,SSOC)為電池單體開路電壓,是電池溫度與SOC的函數(shù)(圖2);Rcell(t,SSOC)為電池單體內(nèi)阻,是電池溫度與SOC的函數(shù)(圖2)。
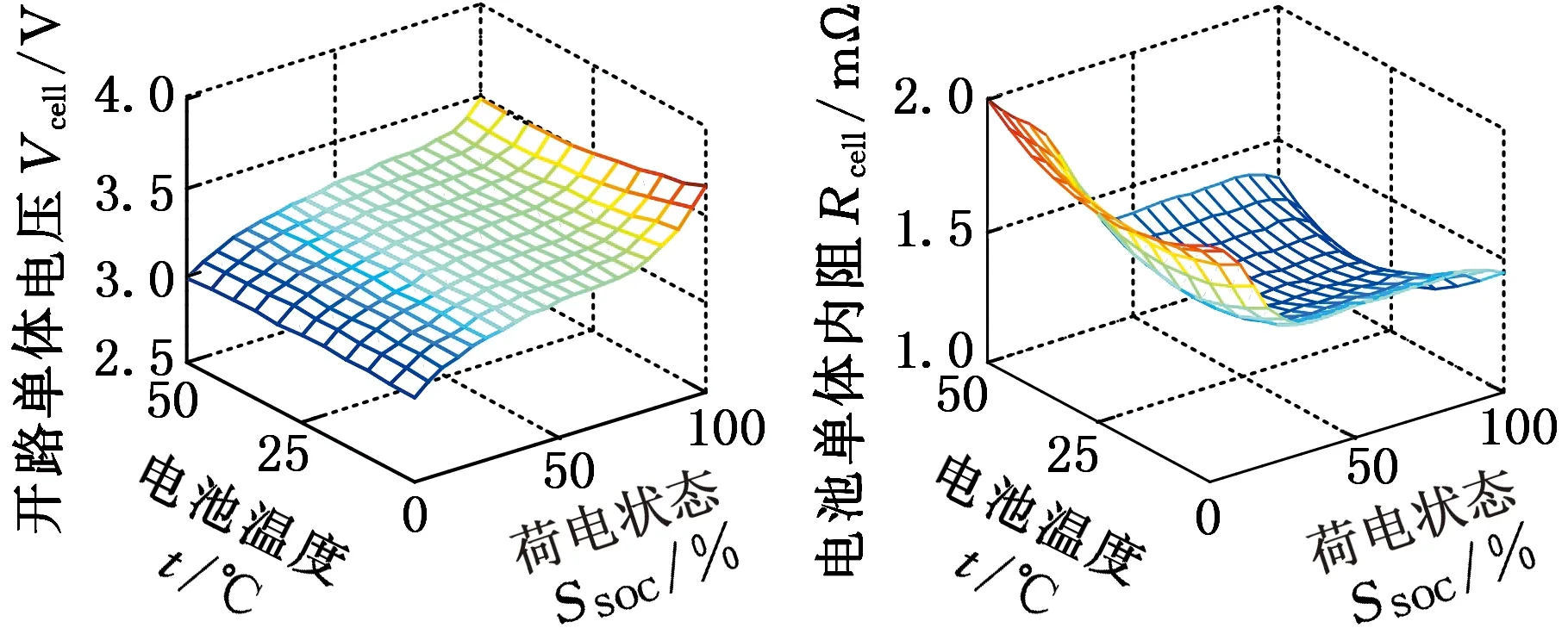
圖2 電池開路電壓函數(shù)曲線與內(nèi)阻函數(shù)曲線Fig.2 The battery open circuit voltage function curveand the internal resistance function curve
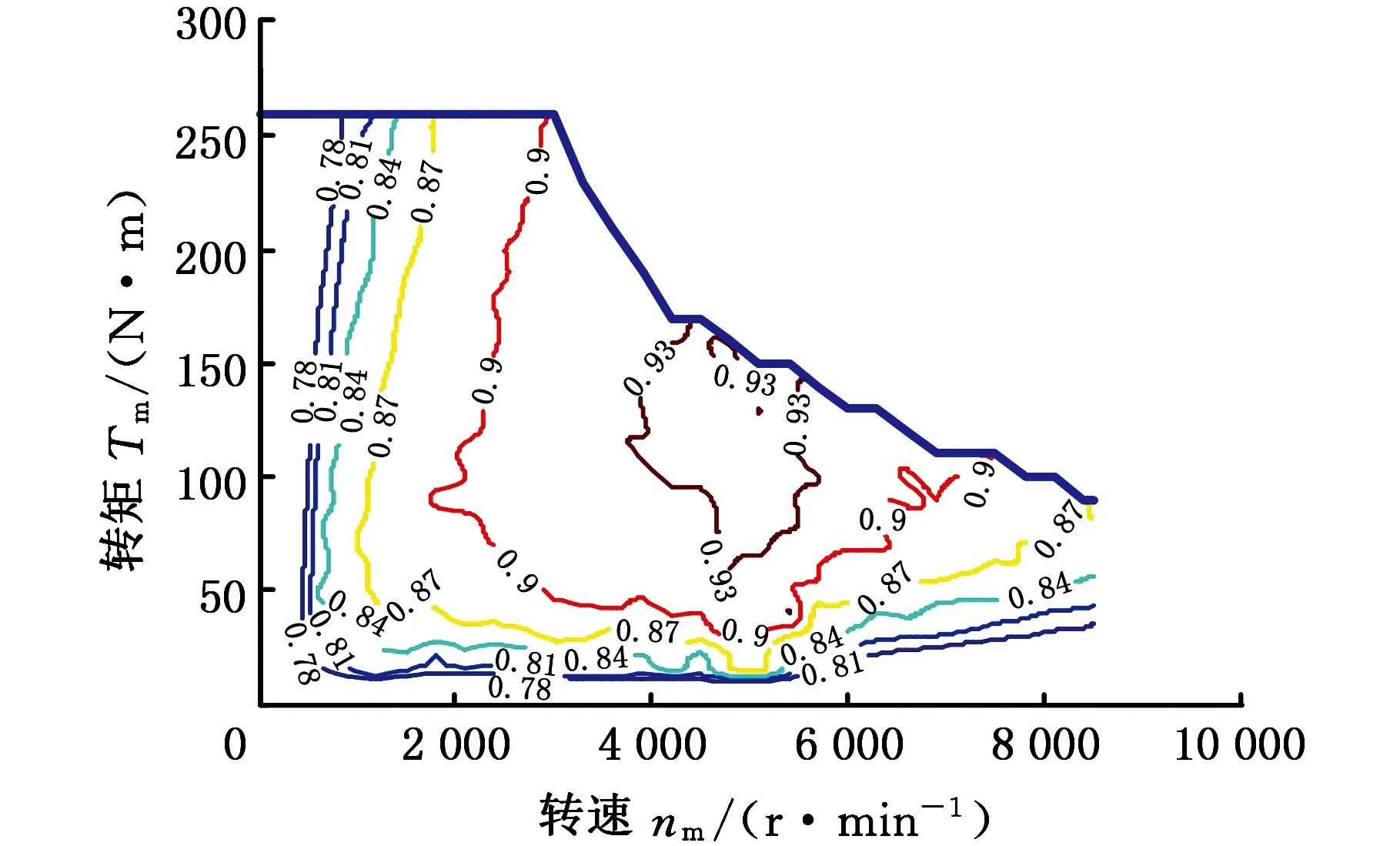
圖3 電機(jī)驅(qū)動(dòng)效率Fig.3 The chart of motor operating efficiency
電池能量經(jīng)逆變器傳到電機(jī),電機(jī)驅(qū)動(dòng)效率見圖3,電機(jī)輸出轉(zhuǎn)矩
(8)
Pm=Tmnm
(9)
式中,nm為電機(jī)轉(zhuǎn)速;ηm為電機(jī)效率;PB為電池功率;Pm為電機(jī)功率。
電機(jī)轉(zhuǎn)矩傳遞到變速器,動(dòng)力傳遞方程表示為
(10)
式中,Jm、Jt分別為電機(jī)轉(zhuǎn)動(dòng)慣量和變速器等效轉(zhuǎn)動(dòng)慣量;it為變速器傳動(dòng)比;θ為輸出軸轉(zhuǎn)角;dt為變速器等效轉(zhuǎn)動(dòng)阻尼;Tf為車輛行駛阻力矩。
變速器輸出轉(zhuǎn)矩經(jīng)主減速器和差速器及半軸傳遞到車輪,整車行駛阻力矩
(11)
式中,ig為傳動(dòng)系統(tǒng)總傳動(dòng)比;α為爬坡度。
2 基于遺傳算法的傳動(dòng)系統(tǒng)參數(shù)優(yōu)化
2.1 遺傳算法優(yōu)化理論
電機(jī)和傳動(dòng)參數(shù)匹配優(yōu)化問題的表達(dá)式為
(12)
式中,J為n個(gè)可優(yōu)化的指標(biāo);J1、J2、…、Jn為優(yōu)化目標(biāo);ig為優(yōu)化變量向量;S為最優(yōu)性能指標(biāo)決定的可行域。
