基于RBF神經(jīng)網(wǎng)絡(luò)的多移動(dòng)機(jī)械臂同步控制
2019-05-22 02:59:502
2
(1. 中國(guó)石油大學(xué)(華東) 化學(xué)工程學(xué)院,山東 青島 266580;2. 合肥通用機(jī)械研究院有限公司,安徽 合肥 230031)
在現(xiàn)代工業(yè)制造過(guò)程中,機(jī)械臂操作系統(tǒng)已經(jīng)迅速被開(kāi)發(fā)并得到了廣泛應(yīng)用,例如組裝、運(yùn)輸、焊接、噴漆以及其他各種高危高難度的復(fù)雜任務(wù)[1-2]。這些任務(wù)需要大量的操作和很好的可操控性,其中大多數(shù)都不能通過(guò)一個(gè)單獨(dú)的機(jī)械臂來(lái)實(shí)現(xiàn)。而固定基座機(jī)械臂系統(tǒng)的工作空間有一定的局限性,因此,多移動(dòng)機(jī)械臂的應(yīng)用得到了廣泛的關(guān)注[3-4]。多移動(dòng)機(jī)械臂系統(tǒng)是一種復(fù)雜的強(qiáng)耦合時(shí)變系統(tǒng),具有極強(qiáng)的非線性特征。多個(gè)機(jī)械臂之間如何協(xié)同配合,以及怎樣解決兩個(gè)子系統(tǒng)之間的耦合關(guān)系,對(duì)其建立統(tǒng)一數(shù)學(xué)模型并設(shè)計(jì)同步控制器,成為該系統(tǒng)同步控制問(wèn)題的關(guān)鍵[5-6]。對(duì)于多移動(dòng)機(jī)械臂同步控制問(wèn)題的研究,國(guó)內(nèi)外的諸多學(xué)者近幾年已經(jīng)取得了很大的進(jìn)展[7]。
林冠楠[8]針對(duì)移動(dòng)機(jī)械臂的同步控制問(wèn)題,將運(yùn)動(dòng)解耦、機(jī)械臂與移動(dòng)平臺(tái)分開(kāi)進(jìn)行控制,分別針對(duì)兩者設(shè)計(jì)了基于自抗擾技術(shù)的同步控制器。Liu等[9]針對(duì)機(jī)械臂系統(tǒng)的無(wú)源化控制,研究了動(dòng)力學(xué)參數(shù)不同的機(jī)械臂任務(wù)空間同步控制方法。方牧等[10]對(duì)各移動(dòng)機(jī)械臂在關(guān)節(jié)空間做了軌跡規(guī)劃,并設(shè)計(jì)了基于模型參考的自適應(yīng)控制器,但當(dāng)較強(qiáng)的耦合關(guān)系存在于多個(gè)移動(dòng)機(jī)械臂之間時(shí)該控制器并不能獲得很好的控制性能。Desai等[11]對(duì)移動(dòng)平臺(tái)的軌跡進(jìn)行了規(guī)劃,為保證末端機(jī)械手能夠穩(wěn)定操作物體設(shè)計(jì)了相應(yīng)的控制器,但移動(dòng)機(jī)械臂末端機(jī)械手對(duì)被操作物體所施加作用力的魯棒性該控制方法無(wú)法實(shí)現(xiàn)。Sugar等[12]針對(duì)多移動(dòng)機(jī)械臂系統(tǒng)設(shè)計(jì)了基于主從式通信網(wǎng)絡(luò)的同步控制算法,主動(dòng)移動(dòng)機(jī)械臂的路徑方案和力規(guī)劃可以依靠自身來(lái)完成,從動(dòng)移動(dòng)機(jī)械臂與主動(dòng)移動(dòng)機(jī)械臂的運(yùn)動(dòng)狀態(tài)保持一致,對(duì)各自期望軌跡的追蹤可以通過(guò)所設(shè)計(jì)的控制器來(lái)完成。
雖然關(guān)于多移動(dòng)機(jī)械臂的同步控制問(wèn)題到目前為止已經(jīng)取得了很大進(jìn)展,但系統(tǒng)不確定性和主動(dòng)控制力矩的估計(jì)等問(wèn)題并沒(méi)有得到很好的解決,許多先進(jìn)控制算法如RBF(radial basis function,徑向基函數(shù))神經(jīng)網(wǎng)絡(luò)等,未在多移動(dòng)機(jī)械臂系統(tǒng)的同步控制中得到充分的應(yīng)用。因此,本研究在對(duì)多移動(dòng)機(jī)械臂系統(tǒng)動(dòng)力學(xué)特性進(jìn)行分析的基礎(chǔ)上,基于RBF神經(jīng)網(wǎng)絡(luò),設(shè)計(jì)了一種新的自適應(yīng)主從同步控制器,解決多移動(dòng)機(jī)械臂系統(tǒng)同步控制的相關(guān)問(wèn)題。
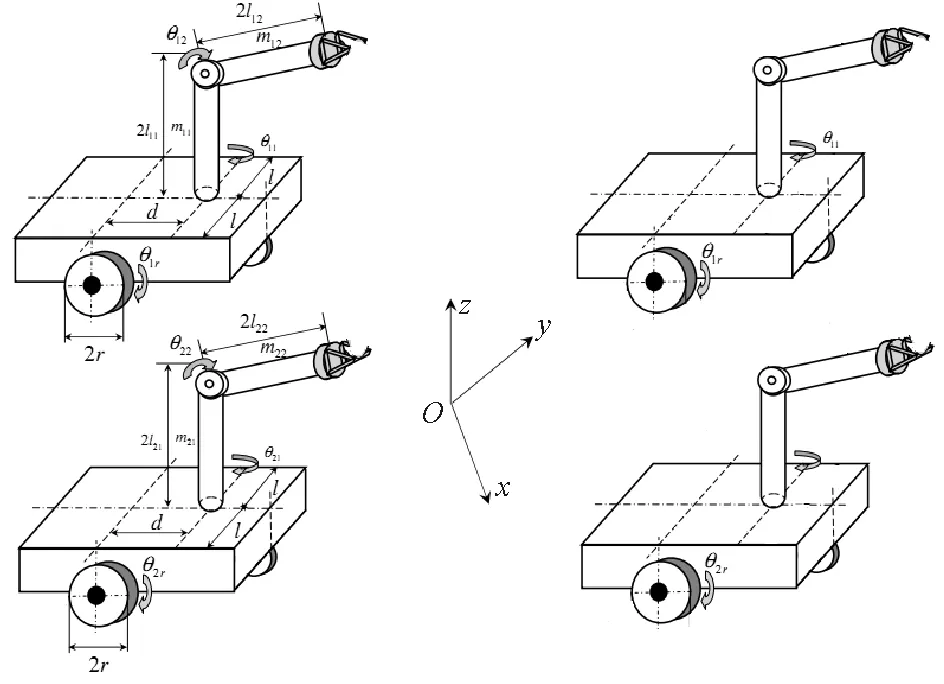
圖1 多移動(dòng)機(jī)械臂主從同步控制系統(tǒng)Fig.1 Synchronous control system of multiple mobile manipulators
1 系統(tǒng)描述
1.1 動(dòng)力學(xué)模型
考慮如圖1所示的多移動(dòng)機(jī)械臂系統(tǒng),由一個(gè)主動(dòng)機(jī)械臂和n個(gè)從動(dòng)機(jī)械臂所構(gòu)成,且所有機(jī)械臂均具有同樣的結(jié)構(gòu)和動(dòng)力學(xué)參數(shù),系統(tǒng)模型如圖1所示。
在關(guān)節(jié)空間內(nèi),其拉格朗日動(dòng)力學(xué)方程可以表示為:

