基于ELM實(shí)現(xiàn)的IPMSM轉(zhuǎn)矩觀測(cè)器
2019-05-27 03:43:20厲亞強(qiáng)張文濤李涉川
微特電機(jī) 2019年5期
關(guān)鍵詞:模型
厲亞強(qiáng),張文濤,李涉川
(桂林電子科技大學(xué), 桂林 541004)
0 引 言
內(nèi)置式永磁同步電機(jī)(以下簡(jiǎn)稱IPMSM)由于其功率因數(shù)高、起動(dòng)轉(zhuǎn)矩大、起動(dòng)時(shí)間較短、過(guò)載能力強(qiáng)等優(yōu)點(diǎn),在機(jī)械臂、機(jī)器人、電動(dòng)汽車等領(lǐng)域得到廣泛應(yīng)用[1]。目前,隨著電機(jī)控制技術(shù)、高精度傳感器技術(shù)以及新型電機(jī)控制理論的快速發(fā)展,IPMSM控制系統(tǒng)的研究以及應(yīng)用越來(lái)越受到當(dāng)今電機(jī)控制領(lǐng)域研究人員的重視。
IPMSM由于其參數(shù)的非線性、波動(dòng)性和不確定性等原因,準(zhǔn)確控制電機(jī)轉(zhuǎn)矩具有一定的難度。由于電機(jī)工作狀態(tài)下直接測(cè)量真實(shí)轉(zhuǎn)矩的成本較高,并且轉(zhuǎn)矩的直接測(cè)量受到儀器精度和儀器響應(yīng)速度的影響比較大,因此通常通過(guò)算法來(lái)實(shí)現(xiàn)對(duì)電機(jī)轉(zhuǎn)矩的觀測(cè)[2]。文獻(xiàn)[3]提出了一種新型趨近律的永磁同步電機(jī)超扭曲滑模直接轉(zhuǎn)矩控制方法,該方法將轉(zhuǎn)矩和磁鏈作為被控對(duì)象,通過(guò)引入飽和函數(shù)代替?zhèn)鹘y(tǒng)滯環(huán)比較器的方式,使轉(zhuǎn)矩脈動(dòng)減小了50%;文獻(xiàn)[4]提出了一種基于最大轉(zhuǎn)矩電流比的轉(zhuǎn)矩預(yù)測(cè)控制系統(tǒng),并對(duì)該系統(tǒng)性能進(jìn)行了相關(guān)分析;文獻(xiàn)[5]介紹了將觀測(cè)轉(zhuǎn)矩的前饋補(bǔ)償融合到控制器中,從而形成了二自由度的控制器,該控制器在響應(yīng)速度和魯棒性方面有較好的性能;文獻(xiàn)[6]中的控制方案指出了IPMSM在負(fù)載轉(zhuǎn)矩波動(dòng)時(shí),通過(guò)引入前饋補(bǔ)償可以有效地減少轉(zhuǎn)速波動(dòng),從而提升控制系統(tǒng)的動(dòng)態(tài)性能。傳統(tǒng)的控制方法都存在時(shí)效性不高、轉(zhuǎn)矩波動(dòng)抑制能力差等問(wèn)題,然而這些問(wèn)題可由神經(jīng)網(wǎng)絡(luò)解決。
