智能迎賓機器人的研究與設計
2019-06-27 10:01:04陳落根方志煒張東海
上海電氣技術 2019年2期
陳落根, 褚 佳, 方志煒, 許 健, 張東海, 陳 文
杭州娃哈哈精密機械有限公司 智能裝備研究所 杭州 310018
1 研究背景
迎賓機器人是一類可以與人進行交互,具有迎賓、指引、對話、幫助、提示、引流、促銷等功能的機器人,具有極大的市場潛力,同時對快速消費品營銷方式有重大促進作用[1-2]。目前,國內外機器人公司和科研機構都將迎賓機器人作為未來吸引實體流量的重要入口,投入大量資源進行開發和推廣。近幾年,隨著人工智能的快速發展,迎賓機器人在語音交流、人臉識別、自主移動控制方面有了巨大進步。
迎賓機器人的主要代表產品有日本軟銀的佩珀機器人、中國科學技術大學的曉醫機器人、科大訊飛的佳佳仿真人等,依次如圖1、圖2、圖3所示。這些機器人雖然技術先進,但是價格十分昂貴,動輒幾十萬元,不利于在市場上推廣使用。
筆者研發的智能迎賓機器人具有一定自主導航能力、現場操控能力和遠程遙控能力,具備自主對話與輔助對話功能,且成本不高,科技感十足,對于提高公司科技形象可以起到事半功倍的效果,具有一定的應用價值和推廣前景。

圖1 佩珀機器人

圖2 曉醫機器人

圖3 佳佳仿真人
2 功能分析