(1)

消掉微分約束引入的約束力項(xiàng),多移動(dòng)機(jī)械臂系統(tǒng)動(dòng)力學(xué)方程可化為:
(2)


(3)

1.2 系統(tǒng)同步誤差
將主、從動(dòng)機(jī)械臂間的同步誤差定義為如下形式:
εi=xi-x0。
(4)
將公式(3)代入并整理可得:

(5)
則本研究的控制任務(wù)為:基于RBF神經(jīng)網(wǎng)絡(luò),根據(jù)誤差方程式(5),設(shè)計(jì)一種多移動(dòng)機(jī)械臂系統(tǒng)的同步控制算法,對(duì)系統(tǒng)未知項(xiàng)進(jìn)行估計(jì)和補(bǔ)償,使同步誤差最終收斂至零,從而實(shí)現(xiàn)多移動(dòng)機(jī)械臂系統(tǒng)的主從同步控制。
2 RBF神經(jīng)網(wǎng)絡(luò)主從同步控制器設(shè)計(jì)
根據(jù)已有相關(guān)文獻(xiàn)可知,RBF神經(jīng)網(wǎng)絡(luò)在非線性系統(tǒng)中已獲得一定的應(yīng)用,并且能夠?qū)ο到y(tǒng)非線性進(jìn)行補(bǔ)償[13-14]。所以,本研究將利用RBF神經(jīng)網(wǎng)絡(luò)對(duì)未知狀態(tài)進(jìn)行估計(jì),并針對(duì)上述機(jī)械臂系統(tǒng),設(shè)計(jì)一種自適應(yīng)主從同步控制算法,使得該系統(tǒng)在存在系統(tǒng)不確定性和外界干擾的情況下也可以實(shí)現(xiàn)同步運(yùn)動(dòng),完成上節(jié)所述的同步控制任務(wù)[15]。
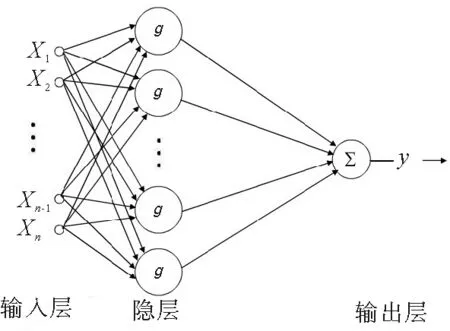
圖2 RBF神經(jīng)網(wǎng)絡(luò)映射關(guān)系Fig.2 Mapping relations ofRBF neural network
2.1 徑向基函數(shù)神經(jīng)網(wǎng)絡(luò)
RBF神經(jīng)網(wǎng)絡(luò)由輸入層、隱層和輸出層構(gòu)成[16],具有很好的泛化能力,可以使學(xué)習(xí)速率大幅提升,符合實(shí)時(shí)控制的條件,并且能夠防止局部極小值的出現(xiàn)。
輸入向量x與輸出y之間的映射關(guān)系可以用如下公式來(lái)表示:

(6)

其中,l∈Rmr是一個(gè)緊集,n*的值可以根據(jù)f(x)、ε0合理選擇。
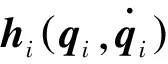
圖3 基于高斯基函數(shù)的隸屬度函數(shù)Fig.3 Membership function based on gauss function
2.2 從動(dòng)移動(dòng)機(jī)械臂動(dòng)力學(xué)補(bǔ)償
矩陣注1:對(duì)于矩陣R,其弗羅貝尼烏斯矩陣范數(shù)定義為如下形式:

其中,tr(·)表示矩陣的跡。
假設(shè)3:神經(jīng)網(wǎng)絡(luò)中所有權(quán)重系數(shù)矩陣均從屬于一個(gè)大的緊集B(Mθi){θi:θiF≤Mθi},其中,任意R(Mθi)>0是均為正數(shù)。那么:

(7)
定義由RBF神經(jīng)網(wǎng)絡(luò)引入的建模誤差ηi為:
ηi
建模誤差ηi的有限正定常數(shù)上界η0i定義為:
η0i
漏電保護(hù)器按其保護(hù)功能和結(jié)構(gòu)特征分類:漏電保護(hù)開(kāi)關(guān).它由零序電流互感器、漏電脫扣器和主開(kāi)關(guān)組裝在一絕緣外殼之中,具有漏電保護(hù)及手動(dòng)通斷電路的功能,但不具有過(guò)負(fù)荷和短路保護(hù)的功能.這類產(chǎn)品主要用于住宅,通稱漏電開(kāi)關(guān).漏電斷路器.它是在低壓斷路器的基礎(chǔ)上加裝漏電保護(hù)部件組成,具有漏電保護(hù)和過(guò)負(fù)荷及短路保護(hù)的功能.它在家用及類似場(chǎng)所廣泛應(yīng)用.漏電繼電器.它由零序電流互感器和繼電器組成,具有檢測(cè)和判斷漏電和接地故障的功能,由繼電器發(fā)出信號(hào),并控制斷路器或接觸器切斷電路.漏電保護(hù)插座.它由漏電開(kāi)關(guān)或漏電斷路器與插座組合而成,使插座回路連接的設(shè)備具有漏電保護(hù)功能.

2.3 主動(dòng)移動(dòng)機(jī)械臂控制力矩估計(jì)
假設(shè)4:神經(jīng)網(wǎng)絡(luò)所有的權(quán)重系數(shù)都屬于一個(gè)大的緊集B(Mθ0){θ0:θ0F≤Mθ0},其中任意R(Mθ0)>0是均為正數(shù)。那么:

(8)
定義由RBF神經(jīng)網(wǎng)絡(luò)引入的建模誤差η0l為:
η0l


2.4 主從同步控制器設(shè)計(jì)
在前面兩節(jié)的基礎(chǔ)上,基于RBF神經(jīng)網(wǎng)絡(luò)的多移動(dòng)機(jī)械臂分布式自適應(yīng)同步控制器可以設(shè)計(jì)為如下形式:
τi=τ1+τ2+τ3,
(9)
(10)
(11)
(12)
(13)
(14)
(15)
在控制器設(shè)計(jì)中,τi1用來(lái)抵消哥氏力和重力;τi2可以消除主從機(jī)械臂間的同步誤差;τi3可以抵消主動(dòng)機(jī)械臂輸入力矩的擾動(dòng)。
2.5 Lyapunov穩(wěn)定性分析
將2.4節(jié)設(shè)計(jì)的控制器代入式(5),可得:
(16)


(17)


定理1在滿足假設(shè)1~5的條件下,針對(duì)公式(1)、(2)所示的多移動(dòng)機(jī)械臂系統(tǒng),在主從同步控制律(9)~(15)的作用下,通過(guò)適當(dāng)?shù)剡x取矩陣Q≥0,可以在任意初始狀態(tài)下,使從動(dòng)移動(dòng)機(jī)械臂對(duì)主動(dòng)機(jī)械臂移動(dòng)軌跡實(shí)現(xiàn)跟蹤,且同步誤差εi可以收斂至一個(gè)小的剩余集。
證明:選擇式(18)所示的Lyapunov函數(shù)
(18)
將公式(18)兩邊同時(shí)對(duì)時(shí)間求導(dǎo)可得:

利用文獻(xiàn)[18]中的方法對(duì)方程進(jìn)行放縮,可得:
將控制器中自適應(yīng)律(13)、(14)帶入并整理可得:

上述李雅普諾夫函數(shù)的微分不等式可整理為:

(19)