近年來(lái),人工智能的核心技術(shù)神經(jīng)網(wǎng)絡(luò)以其高速的實(shí)時(shí)處理速度和強(qiáng)大的計(jì)算能力獲得了廣大電機(jī)控制學(xué)者的青睞,由于不需要準(zhǔn)確的電機(jī)非線性參數(shù),這使得準(zhǔn)確觀測(cè)電機(jī)轉(zhuǎn)矩變得更加容易[7]。文獻(xiàn)[8]將RBF(徑向基函數(shù))神經(jīng)網(wǎng)絡(luò)應(yīng)用于永磁同步電機(jī)PID參數(shù)調(diào)整中;文獻(xiàn)[9]采用了反向傳播神經(jīng)網(wǎng)絡(luò)(以下簡(jiǎn)稱BP神經(jīng)網(wǎng)絡(luò))對(duì)無(wú)刷電機(jī)進(jìn)行控制仿真設(shè)計(jì);文獻(xiàn)[10]采用深度學(xué)習(xí)方法對(duì)永磁同步電機(jī)做性能分析。但是深度學(xué)習(xí)模型如CNN,RNN,LSTM等雖然較普通神經(jīng)網(wǎng)絡(luò)有更強(qiáng)的非線性擬合能力,但是其訓(xùn)練優(yōu)化比較困難,而且在目前的MATLAB版本中無(wú)法直接生成可用的Simulink模塊,不能實(shí)際應(yīng)用,故本文設(shè)計(jì)選用能直接實(shí)用的神經(jīng)網(wǎng)絡(luò)。
基于極限學(xué)習(xí)機(jī)(以下簡(jiǎn)稱ELM)神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)簡(jiǎn)單、訓(xùn)練快、非線性擬合能力強(qiáng)等優(yōu)點(diǎn),本文研究了用ELM神經(jīng)網(wǎng)絡(luò)設(shè)計(jì)的轉(zhuǎn)矩觀測(cè)器代替數(shù)學(xué)模型來(lái)觀測(cè)電機(jī)轉(zhuǎn)矩,并將所觀測(cè)的轉(zhuǎn)矩作為前饋補(bǔ)償,準(zhǔn)確控制電機(jī)輸出轉(zhuǎn)矩的IPMSM轉(zhuǎn)矩控制方法。同時(shí),用實(shí)驗(yàn)驗(yàn)證了該結(jié)論的正確性。實(shí)驗(yàn)結(jié)果表明,基于ELM神經(jīng)網(wǎng)絡(luò)的電機(jī)轉(zhuǎn)矩觀測(cè)器可以準(zhǔn)確觀測(cè)電機(jī)轉(zhuǎn)矩并能較好地抑制轉(zhuǎn)矩波動(dòng)。
1 控制技術(shù)與神經(jīng)網(wǎng)絡(luò)
1.1 Clarke變換
Clarke變換是將三相靜止坐標(biāo)系轉(zhuǎn)換為二相靜止坐標(biāo)系的變換,又稱3s/2s變換[11],如圖1所示,A,B,C繞組為對(duì)稱三相繞組,匝數(shù)均為NA;α,β軸繞組為正交二相繞組,匝數(shù)均為Nα;α軸繞組方向與A相繞組軸線一致。
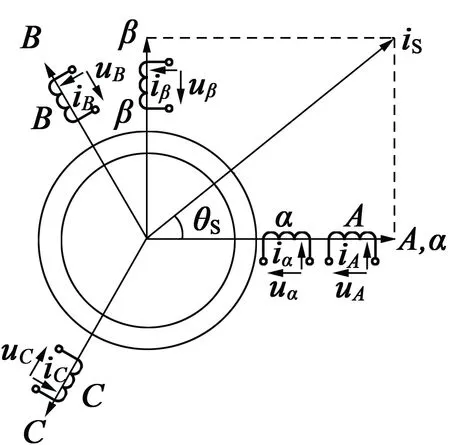
圖1 三相靜止軸系與二相靜止軸系
