面向車輛縱向動力學控制的制動意圖識別綜述
2019-06-11 08:27:47塵帥王吉忠張西龍呂林鄭龍月
河北科技大學學報 2019年2期
塵帥 王吉忠 張西龍 呂林 鄭龍月
摘要:制動意圖識別作為新型線控制動系統控制的先決條件,其識別結果的優劣直接影響車輛控制系統的精度,進而影響特定工況下的車輛行車安全性,因此為了提高車輛的主動安全性,提升車輛的制動性能,針對車輛動力學中的縱向穩定性控制問題,以制動意圖為切入點,介紹了目前制動意圖的分類,概述了基于制動意圖識別的車輛動力學控制的國內外研究現狀;結合制動意圖識別特征的選取問題,重點對比分析了幾種典型的制動意圖識別方法,包括模糊推理系統、神經網絡、自適應神經模糊推理系統、隱馬爾可夫模型和聚類分析;結合當下研究現狀指出了合理選取特征參數、轉換輸出目標、多標準評價體系是面向車輛動力學控制的制動意圖識別的研究重點和方向。
關鍵詞:車輛工程;制動意圖;意圖識別;車輛動力學;穩定性控制
中圖分類號:U4635文獻標志碼:A
Abstract: As a prerequisite for the control of the brake by wire system, the identification of braking intention has a direct impact on the accuracy of the vehicle control system, and it affects the vehicle running safety under specific working conditions, thus, in order to improve the active safety and braking performance of the vehicle, aiming at the longitudinal stability control problem in vehicle dynamics, the braking intention is taken as the breakthrough point, and the classification of braking intentions is introduced. At the same time, the vehicle dynamics control of braking intention recognition based on the research status at home and abroad is outlined. Besides, combining with the braking intention recognition feature selection problem, several typical braking intention recognition methods, including fuzzy inference system, neural network, adaptive neural fuzzy inference system, hidden Markov model and cluster analysis, are comparatively analyzed. Considering the status quo of research, the research emphasis and direction of braking intention recognition for vehicle dynamics control is pointed out, including reasonably selecting characteristic parameters, transition of export target and multistandard evaluation system.