3 Matlab仿真驗(yàn)證
選取由5個(gè)二連桿機(jī)械臂構(gòu)成的多移動(dòng)機(jī)械臂系統(tǒng),進(jìn)行Matlab仿真,驗(yàn)證本研究所提出的主從同步控制律(9)~(15)的穩(wěn)定性和有效性。其中下標(biāo)1表示主動(dòng)機(jī)械臂,其余為從動(dòng)機(jī)械臂。
3.1 基本參數(shù)設(shè)定
機(jī)械臂動(dòng)力學(xué)方程如下:
其中,模型不確定性為如下形式:

相關(guān)參數(shù)設(shè)置為:
m0=50 kg,m1=4 kg,m2=3.5 kg,R=0.3 m,d=0.3 m,J0=1.417 kg·m2,
J1=0.03 kg·m2,J2=0.036 kg·m2,r=0.1 m,L1=0.5 m,L2=0.35 m。
主動(dòng)移動(dòng)機(jī)械臂期望軌跡如下:
xcd=0.2t,ycd=0.2t,
xEd=0.2t,yEd=0.1sin(2t)+0.2t+0.15。
各移動(dòng)機(jī)械臂的初始狀態(tài)分別設(shè)置為:

反饋增益K及自適應(yīng)律相關(guān)參數(shù)γ0、γi等分別設(shè)置為:

拉普拉斯矩陣L、D以及所選擇的正定矩陣Q、常數(shù)δ分別設(shè)置為:
圖4 通訊拓?fù)浣Y(jié)構(gòu)Fig.4 Communication topology structure
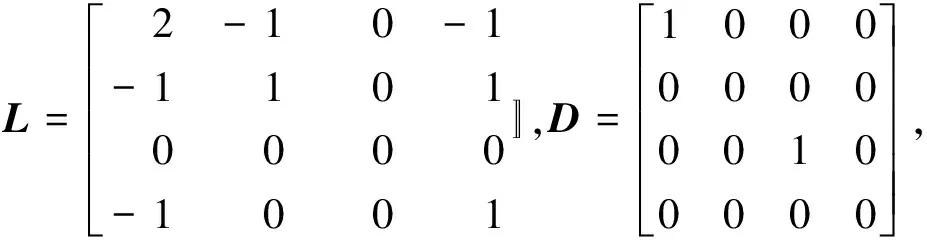
Q=10.267 9×diag(1,1,1,1,1,1,1,1),
δ=0.367 9。
選取如圖4中的通訊拓?fù)浣Y(jié)構(gòu)。其中,信息可以由主動(dòng)移動(dòng)機(jī)械臂1傳遞給從動(dòng)移動(dòng)機(jī)械臂2和4,但無(wú)法反向進(jìn)行傳遞。
3.2 Matlab仿真結(jié)果及分析
在上述研究基礎(chǔ)上對(duì)此多移動(dòng)機(jī)械臂系統(tǒng)進(jìn)行Matlab仿真,仿真結(jié)果見(jiàn)圖5~14。
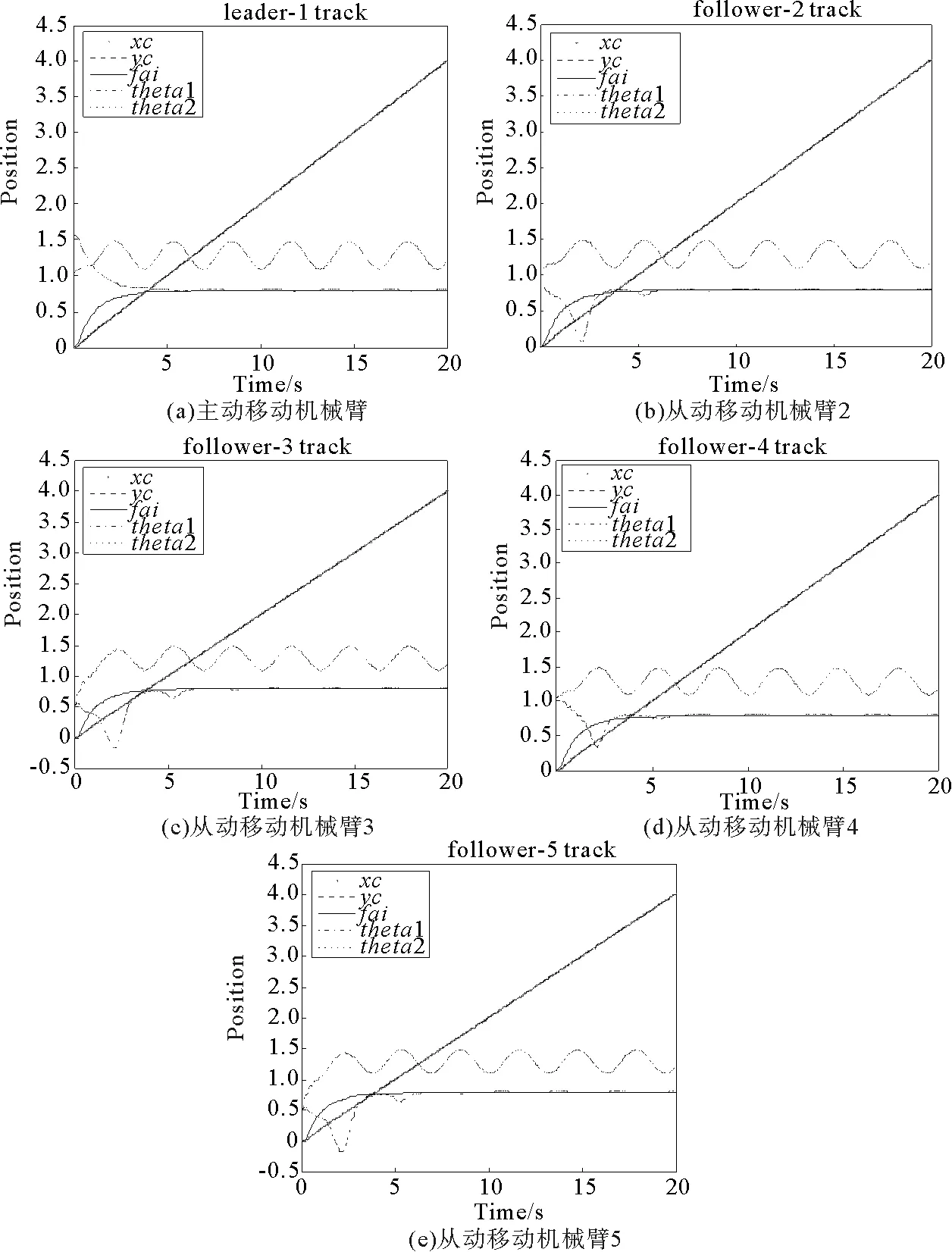
圖5 主動(dòng)移動(dòng)機(jī)械臂及從動(dòng)移動(dòng)機(jī)械臂2~5運(yùn)動(dòng)軌跡Fig.5 Movement trajectories of leader mobile robot and follower mobile robots 2-5
通過(guò)仿真結(jié)果圖5可以看出,多移動(dòng)機(jī)械臂系統(tǒng)在主從同步控制器(9)~(15)的控制作用下,主動(dòng)機(jī)械臂可以對(duì)預(yù)定軌跡實(shí)現(xiàn)快速跟蹤;從動(dòng)機(jī)械臂在初始狀態(tài)各不相同的情況下,也可以快速對(duì)主動(dòng)機(jī)械臂移動(dòng)軌跡進(jìn)行跟蹤,并且整個(gè)系統(tǒng)在達(dá)到穩(wěn)定狀態(tài)后未再產(chǎn)生較大波動(dòng)。
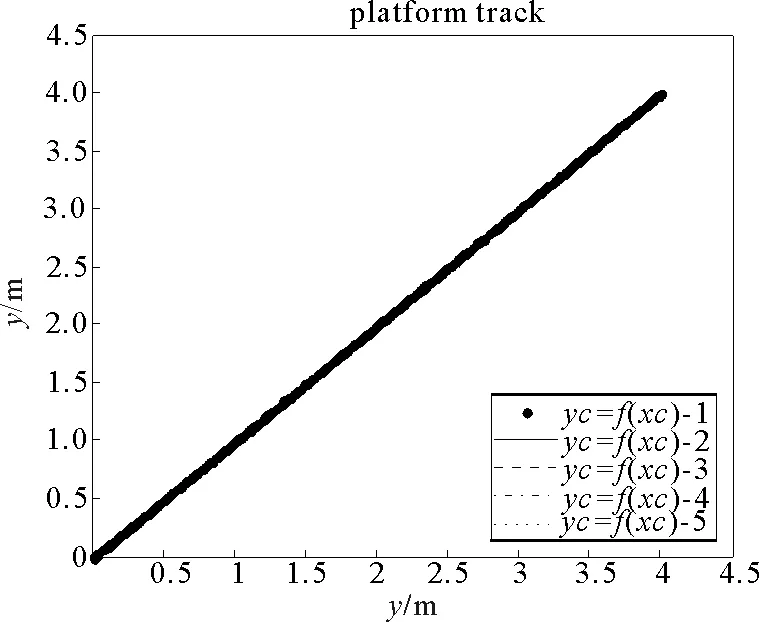
圖6 各移動(dòng)平臺(tái)質(zhì)心位置Fig.6 Mass center position of each mobile platform
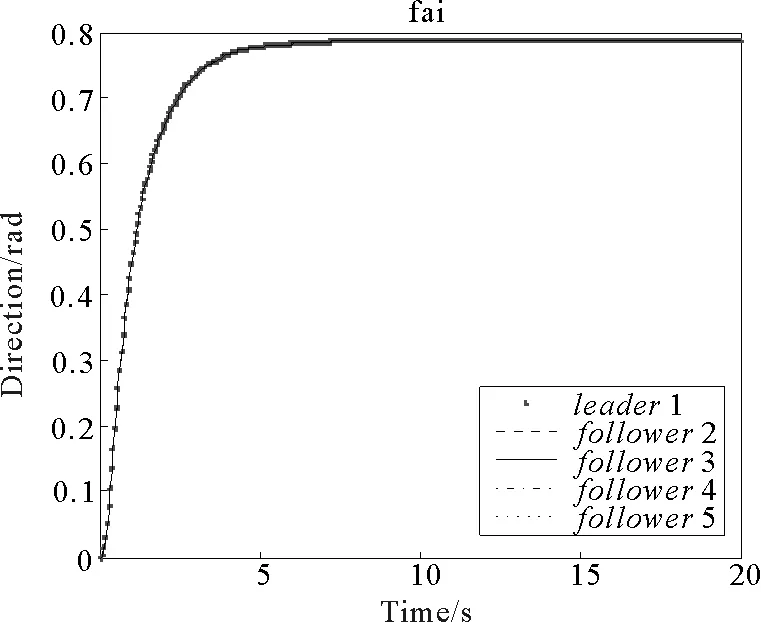
圖7 各移動(dòng)平臺(tái)方向角Fig.7 Direction angle of each mobile platform