各繞組通入電流后,只計(jì)其基波磁動(dòng)勢(shì),正向電流產(chǎn)生的磁動(dòng)勢(shì)方向與繞組軸線一致[11]。磁動(dòng)勢(shì)等效是不同軸系之間變換的物理基礎(chǔ)和基本原則。因?yàn)橹挥羞@樣,才不會(huì)影響電機(jī)內(nèi)機(jī)電能量轉(zhuǎn)換。
若三相電流的基波合成磁動(dòng)勢(shì)與二相電流產(chǎn)生的基波合成磁動(dòng)勢(shì)相等,則有[12]:
(1)

設(shè)NA=kNα,則式(1)、式(2)可變換:
(3)

又由于本文使用的IPMSM三相繞組無(wú)中性線,即[12]:
i0=k′(iA+iB+iC)=0(5)
(6)
由式(5)可得:
iA+iB+iC=0(7)
代入式(6)得:
(8)
1.2 Park變換
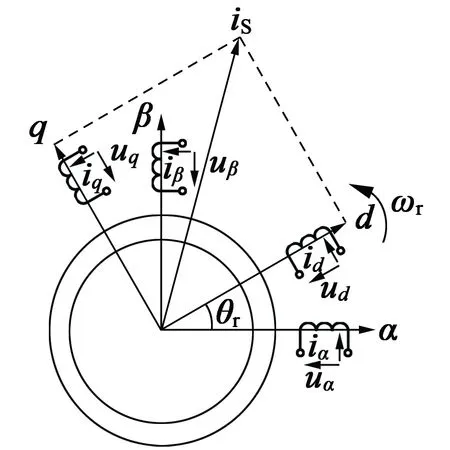
圖2 二相靜止軸系與二相旋轉(zhuǎn)軸系
Park變換是指兩相靜止坐標(biāo)系到二相旋轉(zhuǎn)坐標(biāo)系的變換,又稱2s/2r變換[14]。如圖2所示,設(shè)靜止坐標(biāo)系與旋轉(zhuǎn)坐標(biāo)系的相繞組匝數(shù)相同,以α軸為空間參數(shù)軸,d,q軸系以點(diǎn)角速ωr逆時(shí)針?lè)较蛐D(zhuǎn),空間相位角為θr(電角度),根據(jù)磁動(dòng)勢(shì)等效原則,則有[14]:
id=iαcosθr+iβsinθr(9)
iq=-iαsinθr+iβcosθr(10)
可得:
(11)
式(11)即為Park變換表達(dá)式,同時(shí)能夠滿足功率不變約束[15]。
1.3 矢量控制的原理
通過(guò)Clarke-Park坐標(biāo)變換,將定子三相電流(iA,iB,iC)變換到兩相d,q旋轉(zhuǎn)坐標(biāo)系下,轉(zhuǎn)換為與轉(zhuǎn)子磁鏈同向的d軸電流和與d軸電流相位相差90°的q軸電流分量,從而可以用直流電機(jī)轉(zhuǎn)矩控制方式來(lái)模擬三相交流電機(jī)的轉(zhuǎn)矩控制[16]。
1.4 BP神經(jīng)網(wǎng)絡(luò)
BP神經(jīng)網(wǎng)絡(luò)是一種信號(hào)前向傳遞、誤差反向傳遞的網(wǎng)絡(luò)。該網(wǎng)絡(luò)將信號(hào)從當(dāng)前層向下一層傳遞并直至輸出,如果輸出未達(dá)到設(shè)定誤差要求,則將輸出值與期望值的誤差反向傳播,并根據(jù)預(yù)測(cè)誤差來(lái)調(diào)整各個(gè)神經(jīng)元的權(quán)值和閾值,最終使神經(jīng)網(wǎng)絡(luò)的預(yù)測(cè)輸出和期望輸出滿足設(shè)定的誤差要求。誤差反向傳播優(yōu)化方法一般采用梯度下降法。本文仿真用BP神經(jīng)網(wǎng)絡(luò)作為對(duì)比實(shí)驗(yàn),其基本框架如圖3所示。
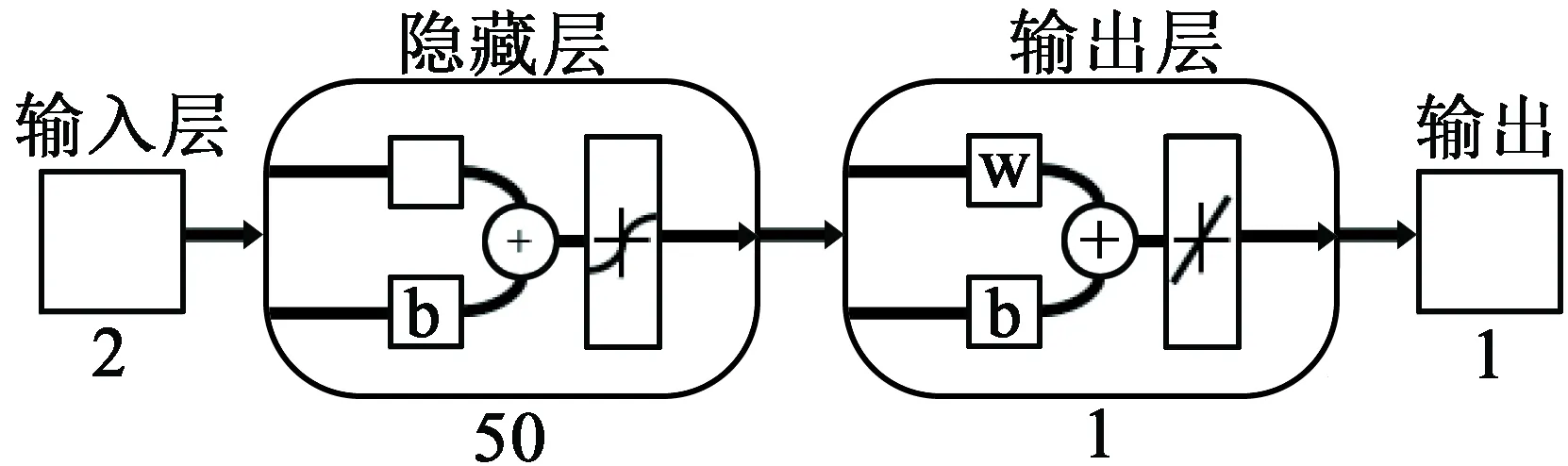