筆者為娃哈哈公司30周年慶典設計了一對智能迎賓機器人。機器人需要有禮貌地迎送賓客,同時需要與客人互動,宣傳娃哈哈公司,具有仿人類外形、肢體動作互動、語音交互、面部表情、可移動等功能。在設計中,在頭部的眉毛和嘴巴處嵌入發光二極管燈,配合各個場景做出不同的面部表情,并播放迎送語音,實現人機互動。通過設計使機器人能夠移動,頭部和手臂能夠實現點頭和擺臂等肢體動作,與客人進行熱情互動。
3 性能指標
智能迎賓機器人具有接近成人的長、寬、高尺寸,男版高170 cm,女版高160 cm。機器人能夠遙控行走和自主行走,具有從文本到語音的播放功能和語音交互功能,并能夠通過現場移動電話藍牙控制和遠程虛擬專用網絡控制。機器人手臂具有多自由度功能,可以完成揮手、握手等動作。機器人頭部具有多自由度功能,可以完成點頭、表情等功能。機器人能夠將現場情況通過視頻傳回控制端,移動速度可達30 m/min,爬坡能力可達5°,連續工作時間長于8 h。
4 機械系統設計
4.1 整體結構
智能迎賓機器人的機械結構主要分為底盤、機身、手臂及頭部四個部分。其中,底盤負責機器人的行走運動,手臂可以做出簡單的肢體動作與客人互動,機身支撐整個機器人零部件,機身內部可以布置控制系統模塊[3]。機器人內部骨架采用鋁合金型材搭建,外殼采用三維打印技術制作,材料使用聚乳酸。機器人整體設計模型如圖4所示。
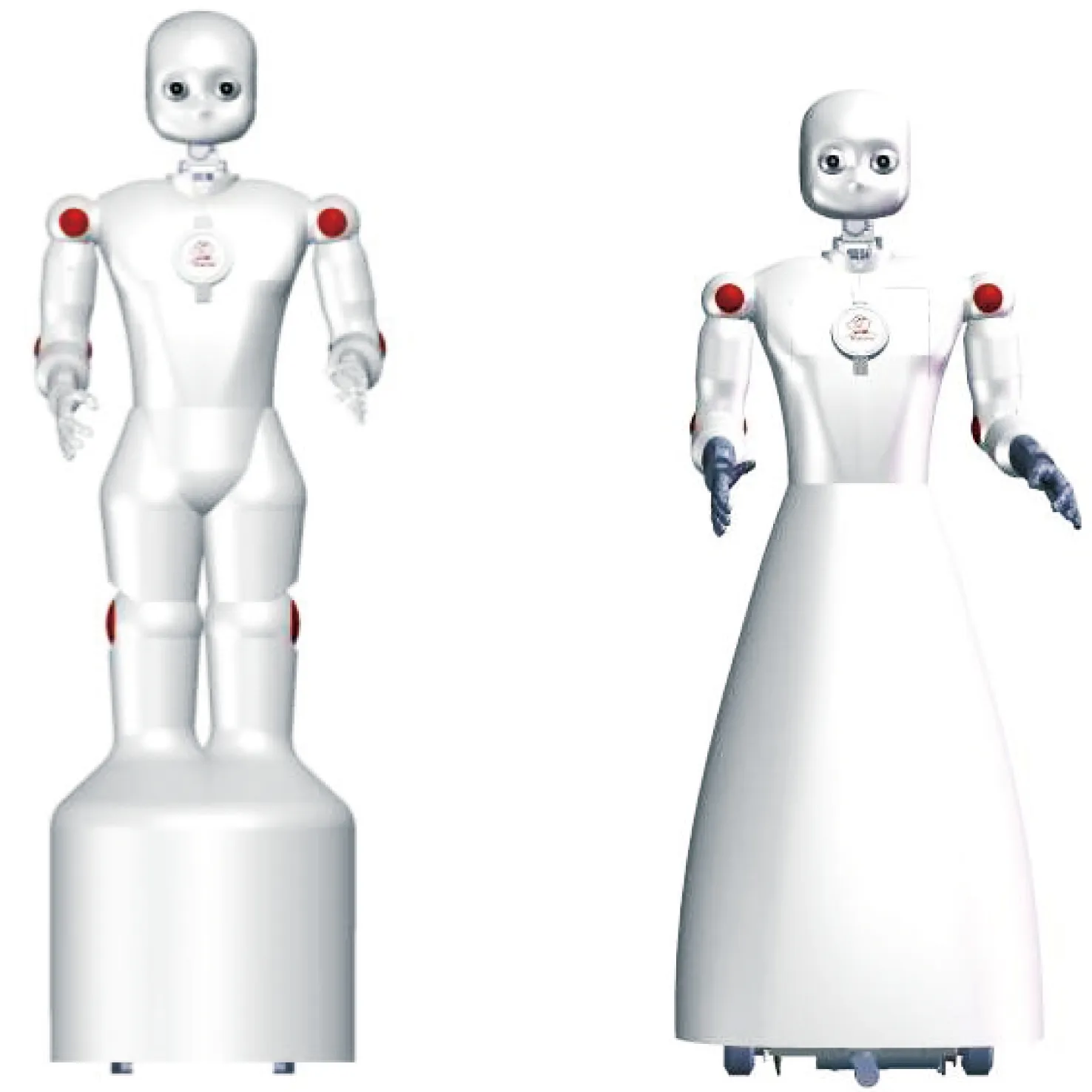
圖4 智能迎賓機器人設計模型
4.2 頭部