遺傳算法是一種基于進(jìn)化理論的搜索算法[15],該算法能夠精確實(shí)現(xiàn)全局最優(yōu)解,避免優(yōu)化目標(biāo)陷入局部最優(yōu),遺傳算法可表示為
G=(C,J,P0,M,Φ,Γ,Θ,Τ)
(13)
式中,C為個(gè)體編碼的方法;P0、M分別為種群初始值和種群大小;Φ、Γ、Θ分別為選擇算子、交叉算子和變異算子;Τ為終止條件。
2.2 電機(jī)參數(shù)優(yōu)化
電機(jī)峰值功率和峰值扭矩決定了整車動(dòng)力性。將電機(jī)峰值功率和峰值轉(zhuǎn)矩分3組,見表6。

表6 電機(jī)選型分組
以電機(jī)峰值功率和峰值轉(zhuǎn)矩為綜合設(shè)計(jì)目標(biāo),以整車動(dòng)力性指標(biāo)為約束條件,運(yùn)用多目標(biāo)遺傳算法優(yōu)化電機(jī)參數(shù)。圖4為多目標(biāo)遺傳算法優(yōu)化策略流程圖。首先,隨機(jī)產(chǎn)生滿足要求的N個(gè)個(gè)體初始種群Pm(0)和Tm(0),得到子代種群;其次,計(jì)算適應(yīng)度目標(biāo)函數(shù),判定終止條件要求,完成復(fù)制、選擇、交叉、變異;最后,判定動(dòng)力性限定條件,迭代更新,若均滿足要求,停止迭代,獲取電機(jī)參數(shù)。
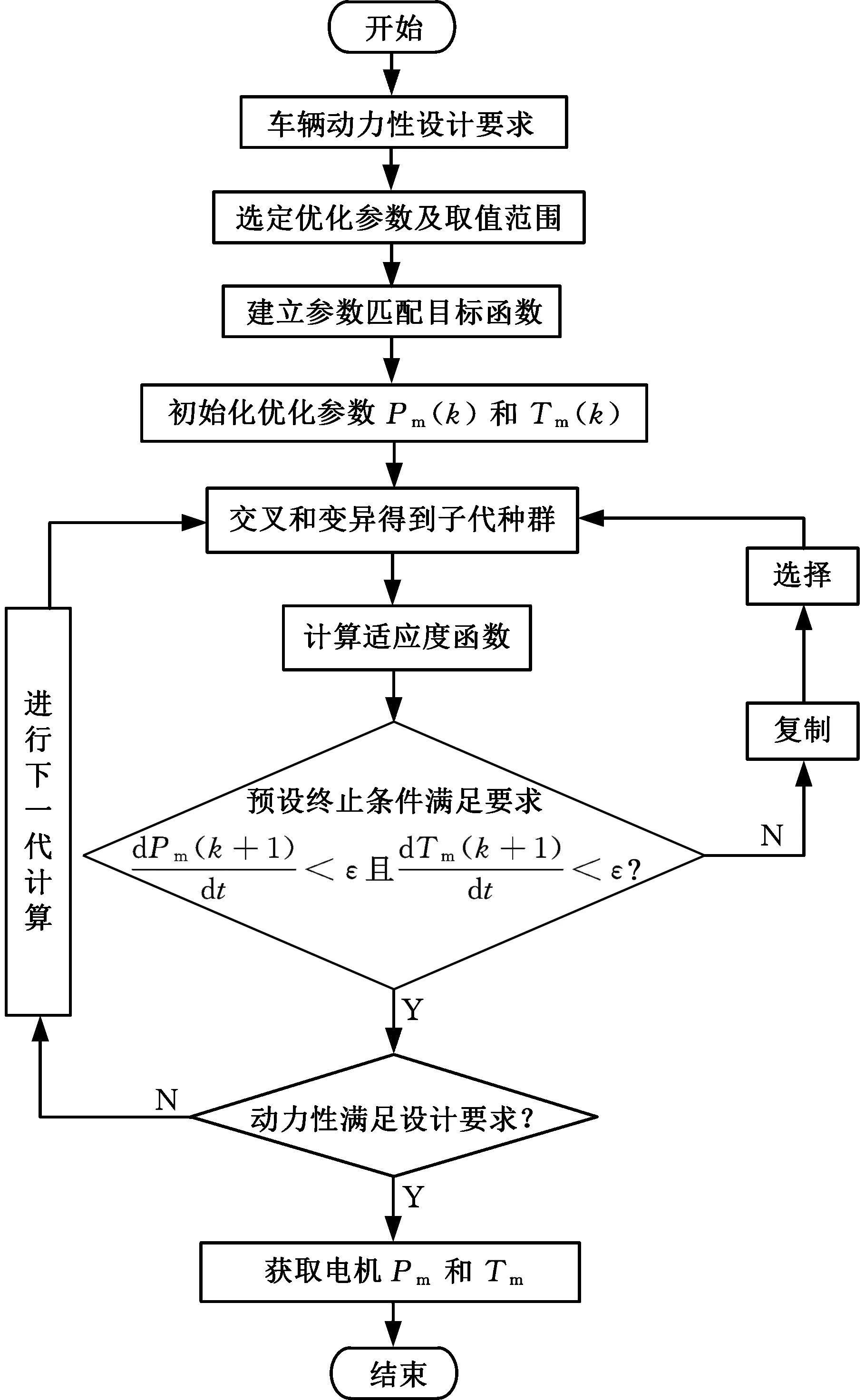
圖4 多目標(biāo)遺傳算法優(yōu)化策略Fig.4 Multi-objective GA optimization strategy
根據(jù)設(shè)計(jì)指標(biāo)要求,確定優(yōu)化目標(biāo)函數(shù)為
(14)
整車動(dòng)力性的約束如下:
(15)
式中,F(xiàn)t為驅(qū)動(dòng)力,N;Ff為滾動(dòng)阻力,N;Fw為空氣阻力,N;i0為主減速器傳動(dòng)比;ix(x=1,2)為擋位傳動(dòng)比。
圖5所示為三組電機(jī)特征。第一組電機(jī)的峰值功率和峰值轉(zhuǎn)矩相應(yīng)的動(dòng)力性能結(jié)果見表7。表7結(jié)果表明,50~80 km/h加速時(shí)間無(wú)法滿足要求,整車動(dòng)力性不足。