Keywords:vehicle engineering;braking intention;intention recognition;vehicle dynamics; stability control
隨著車輛控制技術的不斷提升,汽車的電子化、智能化和網絡化成為當下汽車發展的重要標志,而安全、節能、環保、舒適是用戶對車輛永恒的要求[1]。線控技術及智能網聯技術的出現使得人們更加注重車輛行駛安全性,相應地對車輛的制動系統也提出了更精準可靠的要求。線控制動系統(brake by wire, BBW)作為一種新型電子制動系統,在其車輛結構上取消了部分機械與液壓連接裝置,將傳統的制動系統發展為主要以電信號為觸發信號、中央控制器協調制動執行器對車輪進行精確制動的電子制動系統。當下針對線控制動系統動力學控制的研究主要集中在路面附著系數識別[2-5]、防抱死制動控制方法[6-7]、制動力分配策略[8]及駕駛員制動意圖識別[9-32]等方面,鑒于BBW將會成為取代傳統液壓制動系統的發展趨勢之一,為了更精確可靠地進行車輛制動控制、提高汽車主動安全性,對駕駛員制動意圖識別方法展開深入細致且合理的研究是非常重要的。制動意圖識別研究主要包括:分類制動意圖、選擇意圖識別方法、選取識別特征、確定評價標準等。
1制動意圖研究現狀
目前車輛縱向動力學控制研究的重點主要集中在車輛性能參數匹配上,較少考慮駕駛員制動意圖的影響,而人-車-路作為一個完整的閉環系統,在進行車輛縱向動力學控制時應當考慮人和路面的影響,進而提升車輛制動系統控制的精度,達到最優的控制效果。面向車輛動力學控制的制動意圖研究對于提高車輛的主動安全性及促進智能車輛技術發展具有重要意義,是國內外科研人員研究的熱點[9]。
1.1國外制動意圖識別研究現狀
由于國外科研人員針對制動意圖識別已開展了較長時間的研究工作,其研究內容不僅包括意圖識別方法研究,還更多地涉及到多學科交叉融合研究,因此對高級駕駛員輔助系統(advanced driver assistance system,ADAS)及無人駕駛技術的發展具有重要促進作用。有些研究人員致力于制動意圖識別方法研究,文獻[10]提出了一種將駕駛員腦電圖(electroencephalography,EEG)信號與周圍信息融合控制的腦控車輛緊急制動意圖檢測方法,即首先建立一種基于腦電圖的駕駛員緊急制動意圖檢測模型,然后將所提出的基于EEG的意圖檢測模型的結果與基于周圍信息的障礙檢測模型的結果融合,對突發事件進行識別。實驗結果表明,該方法能夠有效地檢測突發事件,系統準確率為94.89%。文獻[11]使用EEG信號來偵測緊急制動意圖,采用支持向量機(support vector machines,SVM)和卷積神經網絡對腦電圖信號進行分類,用以識別制動意圖和正常駕駛意圖,結果表明SVM對緊急制動意圖的識別顯著。文獻[12]提出了一種基于雙層隱馬爾可夫模型(hidden markov modle, HMM)的駕駛意圖識別和駕駛行為預測模型,其上層多維離散隱馬爾可夫模型表示聯合工況下的驅動意圖,它是根據下層多維高斯隱馬爾可夫模型中某些單一工況下的驅動行為構建的,通過操縱駕駛員信號和車輛狀態信息識別駕駛行為,將識別結果發送到上層HMM以識別駕駛意圖,研究結果表明雙層隱馬爾可夫模型能夠準確有效地識別駕駛意圖和預測駕駛行為。
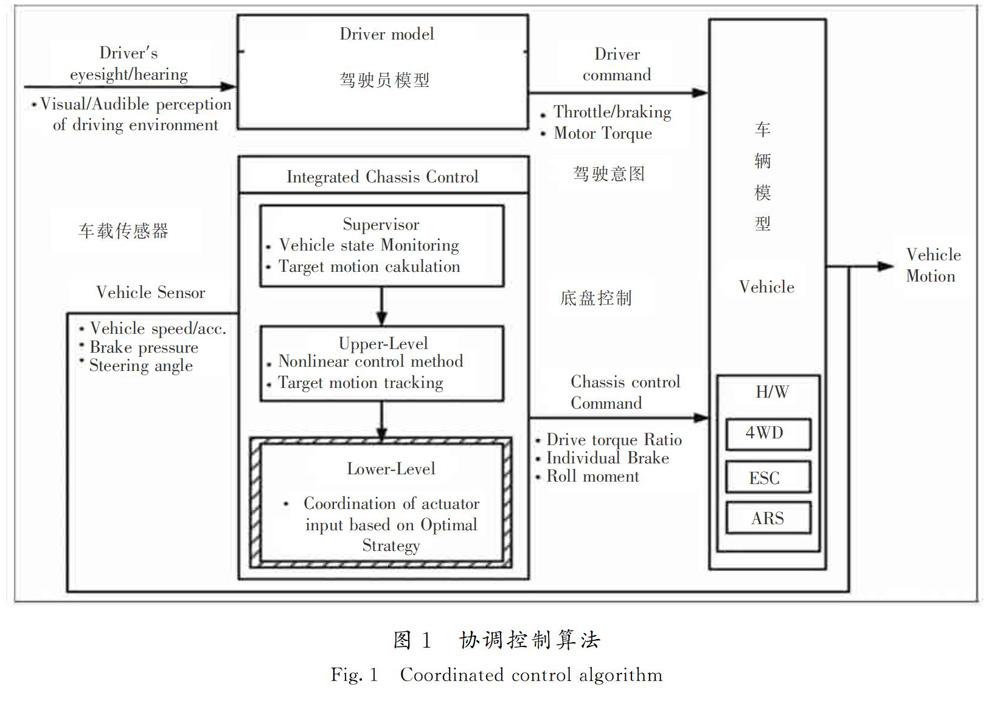
