基于最小理論支撐體積的模型三維打印的打印方向分析
2019-04-23 07:14:38姜曉通郭保蘇彭慶金劉德利
中國機(jī)械工程 2019年7期
姜曉通 郭保蘇 彭慶金 劉德利
1.常熟理工學(xué)院機(jī)械工程學(xué)院,常熟,2155002.燕山大學(xué)機(jī)械工程學(xué)院,秦皇島,066044 3.加拿大曼尼托巴大學(xué)機(jī)械工程學(xué)院,加拿大曼尼托巴,R3T 5V6
0 引言
在大部分三維打印中,模型的外部支撐結(jié)構(gòu)是不可避免的,是三維打印建模的重要研究內(nèi)容[1]。外部支撐結(jié)構(gòu)在打印過程中起到支撐模型懸空部分的作用,完成打印后需去除。外部支撐結(jié)構(gòu)的增加會(huì)增加打印模型的成本及時(shí)間,同時(shí)在去除支撐時(shí),會(huì)影響支撐部分模型表面的質(zhì)量,有時(shí)甚至?xí)茐哪P捅砻妫虼巳绾卧诖蛴∵^程中減小支撐結(jié)構(gòu)的體積是三維打印建模的重要研究內(nèi)容之一。通常情況下,模型的支撐結(jié)構(gòu)體積與支撐本身的結(jié)構(gòu)和模型的打印方向兩個(gè)因素直接相關(guān),因此,在支撐結(jié)構(gòu)相同的情況下,支撐的使用量主要取決于模型的打印方向。打印方向會(huì)在許多方面影響打印模型的質(zhì)量,如模型表面光滑度、支撐結(jié)構(gòu)材料的體積、模型強(qiáng)度及模型打印時(shí)間等。根據(jù)考慮影響打印模型質(zhì)量的因素?cái)?shù)量,打印方向優(yōu)化可以分為單一目標(biāo)屬性優(yōu)化和多目標(biāo)屬性優(yōu)化。
單一目標(biāo)屬性優(yōu)化是在確定模型的打印方向時(shí)只考慮影響模型打印質(zhì)量的單一屬性。KATTETHOTA等[2]在確定打印方向時(shí)考慮了模型表面的光滑度。GUPTA等[3]優(yōu)化了模型的打印時(shí)間,將單位球面分解為多個(gè)曲面多邊形,在每個(gè)曲面多邊形所定義的區(qū)間內(nèi)對(duì)打印時(shí)間進(jìn)行優(yōu)化,計(jì)算最短打印時(shí)間對(duì)應(yīng)的打印方向。大多數(shù)文獻(xiàn)計(jì)算支撐體積這一單一目標(biāo)屬性來計(jì)算最優(yōu)方向。KHARDEKAR等[4]在計(jì)算最優(yōu)方向時(shí)采用GPU進(jìn)行加速來提高算法的效率,相比CPU下的速度提高90%,且具有較好的精度。EZAIR等[5]采用與文獻(xiàn)[3]類似的方法,在GPU下求解最小打印體積所對(duì)應(yīng)的方向。HU等[6]將模型分解為多個(gè)小的組件,計(jì)算每個(gè)組件不需要或只需要少量支撐的打印方向并分別進(jìn)行打印,最后將小組件組裝成完整的模型。
多目標(biāo)屬性優(yōu)化則是在確定打印方向時(shí),同時(shí)考慮多個(gè)目標(biāo)屬性。SANATI等[7]在確定最優(yōu)打印方向時(shí),采用多目標(biāo)遺傳算法來評(píng)估模型表面粗糙度、支撐體積及打印時(shí)間等屬性。BYUN等[8]同樣采用遺傳算法進(jìn)行最優(yōu)打印方向的求解,在計(jì)算最優(yōu)打印方向時(shí)考慮打印時(shí)間及模型質(zhì)量兩個(gè)屬性。與單一目標(biāo)屬性優(yōu)化相比,多目標(biāo)屬性優(yōu)化更加耗時(shí)[9]。