電機(jī)峰值功率確定后,不是峰值轉(zhuǎn)矩越大,整車動(dòng)力性越強(qiáng),因?yàn)殡姍C(jī)峰值轉(zhuǎn)矩越大,額定轉(zhuǎn)速越小,電機(jī)進(jìn)入恒功率區(qū)的時(shí)間加快,電機(jī)扭矩下降的時(shí)間提前,整車動(dòng)力性反而略有下降。第二組電機(jī)峰值功率和峰值轉(zhuǎn)矩相應(yīng)動(dòng)力性能結(jié)果見表8。表8結(jié)果表明,為滿足動(dòng)力性設(shè)計(jì)指標(biāo),若匹配電機(jī)峰值功率為74.02 kW,對(duì)應(yīng)電機(jī)的峰值轉(zhuǎn)矩應(yīng)不小于263.2 N·m。第三組電機(jī)峰值功率和峰值扭矩相應(yīng)動(dòng)力性能結(jié)果見表9。表9結(jié)果顯示,為滿足動(dòng)力性設(shè)計(jì)指標(biāo),若匹配電機(jī)峰值功率為75.3 kW,對(duì)應(yīng)電機(jī)的峰值轉(zhuǎn)矩應(yīng)不小于221 N·m。
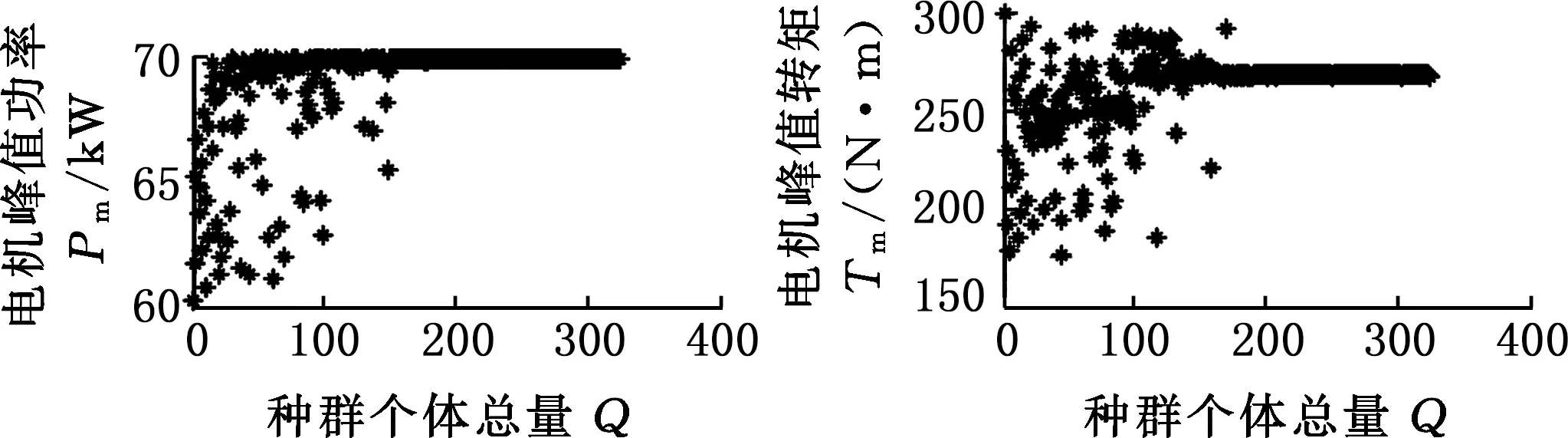
(a)第一組電機(jī)特征
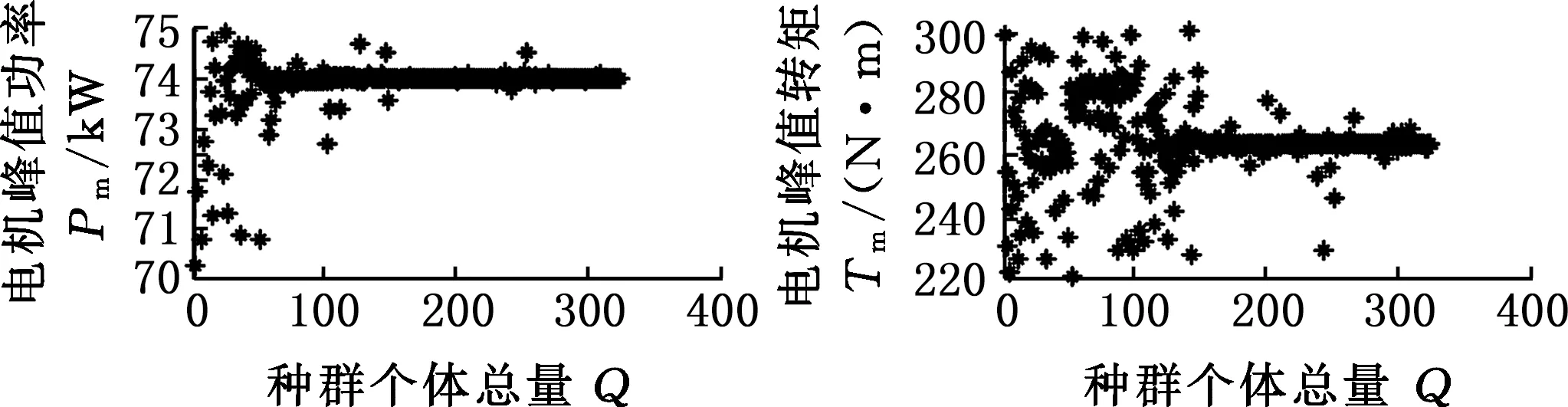
(b)第二組電機(jī)特征

(c)第三組電機(jī)特征圖5 電機(jī)特征Fig.5 The characteristics of motor
綜合上述分析結(jié)果,同時(shí)考慮整車其他附件能耗及現(xiàn)有電機(jī)產(chǎn)品,最終確定的電機(jī)參數(shù)見表10。

表7 第一組電機(jī)動(dòng)力性能
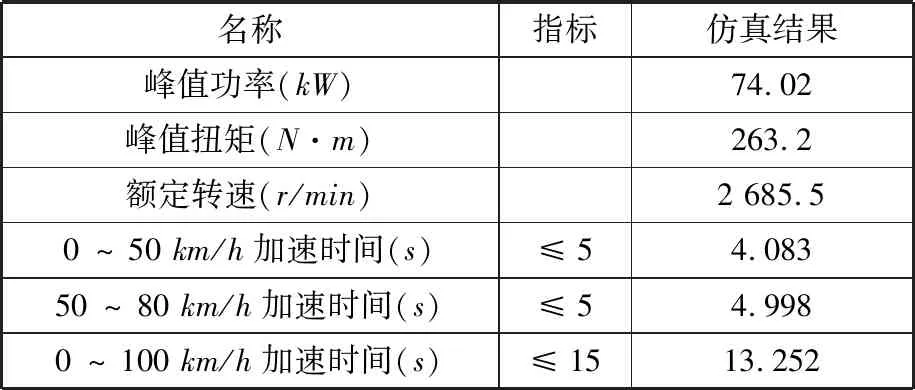
表8 第二組電機(jī)動(dòng)力性能

表9 第三組電機(jī)動(dòng)力性能
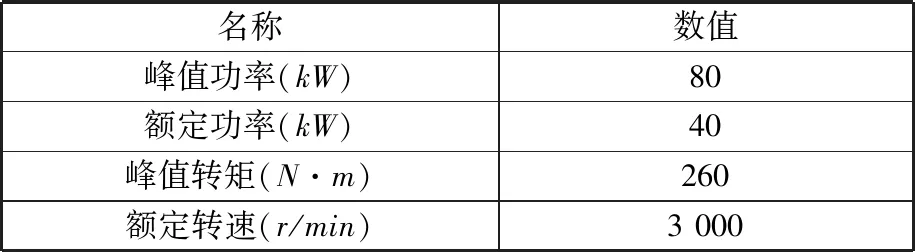
表10 電機(jī)參數(shù)選擇
2.3 齒輪速比優(yōu)化
齒輪速比是影響整車性能的關(guān)鍵因素,在電池參數(shù)和電機(jī)參數(shù)確定后,選擇不同的傳動(dòng)比可使整車具有不同的動(dòng)力性和經(jīng)濟(jì)性。
