基質塊苗蔬菜移栽機試驗研究
2019-05-27 08:47:36崔志超陳永生管春松楊雅婷高慶生趙國棟
農機化研究 2019年10期
關鍵詞:作業
崔志超,陳永生,2,管春松,楊雅婷,高慶生,趙國棟
(1.農業部南京農業機械化研究所,南京 210014;2.江蘇現代園藝工程技術中心,江蘇 鎮江 212000)
0 引言
蔬菜種植主要以直播和移栽兩種方式為主,由于育苗移栽利于秧苗成活及后期管理和收獲,使得我國目前約有60%以上的蔬菜品種采用育苗移栽的方式種植[1]。長期以來,蔬菜移栽作業主要以人工為主,但是在當前我國農業已進入高投入、高成本的大背景下,用工難、用工貴的問題在蔬菜生產中日發凸顯。近10年來,我國蔬菜生產成本年均漲幅在10%以上,特別是人工費用上漲最快,年均漲幅達18%[2]。隨著我國城鎮化進程的加快和農村富余勞動力向非農產業的轉移,勞動力成本不斷增大將成為蔬菜生產發展的主要制約因素,也將成為實行機械化的直接推動力。另外,由于蔬菜生長周期短、受氣候影響較大且種植工序繁多,因此急需一種作業效果好且效率高的移栽機來替代人工生產。
國內于20世紀60年代開始對移栽機的研究,最初應用于棉花或甘薯種植;80年代研制出現半自動蔬菜移栽機[3],由于育苗工藝更新速度慢、移栽機配套不足等原因而沒能普遍推廣。近幾年,通過技術引進、自主研發逐漸出現了少量蔬菜半自動移栽機械,如現代農裝科技股份有限公司的2ZY系列[4]、華龍農備有限公司的2ZBZ系列等。現有半自動移栽機的業裝栽植頻率受限于工人喂苗速度,通常在40株/min·行-1左右,作業效率低,且用工數在4~5人左右,省力不省工。全自動移栽方面,江蘇大學[5]和浙江理工大學[6]在這方面發表論文較多,并研制了樣機,但與之配套的育苗技術要求較高,取苗系統復雜,尚處試驗階段,市場上未見到成熟產品推廣。因此,國內蔬菜移栽技術與裝備還處于起步階段。國外蔬菜移栽機械較發達地區以歐美和日本為代表,從推廣使用程度來講,歐美國家主要還是以半自動移栽機為主,比例約占95%,全自動移栽機受多方面因素影響推廣使用比例僅占5%;而日本恰好相反,由于勞動力短缺、丘陵山地較多、田塊較小,推廣機型以小巧靈活的全自動移栽機為主,如久保田SKP-100MPC型、井關PVHR2-E18型、洋馬PF2R型等[7-10]。相對半自動移栽機,具有作業效率較高、省工省力等優點,但是專用性較強,對缽苗培育和苗盤制作要求較高,所以在國內推廣效果甚微。近幾年,隨著育苗工藝的不斷革新,歐洲國家研究出基質塊育苗移栽機。采用基質塊育苗可以防止根部損傷,提高保水保肥能力,因此發展較快,配套較完善。
針對上述問題,引進了一種基質塊苗蔬菜移栽機,該機器采用機液氣多動力源組合控制,集畦面整平、開溝、移栽、覆土等功能于一體,可實現蔬菜快速高效移栽作業。本文為蔬菜移栽機械研究提供一種參考機型,以期在國內得到推廣應用。
1 整體結構及工作過程
1.1 整體結構組成
基質塊苗蔬菜移栽機主要由動力源、地輪、驅動滾筒、開溝覆土裝置、輸送分苗裝置、栽植裝置及機架等部分組成,如圖1所示。其中,動力源包括液壓泵和空氣壓縮機,均由拖拉機動力輸出軸提供動力;地輪分別安裝到機架的四角,可調節機具整體離地間隙;驅動滾筒由液壓馬達驅動,通過鏈條帶動栽植裝置和輸送分苗裝置動作;開溝覆土裝置位于栽植裝置正下方;輸送分苗裝置設置在機架后方;栽植裝置設置在輸送分苗裝置前方,開溝器正上方;所有部件均固定在機架上,機架上方設置苗盤支架。該機能一次作業完成畦面整平、開溝、移栽、覆土等工序。技術參數如表1所示。