而有些科研人員則是針對具體的控制系統考慮制動意圖的影響。文獻[13]針對優化高級駕駛員輔助系統提出了一種計算效率高的算法,該算法基于3個主要概念:車輛模型、考慮駕駛員意圖和車輛周圍行人的有效碰撞檢測系統、生成預警和緊急制動信號的風險評估系統,通過駕駛仿真艙驗證發現考慮駕駛員意圖的算法有效提升了ADAS性能。文獻[14]針對車輛底盤集成控制提出了一種差動制動、前后牽引力矩和主動橫擺力矩的協調控制算法,圖1為該算法的框架圖,其設計目的是在保持車輛在車道行駛的同時,最大限度地提高行駛速度。該算法的控制基礎為駕駛員的意圖和車輛的當前狀態,采用基于優化的控制分配策略,在考慮輪胎和車輛限制的情況下,對執行機構控制輸入進行優化分配。仿真結果表明,與簡單的底盤協調控制系統相比,考慮駕駛員意圖及當前車輛工況的一體化底盤控制器,在保證高速轉彎性能的同時,保證了行駛速度的穩定性。文獻[15]提出了一種考慮安全因素的線控液壓制動控制策略,該模型由模糊制動力監控器和PI控制器組成,運用模糊推理方法識別駕駛員的制動意圖,模糊制動力監控器先根據駕駛員的制動意圖計算出理想的制動力,PI控制器再依據制動力偏差調節車輪制動輪缸壓力。
1.2國內制動意圖識別研究現狀
國內針對制動意圖識別方面的研究尚處于初步發展階段,主要深入研究了一些典型的制動意圖識別方法,尤其是在混合動力汽車及純電動汽車方面,有些成果已經轉化為產品。文獻[16]針對插電式混合動力汽車的能耗經濟型問題,運用模糊推理控制器辨識駕駛員驅動及制動意圖,建立能耗經濟性目標函數,使用瞬時優化方法對發動機和電機轉矩進行分配,以此為基礎提出了考慮駕駛意圖的能量管理策略。文獻[17]針對電動汽車制動能量回收問題,提出了基于邊界最大化的再生制動力分配策略,搭建了模糊制動意圖識別器,用以實時識別駕駛員的制動意圖,結合電池充電保護模型,運用Cruise在NEDC工況下進行仿真實驗,結果表明該能量管理策略有效提高了電動汽車的續駛里程。文獻[18]針對混合動力汽車下坡過程中駕駛員駕駛負擔重的問題,提出了一種基于駕駛員駕駛意圖的下坡輔助控制方法,即采用分層控制:上層為基于駕駛意圖的車輛行駛安全性需求;中層為采用PID控制的3種制動模式的轉矩分配策略;下層為發動機接入過程及液壓轉矩變化過程中的動態協調控制策略。經實車驗證,在混合動力汽車下坡過程中,該方法可減輕駕駛員負擔、提升行駛過程安全性且降低油耗;文獻[19—20]針對混合動力汽車的能量經濟性問題,基于模糊控制策略,研究了混合動力汽車在不同工況下加速及制動意圖識別的問題。
同時,國內有些學者還著重研究了制動意圖識別方法。文獻[21]提出了基于制動踏板平均角速度的制動意圖識別方法,研究了考慮駕駛員制動意圖對電動復合制動系統制動力分配的問題。文獻[22]為了提高行駛舒適性,針對電液復合制動系統研究了基于反向傳播神經網絡(back propagation,BP)的制動意圖識別方法。
2制動意圖分類及識別特征選取
目前,針對制動意圖的分類問題,潘寧等[22]考慮制動過程中的舒適性及安全性,將制動意圖分為常規減速、壓力跟隨及緊急制動。王慶年等[23]針對混合動力汽車的制動控制問題,依據駕駛員是否對加速/制動踏板有動作,將制動意圖分為常規制動及滑行制動,其中滑行制動即駕駛員對加速和制動踏板均未作出動作。張元才等[21]針對復合制動系統中再生制動力分配策略問題,根據駕駛員制動意圖的緊急程度將制動意圖分為輕度制動、中度制動及緊急制動。秦大同等[16]針對PHEV并聯式制動系統控制問題,依據制動模式將制動意圖分為滑行再生制動、再生制動、摩擦制動。唐先智等[24]針對電動汽車能量回收問題采用模糊C均值聚類方法研究制動意圖分類中的平緩制動、中度制動的信號表征的特征。由上可見,由于科研人員的研究目的不同,對于制動意圖的分類方法也不盡相同,且制動意圖分類的應用范圍窄,難以形成統一的標準。
