基于徑向基過程神經網絡的航空發動機排氣溫度預測
2019-07-05 01:10:18陳慶貴李洪偉謝鎮波
兵器裝備工程學報 2019年6期
關鍵詞:發動機
陳慶貴,李洪偉,李 明,謝鎮波,謝 靜
(海軍航空大學青島校區, 山東 青島 266041)
航空發動機的渦輪排氣溫度(Exhaust gas temperature,EGT)是航空發動機狀態監控最主要的性能指標。排氣溫度超溫對發動機的危害較大。對于剛裝機的發動機,其EGT值較低。隨著發動機使用時間的增長,發動機的整體性能逐步衰退,其EGT值相應升高[1-3]。因此,通過對積累的EGT歷史數據進行數據挖掘,及時預測EGT值的變化趨勢,便可在一定程度上獲得發動機性能衰退的速度,確定發動機的大致使用壽命。這對于監控航空發動機的性能衰退,節約維修成本,降低飛機的故障率具有重要意義。
1 基于RBF神經網絡的數據挖掘算法
徑向基函數(Radial basis function, RBF)過程神經元的聚合運算既包含了多輸入的空間加權聚合和對時間過程的累積聚合。因此,可以用來處理具有時間累積效應的EGT時間序列[3-4]。
1.1 RBF神經網絡結構

(1)
(2)
同理,隱層第j個過程神經元的核中心函數亦可表示為

j=1,2,…,m
(3)
由基函數的正交性和式(2)~(3),得
(4)
隱層第j個神經元的輸出為
Oj=K(||X(t)-Xj(t)||)=
(5)
1.2 網絡學習
給定K個學習樣本:
2009年1 月-2017年6月我院腸球菌的臨床分布及耐藥性分析 …………………………………………… 鄭巧偉等(10):1356
(x11(t),x12(t),…,x1n(t),d1) 、
(x21(t),x22(t),…,x2n(t),d2) 、…、
(xK1(t),xK2(t),…,xKn(t),dK)
設網絡對于第k個樣本的實際輸出為yk,則網絡誤差函數可定義為
(6)
選取徑向基核函數取為高斯函數,即
(7)
式中,σ表示m個中心函數的平均偏差,可由下式確定:
(8)

(9)
權值學習迭代式為
(10)
式中,s為學習迭代次數;η為網絡學習效率。
1.3 學習算法步驟
1) 給定學習精度ε,累計學習迭代次數s=0,學習最大迭代次數N,選取輸入空間標準正交基函數bl(t),l=1,2,…,L;
2) 按式(2)、式(3)將輸入函數X(t) 和核中心函數Xj(t)(j=1,2,…,m)在bl(t)(l=1,2,…,L)下展開;
3) 按式(8)、式(9)計算σ;
4) 按式(4)計算||X(t)-Xj(t)||,按式(5)計算隱層第j個神經元的輸出Oj;
5) 初始化網絡權值wj(j=1,2,…,m);
6) 由式(6)計算誤差函數E,如果E<ε轉步驟8),如果s>N,轉步驟9);
7) 按式(10)修正權值,s+1→s,轉步驟6);
8) 選取另一學習模式,返回步驟4),直至所有學習模式全部提供給網絡,網絡收斂且輸出誤差E<ε;
9) 輸出學習結果,結束。
2 EGT數據的預測挖掘
2.1 EGT數據預處理