圖3 BP神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)
1.5 ELM
ELM神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)如圖4所示。
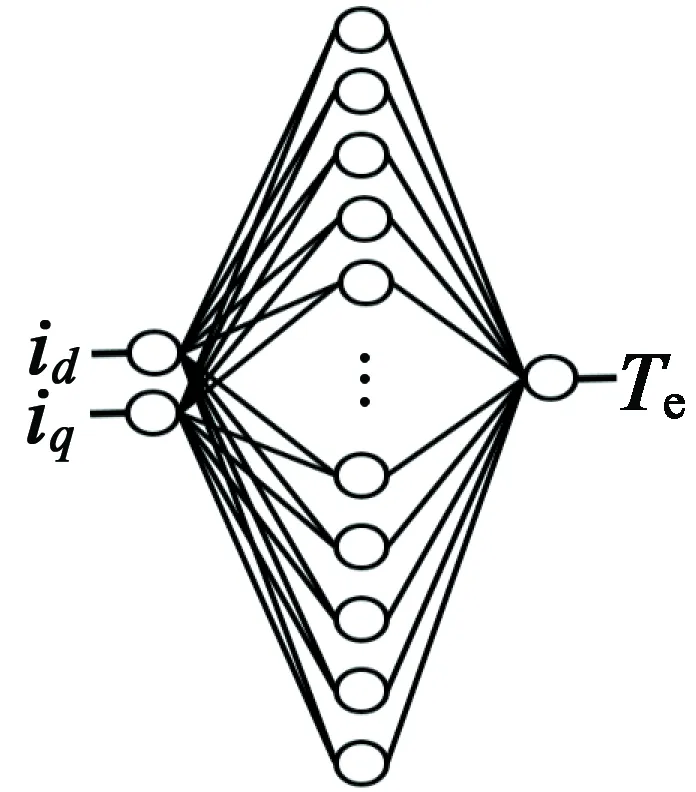
圖4 ELM神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)
ELM神經(jīng)網(wǎng)絡(luò)不需要提前設(shè)置各層神經(jīng)元之間的連接權(quán)值及閾值,僅僅需要人工設(shè)置隱藏層神經(jīng)元節(jié)點(diǎn)的個(gè)數(shù),并選取一個(gè)無(wú)限可微的函數(shù)作為全部隱藏層神經(jīng)元的激活函數(shù),便可得到全局最優(yōu)解。
2 基于ELM神經(jīng)網(wǎng)絡(luò)的轉(zhuǎn)矩觀測(cè)器
2.1 設(shè)計(jì)思路
本文通過(guò)Simulink仿真來(lái)模擬電機(jī)的運(yùn)轉(zhuǎn),并將ELM神經(jīng)網(wǎng)絡(luò)封裝為一個(gè)Simulink模塊參與到電機(jī)仿真控制中,最后進(jìn)行簡(jiǎn)單實(shí)驗(yàn)驗(yàn)證。
為了簡(jiǎn)化電機(jī)控制,通過(guò)坐標(biāo)變換將三相電機(jī)的三相電壓或者三相電流轉(zhuǎn)換到d,q坐標(biāo)系(即將a,b,c三相電壓或者電流變換成d,q軸電壓或電流)。在d,q坐標(biāo)系中,IPMSM的數(shù)學(xué)模型[17]:
(12)


式中:vd,vq為d軸和q軸電壓;id,iq為d軸和q軸電流;Ld,Lq為d軸電感和q軸電感;Ψm為永磁體磁鏈;R為定子繞組電阻;ωm為電機(jī)轉(zhuǎn)速;p為電機(jī)磁極對(duì)數(shù);Te為電機(jī)的輸出轉(zhuǎn)矩[17]。根據(jù)式(12)、式(13)可知,電機(jī)d,q軸的電壓由d,q軸的電流決定。又根據(jù)式(14)可知,電機(jī)的輸出轉(zhuǎn)矩也由d,q軸電流決定。因此,控制電機(jī)等同于控制電機(jī)的d,q軸電流。同時(shí)根據(jù)式(14)可知,id,iq可以有多種組合,產(chǎn)生同樣的Te。因此,存在一個(gè)id,iq組合的優(yōu)化值,使得電機(jī)效率最高。這可以通過(guò)MTPA查表來(lái)實(shí)現(xiàn)相關(guān)的優(yōu)化效果。
基于上述數(shù)學(xué)模型,轉(zhuǎn)矩觀測(cè)器的框圖如圖5所示。
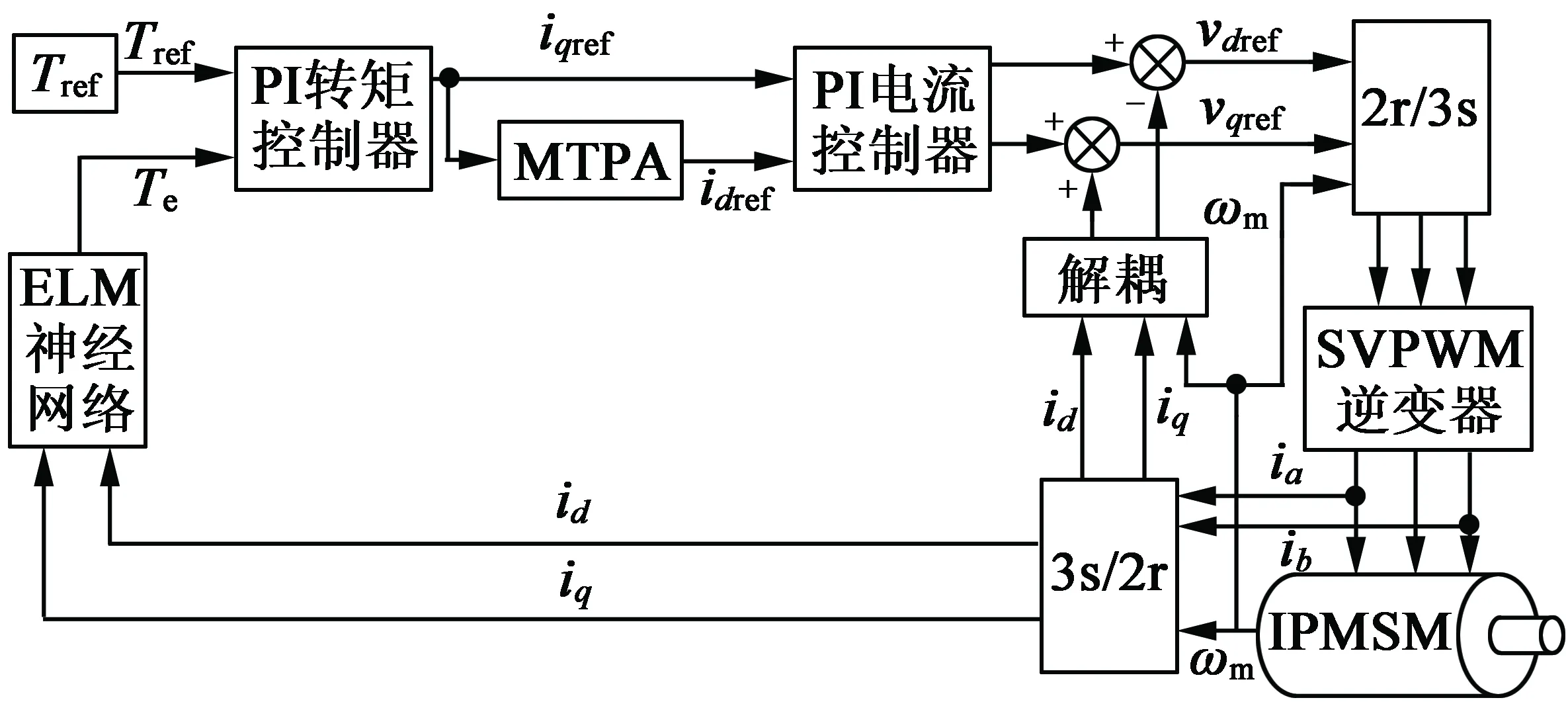
圖5 電機(jī)控制框圖
2.2 實(shí)現(xiàn)方法