現(xiàn)有的打印方向計(jì)算方法并沒有從理論上闡述最小支撐體積所對(duì)應(yīng)方向的計(jì)算。本文將支撐體積目標(biāo)屬性作為優(yōu)化對(duì)象,計(jì)算三維模型最小理論支撐體積所對(duì)應(yīng)的打印方向。首先闡述了模型理論支撐體積的理論背景,針對(duì)離散網(wǎng)格模型的特點(diǎn),提出了其理論支撐體積的計(jì)算方法,在計(jì)算過程中,利用光線追蹤算法處理凹模型。針對(duì)理論支撐體積函數(shù)的不可導(dǎo)性,提出了一種基于球面坐標(biāo)采樣、無導(dǎo)數(shù)優(yōu)化算法進(jìn)行最優(yōu)方向的計(jì)算方法。最后針對(duì)本文算法結(jié)果,從計(jì)算精度、時(shí)間及步長對(duì)結(jié)果的影響等方面對(duì)算法進(jìn)行驗(yàn)證分析。
1 理論支撐體積計(jì)算
設(shè)三維空間中的二維流形三角網(wǎng)格模型M=(C,E,V)∈R3,其中,C代表網(wǎng)格模型中點(diǎn)的拓?fù)潢P(guān)系,E代表網(wǎng)格模型中所有邊的集合,V={v0,v1,…,vn-1}(vi∈R3,i=0,1,…,n-1)是網(wǎng)格模型點(diǎn)的集合。定義S為模型的支撐結(jié)構(gòu),V(S)為支撐結(jié)構(gòu)的體積。設(shè)+z為模型的打印方向,z方向上模型最低點(diǎn)的值為Zmin,即打印模型時(shí)的初始水平高度(打印平臺(tái)在z方向上的最小值)。在三維打印過程中,模型是“自上而下”逐層成形的過程,理論上模型懸空部分的所有網(wǎng)格面都需要添加支撐,該支撐為網(wǎng)格面到打印平臺(tái)的空間。然而,由于打印材料在成形過程中具有一定的延展性,模型的部分懸空網(wǎng)格面并不需要支撐,因此在實(shí)際打印過程中,支撐體積小于理論值。在計(jì)算模型最小支撐體積對(duì)應(yīng)的打印方向時(shí),在不確定支撐結(jié)構(gòu)的情況下不能以實(shí)際支撐體積作為計(jì)算依據(jù)。由此,在實(shí)際計(jì)算過程中,通常以理論支撐體積作為計(jì)算依據(jù)來計(jì)算實(shí)際支撐體積最小時(shí)對(duì)應(yīng)的打印方向。基于此,本文在確定最小支撐體積對(duì)應(yīng)的打印方向時(shí)同樣采用理論最小支撐體積。對(duì)于模型支撐S,其定義為
S:={(x,y,z)|z≥Zmin,?z′>z,
(x,y,z′)∈M且(x,y,z)?M}
(1)
式中,z′為投影點(diǎn)的z向值。
由式(1)可得,支撐S與模型M彼此互斥,即任何屬于模型M的部分都不屬于支撐S。
在計(jì)算模型給定方向的理論支撐體積時(shí),由于網(wǎng)格模型并不是連續(xù)的曲面模型,其網(wǎng)格表面由許多離散的三角面片組成,故其求解并不是一個(gè)連續(xù)積分問題,而是一個(gè)離散積分問題。該離散積分問題求解的實(shí)質(zhì)是求和所有“懸空”三角面片對(duì)應(yīng)的棱柱體的體積。根據(jù)凹凸性不通,模型可分為凹面模型和凸面模型,如圖1所示。在計(jì)算理論支撐體積時(shí),它們的計(jì)算過程也不相同。圖1a為凸面模型的理論支撐體積,其值為所有“懸空”三角面片對(duì)應(yīng)的三棱柱體積之和。圖1b為凹面模型的理論支撐體積,由于部分“懸空”三角面片對(duì)應(yīng)的三棱柱并不在打印平臺(tái)上,而是位于模型上,因此在計(jì)算時(shí)需要計(jì)算三棱柱與模型交點(diǎn)的位置。