智能迎賓機器人需要實現表情互動,完成點頭、搖頭、微笑、口形變換、眨眼等動作。在機器人頸部設計了兩個旋轉軸,實現點頭和搖頭動作,均由舵機驅動。眉毛處設計了條形發光二極管燈,通過控制燈的變換來模擬眨眼表情。嘴巴處設計了發光二極管燈,通過控制燈的變換來實現微笑和口形變換動作。兩只眼睛黑色部分為攝像頭,用于監控現場情況。發光二極管燈的變換配合頸部的運動,組合成機器人的多種表情,實現人機互動。智能迎賓機器人頭部模型如圖5所示。

圖5 智能迎賓機器人頭部模型
4.3 手臂
設計手臂使其不但在外形上像人體手臂,而且在功能上也可以模仿人體手臂完成擺臂、揮手、握手等簡單動作[4-6]。對于手臂自由度的分布,德國機器人學專家Adam Morecki提出了肩部三個、肘部一個、腕部三個的七自由度劃分理論[7-9]。筆者設計時對手臂動作的要求不高,因此采用六自由度仿人手臂構型,關節為轉動形式,結構較為簡單,并且易于控制。所有手指通過繩索驅動,只有一個自由度,可以實現抓握動作。智能迎賓機器人手臂自由度如圖6所示,構型方案如圖7所示,設計模型如圖8所示。
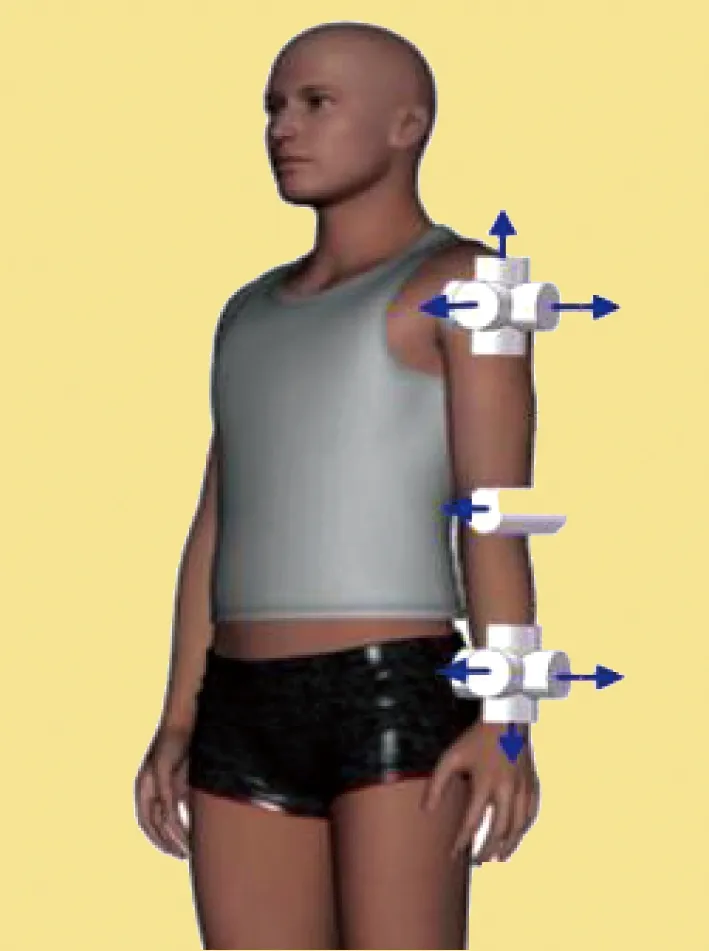
圖6 智能迎賓機器人手臂自由度
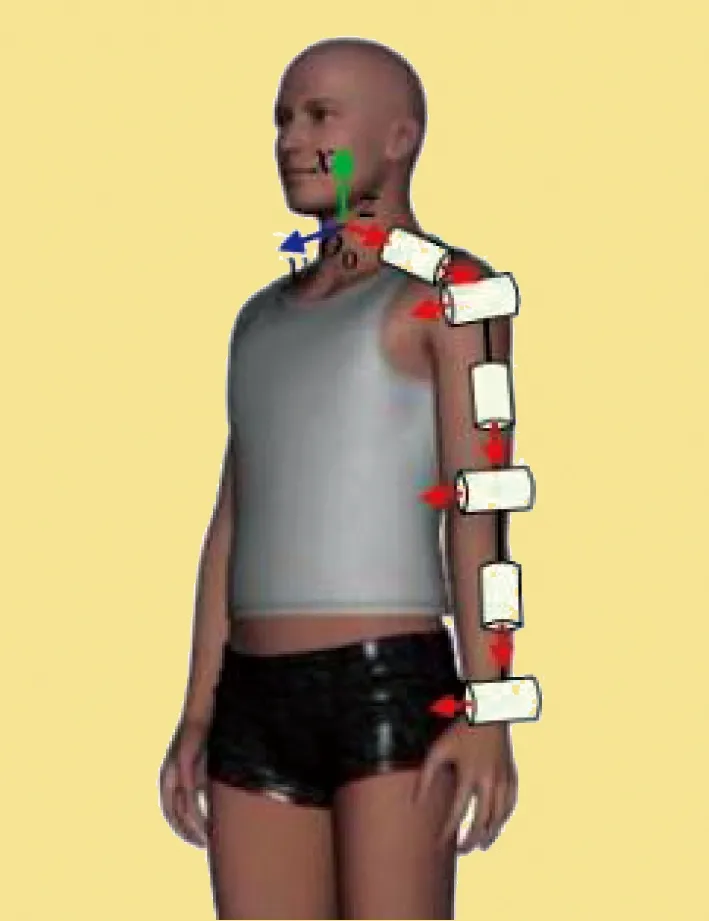
圖7 智能迎賓機器人手臂構型方案
4.4 底盤