制動意圖識別過程的實質即為模式識別,而模式識別的關鍵在于識別特征的選取。王英范等[25]在良好的路面上進行汽車制動實驗,采集汽車車速、制動踏板位移、制動踏板力等信號進行數據處理,最終得出制動踏板位移為制動意圖最佳識別參數。由于實際汽車制動時,其路面附著條件所對應的制動強度是不斷變化的,導致制動踏板位移的不確定性,所以為了提高實際識別效果應該結合路面條件進行駕駛員制動意圖識別研究。王波等[26]提出基于平均經驗模式分解(ensemble empirical mode decomposition, EEMD)和熵理論的駕駛員制動意圖聚類識別法,運用數字信號處理技術對制動踏板行程進行特征提取,進而運用聚類算法識別制動意圖。吳志新等[17]選用制動踏板深度、車速、SOC作為模糊制動意圖識別模型的識別參數。文獻[27]采用制動踏板開度及其變化率作為自適應神經模糊推理系統的輸入識別參數。文獻[28]針對電動汽車再生制動過程中制動意圖與制動強度的關系研究,選用制動踏板角位移引起的制動踏板電壓變化及其變化率作為模糊識別特征參數。
3制動意圖識別方法
在車輛行駛過程中,工況會發生改變,進而導致駕駛員的制動意圖隨之改變,因此,制動意圖具有高度不確定性和不可預測性。而高效的車輛橫、縱向控制系統需要實時精確的制動意圖輸入,因此,針對制動意圖的研究對于促進現代車輛動力學控制發展具有重要作用。當下針對制動意圖識別的方法主要有:模糊推理系統(fuzzy inference system, FIS)、神經網絡(neural network, NN)、自適應神經模糊推理系統(adaptive neural fuzzy inference system, ANFIS)、隱馬爾可夫模型(hidden Markov modle, HMM)、聚類分析(cluster analysis, CA)等。
3.1模糊推理系統
模糊推理法是用清晰的數學方法描述邊界不清的事物的數學理論[29]。模糊推理可以對未知模型或不能確定的模型運用模糊規則進行推理,運用人的先驗經驗對不易建模的系統運用數學語言進行有效控制。模糊推理控制系統包括系統輸入、模糊化、推理知識庫、模糊推理、解模糊化5個部分,其中影響模糊控制系統控制效果的關鍵步驟為系統輸入量及其隸屬度函數、推理知識庫的確定。雖然模糊推理法對非線性不確定系統控制有一定的優勢,但是對于其關鍵步驟的確定存在較多的人為主觀因素的影響,因此對于一些精度、實時性要求較高的車輛模型,往往達不到實際控制要求。
3.2神經網絡
神經網絡具有高度并行性和自適應學習能力,其泛化性能好、抗干擾能力強。應用于模式識別的神經網絡主要包括反向傳播網絡、徑向基函數神經網絡(radial basis function,RBF)等,由于一般任何函數都可以表示成一組基函數的加權和,因此RBF神經網絡可以逼近任何未知函數。BP神經網絡只要有足夠多的隱含層節點和隱含層,則BP神經網絡便可以逼近任意非線性映射關系[30]。基于以上特點,神經網絡通過輸入制動意圖的特征參數,使用大量的樣本,通過特定的算法訓練達到一定的精度后,便可以準確地輸出制動意圖。但是制動意圖識別效果的好壞不只是取決于一組特定的非線性關系,由于相同的制動踏板開度及其變化率在不同的路面上產生不同的制動減速度,從而造成制動性能的改變,即路面附著條件、適用車型數據的改變都會影響制動意圖識別的精度,因此工作量大、數據不具備普適性原則、收斂速度慢等成為制約神經網絡廣泛應用于制動意圖識別的因素。
3.3自適應神經模糊推理系統