電機(jī)在不同轉(zhuǎn)速和不同扭矩工作下對(duì)應(yīng)的功率損失見圖6。整車經(jīng)濟(jì)性取決于運(yùn)行工況中全局能量損耗,損耗越小,整車經(jīng)濟(jì)性越好,因此,整車能量?jī)?yōu)化問題可轉(zhuǎn)化為全局能量損耗最小問題。
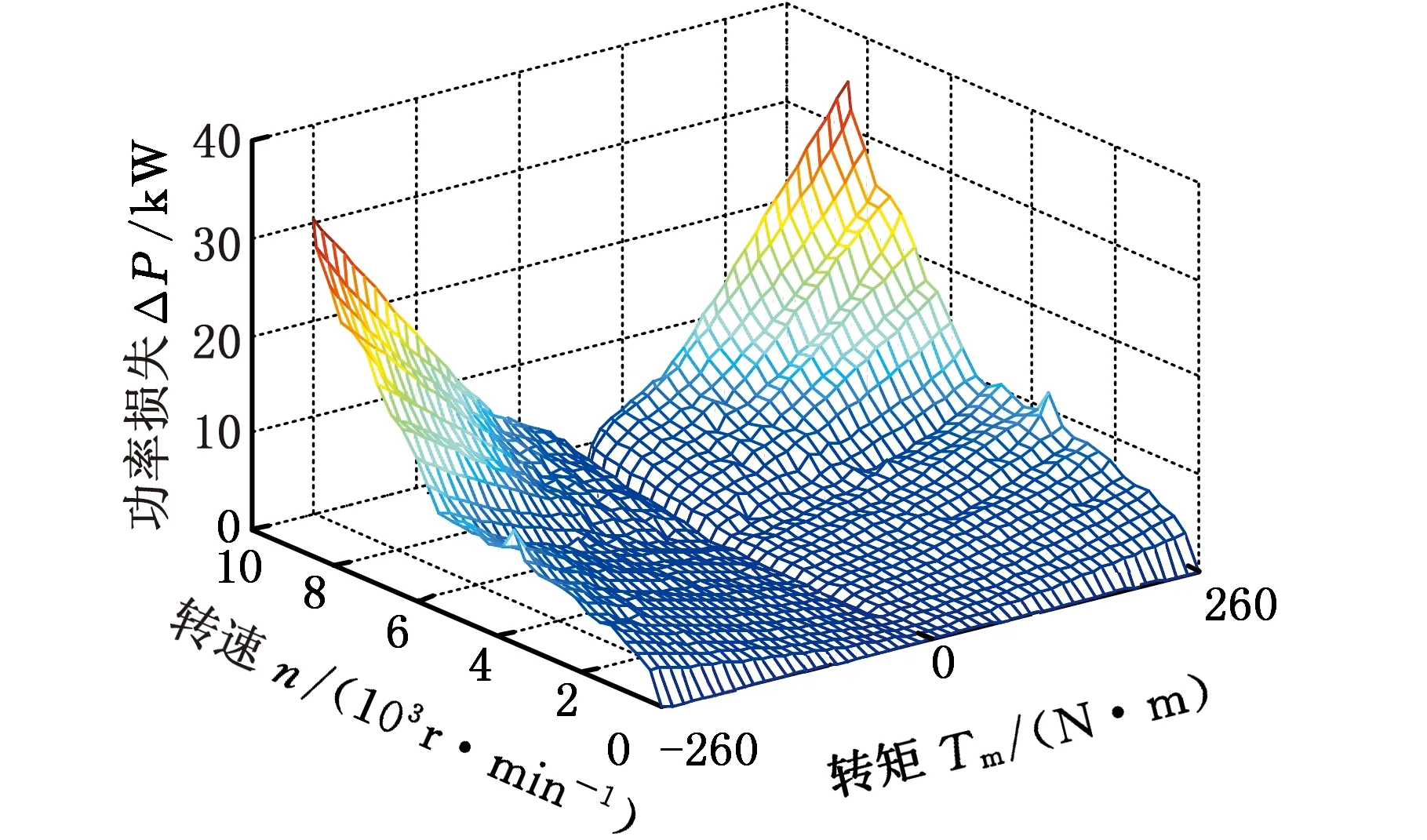
圖6 電機(jī)驅(qū)動(dòng)功率損失Fig.6 The motor drive power loss
齒輪速比優(yōu)化是一個(gè)多目標(biāo)、多變量?jī)?yōu)化問題,優(yōu)化目標(biāo)分為最大動(dòng)力性和最佳經(jīng)濟(jì)性,整車經(jīng)濟(jì)性直接影響匹配電池的容量和續(xù)駛里程。由此,在滿足動(dòng)力性限制條件的基礎(chǔ)上,選擇綜合路況下的經(jīng)濟(jì)性指標(biāo)為優(yōu)化目標(biāo)函數(shù),可將多目標(biāo)優(yōu)化問題轉(zhuǎn)化為單目標(biāo)優(yōu)化問題。
整車動(dòng)力性和經(jīng)濟(jì)性的關(guān)鍵因素包括整車傳動(dòng)速比和在不同工況下的綜合換擋控制策略,因此,最終選擇設(shè)計(jì)參數(shù)為x=(x1,x2,x3,x4)=(i1,i2,i0,v) 。
目標(biāo)函數(shù)的選取應(yīng)使傳動(dòng)系統(tǒng)平均功率最高、整車功率損失最小、電池綜合工況耗電量最小,因此設(shè)計(jì)目標(biāo)函數(shù)為
(16)
式中,fobj為單位里程耗電量,W·h/m;N1、N2分別為NEDC工況和HWFET工況的采樣點(diǎn)總數(shù);ΔS1、ΔS2分別為單位采樣時(shí)間內(nèi)NEDC工況與HWFET工況下電池剩余電量的變化量。
為滿足整車動(dòng)力性要求,將整車動(dòng)力性指標(biāo)作為能量?jī)?yōu)化的限制條件。純電動(dòng)汽車兩擋傳動(dòng)比之比不應(yīng)大于2.5,超過(guò)會(huì)影響整車的平順性[16],考慮到齒輪效率,主減速器傳動(dòng)比不應(yīng)小于4[11]。由此,整車傳動(dòng)比限制條件為
