MR技術在BIM領域中的適用性研究
2019-07-10 12:16:57周勛甜黃俊惠錢凱
科技風 2019年9期
周勛甜 黃俊惠 錢凱
摘 要:為提高建筑工程部分環節的效率,特探究新興技術MR技術在BIM領域中應用的可行性與適配性,通過Hololens空間映射技術實現空間錨點位置信息確認,應用混合現實工具包技術加速面向Windows混合現實的應用程序的開發,Vuforia擴增實境軟件開發工具包可利用計算機視覺技術實時識別捕捉平面圖像,并通過照相機取景器將虛擬物體展現在鏡頭前實體背景的位置上。使得技術研究在建筑工程中的適用具備一定精準度,錄入信息更有參考價值。
關鍵詞:MR技術;Hololens空間映射;計算機視覺;空間錨點;BIM領域
1 項目概述
目前的建筑信息化模型(BIM)已經有較為完備的體系模型,它可集成整個工程生命周期中不同階段的工程信息資源于一體,以便于被工程的其他參與者調入使用。[1]從BIM的設計過程可以看出,它不僅是數字信息的集成,更是數字信息的應用,設計、建造、管理等方面的數字化方法都有應用。
在虛擬現實的基礎上,混合現實有更為先進之處,因為它結合使用了若干不同類型的技術,以及組合了傳感器的應用,甚至是當前先進的光學和下一代的計算能力。如果這些技術都集合在某一個單一的設備上實現,它將把增強全息數字內容呈現到用戶的實時空間上去,所創造的現實效果匪夷所思。[2]
MR在BIM上的應用不但可以提高建筑工程部分環節的效率,而且將使得技術研究在建筑工程中的適用具備一定精準度,錄入信息更有參考價值。[3]
2 研究路線
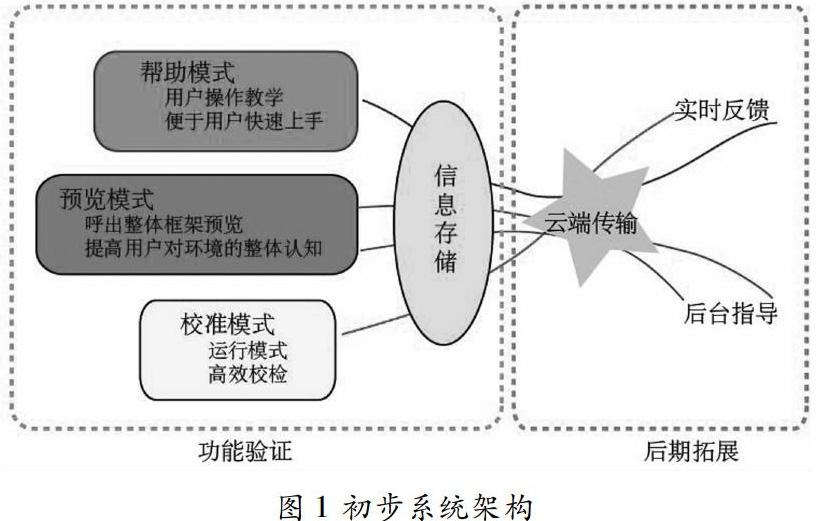
2.1 初步系統構架
初步系統構架如圖1所示,本次研究以功能驗證為主。
系統分三種模式:(1)幫助模式;(2)預覽模式;(3)校準模式。
信息存儲方式以畫面捕捉為主要手段。功能驗證成功后續可以加以網絡拓展。
2.2 技術路線
2.2.1 硬件架構設計原則
以便攜性原則、提高性設計的原則,本研究的MR技術硬件支撐采用當前市面上先進性數一數二的Microsoft Hololens開發者版本。該產品核心功能主要是依托于衍射型平顯、DLP投影芯片、SLAM技術的立體混合成像。讓使用者接收到虛擬場景與現實場景混合疊加的畫面(MR)。