基于以上對模糊推理系統及神經網絡的闡述,這兩種方法各有優勢和缺點,若將兩者的優勢進行結合,則形成一種兼顧人工主觀經驗及客觀特征數據的新型識別方法,即自適應神經模糊推理系統。該方法具備自適應學習能力、泛化性能好、抗干擾性強且能以任意精度逼近任意非線性函數等優點,能夠在一定程度上避免全憑人工主觀意志定義輸入量的隸屬度函數,因此其在處理非線性、模糊性模型上有更大的優勢,但是仍有工作量大、數據不具備普適性原則的弊端。
3.4隱馬爾科夫模型
隱馬爾科夫模型是一種特殊的動態貝葉斯網絡模型,具有較強的處理時間序列數據的能力。HMM通過建立雙重隨機過程,不但可以描述各狀態間相互轉移的馬爾科夫隨機過程,同時還可以描述各觀測變量和狀態之間統計關系的隨機過程[31]。由于駕駛員進行制動操作是時間序列上的動作過程,因此隱馬爾科夫模型具備制動意圖識別的可行性。應用HMM需要解決關于評估、解碼和學習的問題[32],其中評估問題是影響該方法識別效果的關鍵因素,即所有隱含狀態之間的轉換概率及隱含狀態到可見狀態之間的輸出概率需要提前被獲知,基于此才能完成解碼和學習。該方法的特點在于模型識別效果會因樣本量的增多而變好,目前已被普遍應用于輕度制動、正常制動、緊急制動3種制動意圖的訓練工作。該方法具有意圖識別的可行性,但實際上車輛動力學控制對于制動意圖識別結果的要求更精確具體,而此方法雖具備精確識別緊急制動意圖的能力,但不能精確完成對于常規制動意圖的識別。
3.5聚類分析
聚類分析是按照樣本的特征,依據某種相似度度量的方法將特征相同的或相似的樣本歸為一類,完成制動意圖聚類識別。聚類分析是一種簡單有效的分類器,其算法的重點是求出特征相似的聚合類,即通過計算數據流中各元素與各聚類中心的距離,計算出距離各個元素最近的每個聚類中心,進而完成對數據的分類。但制動過程中特征參數的選取問題對于聚類算法識別效果的影響較大,故應用聚類分析前通常需要對制動特征參數進行一定的預處理。唐先智等[24]先對制動踏板行程信號使用Hilbert-Huang變換以提取信號時頻域特征,運用模糊C均值聚類算法對平緩和中等制動兩種制動意圖進行識別;后又針對抑制制動踏板信號中的模式混疊現象提出了基于EEMD和熵理論的制動意圖聚類識別法,提高了制動意圖識別的準確率和實時性。
4研究展望
所介紹的各種制動意圖識別方法均能在一定程度上完成制動意圖的識別工作,且識別準確率均能達到90%以上,但也都存在不足之處。制動意圖的識別工作與線控制動系統的推廣及應用有著密切的聯系,意圖識別的準確與否決定了車輛縱向動力學控制效果的優劣,進而決定了車輛的主動安全性能。作為ADAS的底層控制基礎,制動意圖與多信息融合控制的發展對未來無人駕駛汽車及智能網聯汽車的發展與研究產生了巨大的影響。制動意圖的準確識別及應用有助于無人駕駛汽車從L3到L4的發展,而當無人駕駛汽車水平達到L5之后,制動意圖識別將會成為優化整車協調控制策略的工具之一。所以,未來面向車輛動力學控制的制動意圖識別研究,應該主要從以下幾個方面展開。
1)合理選取特征參數。特征參數的選取影響最終的識別效果。面向車輛動力學控制的制動意圖識別結果不僅需要精確,還需要強調其實時性。合理地選取特征參數有助于提高識別精度和實時性,可以考慮將路面信息作為特征提取參數之一,進而提高工況時變的車輛縱向動力學控制精度,達到較為精確、實時的控制目的。
2)轉換輸出目標。目前,針對意圖識別的工作主要是輸出平緩制動、中等制動和緊急制動、滑行制動這4種制動意圖,由于車輛縱向動力學控制需要根據不同的路面實時獲知駕駛員期望的制動強度,因此單純的輸出幾種制動意圖對于提高車輛動力學控制精度無太大作用,應考慮將制動意圖與制動強度聯結作為制動系統控制的基礎,完成對車輛的實時控制。
3)多標準評價體系。目前針對制動意圖識別的工作主要集中于意圖識別準確率上,將意圖識別準確率作為最終的評價意圖識別效果的標準。為了提高縱向車輛動力學控制性能,應當采用多標準評價體系,不僅僅需要較高的意圖識別準確率,同時還需要增加如能量回收率、制動距離、滑移率、制動減速度等評價指標。