(a)凸面模型 (b)凹面模型圖1 模型理論支撐體積Fig.1 Theory support volume of models

(2)
若i=k-1,則i+1=0
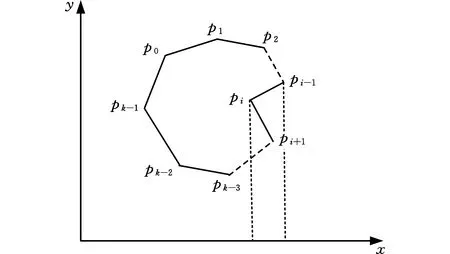
圖2 多邊形面積計(jì)算Fig.2 Area calculation of polygon
與多邊形面積的求解相似,在計(jì)算模型的理論支撐體積時(shí)同樣采用離散積分的方法。假設(shè)T為模型的一個(gè)三角面片,3個(gè)頂點(diǎn)分別為vi=(xi,yi,zi),i=0,1,2。三角面片T與打印平臺(tái)(打印平臺(tái)的z方向左邊為0)所組成三棱柱的體積計(jì)算公式為
V(T)=nz(z0+z1+z2)/6
(3)
n(T)=(nx,ny,nz),為三角面片T的非單位法矢,計(jì)算公式為n(T)=(v1-v0)×(v2-v0)。
對(duì)于凸面模型,其所有“懸空”三角面片對(duì)應(yīng)的三棱柱的體積之和即為該模型的理論支撐體積,即
(4)
式中,n為模型中三角面片的個(gè)數(shù)。
對(duì)于凹面模型,在給定的打印方向,部分“懸空”三角面片對(duì)應(yīng)的三棱柱的底部是落在網(wǎng)格模型上,而不是打印平臺(tái),因此在計(jì)算凹面模型的理論支撐體積時(shí),式(3)并不完全適用。此時(shí)需要計(jì)算哪些三角面片對(duì)應(yīng)的三棱柱的底部落在打印平臺(tái)上,哪些不落在平臺(tái)上。本文利用光線追蹤算法判斷“懸空”三角面片這一屬性。
在計(jì)算機(jī)圖形學(xué)中,光線追蹤算法是被用來生成逼真三維場(chǎng)景的主要算法之一。近年來,隨著可視化、虛擬現(xiàn)實(shí)的發(fā)展,該算法得到了越來越廣泛的應(yīng)用。在計(jì)算幾何中,光線追蹤算法被廣泛應(yīng)用于幾何求交,但該算法在求交過程中需要較大的運(yùn)算開銷,運(yùn)行效率較低。為了提高運(yùn)算效率,在進(jìn)行求交運(yùn)算前,一般需要對(duì)模型進(jìn)行空間劃分,構(gòu)建一定的空間層次結(jié)構(gòu),如均勻網(wǎng)格劃分[10]、八叉樹[11]及KD-Tree[12](一種特殊的二叉空間分割等空間劃分方法)。這些空間層次結(jié)構(gòu)都能夠加快光線追蹤的速度,本文采用最常用的KD-tree來提高光線追蹤的求交速度。根據(jù)生成支撐求交的特殊性,在求交過程中只計(jì)算“懸空”三角面片在光線方向上距離模型最近的交點(diǎn)。設(shè)算法1為基于KD-Tree的光線追蹤求交算法(圖3)。根據(jù)算法1,當(dāng)“懸空”三角面片對(duì)應(yīng)的三棱柱的底面落在模型上時(shí),式(3)變?yōu)?/p>
(5)

2 最小理論支撐體積所對(duì)應(yīng)的打印方向計(jì)算
由于理論支撐體積函數(shù)并不光滑,故在求解最小理論支撐體積對(duì)應(yīng)的方向時(shí),并不能利用函數(shù)求導(dǎo)數(shù)的方法進(jìn)行求解,通常需要利用無導(dǎo)數(shù)優(yōu)化算法[13-15]來求解最優(yōu)方向。此時(shí),對(duì)于多極值函數(shù),任意給定一個(gè)初值進(jìn)行最優(yōu)值求解時(shí),其求解結(jié)果往往只是一個(gè)局部最優(yōu)解,并不是全局最優(yōu)解。為得到函數(shù)的全局最優(yōu)解,在利用無導(dǎo)數(shù)優(yōu)化算法進(jìn)行求解前,需要確定部分可信賴區(qū)間,然后計(jì)算各個(gè)可信賴區(qū)間的局部最優(yōu)值,進(jìn)而得到全局最優(yōu)解。