選取某型發動機在一段飛行時間內的EGT數據,然后按照數據挖掘的三個步驟:數據準備、數據挖掘、結果分析與評價進行實施。首先,按照數據準備的要求,對采集的發動機EGT數據中的粗大誤差進行去除,然后采用滑動平均法對數據進行平化處理。分別按照3點滑動平均法、5點滑動平均法和9點滑動平均法對數據進行平滑處理。采集的原始數據,3點滑動平均法、5點滑動平均法和9點滑動平均法平滑獲得的結果如圖2所示。其中,MSE和RMSE的計算結果如表1所示。
從圖2和表1可以看出,n值選擇過大,雖然可以十分有效地去掉時序中的隨機誤差,不過當時序數據發生變化時,處理后的值變化并不大,即這種處理難以反映時序數據中數據的變化,且偏離原始測量數據較大;若n值選擇過小,影響效果恰恰相反,即雖然平滑處理后的值會隨著時序數據的變化而變化,但是序列中的噪聲不能完全消除。綜合考慮數據的采集時間間隔,本文選擇3點滑動平均方法。
2.2 基于RBF神經網絡的EGT預測
利用RBF神經網絡對3點滑動平均獲得的EGT數據進行預測。首先,將獲得的170個數據采用平移窗口的采集形式,取前5個數據作為輸入樣本,取其后的1個值作為輸出樣本,共得到165組輸入輸出樣本,用其中的前160組數據作為訓練數據,后5組數據作為測試數據。其中,擴展速率V_spread=200,獲得的結果如圖3所示。有關RBF神經網絡預測輸出與期望輸出的誤差見表2。
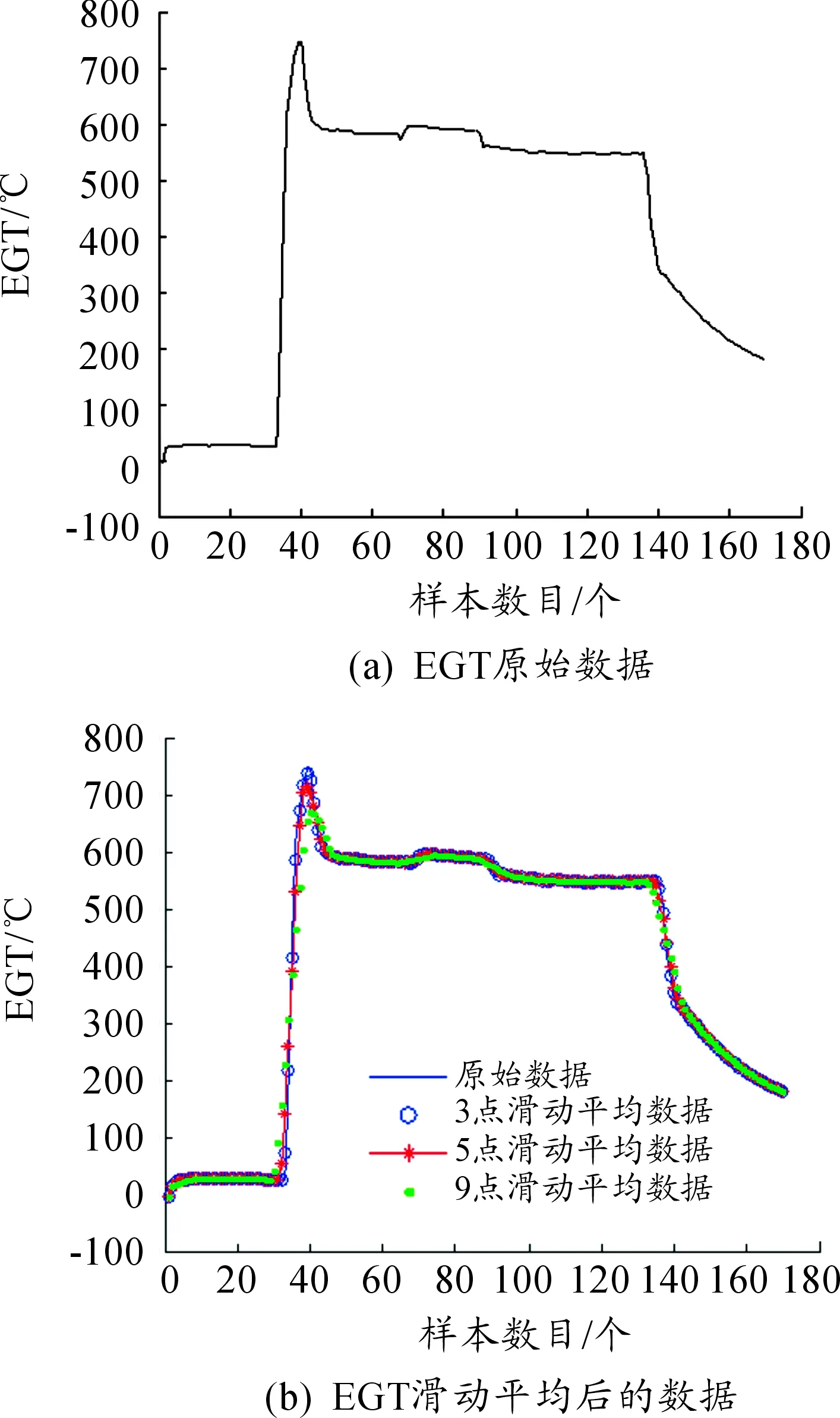
圖2 EGT原始數據和滑動平均后的數據
