基于labview的智能拖地小車系統設計
2019-07-10 04:15:12余先哲韓劍劉賽棟
科技風
2019年9期
余先哲 韓劍 劉賽棟
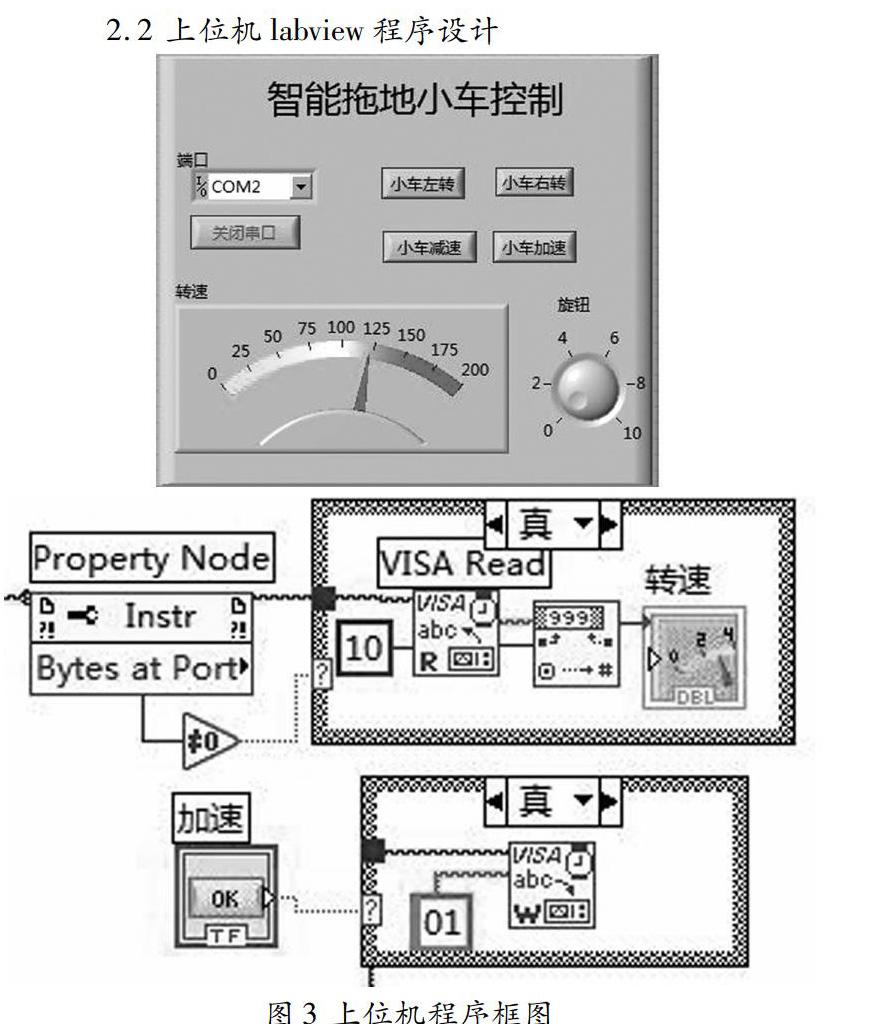
摘 要:本系統設計通過單片機和傳感器對車子進行自動辨別障礙物,從而判斷汽車和障礙物之間的距離,從而來避免發生碰撞。智能自動拖地小車包括避障、人工操控等功能,初步的實現小車的智能化,通過幾個傳感器檢測周圍的環境,來判斷出前方是否有障礙物,再通過單片機來控制小車的運動方向,前進、轉彎來對小車進行避障。在通過時間的設定完成定時拖地工作,整個系統與上位機labview開發的界面進行通信,人機界面良好。
關鍵詞:labview;智能化;避障;檢測
在工業生產和生活工作中,智能拖地小車能夠根據預先設置的環境下自行進行工作、避障,不需要人為控制,就可以自行完成所要的目標。隨著智能化的快速發展,智能拖地小車實現使用傳感器檢測路線和障礙并作出判斷和相應的執行動作,智能拖地小車會讓人們的生活更加多姿多彩,帶來更多的方便和添加生活樂趣。
1 下位機硬件電路設計
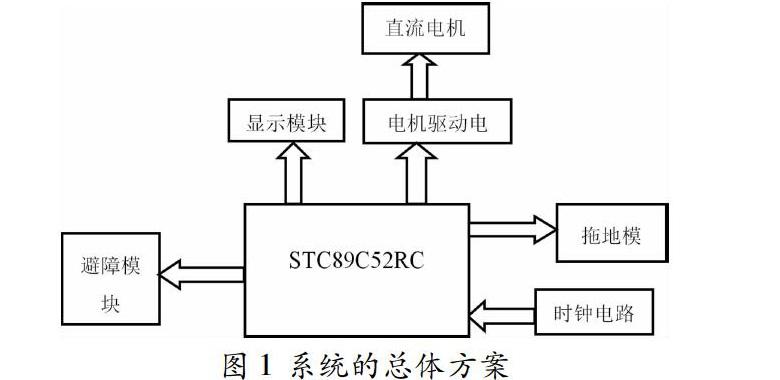
本設計的下位機以STC89C52RC單片機為核心的控制系統,用幾個設計模塊相結合,用單片機主控模塊,利用紅外測距,進行避障功能。通過硬件電路的設計,接著軟件程序的編程來實現自動拖地小車的工作。每個模塊看似獨立工作的,但其中各模塊又能合作工作。系統控制框圖如圖1所示,STC89C52RC單片機是控制顯示模塊、電機驅動模塊、避障模塊、拖地模塊和與上位機labview上位機通信五個大模塊組成的。
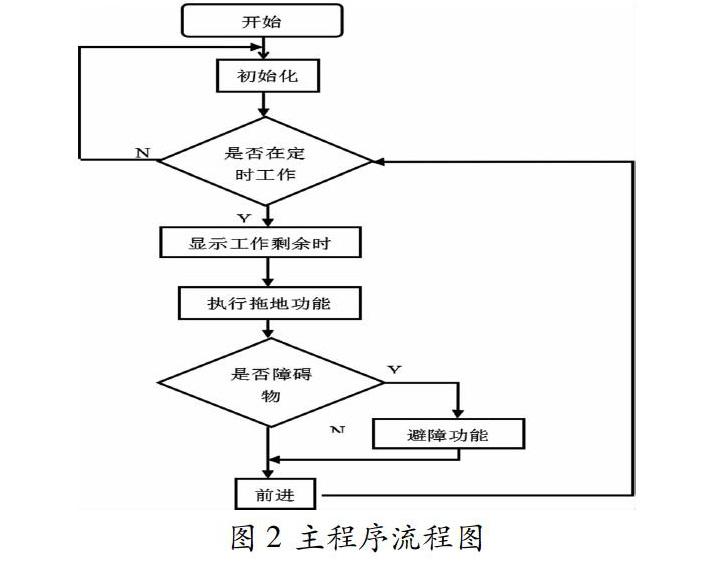
2 系統軟件設計
2.1下位機單片機……
登錄APP查看全文
猜你喜歡
軍事文摘(2022年19期)2022-10-18 02:41:14
建材發展導向(2021年10期)2021-07-16 07:13:24
印刷工業(2020年4期)2020-10-27 02:46:02
印刷工業(2020年4期)2020-10-27 02:45:52
中國交通信息化(2017年4期)2017-06-06 07:21:52
海峽科技與產業(2016年3期)2016-05-17 04:32:12
能源(2015年8期)2015-05-26 09:15:56