由仿真結(jié)果圖6~7可以看出,在同步控制器(9)~(15)的控制下,各平臺(tái)移動(dòng)軌跡及前進(jìn)方向角均保持相同,即能夠準(zhǔn)確使平臺(tái)間誤差收斂到零,從而為多移動(dòng)機(jī)械臂系統(tǒng)實(shí)現(xiàn)同步運(yùn)動(dòng)提供了保證。
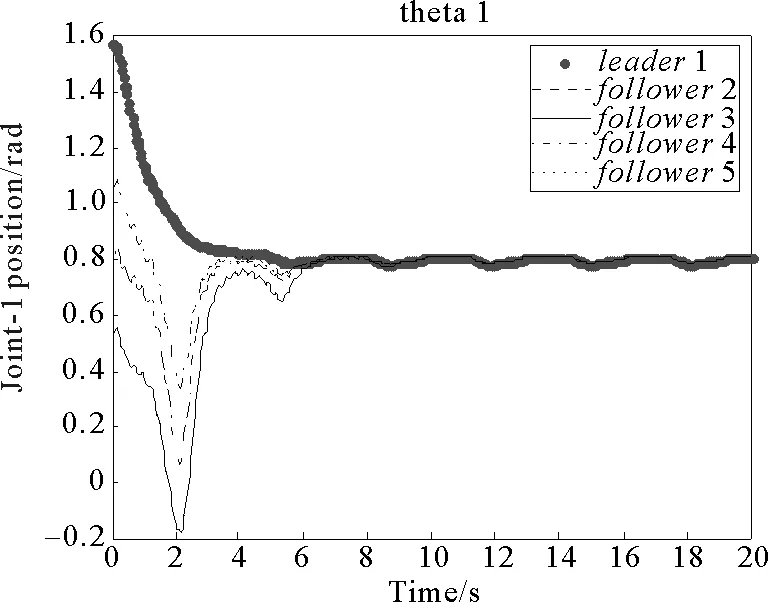
圖8 關(guān)節(jié)1位置變化曲線Fig.8 Position change curve of joint 1
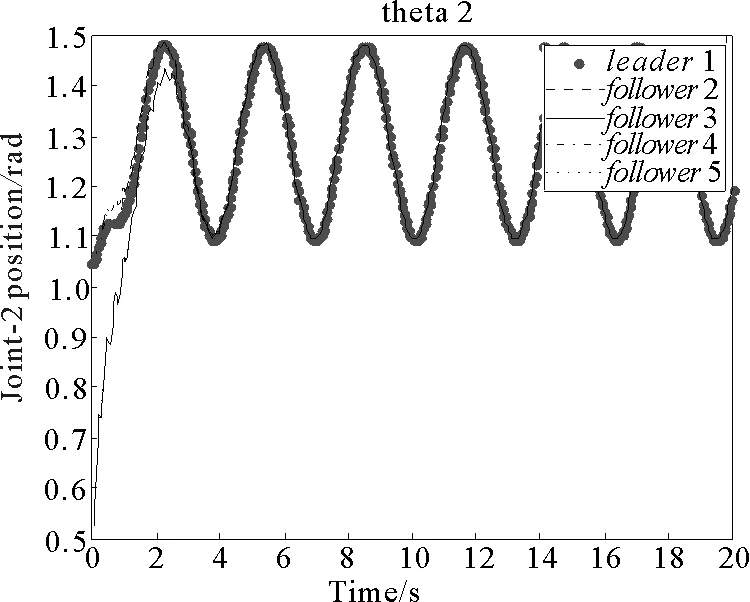
圖9 關(guān)節(jié)2位置變化曲線Fig.9 Position change curve of joint 2
通過(guò)仿真結(jié)果圖8和圖9可以看出,在7 s左右時(shí),主動(dòng)移動(dòng)機(jī)械臂和從動(dòng)移動(dòng)機(jī)械臂中關(guān)節(jié)1的位置誤差基本漸近收斂到零;在4 s左右時(shí),主、從移動(dòng)機(jī)械臂關(guān)節(jié)2的位置誤差基本漸近收斂到零,且穩(wěn)定后均不再發(fā)生較大波動(dòng)。在4~7 s之間時(shí),關(guān)節(jié)1和關(guān)節(jié)2同步誤差共同漸近收斂到零。由仿真結(jié)果圖10可以看出,在4 s左右時(shí),各移動(dòng)平臺(tái)方向的角速度誤差能夠收斂到零。由圖11和圖12可知,分別在10 s和8 s左右時(shí),各移動(dòng)機(jī)械臂關(guān)節(jié)1和關(guān)節(jié)2處的速度誤差均能分別漸近收斂到零。
綜合分析仿真結(jié)果圖11~12可知:通過(guò)適當(dāng)?shù)剡x擇控制器參數(shù),在本研究所設(shè)計(jì)的主從同步控制算法(9)~(15)的控制作用下,在初始階段即使存在一定偏差,同理論分析一樣,從動(dòng)移動(dòng)機(jī)械臂的平臺(tái)方向角速度及二連桿機(jī)械臂兩個(gè)關(guān)節(jié)的運(yùn)動(dòng)速度均能迅速、高精度地同步于主動(dòng)機(jī)械臂,即主、從機(jī)械臂之間的速度誤差能夠收斂到零,且在達(dá)到穩(wěn)定狀態(tài)之后不再發(fā)生較大波動(dòng)。
通過(guò)仿真結(jié)果圖13~14可知,各移動(dòng)機(jī)械臂的輸入力矩均有界。