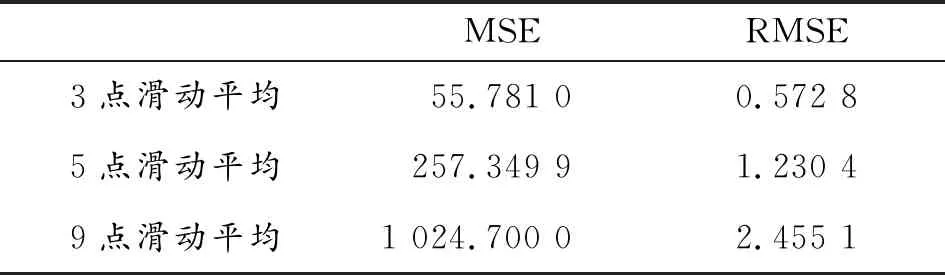
MSERMSE3點滑動平均55.781 00.572 85點滑動平均257.349 91.230 49點滑動平均1 024.700 02.455 1
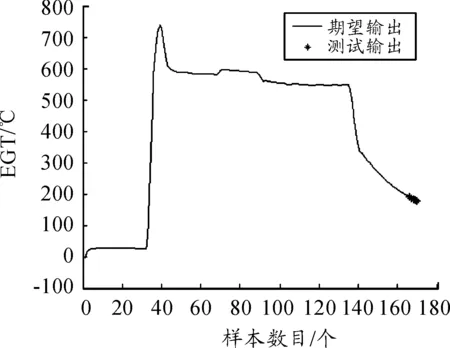
圖3 RBF神經網絡預測結果
對于RBF神經網絡來說,不同的擴展速率對應不同的預測輸出,下面研究不同擴展速率情況下RBF神經網絡的預測結果。數據樣本的劃分方式不變,選取最后一個數據作為測試樣本,擴展速率分別取為V_spread=1,16,25,50,100,200,計算結果如表3所示。

表2 RBF神經網絡預測輸出與期望輸出
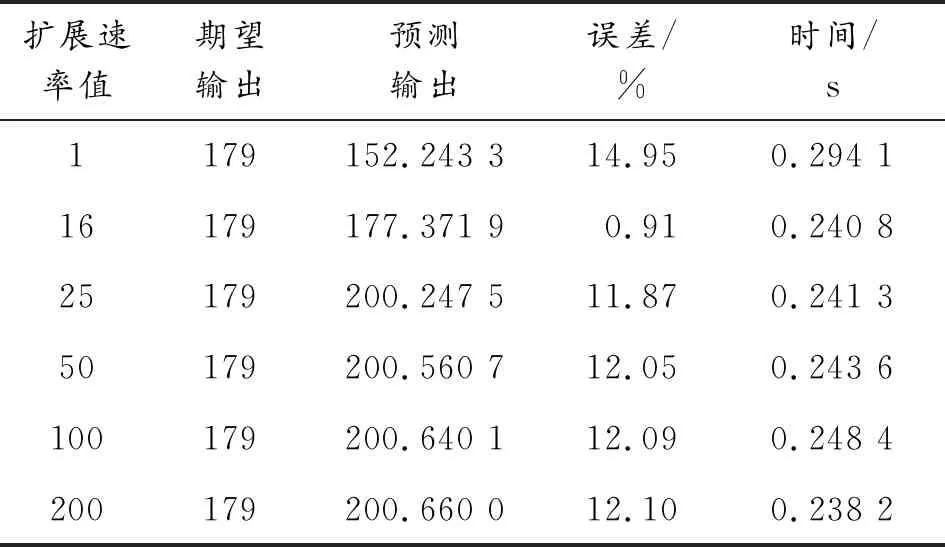
表3 不同擴展速率下RBF神經網絡預測輸出與期望輸出
由表3的數據可以發現,擴展速率不同,RBF神經網絡的預測輸出不同。擴展速率值由1變化到200的過程中,預測輸出值與期望輸出值的差別先減小后增大。因此,在進行預測的過程中,需要選取合適的擴展速率值。
下面研究訓練數據和測試數據數目不同的情況下,RBF神經網絡的預測。這里,選取擴展速率為V_spread=16,預測結果如圖4所示。不同訓練樣本數目下RBF神經網絡預測輸出與期望輸出的誤差見表4。
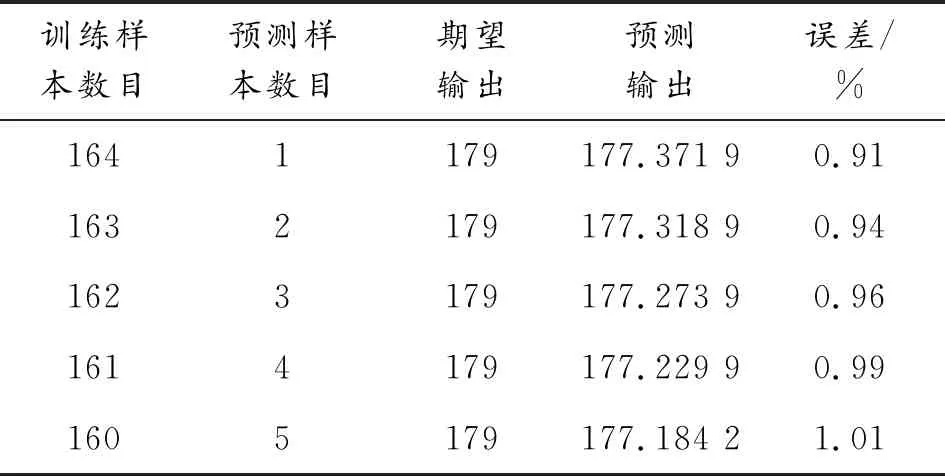
表4 不同訓練樣本數目下RBF神經網絡預測輸出與期望輸出