智能迎賓機器人的活動場地一般比較平整,活動空間較小,通常采用輪式結構,如圖9所示。機器人底盤由安裝架、兩個萬向輪、兩個驅動輪組成,其中兩個萬向輪前后對稱布置,兩個驅動輪左右對稱布置。底盤的驅動系統包括直流伺服電機、行星齒輪減速器、伺服驅動器,采用差動運動方式,通過控制左右輪的不同轉速來實現底盤的不同運動。這種底盤結構簡單,動作靈活。

圖8 智能迎賓機器人手臂設計模型
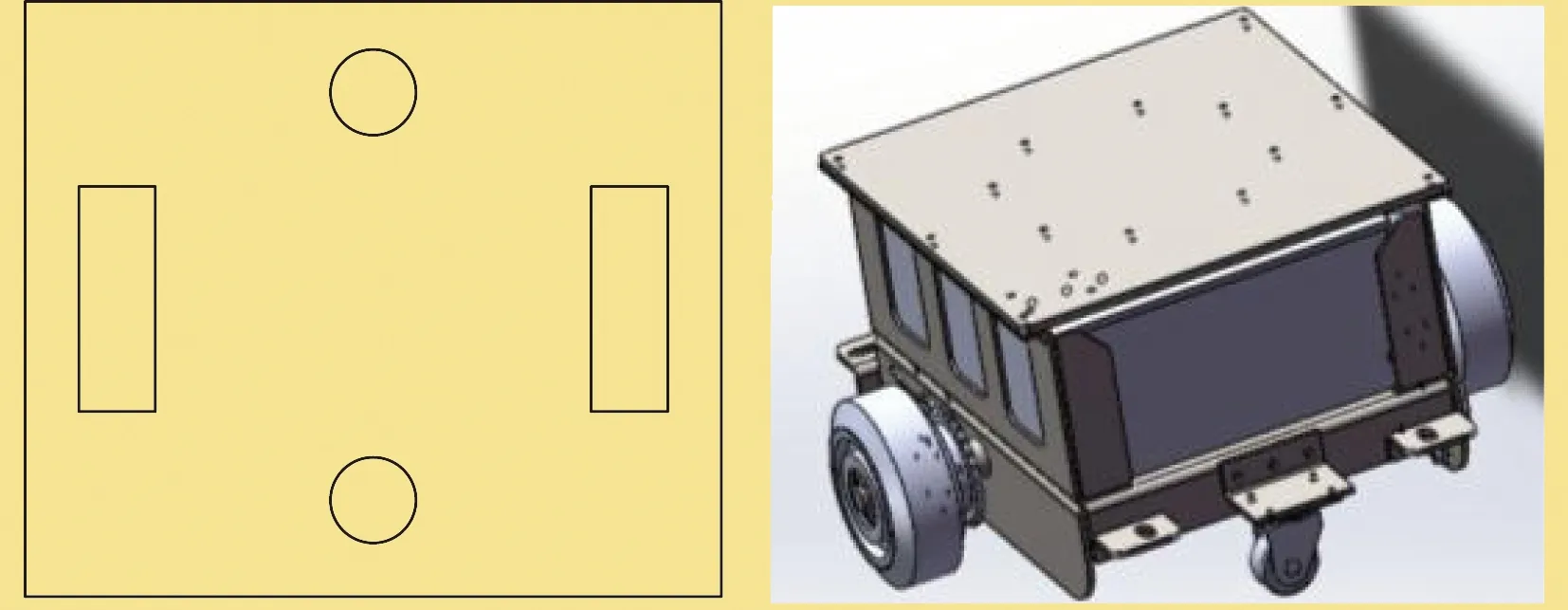
圖9 智能迎賓機器人底盤結構
5 控制系統整體框架
智能迎賓機器人控制系統用于實現機器人行走控制、自主導航、語音交互、安全防護、遠程監控等功能[10-11]。控制系統整體框架如圖10所示,可分為上位機控制和底層控制兩個部分。機器人上位機控制由藍牙控制終端、遠程計算機控制終端、遠程監控終端組成,是人機操作的主要接口,提供操作界面和監控界面。
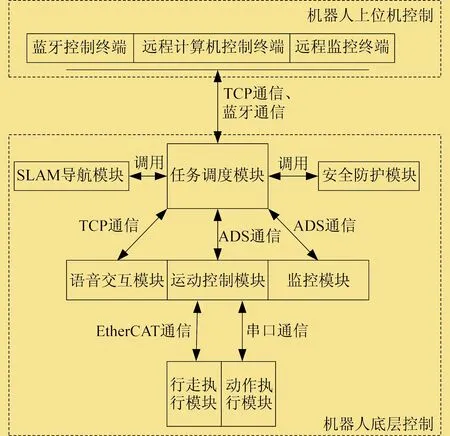
圖10 智能迎賓機器人控制系統整體框架
機器人底層控制部分由任務調度模塊、同步定位與建圖(SLAM)導航模塊、安全防護模塊、語音交互模塊、監控模塊、運動控制模塊、行走執行模塊、動作執行模塊組成,負責解釋和執行上位機指令,檢查機器人的安全情況,上傳機器人監控視頻與語音等信息。任務調度模塊是機器人底層控制的核心模塊,執行指令解釋,生成任務并分配至其它模塊,管理其它模塊的運行。SLAM導航模塊采用激光雷達導航技術,創建環境地圖,并可以自主生成路徑。