1.動力源 2.前地輪 3.驅動滾筒 4.開溝覆土裝置 5.后地輪 6.輸送分苗裝置 7.栽植裝置
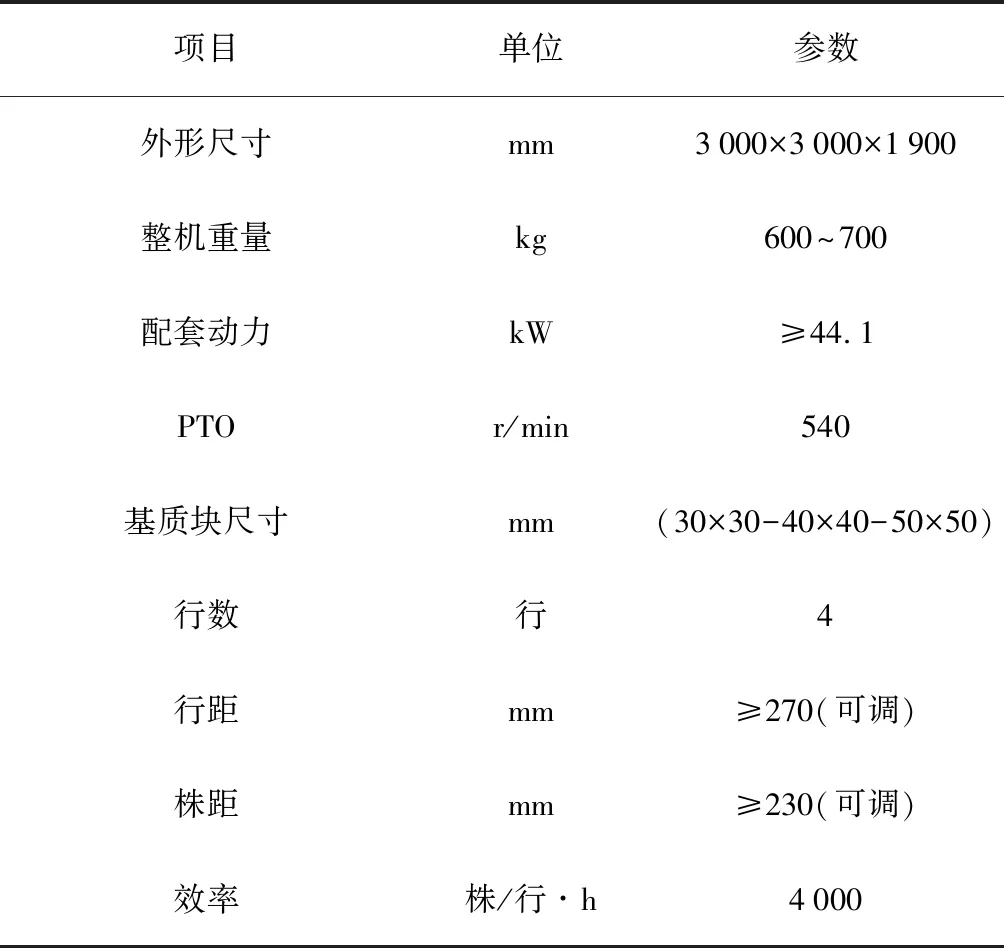
項目單位參數外形尺寸mm3000×3000×1900整機重量kg600~700配套動力kW≥44.1PTOr/min540基質塊尺寸mm(30×30-40×40-50×50)行數行4行距mm≥270(可調)株距mm≥230(可調)效率株/行?h4000
1.2 工作過程
工作時,機器由拖拉機牽引作業,拖拉機動力輸出軸與移栽機動力源連接,為整機各部件協同工作提供動力。首先,平底滾筒將栽植區域內的土壤壓平,開溝器在壓平后的土壤上開出矩形栽植溝;然后,人工將方體基質塊苗從苗盤內成排取出放在后輸送帶上;成排基質塊苗被連續向前輸送,經間歇分苗機構區分后,始終保持前輸送帶頂端只保留1株基質塊苗;栽植裝置上的栽植器跨過前輸送帶并夾持頂端的基質塊將其帶走,當栽植器運動到近地端時被打開器被強制打開,方體基質塊苗靠自身重力落入開溝器開出的栽植溝內;最后,覆土器對基質塊進行覆土掩埋,完成基質塊苗的栽植。
2 試驗與分析
2.1 試驗條件和方法
試驗時間:2017年5月17-20日。
試驗地點:北京中農富通農場試驗田。
試驗裝置:多功能蔬菜快速移栽機樣機配套雷沃歐豹M954-D型拖拉機,如圖2所示。

圖2 田間試驗
試驗對象:生長周期為25d、40×40×40mm的立方體基質塊玉米苗,如圖3所示。
土壤條件:沙壤土,試驗前采用復式精整地機對其旋耕、細碎、起壟,壟面平整無大土塊、石塊、秸稈及雜草等障礙物,土壤含水率≤20%,符合秧苗栽植要求。
試驗方法:將基質塊苗蔬菜移栽機掛接到雷沃歐豹M954-D型拖拉機上,整機共4組工作單元,1人負責兩組。每次每行連續測定120株,栽植頻率、栽植質量和栽植精度同時測定,重復試驗3次,取其平均值。
檢驗依據:根據旱地栽植機械行業標準JB /T 10291-2013[11]內相關標準進行檢驗。