本文利用球面坐標(biāo)對(duì)打印方向進(jìn)行采樣,以計(jì)算得到的理論支撐體積最小的前n個(gè)采樣方向所在的區(qū)間作為可信賴區(qū)間,在可信賴區(qū)間內(nèi)求得局部極值,再通過比較得到全局最優(yōu)解。在計(jì)算最小理論支撐體積對(duì)應(yīng)的打印方向前,首先討論模型理論支撐體積函數(shù)V(S)的可導(dǎo)性。
2.1 理論支撐體積函數(shù)的可導(dǎo)性
為了簡化計(jì)算,本文以凸面模型為例討論其理論支撐體積函數(shù)的可導(dǎo)性。由于網(wǎng)格模型的理論支撐體積為模型“懸空”三角面片對(duì)應(yīng)的棱柱體體積之和,因此這里只討論其中一個(gè)“懸空”三角面片T對(duì)應(yīng)的三棱柱體積函數(shù)V(T)的可導(dǎo)性。當(dāng)T繞著x軸旋轉(zhuǎn)角度θ時(shí),式(3)中的zi變?yōu)閦icosθ+yisinθ(i=0,1,2),nz變?yōu)閚zcosθ+nysinθ,則式(3)變?yōu)轶w積關(guān)于轉(zhuǎn)角θ的函數(shù):
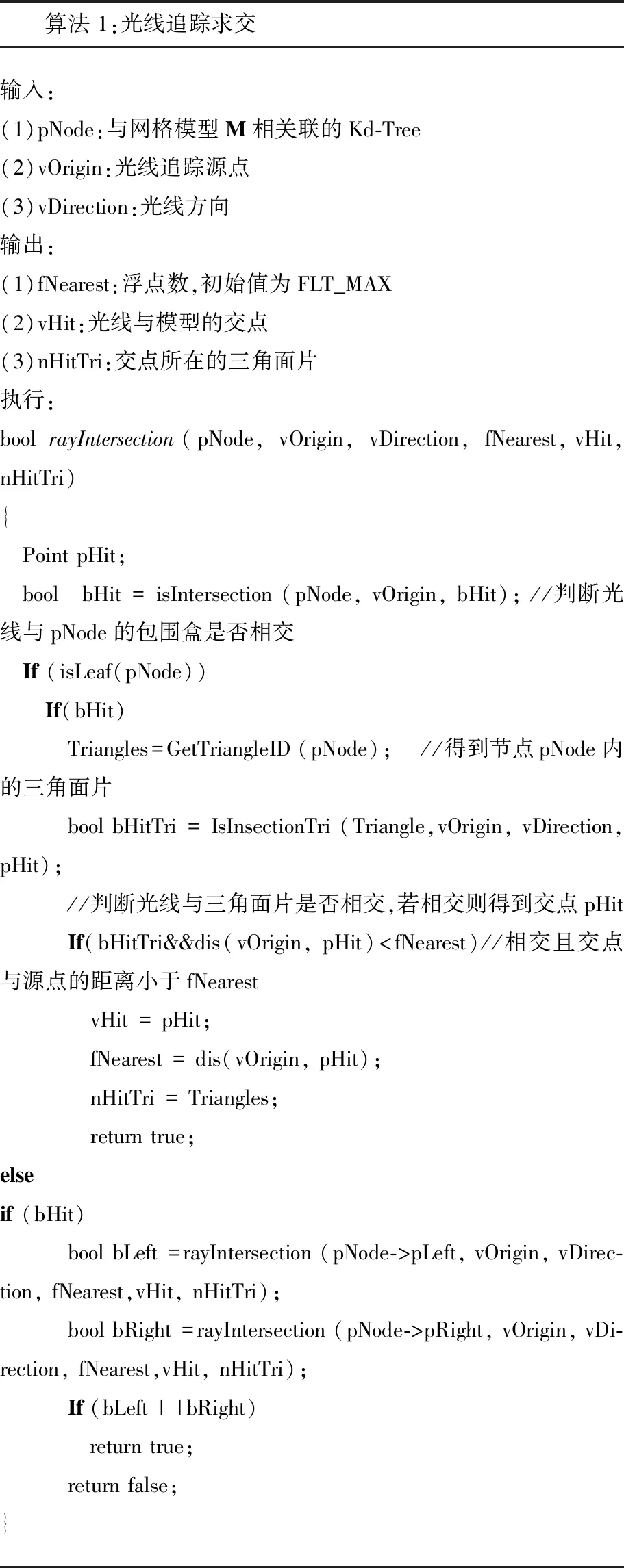
算法 1:光線追蹤求交輸入: (1)pNode:與網(wǎng)格模型M相關(guān)聯(lián)的Kd-Tree(2)vOrigin:光線追蹤源點(diǎn)(3)vDirection:光線方向輸出:(1)fNearest:浮點(diǎn)數(shù),初始值為FLT_MAX(2)vHit:光線與模型的交點(diǎn)(3)nHitTri:交點(diǎn)所在的三角面片 執(zhí)行:bool rayIntersection(pNode, vOrigin, vDirection, fNearest,vHit, nHitTri){ Point pHit; bool bHit = isIntersection (pNode, vOrigin, bHit); //判斷光線與pNode的包圍盒是否相交 If (isLeaf(pNode))If(bHit) Triangles=GetTriangleID (pNode); //得到節(jié)點(diǎn)pNode內(nèi)的三角面片 bool bHitTri = IsInsectionTri (Triangle,vOrigin, vDirection, pHit); //判斷光線與三角面片是否相交,若相交則得到交點(diǎn)pHit If(bHitTri&&dis(vOrigin, pHit)
圖3光線追蹤求交算法
Fig.3Raytracingintersectionalgorithm

(6)
式(6)變形后為

(7)
為了進(jìn)一步簡化計(jì)算,這里假設(shè)T的初始位置與水平面平行,則式(7)可以簡化為
(8)

(a)立方體模型 (b)RockArm模型圖4 測(cè)試模型Fig.4 Test models
2.2 基于無導(dǎo)數(shù)優(yōu)化算法的最優(yōu)方向計(jì)算
2.2.1球面坐標(biāo)采樣
在利用無導(dǎo)數(shù)優(yōu)化算法求解最優(yōu)打印方向前,首先需要確定求解的部分可信賴區(qū)間。由于本文算法的求解目標(biāo)為打印方向,因此采用球面坐標(biāo)的方法對(duì)空間方向進(jìn)行采樣,計(jì)算每個(gè)采樣點(diǎn)對(duì)應(yīng)打印方向的理論支撐體積,選擇體積最小的前n個(gè)方向?qū)?yīng)的區(qū)間作為無導(dǎo)數(shù)優(yōu)化算法求解的可信賴區(qū)間。