參考文獻/References:
[1]彭曉燕. 汽車線控制動系統安全控制技術研究[D].長沙:湖南大學,2013.PENG Xiaoyan. Research on Safety Control Method of Automotive Brake System Based on X-By-Wire[D].Changsha: Hunan University,2013.
[2]何磊. 基于路面在線識別的線控制動系統制動力控制策略研究[D].長沙:湖南大學,2016.HE Lei. The Braking Force Control Strategy Based on Road Identification Technology for Brake-By-Wire System [D].Changsha: Hunan University,2016.
[3]卜未琦. 全線控純電動汽車行駛狀態估算與路面識別[D].長春:吉林大學,2014.BU Weiqi. State Estimation and Road Identification for a Full Drive-By-Wire Electric Vehicle[D].Changchun: Jilin University, 2014.
[4]袁朝春,張龍飛,陳龍.路面附著系數識別方法發展現狀綜述及展望[J].機械制造與自動化,2018,47(2):1-4.YUAN Chaochun,ZHANG Longfei,CHEN Long. Summary and prospect of development of road coefficient identification methods[J].Machine Building & Automation,2018,47(2):1-4.
[5]彭曉燕,章兢,陳昌榮.基于RBF神經網絡的最佳滑移率在線計算方法[J].機械工程學報,2011,47(14):108-113.PENG Xiaoyan,ZHANG Jing,CHEN Changrong. Calculation of RBF neural network based optimal slip ratio[J]. Journal of Mechanical Engineering, 2011,47(14):108-113.
[6]周淑文,陳慶明,孫大明.基于EMB系統的整車ABS滑模變結構控制[J].東北大學學報(自然科學版),2016,37(7):994-997.ZHOU Shuwen,CHEN Qingming,SUN Daming. Variable structure control with sliding mode for ABS of vehicle based on EMB system[J].Journal of Northeastern University(Natural Science), 2016,37(7):994-997.
[7]李頂根,張綠原,何保華.基于滑移率的汽車電子機械制動系統的模糊控制[J].機械工程學報,2012,48(20):124-129.LI Dinggen,ZHANG Lvyuan,HE Baohua. Fuzzy control based on vehicle slip-ratio for electro-mechanical braking systems[J]. Journal of Mechanical Engineering, 2012,48(20):124-129.
