一種混合制式機場跑道異物探測系統
2019-06-12 06:13:50王瑾
科技視界 2019年9期
王 瑾
(中國民用航空局第二研究所,四川 成都610041)
0 引言
跑道異物(FOD)指的是任何不屬于機場但出現在機場運作區域并可能對機場造成損失或者飛機造成損害的外來物品[1]。 跑道異物直接影響著飛機的運行安全,一小塊塑料布被吸入發動機會引起空中停車, 一個小螺釘或金屬片甚至尖銳石子將會扎上輪胎引起爆胎[2]。
為解決人工道面巡查對跑道道面占用,影響航班通行能力的問題,國內外均已開展自動化的機場跑道異物探測系統的研究,現有系統均為單一的塔架式探測系統或邊燈式探測系統,邊燈式探測系統檢測率高,實時性好,但造價貴,維護困難;塔架式探測系統的位置和高度受制于機場保護區域相關規定, 不能很好發揮性能,但部署成本相對較低且維護相對容易。
本文中所提出的混合制式機場跑道異物探測系統綜合了塔架式探測系統和邊燈式探測系統的優點,將跑道道面按照重要程度進行劃分,分別部署塔架式FOD 傳感器或邊燈式FOD 傳感器, 使得系統探測性能滿足機場實際需求的同時造價更低, 解決了單一制式FOD 探測系統對于機場安全保障需求和成本預算之間的矛盾。
1 現有主流FOD 探測系統
從現有主流FOD 探測系統采用的技術手段和部署方式來看,FOD 探測系統可分為以下四類: 塔架式光學FOD 探測系統、塔架式光電混合FOD 探測系統、邊燈式光電混合FOD 探測系統以及車載式FOD 探測系統。
1.1 塔架式FOD 探測系統
該類系統傳感器安裝在塔架上面,塔架部署在距跑道中線上百米以外。 按傳感器技術類型,又可細分為純光學式FOD 探測系統和光電混合式FOD 探測系統兩大類。
純光學式FOD 探測系統依靠光學傳感器實現對機場跑道區域的遠距離監測, 通過圖像處理技術發現和識別異物。 典型的代表為新加坡Stratech 公司的iFerret 系統。
光電混合式FOD 探測系統依靠毫米波雷達傳感器實現對機場跑道區域的遠距離監測,發現和識別異物;通過光學傳感器對發現的異物進行確認。 典型的代表為英國Qinetiq 公司的Tarsier 系統。
1.2 邊燈式FOD 探測系統
該類系統傳感器安裝于跑道邊燈旁邊,依靠毫米波雷達傳感器和光學傳感器實現對機場跑道區域的近距離監測。 典型代表為以色列Xsight 公司的FODetect 系統。
1.3 車載式FOD 探測系統