安全防護模塊負責檢測機器人運行過程中的失控碰撞等風險因素,當出現危險情況時,及時通知任務調度模塊進行緊急規避。語音交互模塊實現人機語音交互功能。監控模塊建立監控服務,將機器人攝像頭和傳聲器等設備的監控內容向監控端傳播,實現監控功能。運動控制模塊負責執行任務調度模塊下達的運動任務,具體由行走執行模塊和動作執行模塊負責,其中行走執行模塊實現機器人的移動功能,動作執行模塊實現機器人臉部表情、頭部動作、手部動作控制功能。
智能迎賓機器人上位機控制與底層控制通過傳輸控制協議(TCP)通信和藍牙通信連接,機器人底層控制模塊間的連接有TCP通信、自動化設備規范協議(ADS)通信、以太網控制自動化技術(EtherCAT)通信、串口通信。
6 上位機控制系統
6.1 遠程控制終端
遠程控制終端是一個基于C#語言軟件窗口框架(WinForm)編程得到的圖形用戶界面,可以連接工控機控制機器人,通過TCP通信的方式與機器人底層控制部分交換信息。遠程控制流程如圖11所示,主要功能有遠程登錄及控制設備連接、機器人行走控制、從文本到語音的發送、機器人頭部和手部控制等。
6.2 行走控制功能
完成登錄及設備連接后,行走及動作控制部分的界面將會被激活。
行走控制提示界面如圖12所示,該界面在控制按鈕按下時,會改變界面中代表相應控制功能的圖標顏色,起到提示作用。
6.3 動作控制功能