圖5由ELM神經(jīng)網(wǎng)絡(luò)模塊,PI轉(zhuǎn)矩控制器模塊,PI電流控制器模塊,MTPA模塊,SVPWM逆變器,IPMSM和解耦裝置組成。其中,ELM神經(jīng)網(wǎng)絡(luò)模塊由MATLAB中訓(xùn)練好的ELM神經(jīng)網(wǎng)絡(luò)加一條gensim(net, -1)命令導(dǎo)出。
電機(jī)轉(zhuǎn)矩觀測(cè)器的實(shí)現(xiàn)方法:ELM神經(jīng)網(wǎng)絡(luò)模塊的輸入是測(cè)量獲得d,q軸電流id和iq。將來(lái)自ELM神經(jīng)網(wǎng)絡(luò)模塊擬合的Te與Tref(轉(zhuǎn)矩指令)一起輸入到PI轉(zhuǎn)矩控制器,PI轉(zhuǎn)矩控制器根據(jù)輸入的Tref指令和ELM神經(jīng)網(wǎng)絡(luò)模塊的輸出Te調(diào)整iqref,通過(guò)MTPA模塊查表,找到對(duì)應(yīng)的iqref和idref并輸出。 PI電流控制器接收iqref和idref,并在解耦裝置的作用下輸出vdref和vqref,之后將vdref和vqref轉(zhuǎn)換成三相電壓輸入SVPWM轉(zhuǎn)換器。PI電流控制器通過(guò)調(diào)整vdref和vqref,直到電機(jī)中的實(shí)際電流等于d,q軸電流命令(idref=id,iqref=iq);同時(shí),PI轉(zhuǎn)矩控制器調(diào)整iqref,直到電機(jī)的實(shí)際預(yù)測(cè)輸出Te等于當(dāng)前轉(zhuǎn)矩命令Tref(Te=Tref),此時(shí)電機(jī)的輸出轉(zhuǎn)矩等于轉(zhuǎn)矩命令Tref,最終控制電機(jī)運(yùn)行。
3 仿真結(jié)果與分析
在測(cè)試ELM神經(jīng)網(wǎng)絡(luò)轉(zhuǎn)矩觀測(cè)器效果時(shí),用BP神經(jīng)網(wǎng)絡(luò)轉(zhuǎn)矩觀測(cè)器作為對(duì)比實(shí)驗(yàn),在電機(jī)仿真物理參數(shù)完全相同的情況下比較兩者的效果。電機(jī)模型仿真參數(shù)設(shè)置如表1所示。
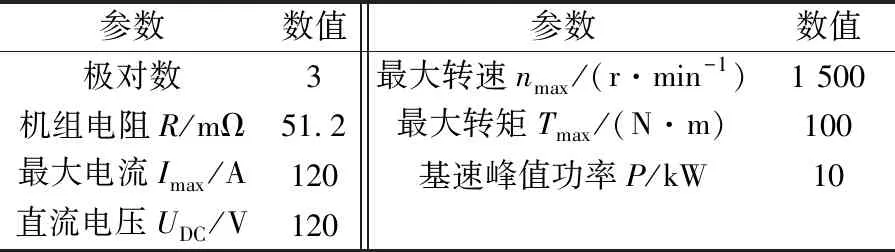
表1 仿真參數(shù)
電機(jī)仿真模型的轉(zhuǎn)速?gòu)?0r/min到1500r/min遞增,空間相位角β值為0~π/2,訓(xùn)練時(shí)電流增幅為1 A,測(cè)試時(shí)電流增幅為0.5 A,即用多種轉(zhuǎn)速和更精確的電流值來(lái)驗(yàn)證ELM和BP神經(jīng)網(wǎng)絡(luò)的擬合性能。從傳統(tǒng)PI仿真模型生成的數(shù)據(jù)中隨機(jī)抽取170條數(shù)據(jù)作為測(cè)試集,兩模型測(cè)試效果如圖6所示。
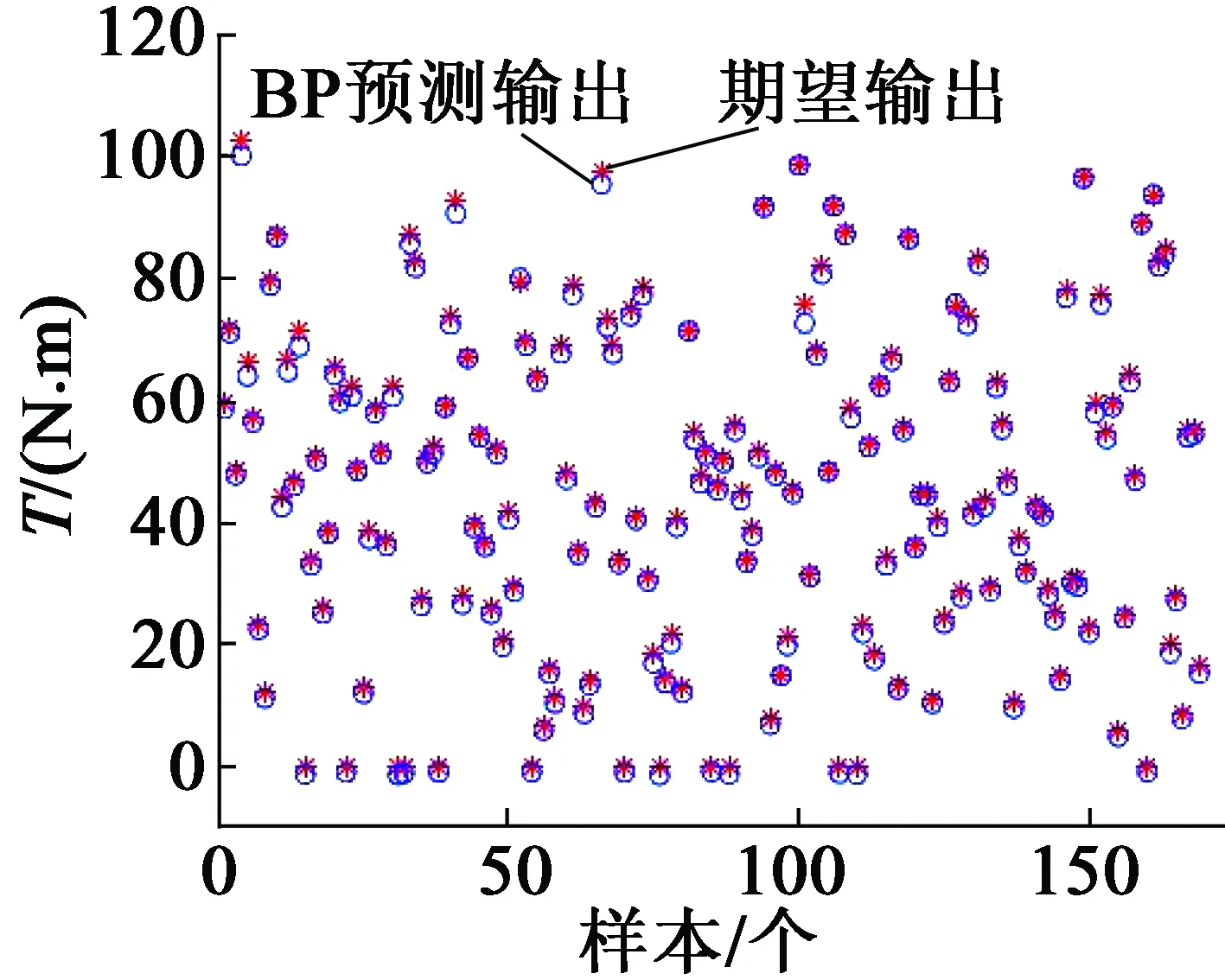
(a) BP神經(jīng)網(wǎng)絡(luò)
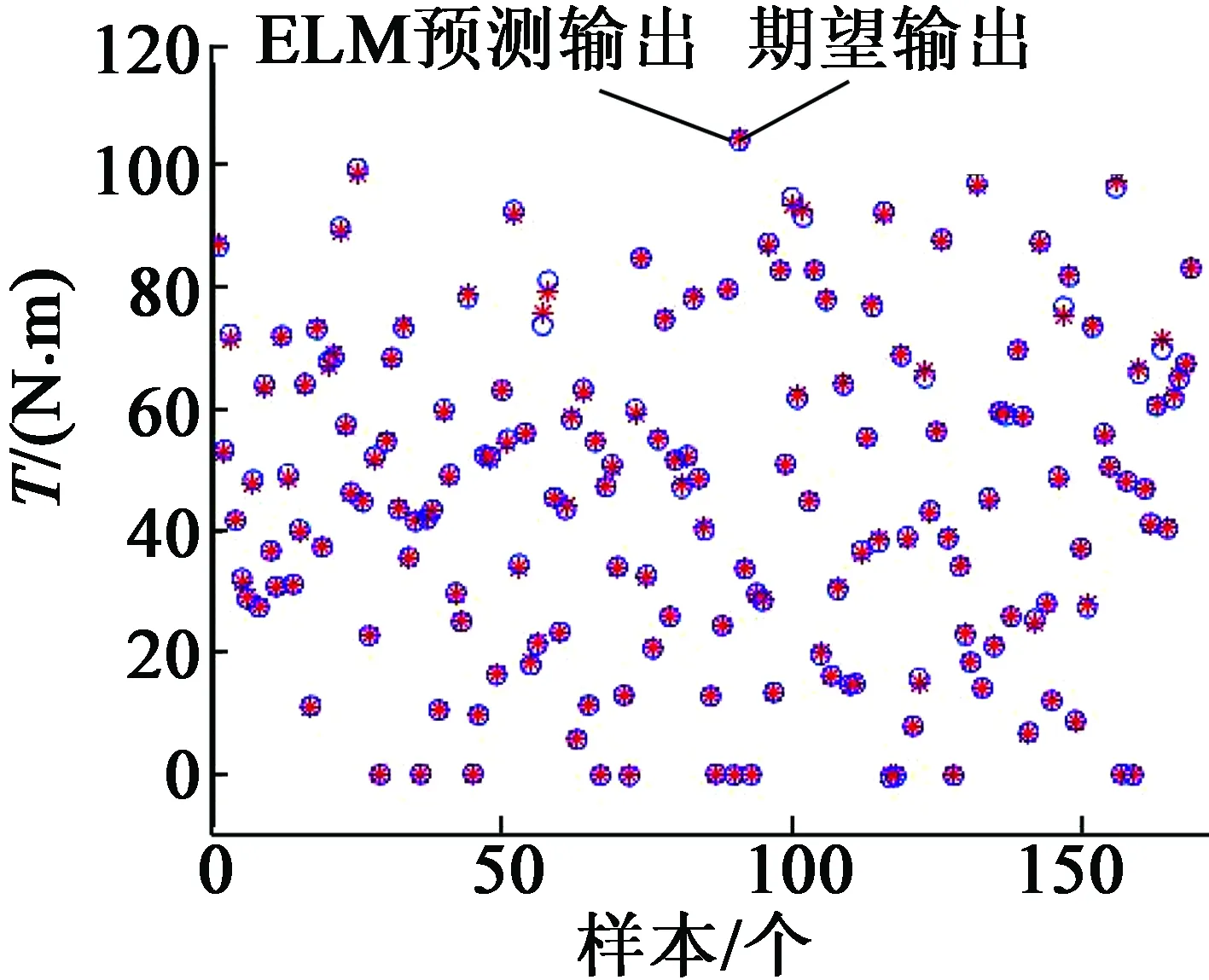