該類系統傳感器安裝在可移動的車輛上面,在工作過程中,邊移動,邊掃描,邊檢測,邊清理,通過毫米波雷達進行檢測,光學相機用于拍照確認。 典型代表為美國Trex 公司的FODFinder 系列。變得簡單容易。
相比于單一的塔架式或邊燈式FOD 探測系統,混合制式FOD 探測系統具有以下優勢:
(1)采用邊燈式雷達光學復合傳感器監視跑道兩端接地帶,探測性能好,受天氣影響小,可有力保障跑道關鍵區域的運行安全;
(2)采用塔架式傳感器監視跑道中部滑跑區域,以此降低設備數量和維護難度,使系統整體做到性能和造價綜合性最優;
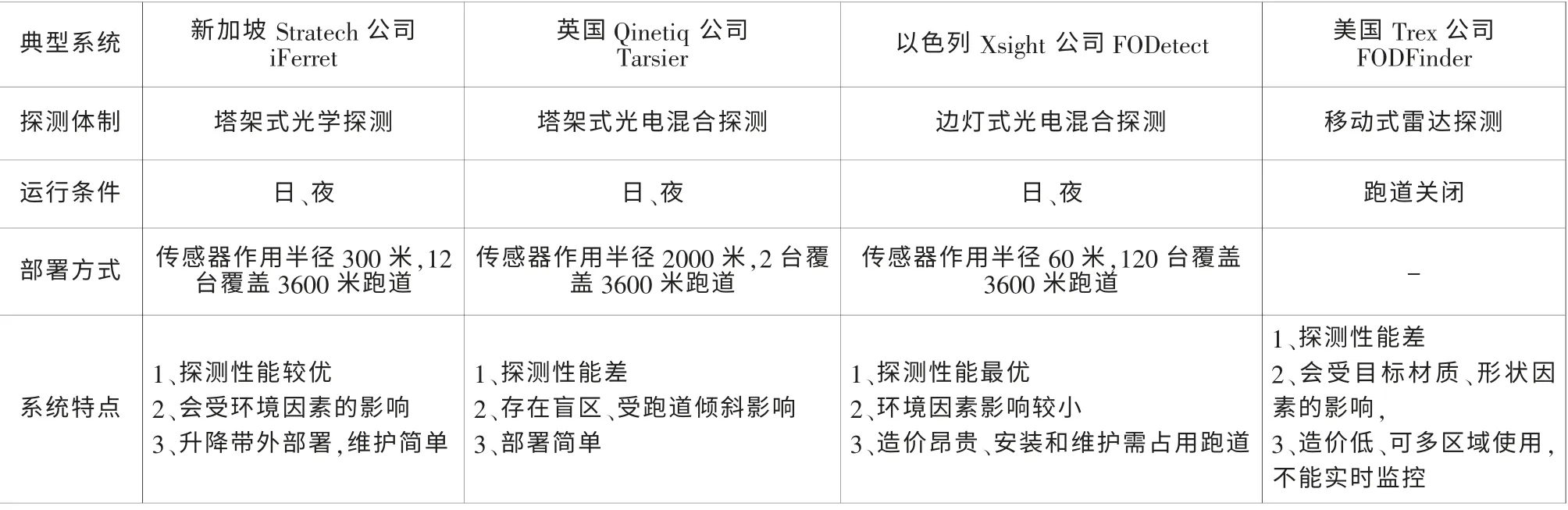
表1 四種典型FOD 探測系統技術體制對比
2 混合制式機場跑道異物探測系統
綜合以上各型機場跑道FOD 探測系統的特點,不難發現,現有FOD 探測系統解決方案中,移動式系統造價最低,但工作時需要關閉跑道,不能實時監控相關區域,影響機場運行效率;邊燈式系統檢測率高,實時性好,但造價貴,維護困難;塔架式系統的位置和高度受制于機場保護區域相關規定, 不能很好發揮性能,但部署成本相對較低且維護相對容易。
以上方案均未根據跑道監視熱點區域和系統冗余度設計部署方案,導致系統性能不是最優,且造成資源浪費。 有必要綜合塔架式和邊燈式系統優點, 研制一款符合機場運行特點的FOD 探測系統。
2.1 混合制式機場跑道異物探測系統設計思想
混合制式機場跑道異物探測系統,按照重要程度和運行特點對機場跑道的不同區域進行層次劃分,在接地帶等重要區域布置檢測率高,實時性好但造價昂貴,維護困難的邊燈式光電復合FOD 傳感器, 在其它區域布置性能一般但成本較低維護簡單的塔架式光學FOD 傳感器。 這樣就解決了單一制式FOD 探測系統對于機場安全保障需求和成本預算之間的矛盾,并且系統部署與傳感器部署設計獨立區分,減少了施工部署方面的要求,模塊化結構使得維護
(3) 充分利用塔架式傳感器的高分辨成像能力,提供厘米分辨率級跑道全景成像的附加功能,為飛行區道面管理提供全新的視角。
2.2 系統總體架構
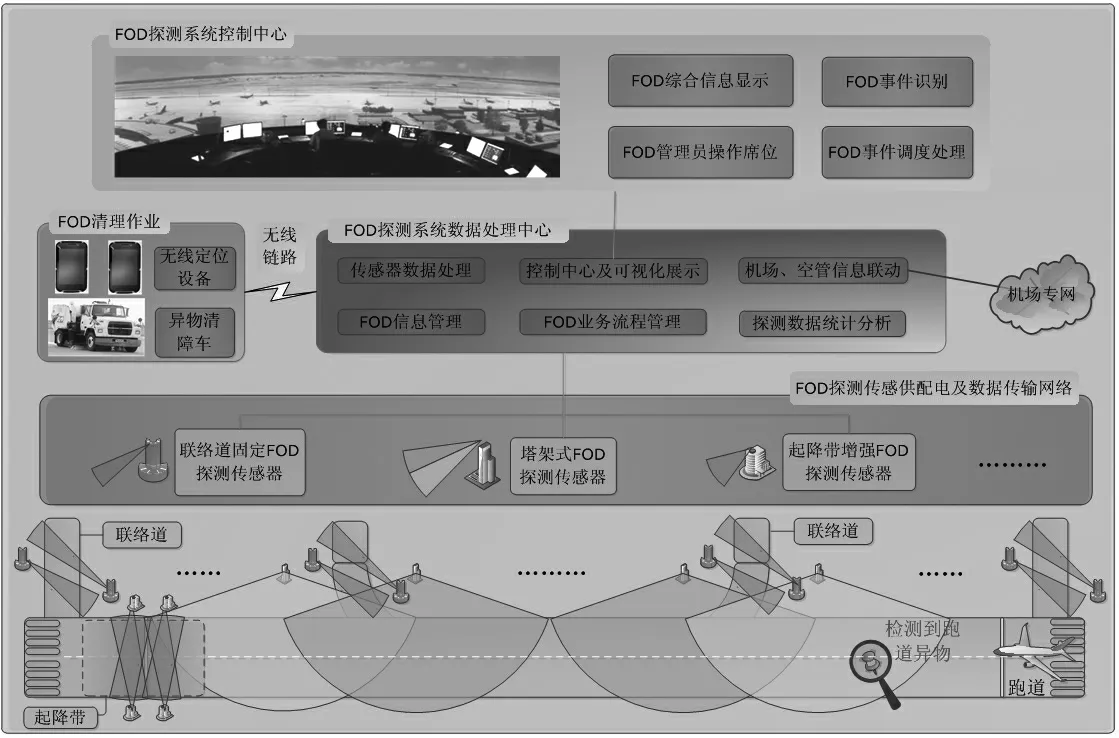
圖1 混合制式機場跑道異物探測系統總體架構圖■
如圖1 所示, 混合制式FOD 探測系統由FOD 探測傳感器 (邊燈式光電復合FOD 傳感器或塔架式光學FOD 傳感器)、FOD 信息系統(FOD 探測系統數據處理中心和FOD 探測系統管理軟件) 以及配套供電及數據傳輸設施等共同組成。 