[8]彭曉燕,呂以濱,何磊.基于滑移率的線控制動系統制動力分配策略研究[J].中國機械工程,2016,27(17):2407-2412.PENG Xiaoyan,LV Yibin,HE Lei.Research on brake-force distribution strategies for brake-by-wire system based on slip ratio[J].China Mechanical Engineering, 2016,27(17):2407-2412.
[9]李剛,李高超.駕駛員行為意圖及特性辨識研究綜述[J].河北科技大報,2017,38(4):335-340.LI Gang,LI Gaochao. An overview on identification study of driver behavior intention and characteristic[J]. Journal of Hebei University of Science and Technology,2017,38(4):335-340.
[10]BI Luzheng,TENG Teng,GUAN Cuntai.A novel method of emergency situation detection for a brain-controlled vehicle by combining EEG signals with surrounding information[J]. IEEE Transactions on Neural Systems and Rehabilitation Engineering,2018,26(10):1926-1934.
[11]HERNNDEZ L G, MOZOS O M, FERRNDEZ J M, et al. EEG-based detection of braking intention under different car driving conditions[J]. Frontiers in Neuroinformatics,2018,12: 10.3389/fninf.2018.00029.
[12]HE Lei,ZONG Changfu,WANG Chang. Driving intention recognition and behaviour prediction based on a double-layer hidden Markov model[J]. Journal of Zhejiang University-Science C-Computers & Electronics,2012,13(3):208-217.
[13]GIRBS V, ARMESTO L, DOLS J, et al. An active safety system for low-speed bus braking assistance[J]. IEEE Transactions on Intelligent Transportation System,2016,18(2):377-387.
[14]HER H, JOA E, YI K. Integrated chassis control for optimized tyre force coordination to enhance the limit handling performance[J]. Proceedings of the Institution of Mechanical Engineers Part D-Journal of Automotive Engineering, 2015,230(8):1011-1026.
[15]XU Hui, SONG Chuanxue,LI Shoutao. Fuzzy logic control method of ehb system based on braking intention pattern identification[C]//Proceedings of the IEEE International Conference on Automation and Logistics, 2009: 10.1109/ICAL.2009.5262764.
[16]秦大同,楊官龍,胡明輝,等.基于駕駛意圖的插電式混合動力汽車能量管理策略[J].吉林大學學報(工學版),2015,45(6):1743-1750.QIN Datong, YANG Guanlong, HU Minghui, et al. Energy management strategy of plug-in hybrid electric system based on driving intention[J].Journal of Jilin University(Engineering and Technology Edition),2015,45(6):1743-1750.
[17]吳志新,石金蓬,李亞倫,等.基于制動邊界與意圖識別的再生制動策略[J].北京航空航天大學報,2017,43(8):1531-1540.WU Zhixin,SHI Jinpeng,LI Yalun,et al. Regenerative brake strategy based on braking boundary and intention recognition[J]. Journal of Beijing University of Aeronautics and Astronautics, 2017,43(8):1531-1540.
[18]韓云武,羅禹貢,李克強,等.混合動力汽車下坡輔助控制方法[J].機械工程學報,2016,52(6):136-144.
HAN Yunwu,LUO Yugong,LI Keqiang,et al. Downhill assist control method for hybrid electric vehicle[J]. Journal of Mechanical Engineering,2016,52(6):136-144.
[19]王慶年,王俊,陳慧勇,等.混合動力車輛中的加速與制動意圖識別[J].吉林大學學報(工學版),2014,44(2):281-286.WANG Qingnian,WANG Jun,CHEN Huiyong,et al.Accelerating and braking intention identification in hybrid vehicle[J]. Journal of Jilin University(Engineering and Technology Edition),2014,44(2):281-286.
[20]姬芬竹,杜發榮,朱文博.基于制動意圖識別的電動汽車能量經濟性[J].北京航空航天大學學報,2016,42(1):21-27.JI Fenzhu,DU Farong,ZHU Wenbo. Electric vehicle energy economy based on braking intention identification[J].Journal of Beijing University of Aeronautics and Astronautics,2016,42(1):21-27.