(17)
圖7所示為遺傳算法優(yōu)化控制策略流程。首先,隨機(jī)產(chǎn)生滿足要求的初始種群個(gè)體i0、i1和i2,不斷復(fù)制、選擇、交叉與變異,計(jì)算適應(yīng)度函數(shù);其次,判定終止條件,若滿足,迭代停止;最后,獲得滿足全局能量最優(yōu)的齒輪速比。
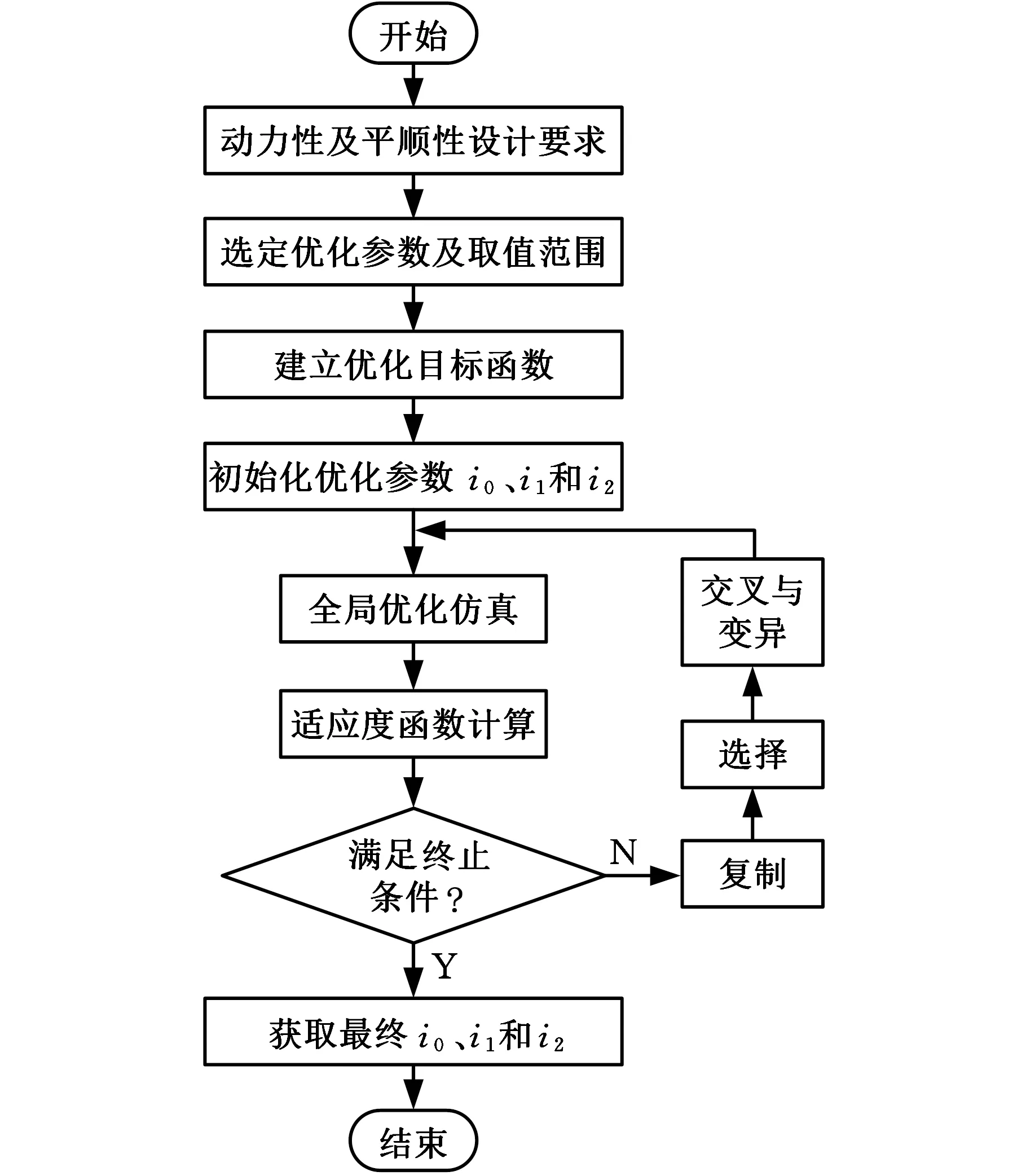
圖7 遺傳算法優(yōu)化策略Fig.7 The genetic algorithm optimization strategy
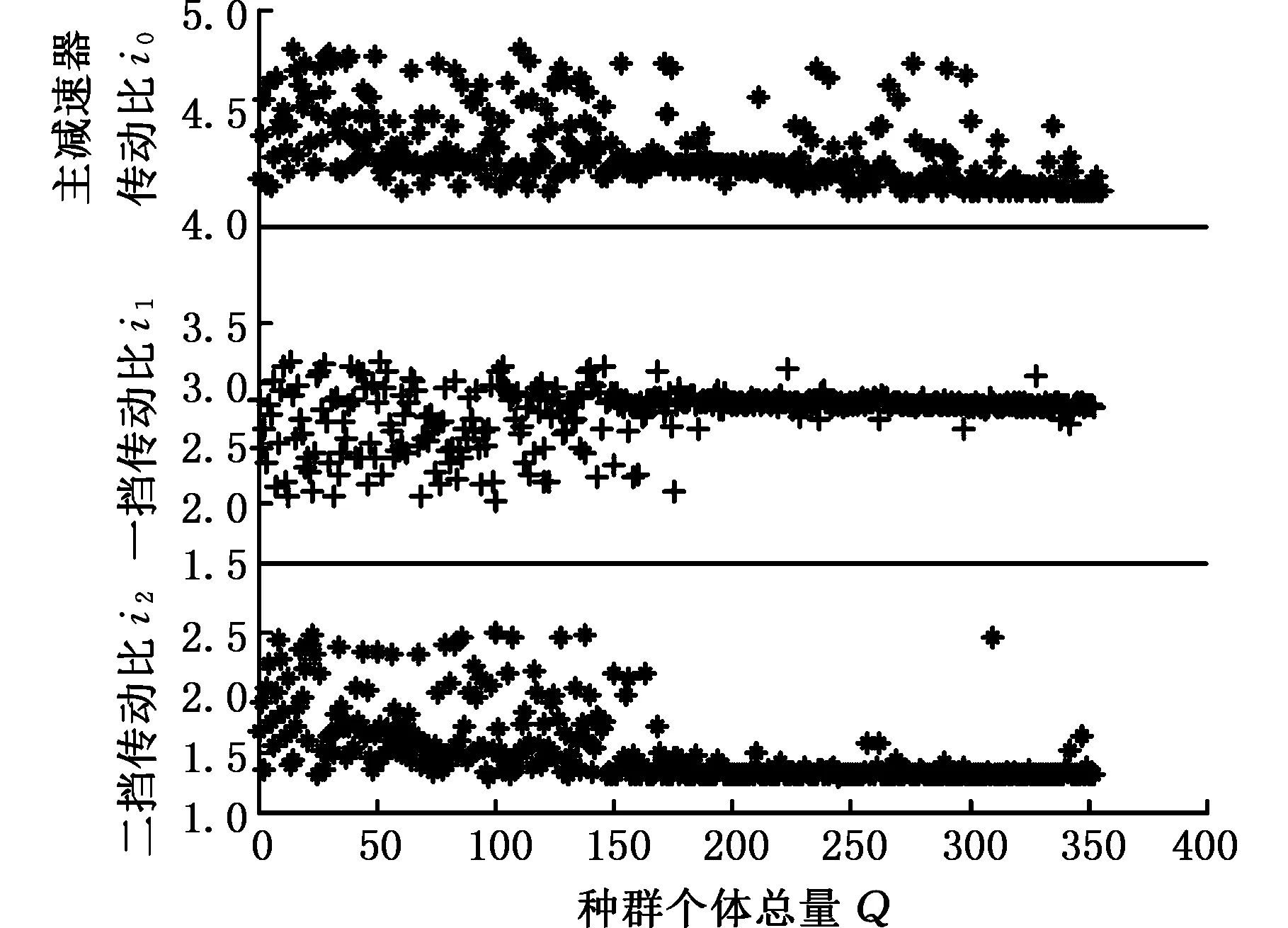
圖8 傳動(dòng)比優(yōu)化進(jìn)程Fig.8 The optimization process of transmission ratio
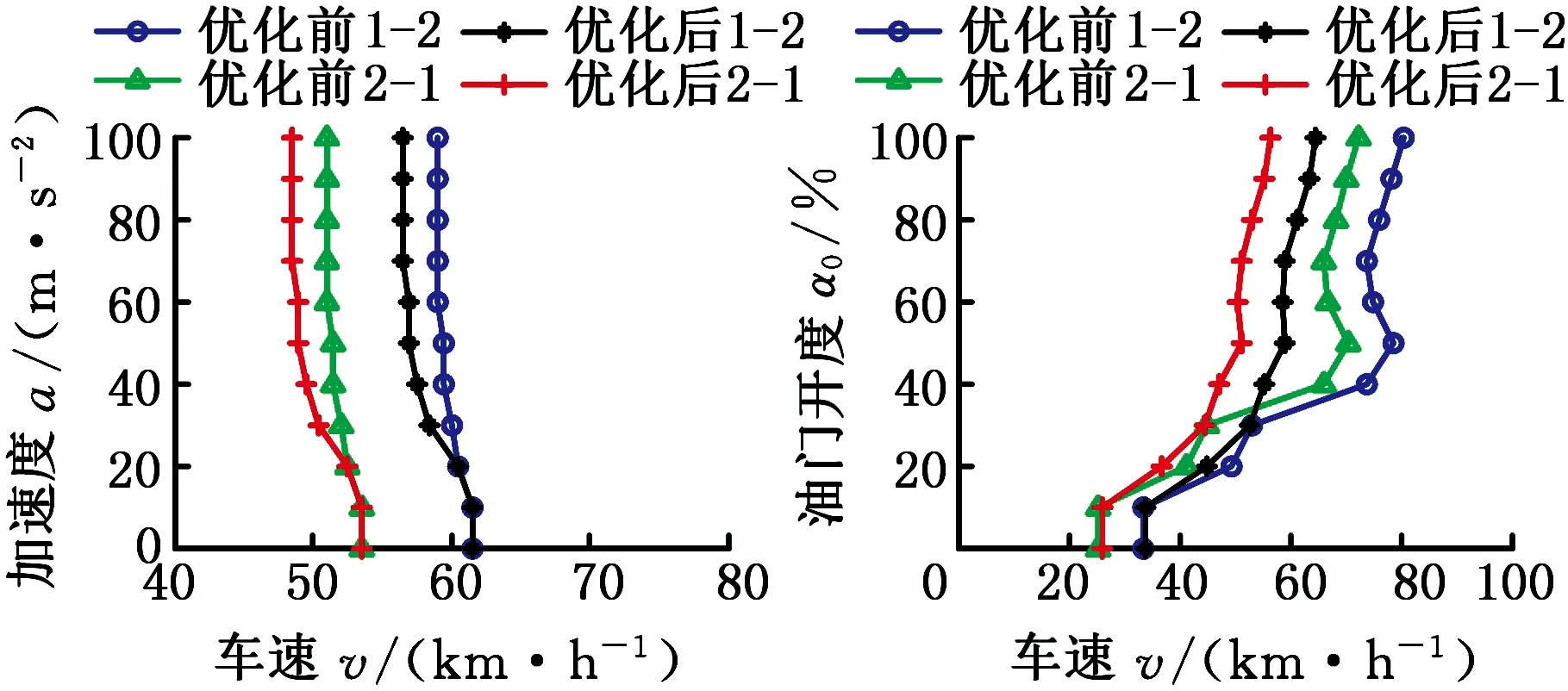
(a)動(dòng)力性換擋規(guī)律 (b)經(jīng)濟(jì)性換擋規(guī)律圖9 換擋規(guī)律曲線Fig.9 The curve of shift schedule
在整個(gè)優(yōu)化過(guò)程中,齒輪速比不斷變化,最終均穩(wěn)定在某固定值附近,圖8為一擋傳動(dòng)比、二擋傳動(dòng)比和主減速比優(yōu)化進(jìn)程圖。
2.4 優(yōu)化結(jié)果對(duì)比
圖9所示為優(yōu)化前后整車動(dòng)力性和經(jīng)濟(jì)性換擋規(guī)律曲線,圖10所示為仿真工況及優(yōu)化前后整車行駛擋位。優(yōu)化后整車動(dòng)力性和經(jīng)濟(jì)性均有提升,動(dòng)力性換擋點(diǎn)向低速區(qū)移動(dòng),經(jīng)濟(jì)性點(diǎn)向電機(jī)高效區(qū)偏移。圖11所示為優(yōu)化前后單個(gè)NEDC工況下電機(jī)工作點(diǎn)和電池耗電量,圖12所示為優(yōu)化前后單個(gè)HWFET工況下電機(jī)工作點(diǎn)和電池耗電量。優(yōu)化后NEDC工況電機(jī)工作區(qū)間向大轉(zhuǎn)矩高效區(qū)伸展,HWFET工況電機(jī)工作區(qū)間集中向額定轉(zhuǎn)速高效區(qū)靠攏。