(b) ELM神經(jīng)網(wǎng)絡(luò)
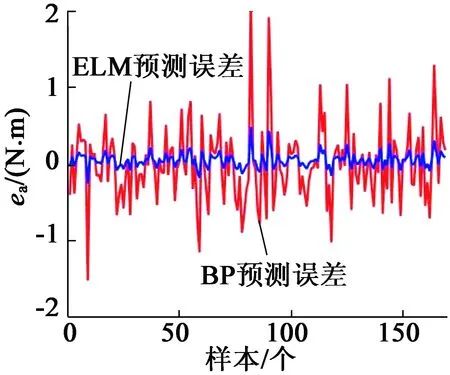
(c) 誤差比較
經(jīng)計(jì)算,BP和ELM模型的精確率分別為95.35%和97.4%。其中,BP神經(jīng)網(wǎng)絡(luò)參數(shù):學(xué)習(xí)率為0.001,激活函數(shù)為sigmoid,損失函數(shù)為MSE、神經(jīng)元節(jié)點(diǎn)個(gè)數(shù)150個(gè),訓(xùn)練步數(shù)200步;ELM神經(jīng)網(wǎng)絡(luò)參數(shù):激活函數(shù)為sigmoid,神經(jīng)元節(jié)點(diǎn)數(shù)150個(gè)。
對(duì)比發(fā)現(xiàn),ELM神經(jīng)網(wǎng)絡(luò)在同等參數(shù)設(shè)置條件下效果明顯優(yōu)于BP神經(jīng)網(wǎng)絡(luò)。雖然ELM測(cè)試結(jié)果精確率略高于BP,但其訓(xùn)練時(shí)間遠(yuǎn)低于BP,故本文采用ELM神經(jīng)網(wǎng)絡(luò)去實(shí)現(xiàn)轉(zhuǎn)矩觀測(cè)。
如表2所示,通過(guò)試湊法來(lái)調(diào)整ELM網(wǎng)絡(luò)隱藏層節(jié)點(diǎn)發(fā)現(xiàn),隱藏層節(jié)點(diǎn)數(shù)并非越多越好。從測(cè)試的精確率可看出,當(dāng)隱藏層神經(jīng)元個(gè)數(shù)逐漸增加時(shí),預(yù)測(cè)精確率呈先增后減的趨勢(shì),當(dāng)節(jié)點(diǎn)為169時(shí),精確率最高,遠(yuǎn)高于BP的91.35%,故本文采用了169個(gè)隱藏層節(jié)點(diǎn)的ELM神經(jīng)網(wǎng)絡(luò)。
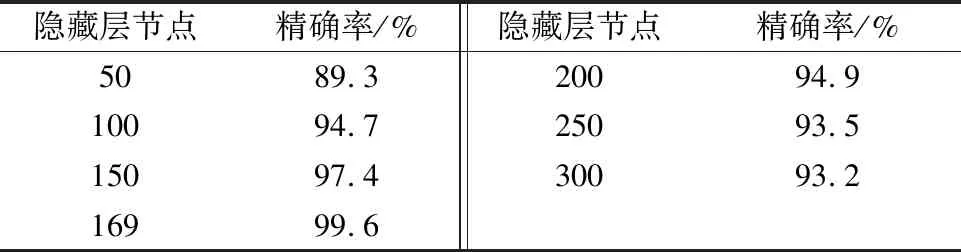
表2 ELM神經(jīng)網(wǎng)絡(luò)預(yù)測(cè)精確率
ELM神經(jīng)網(wǎng)絡(luò)觀測(cè)器的仿真表現(xiàn)如圖7所示。其中,圖7(a)是在電機(jī)轉(zhuǎn)矩突變的情況下,電機(jī)實(shí)際轉(zhuǎn)矩和ELM神經(jīng)網(wǎng)絡(luò)擬合的轉(zhuǎn)矩輸出對(duì)比圖,由此可看出,該觀測(cè)器具有較好動(dòng)態(tài)性能。圖7(b)是電機(jī)以恒定的轉(zhuǎn)矩值和轉(zhuǎn)速值起動(dòng)并平穩(wěn)運(yùn)行時(shí),電機(jī)的靜態(tài)轉(zhuǎn)矩輸出和ELM神經(jīng)網(wǎng)絡(luò)轉(zhuǎn)矩觀測(cè)器的輸出幾乎完全吻合,在起動(dòng)0.02 s左右達(dá)到穩(wěn)定值,并且平穩(wěn)保持,這說(shuō)明該觀測(cè)器具有較好的靜態(tài)表現(xiàn)。