圖3 方體基質塊苗
2.2 試驗結果與分析
2.2.1 試驗結果2.2.1.1 栽植頻率
定義單位時間內移栽機任一栽植行栽植秧苗的全部株數為栽植頻率,計算公式如(1)所示。由于4組同步驅動,因此以其中1行為試驗對象記錄時間,如表2所示。
(1)
式中F—栽植頻率(株/min行-1);
z—栽植株數(株);
t—栽植時間(min)。

表2 栽植頻率試驗結果
2.2.1.2 栽植質量
在測量栽植頻率的同時,對漏栽率、倒伏率、及試驗長度進行測定。其中,漏栽株數根據設計株距Xr=230mm來確定。當相鄰兩株距Xi在0.5Xr≤Xi≤1.5Xr范圍內時,合格株距;當相鄰兩株距Xi在1.5Xr≤Xi≤2.5Xr范圍內時,漏栽1株;當相鄰兩株距Xi在2.5Xr≤Xi≤3.5Xr范圍內時,漏栽2株……以此類推。
以秧苗主莖與地面夾角α為評價指標,定義α≤30°為倒伏,α>30°為合格[12],以此來判斷秧苗栽后倒伏率。
測量120株秧苗(包括漏栽數)每株栽植狀態,不得重復計算,測定結果如表3所示。

表3 栽植質量試驗結果
2.2.1.3 栽植精度
(2)

(3)

(4)

(5)

Sx—株距標準差(mm);
CVx—株距變異系數(%);
n—實測株距數(株);
H—栽植深度合格率(%);
Xi—實測株距(mm);
Nh—栽植深度合格總株數(株);
N—實測深度總株數(株)。

表4 栽植精度試驗結果
2.2.2 結果分析
由表1可以看出:同一栽植行3次試驗栽植頻率各異,但差異顯著性不是太大,平均栽植頻率(F=57株/min·行-1),小于技術參數中(F=66株/min·行-1)。其原因可能是人工操作不熟練導致喂苗速度受影響,或拖拉機低速擋未達到合適的行進速度。但該機器為輸送帶和吊杯組合式移栽機,以旱地栽植機械行業標準JB /T 10291-2013規定的最大栽植頻率(F≥55株/min·行-1)為評判標準,則該機器能夠滿足要求。
由表2可以看出:4組栽植行同步作業測得漏栽率為6.67%,倒伏率為4.24%,栽植合格率為95.3%。與旱地栽植機械行業標準JB /T 10291-2013相比較,漏栽率高出1.67%,其原因可能是氣動元件出現氣路不暢造成分苗系統動作不連續及分苗不均,但倒伏率和栽植合格率均大于標準內提到的性能指標。
由表3可以看出:平均栽植株距235mm,標準差圍繞設計株距230mm上下浮動范圍不大,變異系數小于標準規定的≤20%,說明栽植株距比較穩定;平均栽植深度為62.9mm,能夠將40×40×40mm的基質塊埋實,標準差和變異系數變化不大,最終測量栽植深度平均合格率為98.75%,存在個別基質塊掩埋不實的現象。這原因可能與地勢和土壤整理程度有關,但其結果也遠高于標準規定的≥75%。
3 結論與建議
1)引進了一種基質塊苗蔬菜移栽機,實現了一次作業可完成畦面整平、開溝、移栽、覆土等功能。采用液壓、氣壓與機械相互配合的多動力源組合傳動方式,從而為蔬菜移栽機設計提供參考。
2)通過田間試驗驗證了機器的可靠性和作業效果。以旱地栽植機械行業標準JB /T 10291-2013為作業質量判斷標準,其栽植頻率F=57株/min·行-1,雖小于設計技術參數,但滿足且高于移栽機標準規定的數值;秧苗栽植后倒伏率為4.23%,栽植合格率為95.3%,栽植株距及栽植深度合格率均滿足標準要求。
3)試驗結果顯示機器漏栽率高出標準規定數值1.68個百分點,分析原因是:農田作業環境惡劣,空氣雜質多,易造成氣動系統堵塞,自動分苗系統工作不暢造成,建議下一步對氣動系統進行優化和改進。另外,本文僅對機器的性能進行了簡單的驗證試驗,還需對關鍵部件進行大量單因素試驗和正交試驗,研究不同因素的相互作用對本機器性能的影響,找出最優組合參數,以便對機器進行國產化改進設計,適應我國蔬菜種植的農藝要求。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08