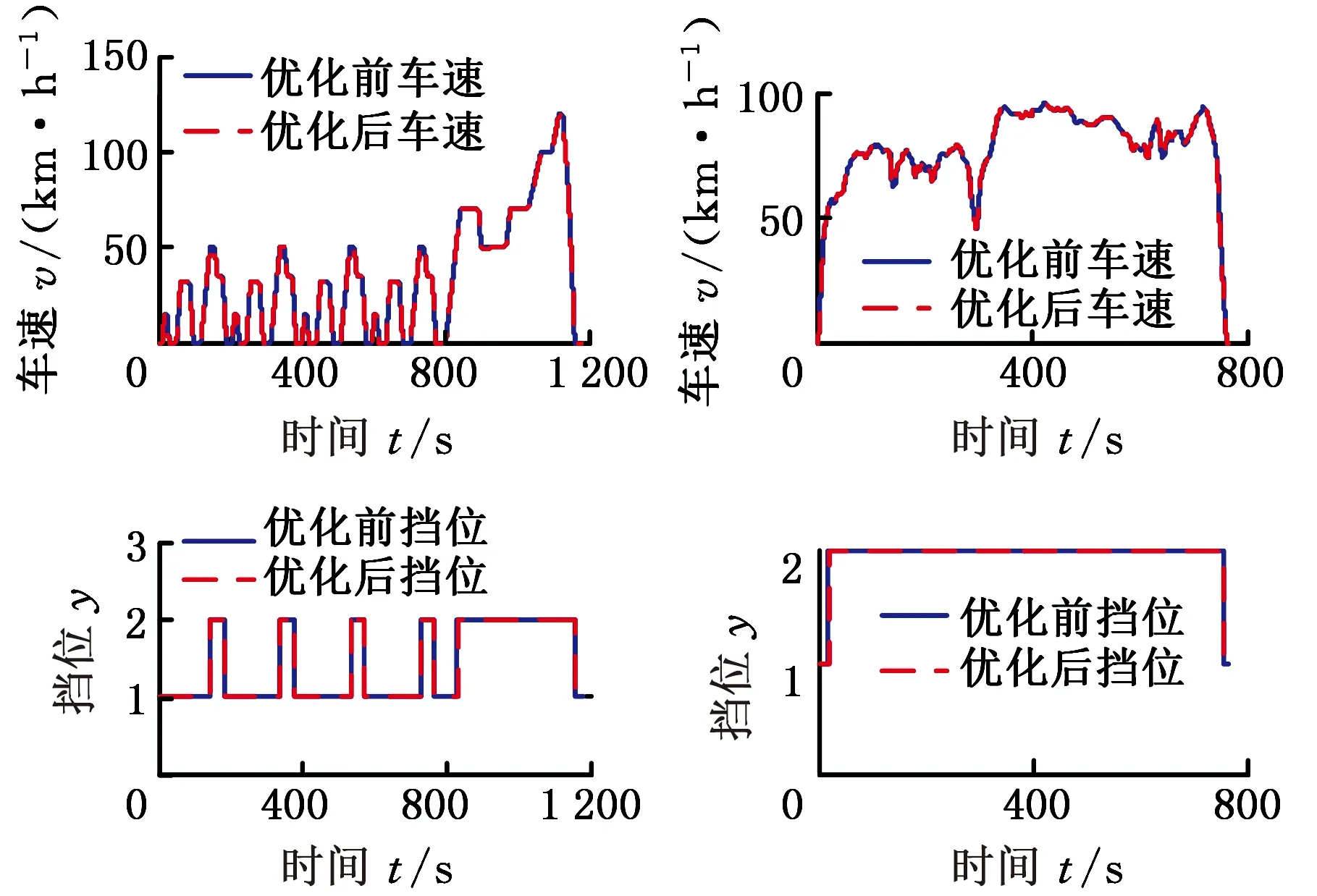
(a)NEDC工況(b)HWFET工況圖10 仿真工況和擋位Fig.10 Simulation conditions and gear
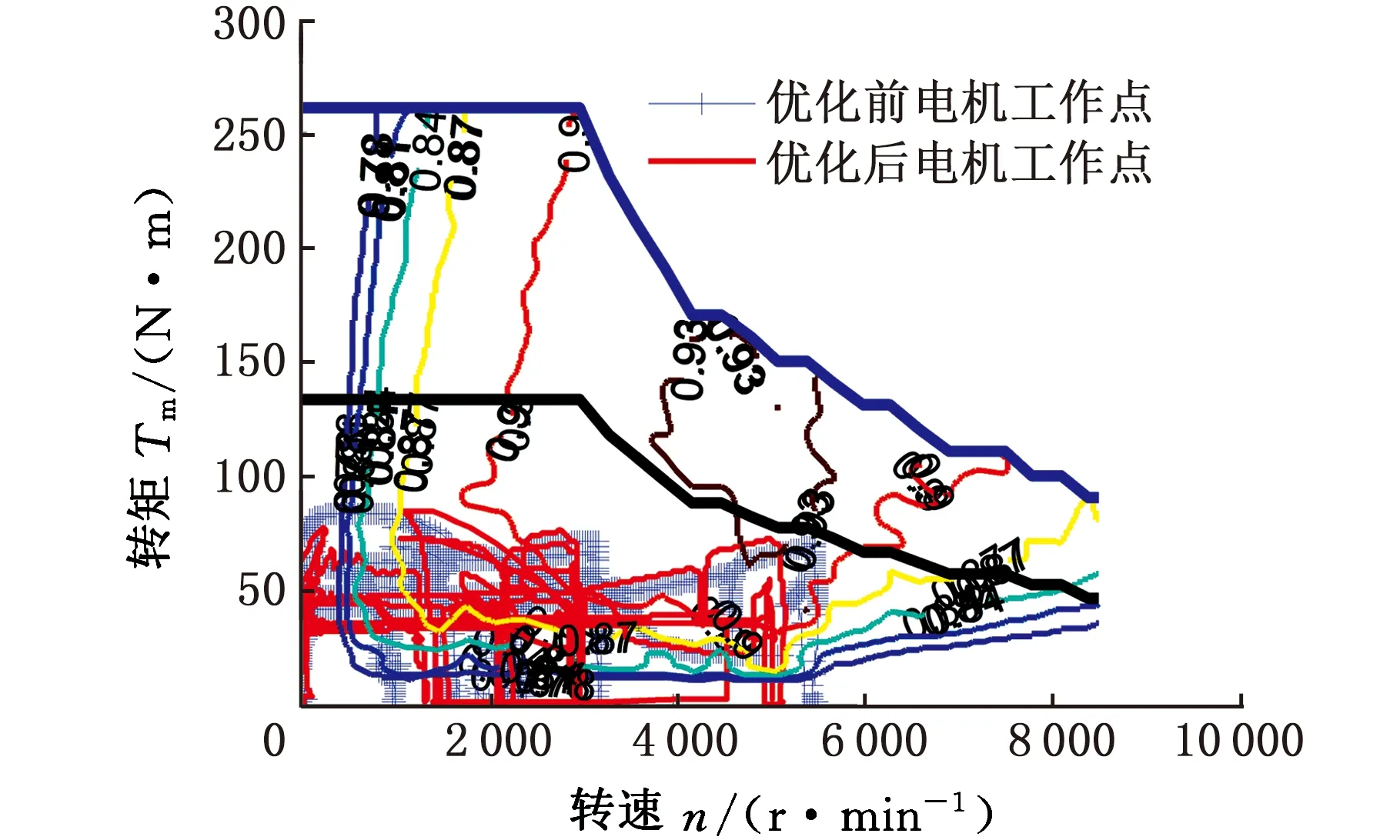
(a)工作點(diǎn)
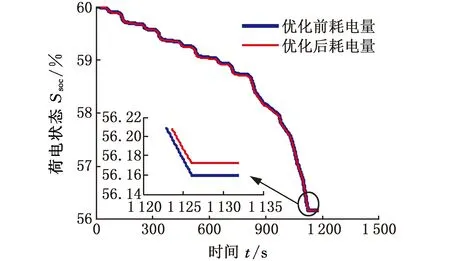
(b)電池耗電量圖11 NEDC工況電機(jī)工作點(diǎn)和電池耗電量Fig.11 The motor operating point and the battery power consumption in NEDC
表11為優(yōu)化前后整車性能指標(biāo)。相較于優(yōu)化前,整車動(dòng)力性和經(jīng)濟(jì)性均有明顯的提升,0~100 km/h加速時(shí)間縮短了5.79%,NEDC工況續(xù)駛里程增加了0.31%,HWFET工況續(xù)駛里程增加了1.44%。
3 試驗(yàn)車型對(duì)比
為證明傳動(dòng)系統(tǒng)仿真模型的正確性和匹配結(jié)果的優(yōu)越性,將優(yōu)化后的整車性能與兩擋DCT試驗(yàn)結(jié)果和兩擋DCT仿真結(jié)果對(duì)比驗(yàn)證,試驗(yàn)車型見圖13。
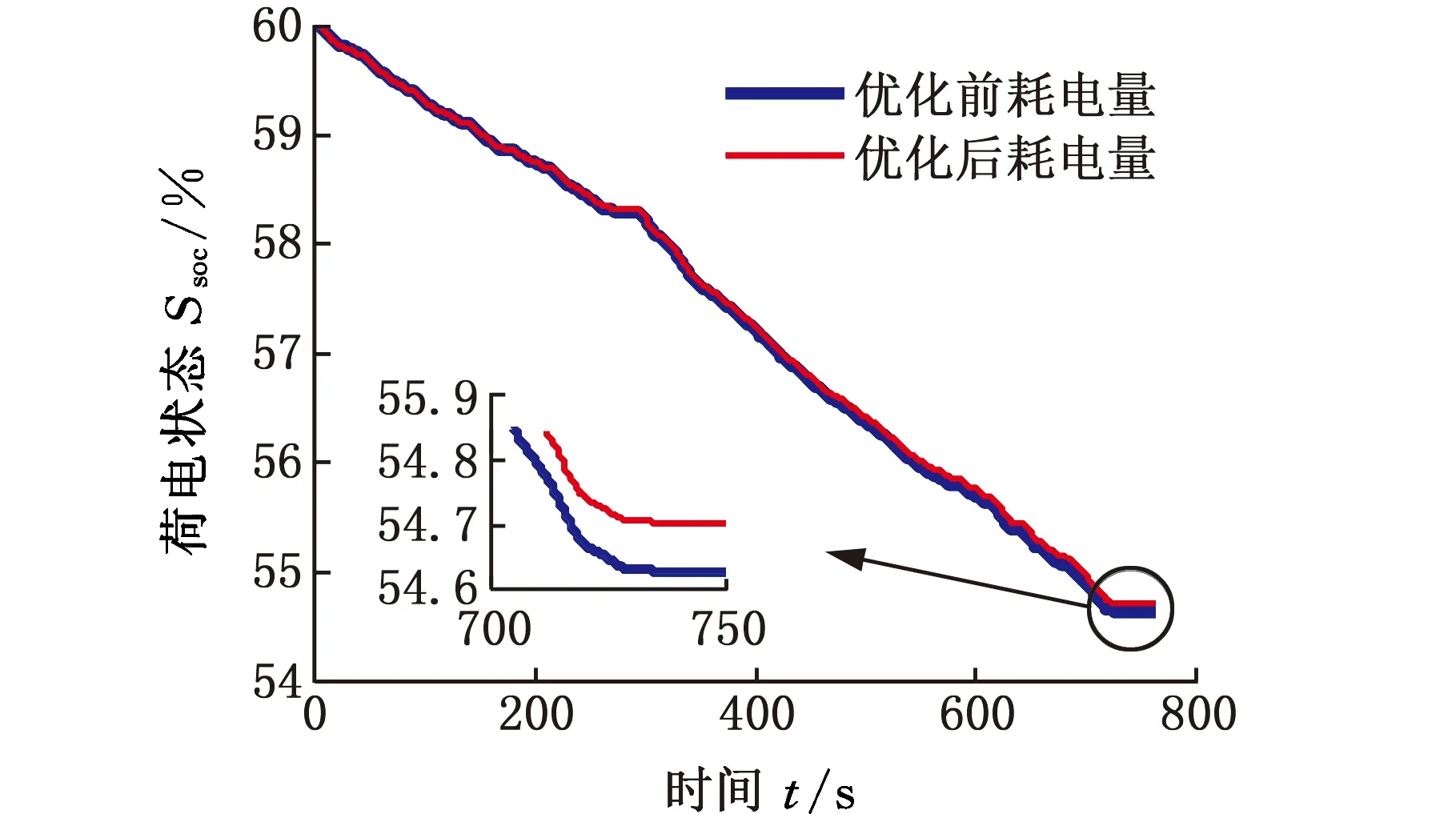
圖14所示為整車行駛工況目標(biāo)曲線和試驗(yàn)測(cè)試曲線,實(shí)車測(cè)試結(jié)果很夠跟隨目標(biāo)車速。圖15為NEDC工況主減速器實(shí)車測(cè)試結(jié)果與仿真結(jié)果對(duì)比,圖16為NEDC工況實(shí)車SOC測(cè)試結(jié)果與仿真結(jié)果對(duì)比。如表12所示,相較于純電動(dòng)兩擋DCT試驗(yàn)車型,兩擋DCT仿真結(jié)果0~100 km/h加速時(shí)間和NEDC續(xù)駛里程誤差均在2%以內(nèi);相較于純電動(dòng)兩擋DCT試驗(yàn)車型,采用匹配的兩擋AMT純電動(dòng)汽車整車動(dòng)力性和經(jīng)濟(jì)性均有明顯的提升,0~50 km/h和0~100 km/h加速時(shí)間分別縮短了28.37%和10.31%。