(a)立方體模型
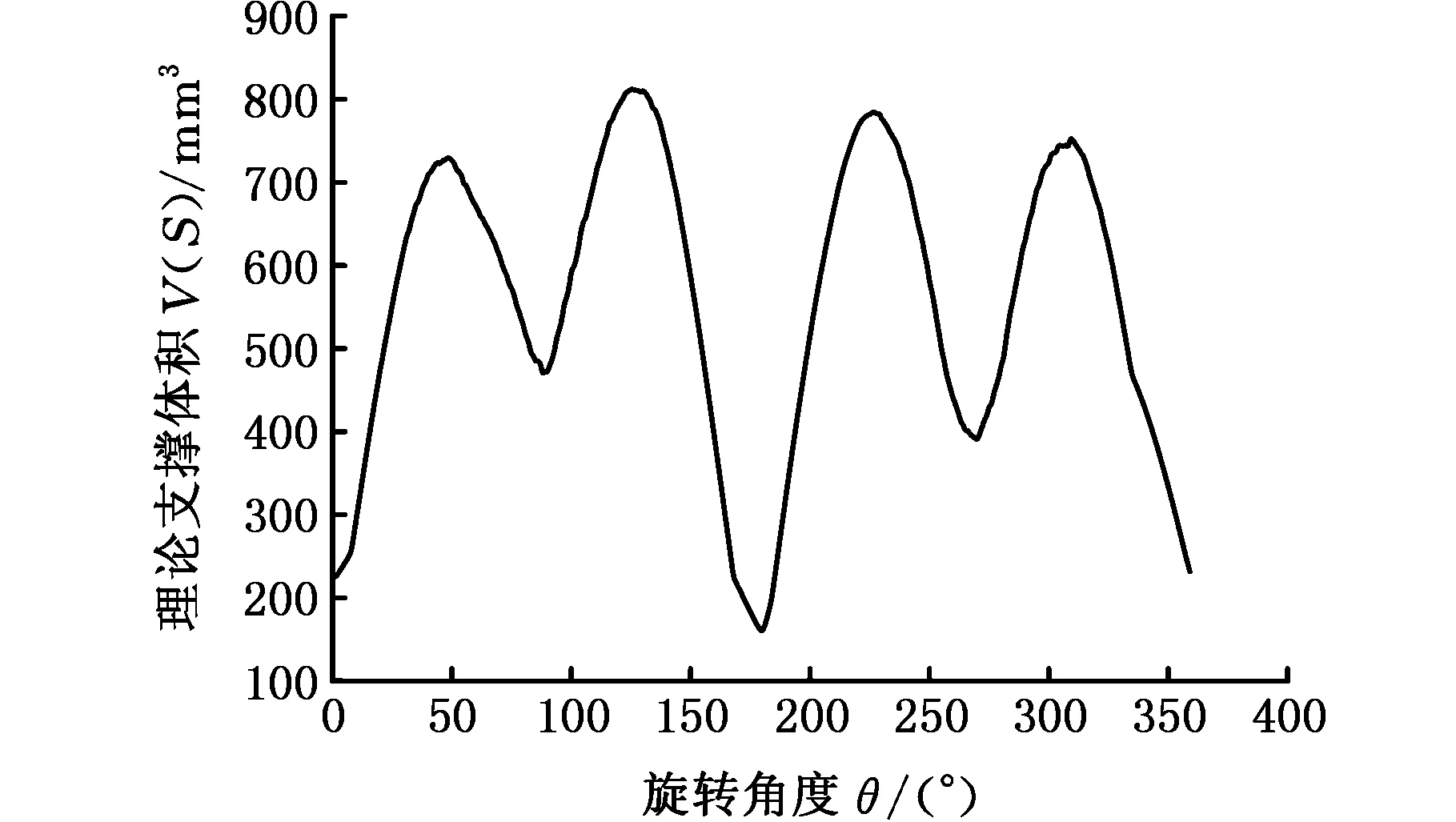
(b)RockArm模型圖5 模型理論支撐體積曲線圖Fig.5 Curve graph of models’ theory support volume

圖6 球面坐標(biāo)示意圖Fig.6 Schematic diagram of spheroidal coordinates
圖7 球面坐標(biāo)采樣結(jié)果Fig.7 Results of spheroidal coordinate sampling
球面坐標(biāo)以坐標(biāo)原點(diǎn)為參考點(diǎn),由方位角、仰角及距離構(gòu)成。如圖6所示,假設(shè)p(x,y,z)為三維空間內(nèi)一點(diǎn),則點(diǎn)p的空間位置可用3個(gè)有次序的數(shù)(r,θ,φ)來確定,其中,r為原點(diǎn)o與點(diǎn)p間的距離,θ為從正z軸來看自x軸按逆時(shí)針方向轉(zhuǎn)到op′所轉(zhuǎn)過的角,φ為有向線段op與z軸正向的夾角,這里p′為點(diǎn)p在xoy面上的投影。r、θ、φ的取值范圍分別為:r∈[0,+∞),φ∈[0,2π],θ∈[0,2π]。球面坐標(biāo)采樣的實(shí)質(zhì)為對(duì)θ及φ方向進(jìn)行球面坐標(biāo)均勻采樣,并利用一定的轉(zhuǎn)化關(guān)系將其轉(zhuǎn)化成直角坐標(biāo)系內(nèi)的空間點(diǎn)。以圖6中的點(diǎn)p為例,該轉(zhuǎn)化關(guān)系為:xp=rsinθcosφ,yp=rsinθsinφ,zp=rcosθ。這樣,在三維空間內(nèi)生成一系列的采樣點(diǎn)pi(xi,yi,zi),則其采樣方向opi=(xi,yi,zi)。圖7為利用球面坐標(biāo)生成的采樣點(diǎn),在生成采樣點(diǎn)過程中,在θ及φ方向上進(jìn)行步長為6°的采樣,共得到1 800個(gè)采樣方向,然后計(jì)算每個(gè)采樣方向?qū)?yīng)的理論支撐體積。
2.2.2基于無導(dǎo)數(shù)優(yōu)化算法的方向優(yōu)化
在對(duì)打印方向進(jìn)行采樣并計(jì)算對(duì)應(yīng)的理論支撐體積后,將最小的幾個(gè)理論支撐體積對(duì)應(yīng)的采樣打印方向作為初始值,利用無導(dǎo)數(shù)優(yōu)化算法在選定的采樣方向?qū)?yīng)的可信賴區(qū)間內(nèi)計(jì)算局部最優(yōu)方向,則計(jì)算得到的所有局部最優(yōu)方向的最小值為全局最優(yōu)方向。在利用無導(dǎo)數(shù)優(yōu)化算法計(jì)算局部最優(yōu)解時(shí),求解的可信賴區(qū)間是保證算法能夠收斂的基礎(chǔ)。當(dāng)區(qū)間過大時(shí),區(qū)間內(nèi)部可能會(huì)有兩個(gè)甚至更多的極值,利用無導(dǎo)數(shù)優(yōu)化算法得到的局部最優(yōu)解不可信。該區(qū)間的大小取決于采樣步長,為了保證計(jì)算區(qū)間可靠,計(jì)算收斂,采樣時(shí)步長不宜過大。