由預測結果可以發現,訓練樣本數目越多,預測結果越精確。因此,在進行EGT預測時,采集的數據要盡可能多,以便更精確的進行預測。
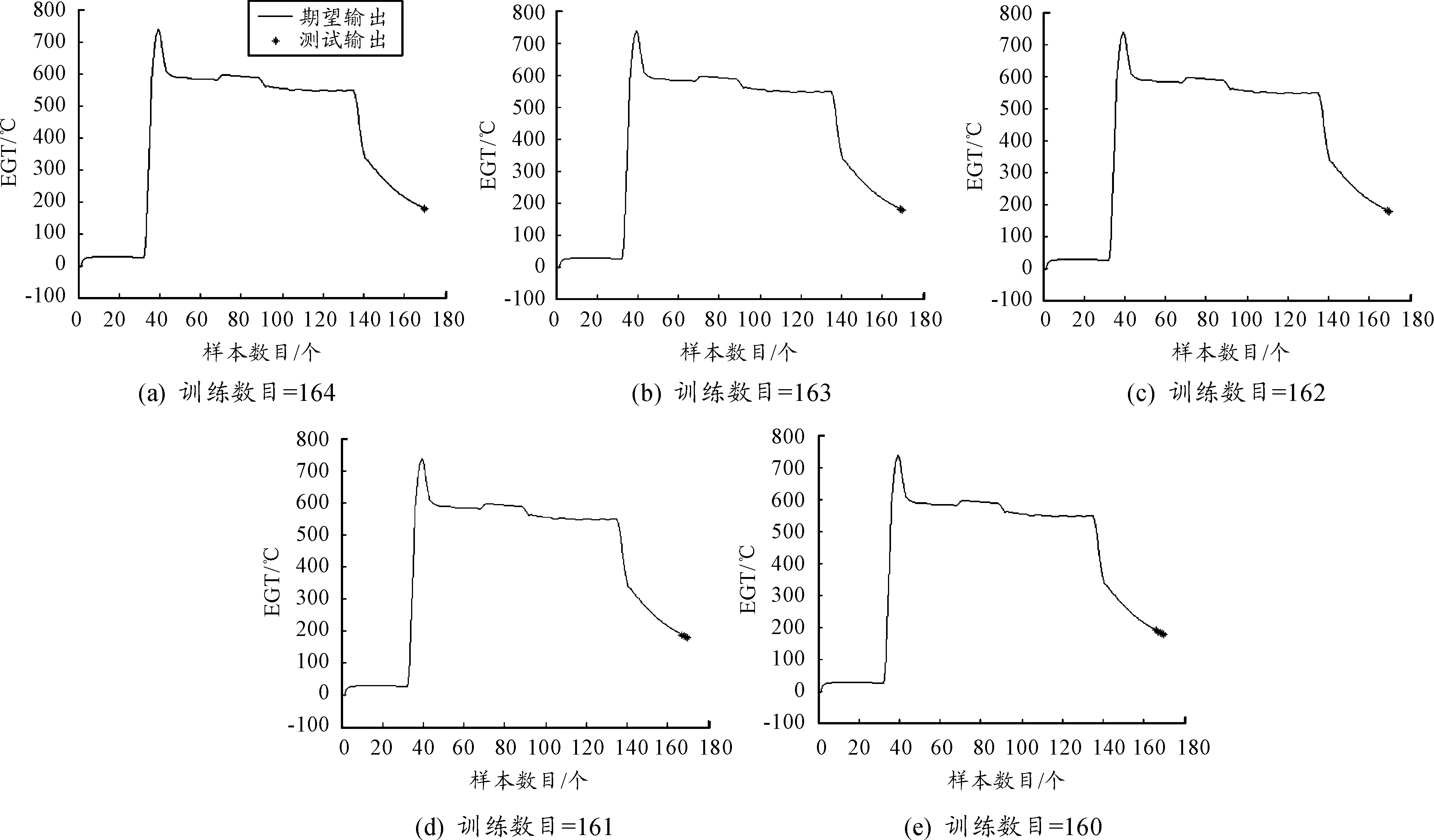
圖4 不同訓練樣本數目下RBF神經網絡的預測結果
3 結論
1) RBF神經網絡在訓練樣本數據較大且參數選擇合適的情況下,能夠滿足EGT數據的預測需求,誤差在2%以內。訓練樣本數據越多,RBF神經網絡的預測精度越高,且RBF神經網絡的預測精度還與擴展速率有關,需要在預測過程中選擇合適的擴展速率值。
2) 由于RBF神經網絡具有較好的穩定性,根據不同的性能參數選取合適的擴展速率值,該算法也可推廣應用到航空發動機在不同工作狀態下其他性能參數如發動機轉速等的預測中。
猜你喜歡
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
汽車維修與保養(2020年11期)2020-06-09 05:42:06
民用飛機設計與研究(2019年2期)2019-08-05 01:33:40
汽車維護與修理(2016年3期)2016-02-28 13:16:54
汽車維修與保養(2015年1期)2015-04-17 03:25:30
汽車與新動力(2015年1期)2015-02-27 12:11:01
汽車與新動力(2014年6期)2014-02-27 12:10:49
汽車與新動力(2014年5期)2014-02-27 12:10:41
汽車與新動力(2014年2期)2014-02-27 12:10:15