其中FOD 傳感器安裝于跑道側方,對跑道道面進行實時監測,得到道面的視頻圖像數據或雷達反射數據;后臺FOD 信息系統使用數據庫服務器、應用服務器、視頻管理服務器以及移動終端等對數據進行分析處理得到FOD 信息, 并為機場用戶提供FOD 報警,遠程視頻確認,FOD 詳細信息等;之后將FOD 信息下發至FOD 清理作業人員的手持終端上, 引導其迅速到達現場進行清理;同時所有的FOD 數據都將被存儲,以便機場用戶隨時回溯, 并將定時對FOD 進行分析與統計,以圖表的方式提供給機場用戶。
3 系統設計與實現
3.1 邊燈式光電復合FOD 傳感器
邊燈式光電復合FOD 傳感器具有探測性能好、響應速度快的特點。 邊燈式光電復合FOD 傳感器單元部署一般遵循助航燈具相關技術要求,并且支持與跑道邊燈集成安裝以降低部署成本。 傳感器沿跑道兩側按60米等間隔對稱安裝,其作用半徑正常模式下可達45 米,增強模式下可達60 米。 整條跑道實現全覆蓋需要部署上百個節點。 邊燈式光電復合FOD 傳感器單元及覆蓋部署示意如圖2 所示。
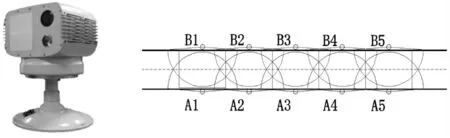
圖2 邊燈式光電復合FOD 傳感器單元及覆蓋部署
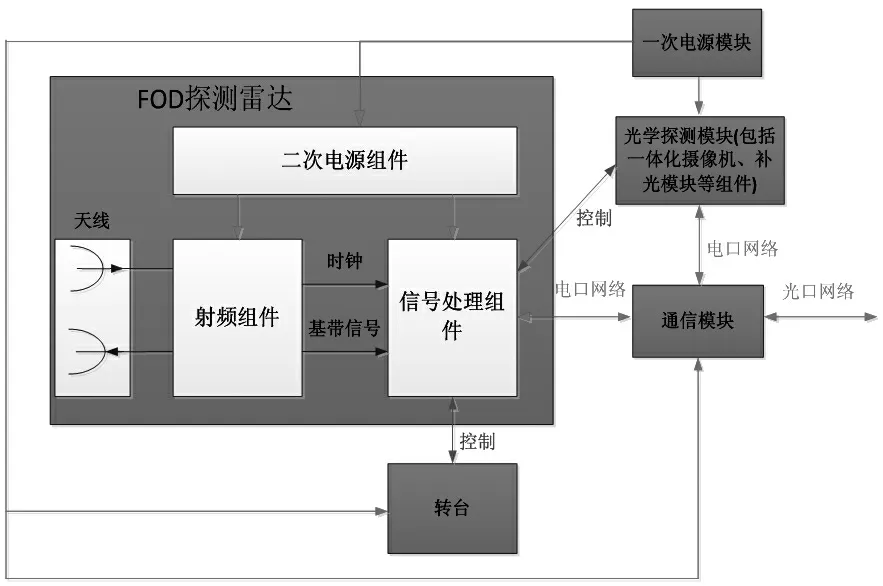
圖3 邊燈式光電復合FOD 傳感器組成示意圖
邊燈式光電復合FOD 傳感器采用集成化設計,主要由FOD 探測雷達、FOD 光學探測模塊、小型轉臺、易折件、電源模塊、通信模塊等共同構成。傳感器組成示意圖如圖3 所示。 FOD 探測雷達和FOD 光學探測模塊分別獨立執行FOD 探測功能。 FOD 探測雷達通過發射電磁波并對回波信號進行接收處理得到機場跑道異物的相關信息,FOD 光學探測模塊則對跑道進行高清晰度光學成像,FOD 探測雷達和FOD 光學探測模塊均通過光纖將各自所探測到的相關信息傳輸給后臺FOD 信息系統,FOD 信息系統對相關數據進行運算處理和數據融合,最終實現光電復合的FOD 探測,跟蹤和識別功能。
3.2 塔架式光學FOD 傳感器
塔架式光學FOD 傳感器具有探測距離遠, 維護簡單,價格較低等優點。 塔架式光學FOD 傳感器部署一般距離跑道中線超過150 米,沿跑道一側按300 米等間隔安裝,其作用半徑可達350 米,增強模式下作用半徑可達400 米,整條跑道僅需十幾個節點即實現全覆蓋。 塔架式FOD 傳感器單元及覆蓋部署示意如圖4 所示。
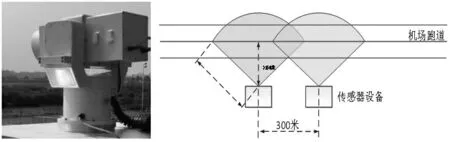
圖4 塔架式光學FOD 傳感器單元及覆蓋部署