動作控制功能界面如圖13所示。用戶可以選擇各種頭部、手部動作,點擊運動按鈕控制機器人的頭部和手部動作。對于使用發光二極管燈的眉毛和嘴部,其控制功能可以通過眉毛和嘴部滑動按鈕進行控制。
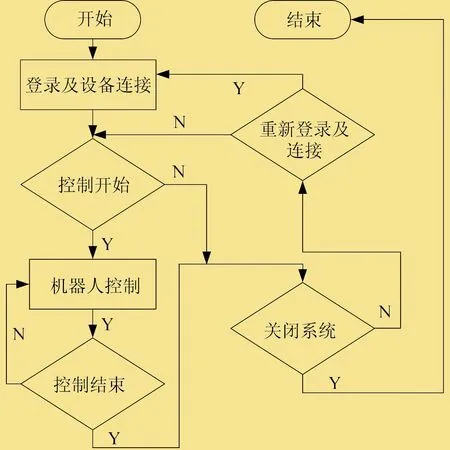
圖11 遠程控制流程
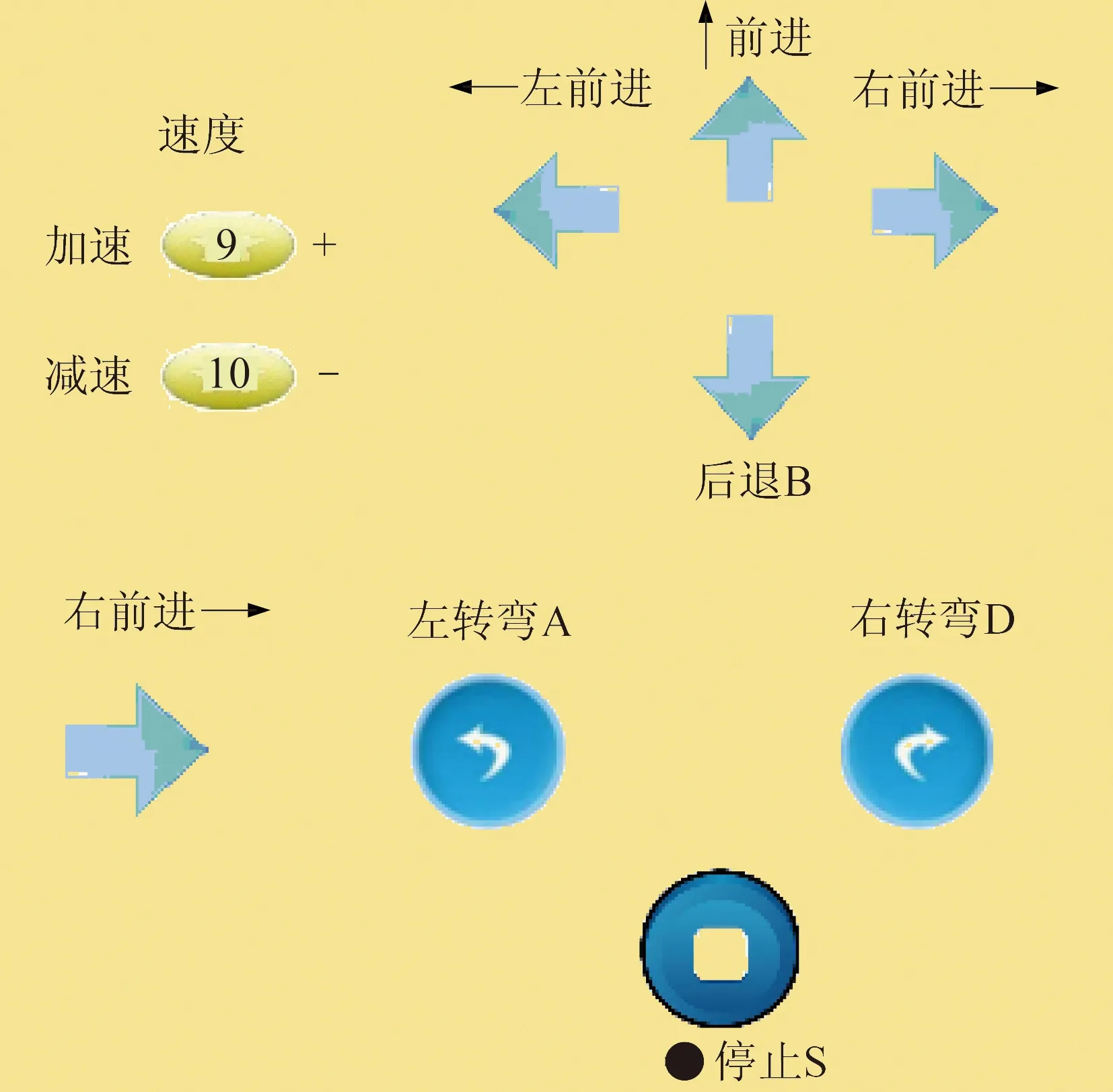
圖12 行走控制提示界面
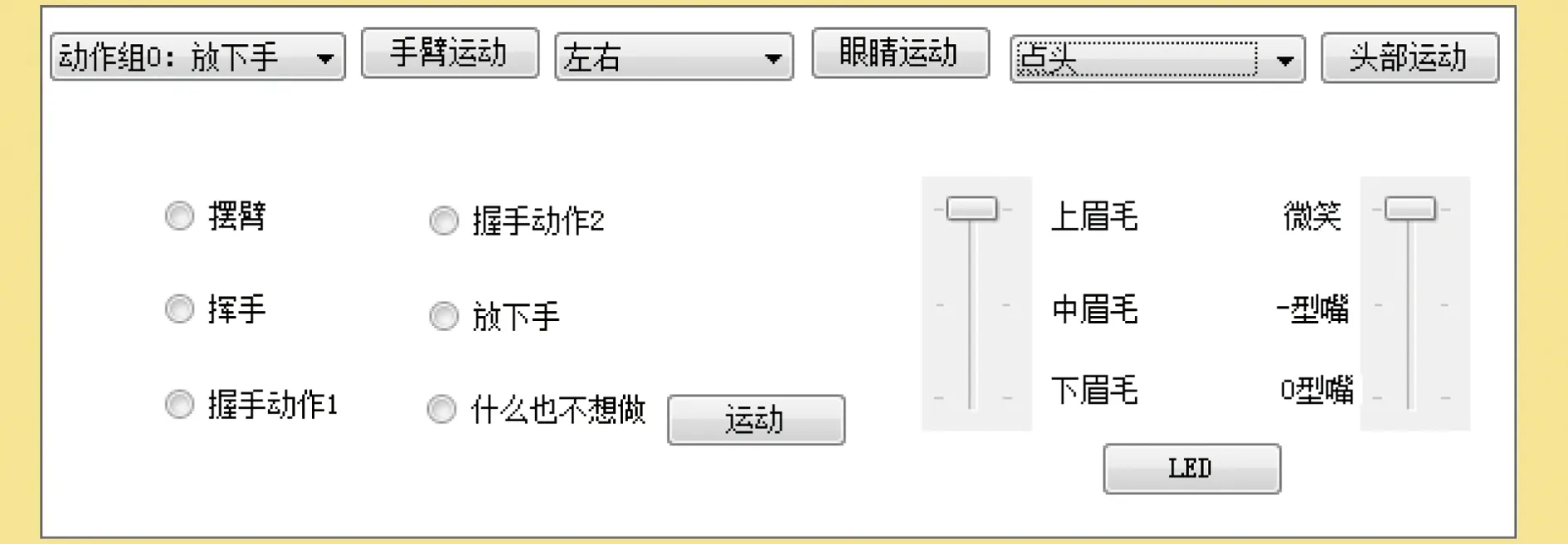
圖13 動作控制功能界面
6.4 頭部獨立控制功能
頭部獨立控制界面如圖14所示,該界面用于頭部電機的控制,通過滑動按鈕可以改變頭部電機的位置。點擊獨立控制選項可以進入該界面。

圖14 頭部獨立控制界面
7 底層控制系統
7.1 任務調度模塊
任務調度模塊是智能迎賓機器人控制系統的核心模塊之一,負責底層控制模塊的調度,以及與上位機控制系統的通信。任務調度模塊如圖15所示,通過建立一個TCP主控端,與上位機控制系統建立TCP通信。模塊內部有一個命令緩沖區和狀態緩沖區。命令解釋器負責讀取命令緩沖區內的命令,并針對命令的類型進行分配,語音命令分配至語音模塊,運動命令分配至運動控制模塊。監控模塊將機器人的狀態反饋至任務調度模塊的狀態檢查器,狀態檢查結果反饋至運動任務規劃器和狀態緩沖區。
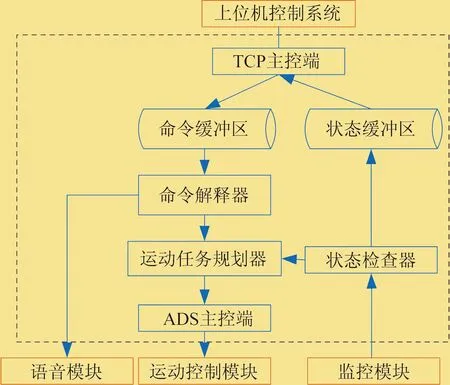