綜合分析仿真結(jié)果5~14,可以得到如下結(jié)論:在考慮各移動(dòng)機(jī)械臂中移動(dòng)平臺(tái)和二連桿機(jī)械臂之間交互影響條件下,通過(guò)合理設(shè)計(jì)控制器參數(shù),利用所提出的基于RBF神經(jīng)網(wǎng)絡(luò)的主從同步控制算法(9)~(15),可以抵消主動(dòng)移動(dòng)機(jī)械臂輸入控制力矩的影響,估計(jì)從動(dòng)移動(dòng)機(jī)械臂的建模誤差并進(jìn)行補(bǔ)償,使各移動(dòng)機(jī)械臂之間同步誤差漸近收斂到零,保證多移動(dòng)機(jī)械臂實(shí)現(xiàn)同步運(yùn)動(dòng)。
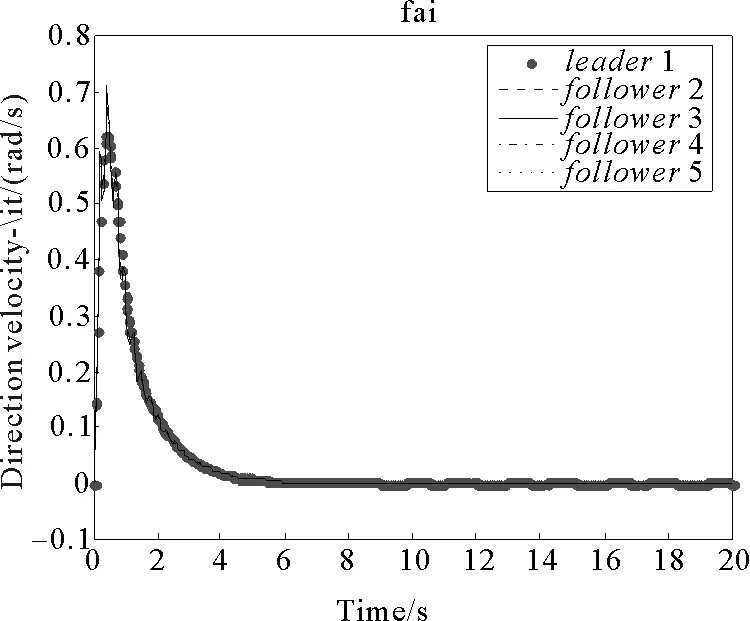
圖10 各移動(dòng)平臺(tái)方向角速度變化曲線Fig.10 Angular velocity curve of each mobile platform
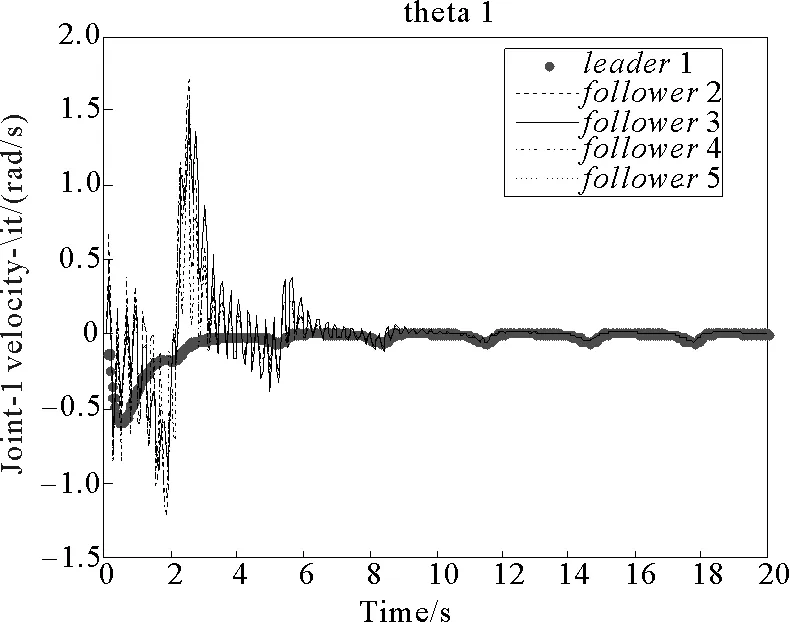
圖11 關(guān)節(jié)1速度變化曲線Fig.11 Velocity change curve of joint 1
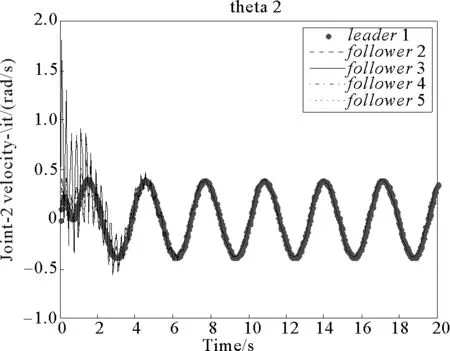
圖12 關(guān)節(jié)2速度變化曲線 Fig.12 Velocity change curve of joint 2
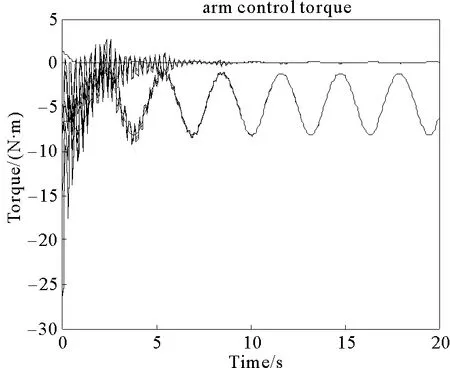
圖13 主從機(jī)械臂二連桿關(guān)節(jié)驅(qū)動(dòng)力矩Fig.13 Joint driving torque of the two connectingrod of the leader and follower manipulators
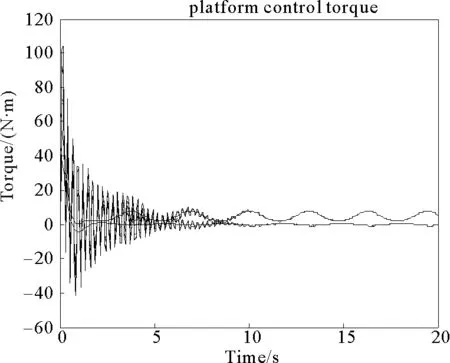
圖14 主從移動(dòng)機(jī)械臂移動(dòng)平臺(tái)左右輪驅(qū)動(dòng)力矩Fig.14 Left and right wheel driving torques of the platforms of the leader and follower manipulators
4 結(jié)論
利用RBF神經(jīng)網(wǎng)絡(luò)和領(lǐng)導(dǎo)者-追隨者通信拓?fù)涞姆椒ǎ槍?duì)多移動(dòng)機(jī)械臂同步控制系統(tǒng),設(shè)計(jì)了一種新的分布式自適應(yīng)主從同步控制算法。主要結(jié)論有:
1) 主動(dòng)移動(dòng)機(jī)械臂和從動(dòng)移動(dòng)機(jī)械臂之間的同步誤差通過(guò)領(lǐng)導(dǎo)者-追隨者通信拓?fù)渚W(wǎng)絡(luò)結(jié)構(gòu)來(lái)進(jìn)行了定義;
2) 利用RBF神經(jīng)網(wǎng)絡(luò),對(duì)從動(dòng)移動(dòng)機(jī)械臂的模型誤差等系統(tǒng)不確定性進(jìn)行了逼近和補(bǔ)償,并對(duì)主動(dòng)移動(dòng)機(jī)械臂的控制力矩進(jìn)行了估計(jì);
3) 所設(shè)計(jì)的同步控制器可以使同步誤差漸進(jìn)收斂到零,在存在較大初始誤差的情況下也能夠?qū)崿F(xiàn)多移動(dòng)機(jī)械臂的同步控制。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
電腦報(bào)(2020年35期)2020-09-17 13:25:53
當(dāng)代工人(2020年8期)2020-05-25 09:07:38
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
電腦報(bào)(2019年40期)2019-09-10 07:22:44
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
小溪流(畫(huà)刊)(2017年12期)2018-01-10 16:07:29
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
 山東科技大學(xué)學(xué)報(bào)(自然科學(xué)版)2019年3期
山東科技大學(xué)學(xué)報(bào)(自然科學(xué)版)2019年3期
- 山東科技大學(xué)學(xué)報(bào)(自然科學(xué)版)的其它文章
- 基于ARIMA預(yù)測(cè)模型和混合補(bǔ)償算法的醫(yī)用耗材檢漏儀應(yīng)用研究
- 破膠程度對(duì)壓裂返排液水力旋流器內(nèi)流場(chǎng)及分離效果的研究
- 不連續(xù)時(shí)滯分?jǐn)?shù)階憶阻神經(jīng)網(wǎng)絡(luò)的非線性動(dòng)力學(xué)分析
- 不同階次的分?jǐn)?shù)階復(fù)值混沌系統(tǒng)的廣義投影同步和廣義錯(cuò)位投影同步
- 分?jǐn)?shù)階Langford系統(tǒng)的穩(wěn)定性分析
- 沂沭斷裂帶中段南小堯金礦地球化學(xué)特征及礦床成因探討