50~80 km/h加速時(shí)間略有縮短,這是因?yàn)榇塑囁賲^(qū)間存在換擋過(guò)程,換擋時(shí)間在這個(gè)區(qū)段被充分考慮,最大爬坡度增加了30.97%,最高車速增加了0.16%,NEDC工況續(xù)駛里程增加了5.85%;相較于兩擋DCT仿真結(jié)果,0~100 km/h加速時(shí)間縮短了8.9%,NEDC工況續(xù)駛里程增加了3.68%。
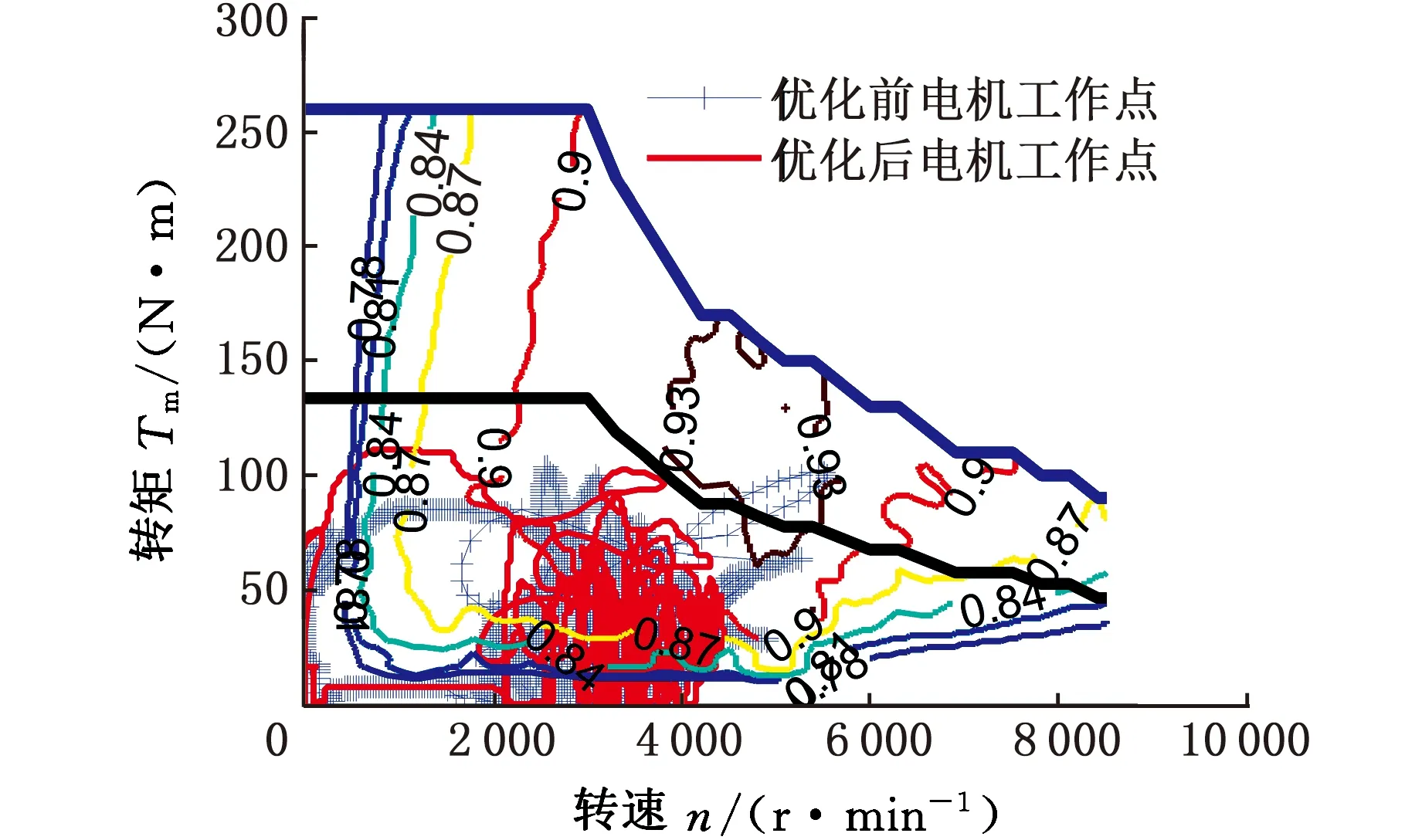
(a)工作點(diǎn)
(b)電池耗電量圖12 HWFET工況電機(jī)工作點(diǎn)和電池耗電量Fig.12 The motor operating point and battery power consumption in HWFET
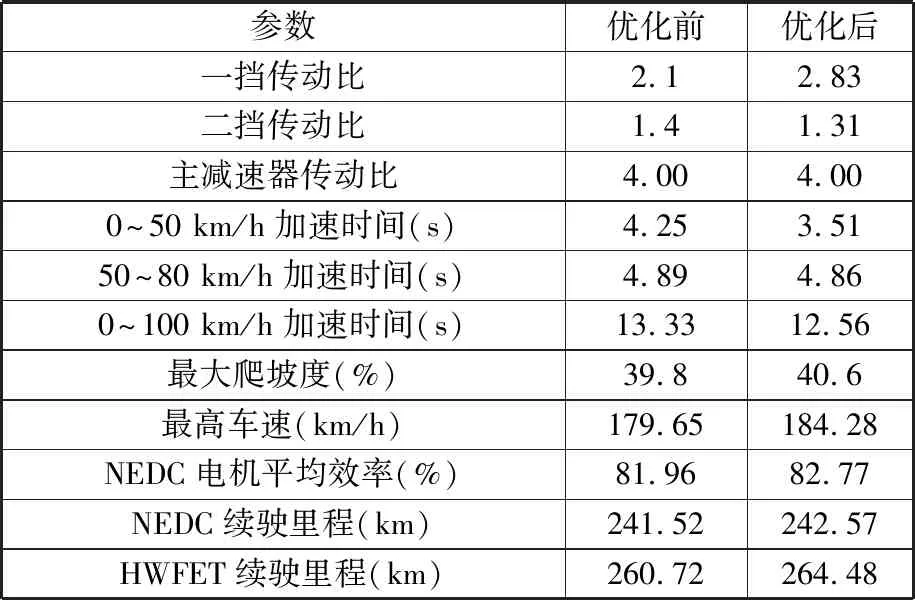
參數(shù)優(yōu)化前優(yōu)化后一擋傳動(dòng)比2.12.83二擋傳動(dòng)比1.41.31主減速器傳動(dòng)比4.004.000~50 km/h加速時(shí)間(s)4.253.5150~80 km/h加速時(shí)間(s)4.894.860~100 km/h加速時(shí)間(s)13.3312.56最大爬坡度(%)39.840.6最高車速(km/h)179.65184.28NEDC電機(jī)平均效率(%)81.9682.77NEDC續(xù)駛里程(km)241.52242.57HWFET續(xù)駛里程(km)260.72264.48

圖13 試驗(yàn)車型Fig.13 The picture of the test vehicle
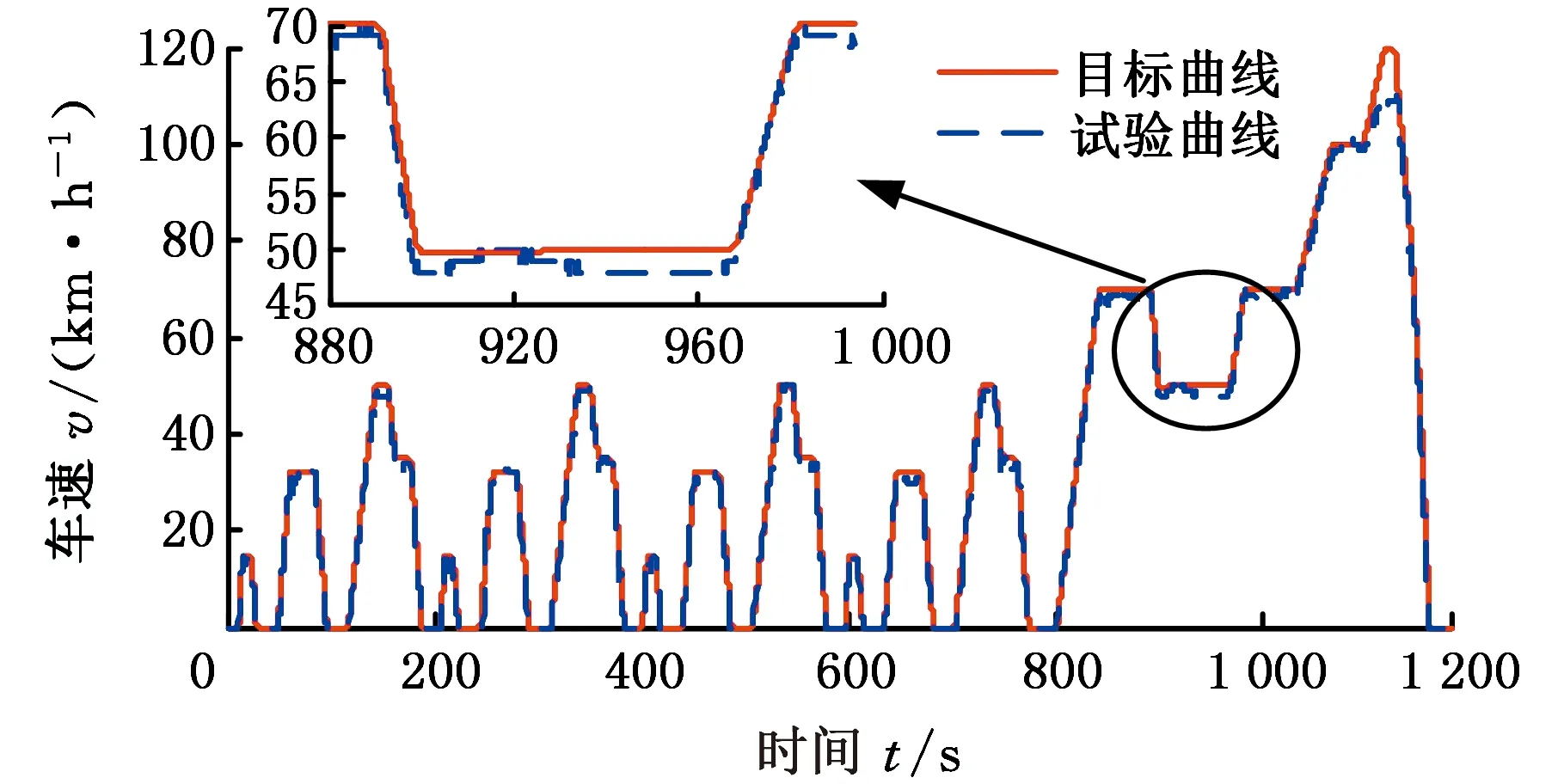
圖14 NEDC工況曲線Fig.14 The NEDC operating conditions curve
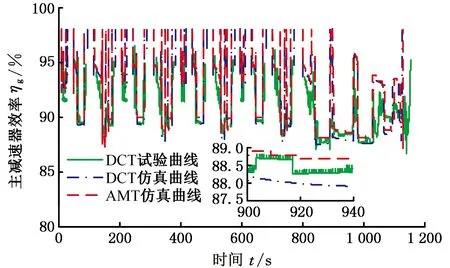
圖15 NEDC工況主減速器效率對(duì)比Fig.15 The main reducer efficiency comparison in NEDC