無導(dǎo)數(shù)優(yōu)化算法可以分為有限差分方法[13]、基于模型的方法[14]、模式搜索方法[15]等3種方法。模式搜索方法是一種直接的局部搜索方法,在搜索過程中直接使用函數(shù)值,并不需要評(píng)估函數(shù)的導(dǎo)數(shù)。該算法的基本思想從幾何意義上來說,是尋找具有較小函數(shù)值的“山谷”,通過迭代的方法使搜索沿著“山谷”的走向來逼近極小值。該算法從給定的起始點(diǎn)開始,通過局部移動(dòng)尋找下降的方向來得到局部的最優(yōu)值,其最經(jīng)典的算法為坐標(biāo)搜索。坐標(biāo)搜索是一種無約束的優(yōu)化求解算法,求解目標(biāo)函數(shù)f(x)的最小值。在計(jì)算時(shí)首先選定一個(gè)初始值及步長,然后通過迭代的方法得到一個(gè)局部最小值。本文在計(jì)算最優(yōu)打印方向時(shí),同樣是找到最優(yōu)打印方向所對(duì)應(yīng)的球面坐標(biāo),初始化值為上面所計(jì)算的最小的幾個(gè)理論支撐體積所對(duì)應(yīng)的方向,步長閾值為1°。在每個(gè)作為初始值的方向上,利用坐標(biāo)搜索算法得到局部的最小理論支撐體積。這些局部最小理論支撐體積的最小值所對(duì)應(yīng)的打印方向即為最優(yōu)的打印方向。
3 實(shí)驗(yàn)結(jié)果分析
本文算法開發(fā)環(huán)境為VS2008,編程語言為C++,基于OpenGL圖形庫進(jìn)行模型顯示,測(cè)試用電腦的處理器為Inter Core 10 ms i5-2500,主頻為3.30GHz,內(nèi)存為4GB。本節(jié)主要從算法的精度及計(jì)算時(shí)間兩個(gè)方面來驗(yàn)證本文算法的有效性與實(shí)用性,同時(shí)分析采樣步長對(duì)計(jì)算結(jié)果的影響。在計(jì)算過程中,為了加快運(yùn)算速度,采用OpenMP技術(shù)進(jìn)行并行運(yùn)算,以提高運(yùn)算效率。
3.1 理論支撐體積的計(jì)算精度與計(jì)算時(shí)間
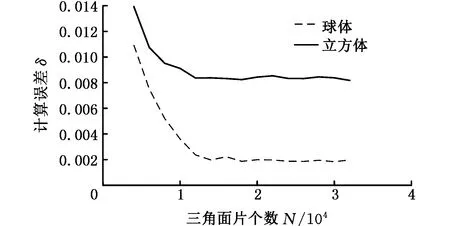
圖8 理論支撐體積的計(jì)算誤差Fig.8 Calculation error of theory support volume

圖9 理論支撐體積的計(jì)算時(shí)間Fig.9 Calculation time of theory support volume
圖9所示為理論支撐體積的計(jì)算時(shí)間與模型三角面片個(gè)數(shù)之間的關(guān)系。測(cè)試所用的模型為圖4b的RockArm模型,且在測(cè)試過程中模型的網(wǎng)格數(shù)不斷增加。對(duì)于每個(gè)測(cè)試模型,在測(cè)試過程中的采樣步長為10°,共648個(gè)采樣方向。模型在每個(gè)采樣方向上都進(jìn)行理論支撐體積的計(jì)算,然后得到單次計(jì)算的平均時(shí)間。由圖9中的曲線可得到,單次理論支撐體積的計(jì)算時(shí)間與模型三角面片個(gè)數(shù)成線性關(guān)系,隨三角面片個(gè)數(shù)的增加而增長。當(dāng)三角面片個(gè)數(shù)為70 000時(shí),計(jì)算時(shí)間為10 ms左右,完全能夠滿足時(shí)間要求。
3.2 采樣步長對(duì)計(jì)算結(jié)果的影響
在計(jì)算過程中,采樣步長會(huì)對(duì)計(jì)算時(shí)間及最終的優(yōu)化結(jié)果產(chǎn)生較大影響。這里利用不同的采樣步長來測(cè)試其對(duì)計(jì)算結(jié)果的影響。