圖7(c)是在轉(zhuǎn)矩命令從零開(kāi)始隨時(shí)間穩(wěn)定增長(zhǎng),到60 s時(shí)電機(jī)實(shí)際轉(zhuǎn)矩和ELM神經(jīng)網(wǎng)絡(luò)轉(zhuǎn)矩觀測(cè)器輸出值的曲線圖。從圖7(c)可以看出,觀測(cè)器輸出值可以較好地跟隨電機(jī)實(shí)際轉(zhuǎn)矩的變化,具有較好的全局穩(wěn)定性。

(a) 觀測(cè)器動(dòng)態(tài)轉(zhuǎn)矩輸出結(jié)果
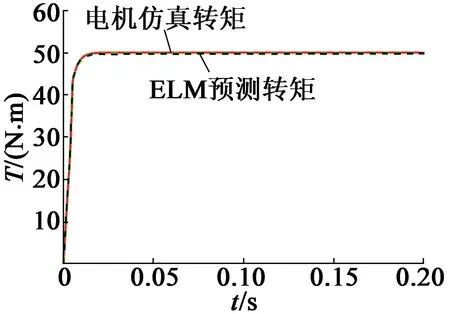
(b) 觀測(cè)器定值轉(zhuǎn)矩輸出
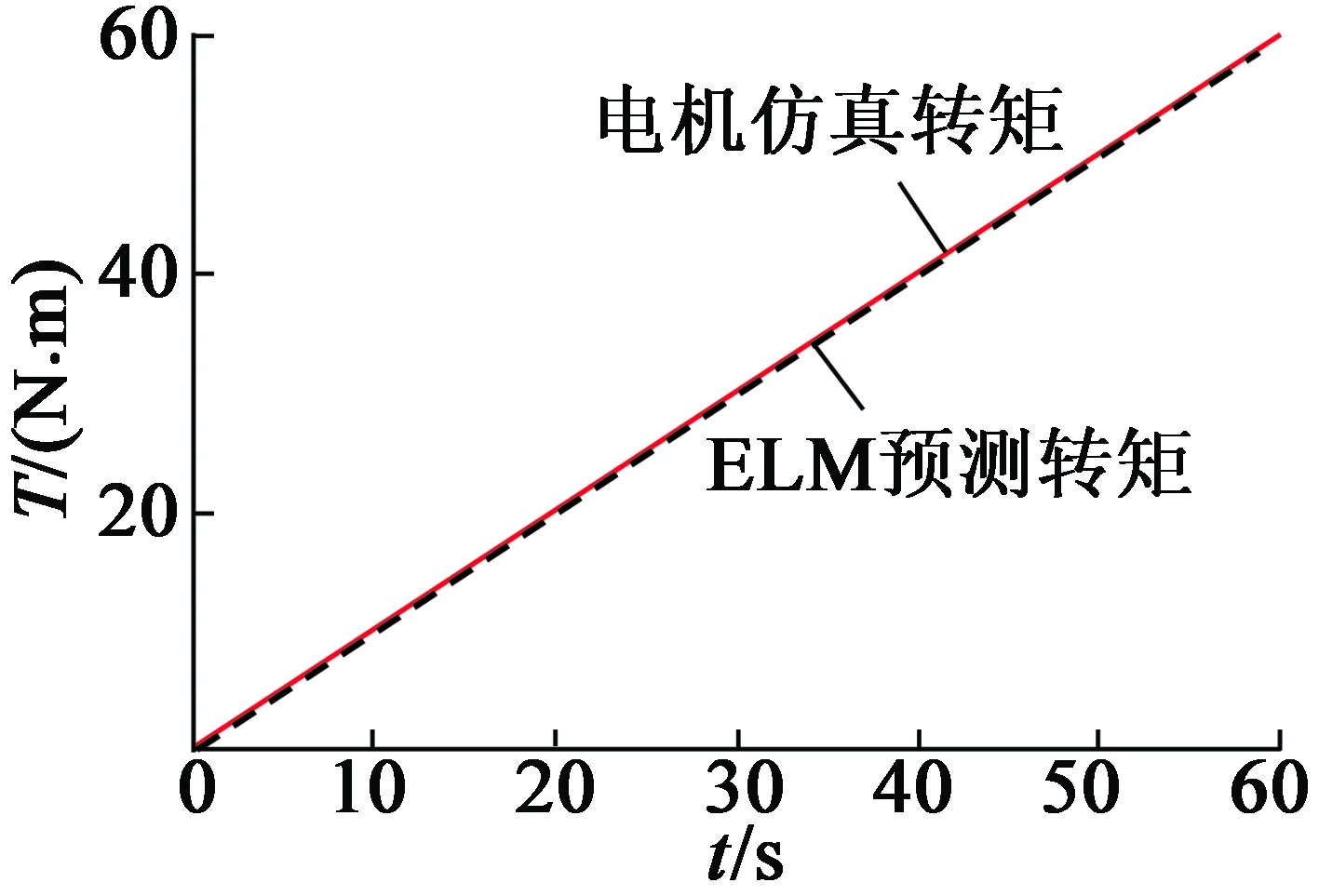
(c) 觀測(cè)器漸變轉(zhuǎn)矩輸出
4 實(shí)驗(yàn)結(jié)果與分析
如圖8所示,實(shí)驗(yàn)平臺(tái)由電源、轉(zhuǎn)矩轉(zhuǎn)速觀測(cè)器、驅(qū)動(dòng)控制板、控制箱、DSpace、伺服控制器、電機(jī)平臺(tái)和一臺(tái)電腦組成。其中電機(jī)平臺(tái)由ZH07扭矩傳感器、130ST-M10015LFB永磁同步電機(jī)和一個(gè)底座組成。
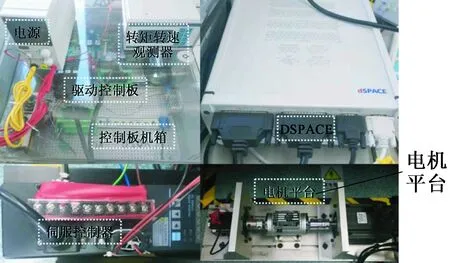
圖8 實(shí)驗(yàn)平臺(tái)實(shí)物圖
130ST-M10015LFB永磁同步電機(jī)參數(shù)如表3所示。
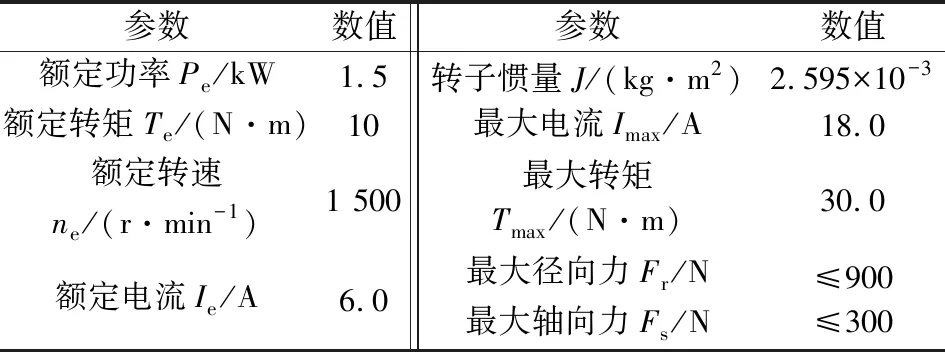
表3 永磁同步電機(jī)參數(shù)
為了驗(yàn)證ELM轉(zhuǎn)矩觀測(cè)器的實(shí)驗(yàn)性能,在實(shí)驗(yàn)時(shí)設(shè)定兩組實(shí)驗(yàn):帶預(yù)先訓(xùn)練好的ELM神經(jīng)網(wǎng)絡(luò)模塊的模型(圖5)和只用PI模塊的模型。電機(jī)起動(dòng)初始時(shí)刻負(fù)載轉(zhuǎn)矩Tref=0,在t=2 s時(shí)加上10 N·m負(fù)載轉(zhuǎn)矩,將此過(guò)程中產(chǎn)生的數(shù)據(jù)保存下來(lái),并通過(guò)MATLAB畫出1.9~2.1 s的物理曲線圖,該實(shí)驗(yàn)結(jié)果對(duì)比圖如圖9所示。
從圖9(a)和圖9(c)中可以看出,在電機(jī)起動(dòng)的擾動(dòng)允許范圍內(nèi),ELM模型有效地降低了轉(zhuǎn)矩脈動(dòng),經(jīng)計(jì)算,轉(zhuǎn)矩脈動(dòng)大約降低90%,具有較好的轉(zhuǎn)矩波動(dòng)擬合能力。并且從圖9(b)和圖9(d)中可以看出,ELM模型較傳統(tǒng)的PI模型有更精準(zhǔn)的動(dòng)態(tài)擬合能力和較好的抗擾動(dòng)能力。