表12 整車性能對(duì)比
4 結(jié)論
(1)以電機(jī)峰值功率和峰值轉(zhuǎn)矩為綜合設(shè)計(jì)目標(biāo),以整車動(dòng)力性指標(biāo)為限制條件,運(yùn)用多目標(biāo)遺傳算法匹配優(yōu)化電機(jī)參數(shù),確定傳動(dòng)系統(tǒng)參數(shù),包括電池容量、電機(jī)峰值功率和峰值扭矩等。
(2)為提高純電動(dòng)汽車傳動(dòng)系統(tǒng)工作效率,以整車綜合工況電池耗電量為優(yōu)化目標(biāo),以整車動(dòng)力性指標(biāo)為約束條件,采用全局優(yōu)化遺傳算法對(duì)純電動(dòng)車兩擋AMT齒速比進(jìn)行優(yōu)化設(shè)計(jì),最終確定變速器傳動(dòng)比。與優(yōu)化前的匹配結(jié)果相比,整車動(dòng)力性和經(jīng)濟(jì)性均有較大提升,0~100 km/h加速時(shí)間縮短了5.79%,最高車速提高了2.58%,NEDC工況續(xù)駛里程增加了0.31%,HWFET工況續(xù)駛里程增加了1.44%。
(3)采用兩擋AMT電動(dòng)汽車,相較于兩擋DCT試驗(yàn)車型,整車性能有明顯提升,0~100 km/h加速時(shí)間縮短了10.31%,最高車速提升了0.16%,電動(dòng)車傳動(dòng)系統(tǒng)高效區(qū)間得到高效利用,電動(dòng)車NEDC續(xù)駛里程增加了5.85%。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
能源工程(2022年1期)2022-03-29 01:06:28
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
今日農(nóng)業(yè)(2020年16期)2020-12-14 15:04:59
消費(fèi)導(dǎo)刊(2018年8期)2018-05-25 13:20:08
家庭影院技術(shù)(2018年4期)2018-05-09 07:07:41
電子制作(2017年20期)2017-04-26 06:57:45