圖10為采樣步長對(duì)采樣時(shí)間及優(yōu)化時(shí)間的影響曲線,測(cè)試模型為圖4b的RockArm模型,測(cè)試所用的采樣步長分別為2°、3°、4°、5°、6°、9°、10°、12°、15°、18°、20°、22°、25°、30°、36°、45°、55°、60°、80°、90°、180°。在利用無導(dǎo)數(shù)優(yōu)化算法進(jìn)行優(yōu)化計(jì)算時(shí),計(jì)算理論支撐體積最小的前100個(gè)采樣方向,在這100個(gè)采樣方向確定的區(qū)間內(nèi)進(jìn)行優(yōu)化計(jì)算。由圖10可以得到,對(duì)于采樣時(shí)間,當(dāng)采樣步長增大時(shí),采樣方向減小,在單次計(jì)算時(shí)間一定的情況下總的采樣時(shí)間縮短。對(duì)于優(yōu)化時(shí)間,當(dāng)采樣步長較小時(shí),在優(yōu)化方向數(shù)量確定的情況下,由于優(yōu)化區(qū)間較小,單次優(yōu)化時(shí)間也會(huì)縮短,因此總的優(yōu)化時(shí)間也較短。隨著采樣步長的增大,優(yōu)化區(qū)間增大,優(yōu)化時(shí)間也會(huì)相應(yīng)增長。當(dāng)采樣步長為25°時(shí),采樣方向的數(shù)量剛好為100,此時(shí)理論上的優(yōu)化時(shí)間應(yīng)該最長。在實(shí)際采樣過程中,由于模型的初始位置不同,用于局部優(yōu)化的各初始方向也不同,單次優(yōu)化時(shí)間也會(huì)所有變化,因此最長優(yōu)化時(shí)間對(duì)應(yīng)的采樣步長約為25°,但會(huì)有所波動(dòng)。當(dāng)采樣步長大于25°時(shí),采樣方向的個(gè)數(shù)小于100,隨著采樣步長增大,采樣方向的個(gè)數(shù)也隨之減少,因而優(yōu)化時(shí)間也隨著減短。
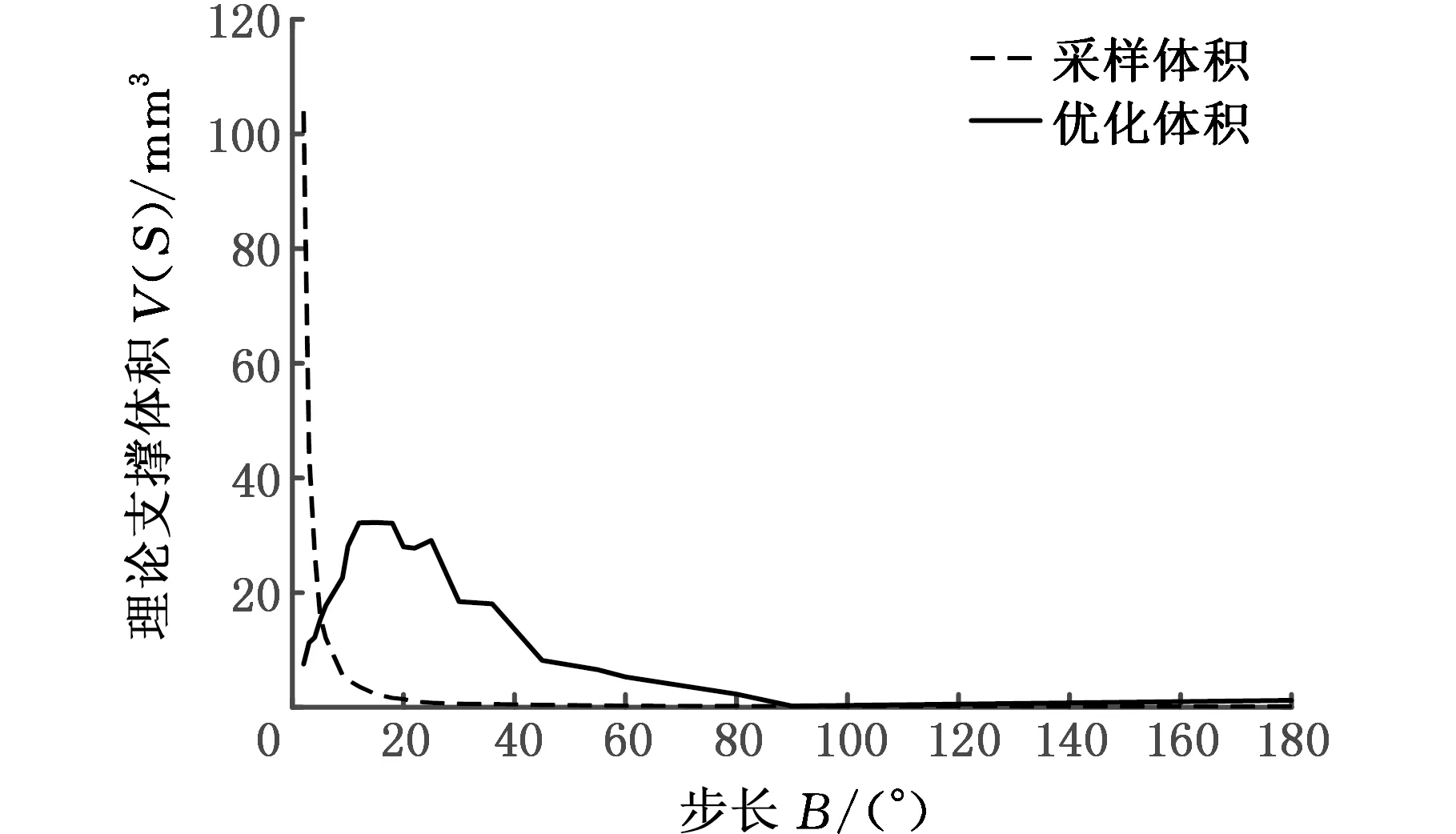
圖10 不同采樣步長的測(cè)試時(shí)間Fig.10 Test time of different sampling step
圖11所示為在不同采樣步長下,采樣得到的最小理論支撐體積與優(yōu)化后得到的最小理論支撐體積。從圖11中可以得到,當(dāng)測(cè)試過程中的采樣步長足夠小時(shí)(采樣步長的數(shù)值為2°、3°、6°時(shí)),經(jīng)采樣得到的最小理論支撐體積即為優(yōu)化后的最小理論支撐體積,不需要后續(xù)的優(yōu)化即可得到最優(yōu)打印方向;當(dāng)采樣步長較大時(shí)需要利用優(yōu)化算法才可得到最優(yōu)的打印方向;當(dāng)采樣步長超過一定的值時(shí),即使利用優(yōu)化算法也得不到最優(yōu)打印方向。
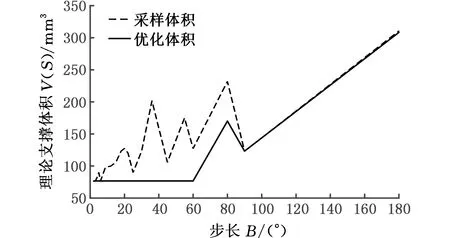
圖11 不同采樣步長的計(jì)算結(jié)果Fig.11 Calculation results of different sampling step
表1所示為不同網(wǎng)格模型的測(cè)試對(duì)比結(jié)果。在測(cè)試過程中,采樣步長為5°,共計(jì)算36×72=2 592個(gè)方向的理論支撐體積。在優(yōu)化過程中,選取理論支撐體積最小的前100個(gè)方向進(jìn)行優(yōu)化計(jì)算,分別計(jì)算模型三角面片個(gè)數(shù)、網(wǎng)格模型體積V(M)、最優(yōu)采樣方向理論支撐體積、最優(yōu)方向理論支撐體積、采樣時(shí)間及優(yōu)化時(shí)間。從表1中的計(jì)算結(jié)果可以得到,計(jì)算時(shí)間隨著模型三角面片個(gè)數(shù)的增加而增長。