圖15 任務調度模塊
7.2 運動控制模塊
運動控制模塊是運動任務的執行模塊,如圖16所示。運動控制模塊接收任務調度模塊發送的運動數據,軌跡規劃器和動作選擇器根據運動數據進行具體規劃,再通過插補器將具體電機運動數據傳輸至下一層。行走執行模塊和動作執行模塊控制機器人的底盤移動方向,控制方法為比例積分微分控制。
7.3 語音交互模塊
語音交互模塊受到任務調度模塊的調用,負責機器人的語音交互功能,包含智能對話和文字閱讀兩種模式。語音交互模塊如圖17所示。
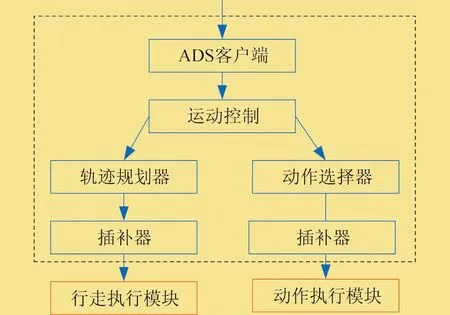
圖16 運動控制模塊
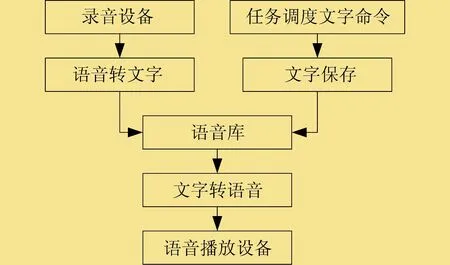
圖17 語音交互模塊
在智能對話模式下,語音交互模塊采用錄音設備錄下語音,再將語音轉換為文字輸入語音庫。語音庫產生文字形式的回答,隨后將該回答由文字轉換為語音文件,通過設備播放,從而完成一次對話。
在文字閱讀模式下,任務調度模塊將上位機控制系統傳輸來的文字語音信息發送至語音交互模塊進行保存,語音交互模塊同樣將文字輸入語音庫,并將回答轉換為語音進行播放。
7.4 SLAM導航模塊
SLAM導航模塊通過激光雷達掃描環境,采用SLAM算法進行地圖的構建和定位,通過地圖導航算法進行路徑規劃,路徑數據輸出至任務調度模塊[12]。SLAM導航模塊如圖18所示。