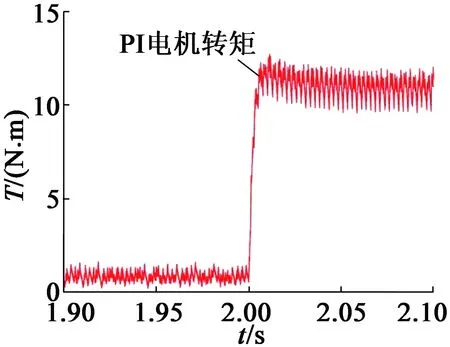
(a) PI模型的電機(jī)轉(zhuǎn)矩
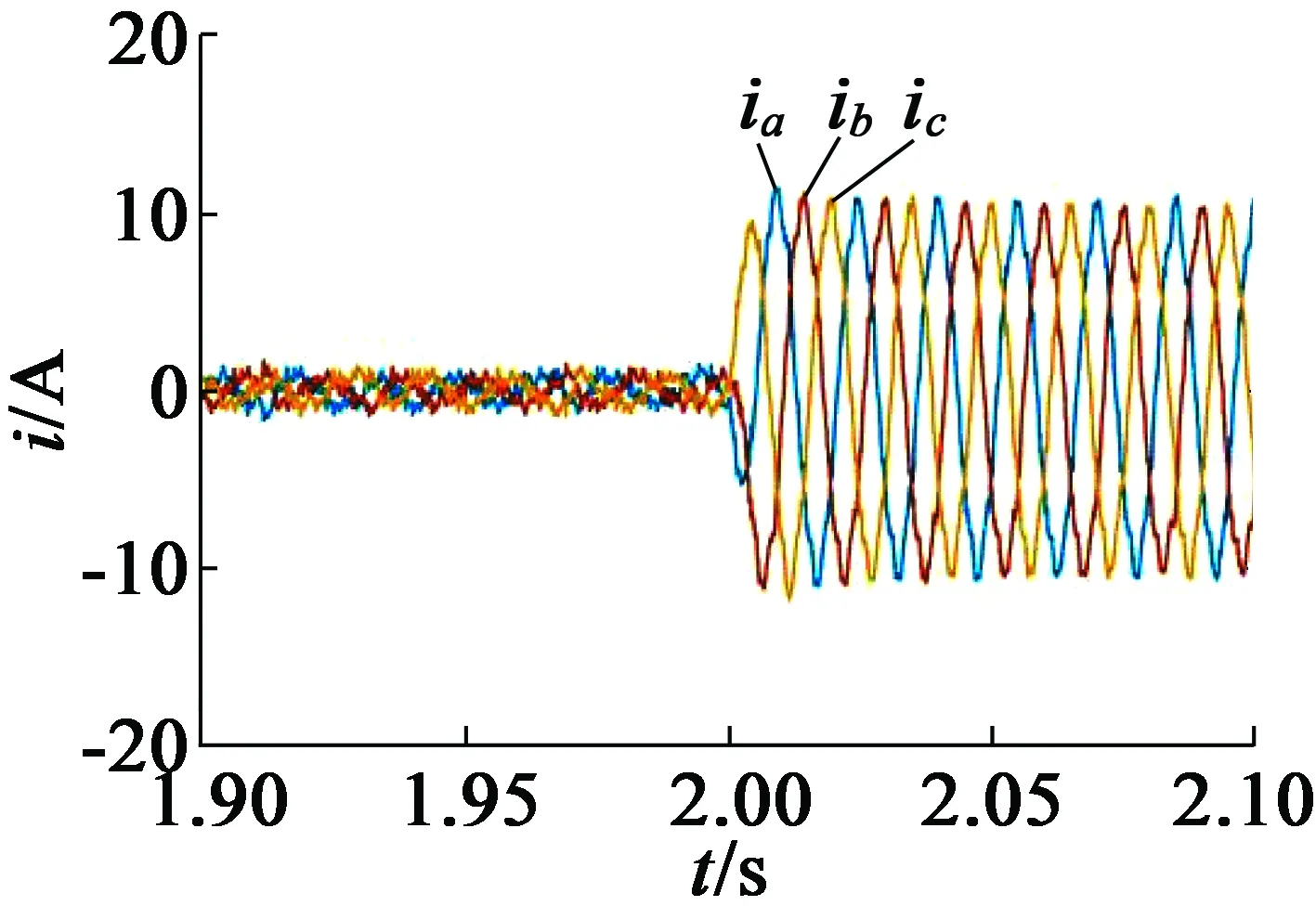
(b) PI模型的三相電流
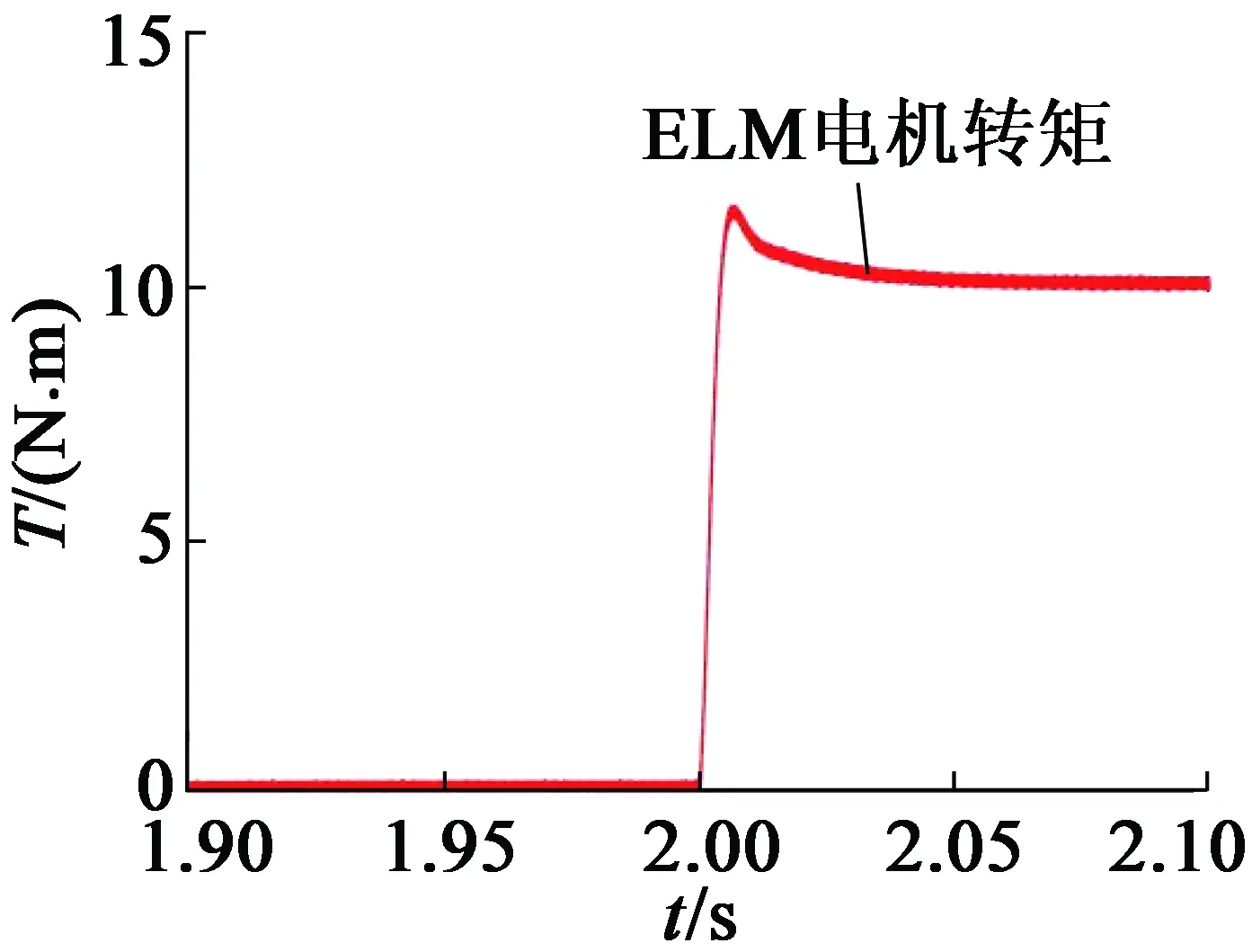
(c) ELM模型的電機(jī)轉(zhuǎn)矩
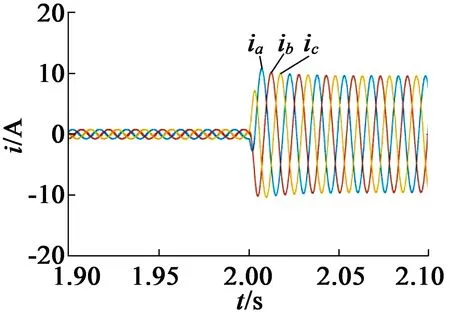
(d) ELM模型的三相電流
5 結(jié) 語(yǔ)
使用高精度、快響應(yīng)的轉(zhuǎn)矩觀測(cè)器來(lái)精確觀測(cè)IPMSM的轉(zhuǎn)矩對(duì)于電機(jī)控制非常重要。由于電機(jī)參數(shù)是時(shí)變的,傳統(tǒng)的基于數(shù)學(xué)模型的方法計(jì)算誤差較大,影響系統(tǒng)性能。在本文中,電機(jī)轉(zhuǎn)矩直接由ELM神經(jīng)網(wǎng)絡(luò)預(yù)測(cè),通過(guò)訓(xùn)練神經(jīng)網(wǎng)絡(luò),它可以精確預(yù)測(cè)電機(jī)的轉(zhuǎn)矩。ELM神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)簡(jiǎn)單、精度高,而且較傳統(tǒng)BP神經(jīng)網(wǎng)絡(luò)速度能更快、更好地實(shí)現(xiàn)電機(jī)轉(zhuǎn)矩的動(dòng)態(tài)觀測(cè)。仿真和實(shí)驗(yàn)結(jié)果表明,該系統(tǒng)具有良好的轉(zhuǎn)矩觀測(cè)能力和轉(zhuǎn)矩波動(dòng)抑制能力。
猜你喜歡
童話王國(guó)·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網(wǎng)絡(luò)安全與數(shù)據(jù)管理(2022年1期)2022-08-29 03:15:20
導(dǎo)航定位學(xué)報(bào)(2022年4期)2022-08-15 08:27:00
中學(xué)生數(shù)理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀(jì)智能(數(shù)學(xué)備考)(2021年9期)2021-11-24 01:14:36
成都醫(yī)學(xué)院學(xué)報(bào)(2021年2期)2021-07-19 08:35:14
新世紀(jì)智能(數(shù)學(xué)備考)(2020年9期)2021-01-04 00:25:14
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(bào)(2020年2期)2020-06-02 11:29:24
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19