當(dāng)模型網(wǎng)格數(shù)量較小時(shí),本文算法效率非常高,即使模型三角面片個(gè)數(shù)為200 000,計(jì)算時(shí)間也短于180 s。當(dāng)模型三角面片個(gè)數(shù)太多時(shí),可先對(duì)模型進(jìn)行基于特征的簡化,減少模型三角面片個(gè)數(shù),然后再進(jìn)行打印方向的優(yōu)化。為了進(jìn)一步驗(yàn)證本文算法有效性,將本文算法與Autodesk公司的Meshmixer軟件進(jìn)行對(duì)比測(cè)試。在進(jìn)行對(duì)比測(cè)試時(shí),除了一個(gè)模型外,其余所有模型的最終打印方向與本文算法的結(jié)果基本一致,如圖12所示。在得到各自的最優(yōu)打印方向后,利用Meshmixer軟件提供的算法生成樹狀支撐結(jié)構(gòu),分別計(jì)算兩個(gè)不同最優(yōu)打印方向下的實(shí)際支撐體積。從結(jié)果可以看出,對(duì)于該測(cè)試模型,本文算法結(jié)果更優(yōu)。
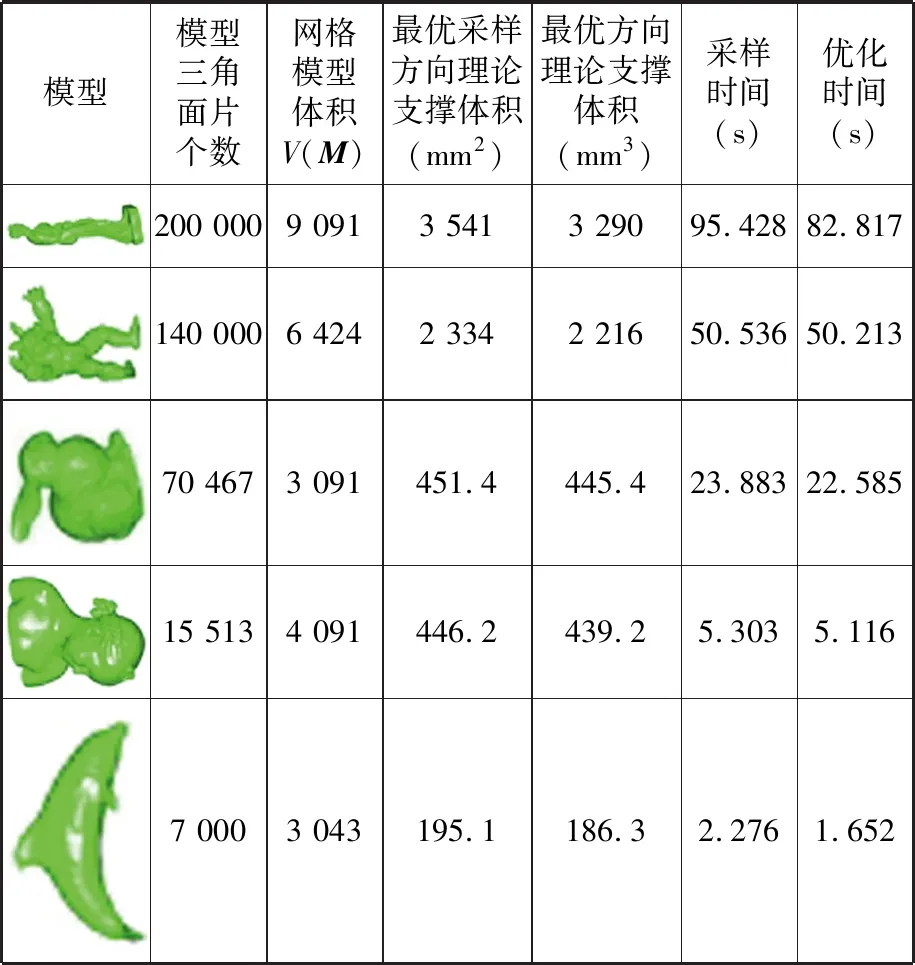
表1 不同模型測(cè)試結(jié)果
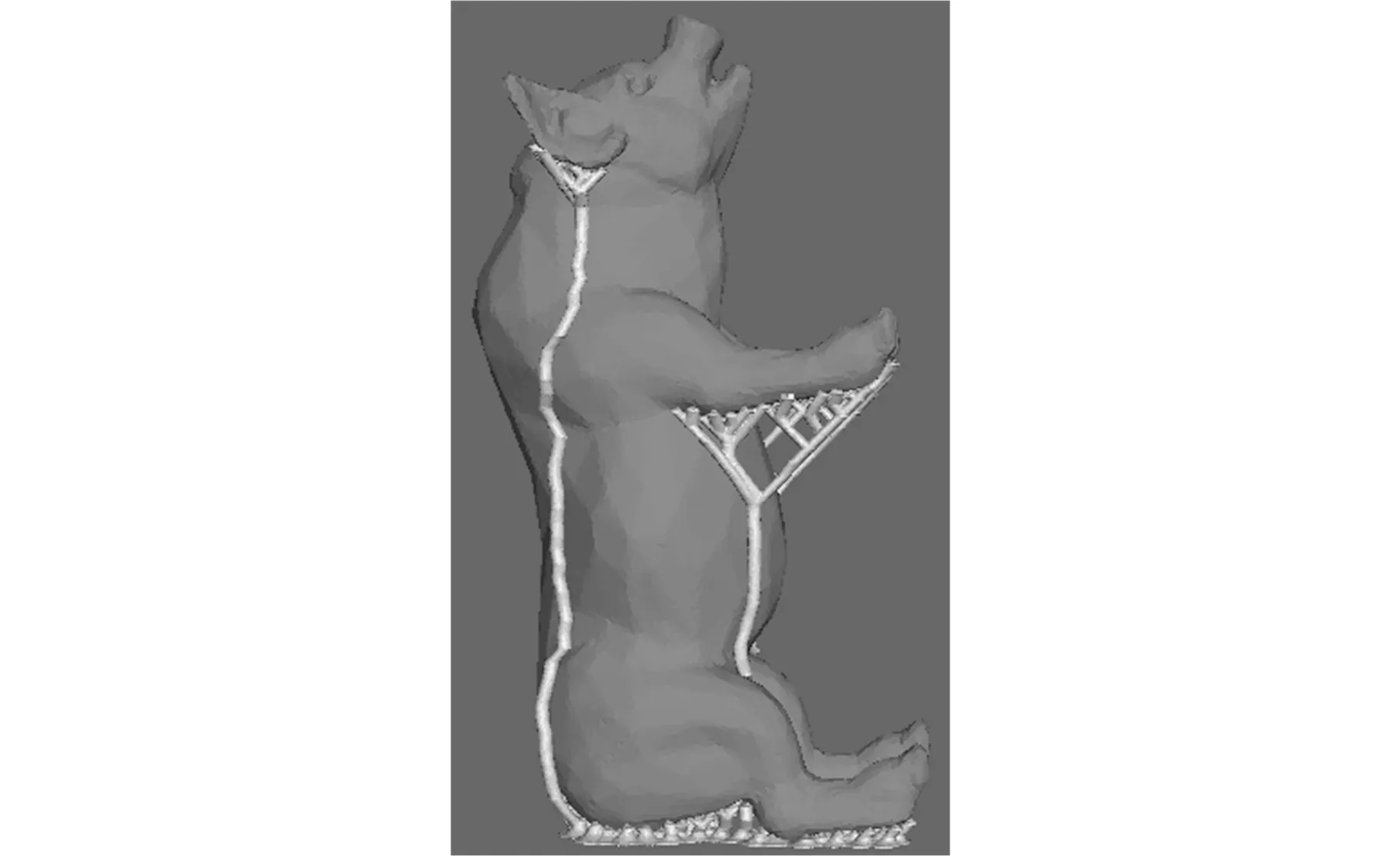
(b)本文算法計(jì)算結(jié)果圖12 結(jié)果比較Fig.12 Comparison of results
4 結(jié)論
(1)本文提出了一種基于最小理論支撐體積的模型三維打印方向的計(jì)算方法,該方法能夠快速準(zhǔn)確地計(jì)算最小理論支撐體積所對(duì)應(yīng)的模型打印方向,為模型三維打印方向提供了輔助的優(yōu)化方案。
(2)闡述了模型理論支撐體積的理論背景,給出了離散網(wǎng)格模型理論支撐體積的計(jì)算方法,同時(shí)針對(duì)凹模型的理論支撐體積的特殊性,利用光線追蹤的方法來計(jì)算凹模型的理論支撐體積。
(3)針對(duì)理論支撐體積函數(shù)不可導(dǎo)的特點(diǎn),利用無導(dǎo)數(shù)優(yōu)化算法來計(jì)算最小理論支撐體積所對(duì)應(yīng)的方向,該方法可采用并行運(yùn)算以加快計(jì)算速度。
(4)實(shí)驗(yàn)表明本文算法在計(jì)算精度和計(jì)算效率上都優(yōu)于已有的方法。
本文算法在計(jì)算方向時(shí)只考慮支撐體積這一單一因素,下一步研究將進(jìn)一步考慮三維打印的表面粗糙度、打印時(shí)間等多方面因素,增強(qiáng)算法的適用性。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
當(dāng)代陜西(2022年5期)2022-04-19 12:10:18
計(jì)算機(jī)應(yīng)用(2022年2期)2022-03-01 12:33:42
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:28
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
湘潮(上半月)(2021年4期)2021-07-20 08:05:28
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
計(jì)算機(jī)應(yīng)用(2021年4期)2021-04-20 14:06:36
計(jì)算機(jī)應(yīng)用(2021年1期)2021-01-21 03:22:38