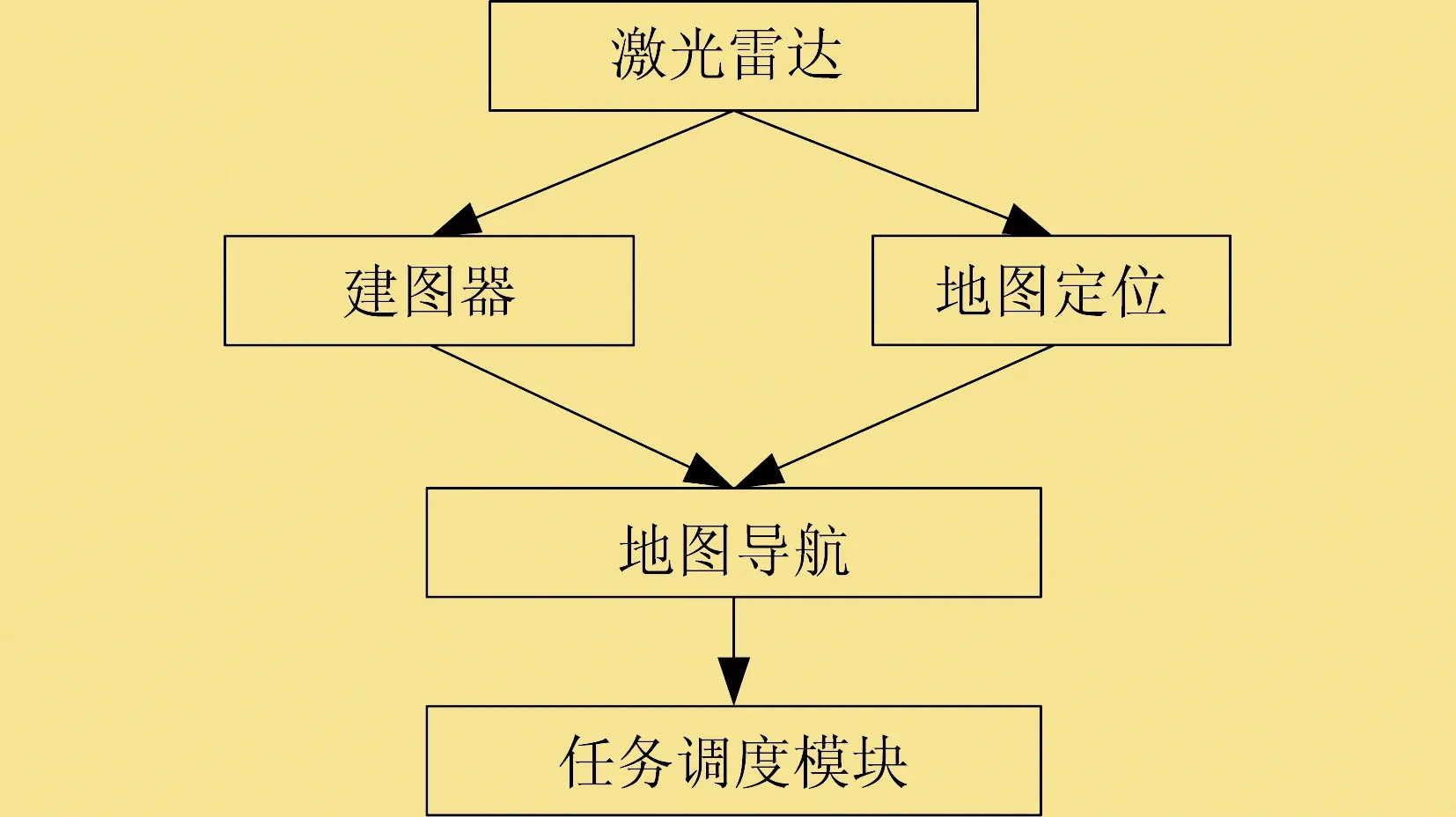
圖18 SLAM導航模塊
7.5 安全防護模塊
安全防護模塊是智能迎賓機器人系統的重要組成部分,能夠及時檢測機器人的不正常運轉和危險操作,保護人機安全。安全防護模塊如圖19所示,激光雷達和超聲傳感器能夠檢測機器人與障礙物之間的距離,當距離小于安全閾值時,安全邏輯會作用于任務調度模塊,糾正危險操作。電機運轉檢測用于檢測機器人各個部位電機的位置、速度、電流等參數,當電機出現異常時,安全防護模塊會及時使機器人停止運轉,并進行警報。

圖19 安全防護模塊
8 結束語
筆者為娃哈哈公司30周年慶典研發了一對智能迎賓機器人,這對智能迎賓機器人應用在慶典現場接待賓客,并在暖場活動中工作效果良好,吸引了大量人氣。
筆者介紹了智能迎賓機器人的總體性能、機械結構設計、控制系統架構及核心模塊。機器人在慶典現場實現了自主運動和避障,并具有較強的交互性。筆者所做研究為后續開發更加智能的服務機器人提供了技術經驗。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
中國科技論壇(2017年7期)2017-07-25 08:49:53
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
少兒科學周刊·少年版(2015年4期)2015-07-07 20:56:37