[21]張元才,余卓平,徐樂,等.基于制動意圖的電動汽車復合制動系統制動力分配策略研究[J].汽車工程,2009,31(3):244-249.ZHANG Yuancai,YU Zhuoping,XU Le,et al.A study on the strategy of braking force distribution for the hybrid braking system in electric vehicle based on braking intention[J].Automotive Engineering, 2009,31(3):244-249.
[22]潘寧,于良耀,宋健.考慮舒適性的電動汽車制動意圖分類與識別方法[J].清華大學學報(自然科學版),2016,56(10):1097-1103.PAN Ning,YU Liangyao,SONG Jian.Braking intention classification and identification considering braking comfort for electric vehicles[J]. Journal of Tsinghua University(Science and Technology), 2016,56(10):1097-1103.
[23]王慶年,孫磊,唐先智,等.HEV制動意圖識別的研究[J].汽車工程,2013,35(9):769-774.WANG Qingnian,SUN Lei,TANG Xianzhi,et al. A study on braking intention identification for HEV[J].Automotive Engineering, 2013,35(9):769-774.
[24]唐先智,王波,楊樹軍,等.基于Hilbert-Huang變換的制動意圖聚類識別[J].汽車工程,2016,38(5):580-586.TANG Xianzhi,WANG Bo,YANG Shujun,et al.Cluster identification of braking intention based on Hilbert-Huang transform [J].Automotive Engineering, 2016,38(5):580-586.
[25]王英范,寧國寶,余卓平.乘用車駕駛員制動意圖識別參數的選擇[J].汽車工程,2011,33(3):213-216.WANG Yingfan,NING Guobao,YU Zhuoping. Parameter selection for the identification of driver's braking intention for passenger car[J]. Automotive Engineering, 2011,33(3):213-216.
[26]王波,唐先智,王連東,等.基于EEMD和熵理論的電動汽車制動意圖識別方法[J].汽車工程,2018,40(8):935-941.WANG Bo,TANG Xianzhi,WANG Liandong,et al. Braking intention identification method for electric vehicles based on EEMD and entropy theory [J].Automotive Engineering, 2018,40(8):935-941.
[27]曲代麗. 基于模糊神經網絡的駕駛員制動意圖辨識技術研究[D].長春:長春工業大學,2016.QU Daili. Research on Identification Technology of Driver's Braking Intention Based on Fuzzy Neural Network[D]. Changchun: Changchun University of Technology, 2016.
[28]劉劍開,張向文.電動汽車再生制動過程制動踏板位移與制動意圖及制動強度之間的關系[J].科學技術與工程,2018,18(12):317-325.LIU Jiankai,ZHANG Xiangwen. Relationship among braking pedal displacement, braking intensity and braking strength in regenerative braking process of electric vehicle[J].Science Technology and Engineering, 2018,18(12):317-325.
[29]周潤景.模式識別與人工智能(基于MATLAB)[M].北京:清華大學出版社,2018:139.
[30]趙偉強. 商用半掛車制動意圖辨識與制動力分配控制策略開發及驗證[D].沈陽:吉林大學,2013.ZHAO Weiqiang. Development and Test of Intention Recognition and Braking Force Distribution Control Strategies for Tractor-Semitrailer[D].Shenyang:Jilin University,2013.
[31]趙軒,馬建,汪貴平.基于制動駕駛意圖辨識的純電動客車復合制動控制策略[J].交通運輸工程學報,2014,14(4):64-75.ZHAO Xuan,MA Jian,WANG Guiping. Composite braking control strategy of pure electric bus based on brake driving intention recognition[J]. Journal of Traffic and Transportation Engineering,2014,14(4):64-75.
[32]張文波. 基于隱馬爾可夫模型的EHB系統制動意圖識別方法研究[D].長春:長春工業大學,2014.ZHANG Wenbo.Braking Intention Recognition for EHB System Based on Hidden Markov Model [D].Changchun: Changchun University of Technology,