塔架式光學FOD 傳感器主要由高清光學鏡頭、數字攝像機、對焦模塊、網絡通信模塊、補光模塊和精密伺服轉臺組成。 傳感器組成示意圖如圖5 所示。 高清光學鏡頭與數字攝像機構成成像單元, 對跑道道面進行高清晰度成像; 對焦模塊用于控制成像單元的自動變倍變焦;網絡通信模塊實現數據傳輸;精密伺服轉臺用于承載各模塊并提供方位控制; 補光模塊用于夜晚低能見度情況下對道面成像區域的補光。
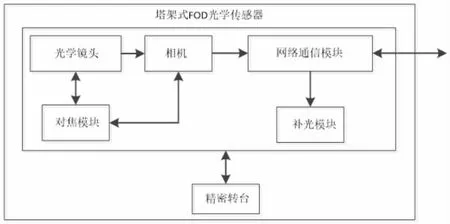
圖5 塔架式光學FOD 傳感器組成示意圖
3.3 FOD 信息系統
FOD 信息系統負責系統中各FOD 傳感器數據的分析處理與融合,并實現對整個FOD 探測系統的控制和管理。
FOD 信息系統支持不同技術制式的FOD 傳感器數據接入,并采用高性能服務器陣列對傳感器數據進行處理、分析和融合。 當辨識出跑道上的異常FOD 目標時,系統對FOD 目標自動取證并通過控制中心的控制臺向管理人員報警。 管理人員可以在控制臺對疑似FOD 進行遠程視頻鑒定以完成FOD 確認。
被確認的FOD 信息,包括精確跑道位置、異物圖像、 威脅等級等被系統通過無線網絡發送到值班清理人員的手持終端上。 值班人員通過手持終端引導到達FOD 現場,完成現場拍照取證和異物清理。 最后取證和清理信息通過無線網絡上傳數據中心完成FOD 數據分析和解除FOD 告警。
系統在提供FOD 監視、 清理和取證等服務的同時,還提供完善的FOD 業務管理流程,包括業務管理、人員管理、FOD 業務分析等。
4 系統測試
為了驗證混合制式機場跑道異物探測系統的實際性能,在機場跑道道面進行了大量的實際現場測試。 將邊燈式光電復合FOD 傳感器和塔架式光學FOD 傳感器安裝于相應位置,在檢測區域內任意放置異物,并多次重復試驗,以獲取足夠的統計數據。其中,在異物集的選取中,在民航局機場司咨詢通告的基礎上,結合機場實際情況,對異物集進行了適當擴展。
經大量實際現場測試,混合制式機場跑道異物探測系統在白天天氣晴朗的情況下,對標準樣件的檢測率可以達到100%,對非標準異物(含實物樣件和擴展異物)的檢測率可以達到96.4%。 同時,在黑夜,雨天,霧天等環境下,混合制式機場跑道異物探測系統的探測性能也滿足民航局機場司咨詢通告中的相關要求。
5 結束語
目前,該混合制式機場跑道異物探測系統已在國內多個機場開始試運行,機場實際測試表明,系統采用的塔架式FOD 光學傳感器與邊燈式FOD 光電復合傳感器結合的方式能夠滿足機場實際需求, 實現對跑道異物的準確檢測,定位及管理。