2.2.2 軟件架構設計原則
就設計的精準性原則和設計正確原則,本研究設計的軟件特性:易于操作、更高效、更精準、模板零誤差。對此設計就校準功能之外額外設計了便于使用者認知操作與內容的幫助模式與預覽模式。另外就設計角度,作為參考模板的虛擬場景要嚴格按照建筑施工圖制作,軟件內部邏輯實現也應當嚴格正確,將設計誤差降到最低。
2.3 初步驗證
2.3.1 設計理論基礎
1)通過虛擬錨點與現實標志點的映射,確定空間。該映射允許多重多次自由組合,便于設計與修改。
2)空間錨點的位置信息賦予通過Hololens空間映射技術實現。
2.3.2 模式探究
模式一如下圖2所示:
優點:這種方式對空間確定在錨點信息一一對應的情況下誤差極小,錨點的定位操作也僅限于坐標信息,適用于單次高精度校準的作業。
缺點:每次校準需要操作四個點,繁瑣;四次操作錨點,若使用者操作水平不高就會將誤差指數放大。
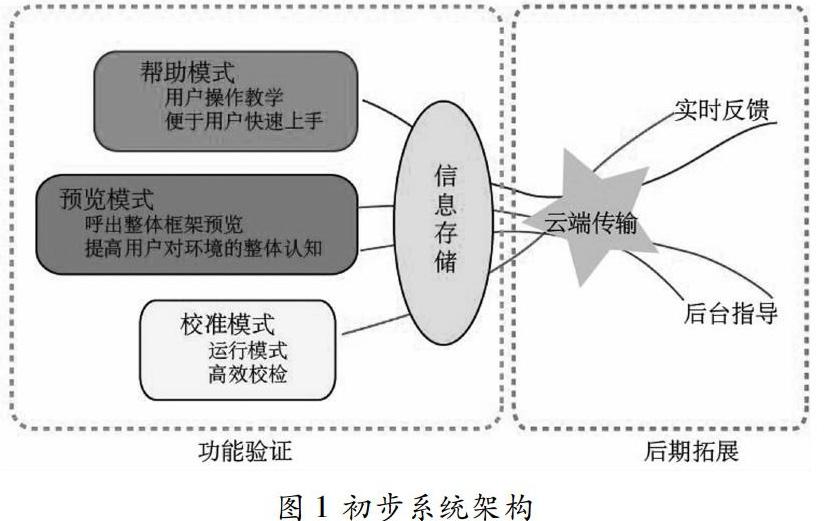
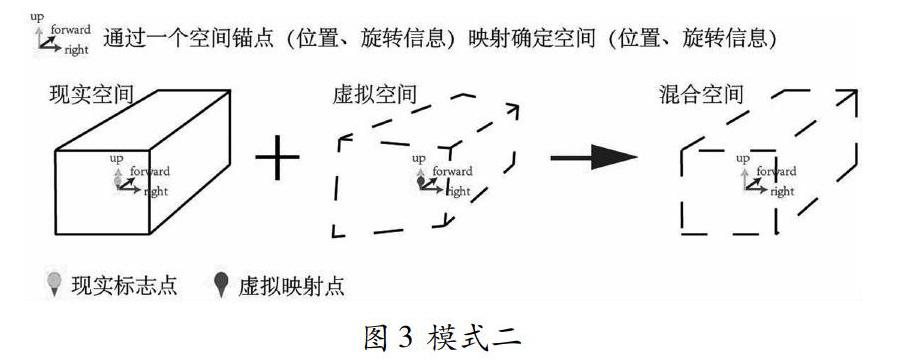
模式二如圖3所示:
優點:這種方式對空間確定在錨點信息一一對應的情況下誤差較小,錨點的操作次數僅為一,適用于需要多次校準的作業。
缺點:空間的確定僅通過一個錨點信息,對使用者的操作水平要求較高,尤其是虛擬映射點的旋轉信息容易產生較大誤差。
旋轉信息賦予操作優化研究:
操作者旋轉方式設計有以下四種:
在空間映射時,令物體始終正朝向與使用者,通過使用者的頭盔朝向來確定旋轉信息。
優點:操作靈活度大。
缺點:精度把控難,對使用者操作要求較高。
在空間映射時,初步只賦予坐標信息,后續通過額外的2個映射點來確定朝向。
優點:理論旋轉信息誤差較小,操作靈活度大。
缺點:操作繁瑣,每次校準需要使用者多次額外操作,數次操作可能會帶來額外誤差。
在空間映射時,使用者只賦予坐標信息,通過AR圖像識別技術事先或者事后獲取精準的旋轉信息。
優點:理論誤差最小,操作便捷。
缺點:在保證靈活度的前提下,原則上,需要構建大量的圖像識別庫,來應對各個物體特異性的旋轉信息。AR識別對紋理特異性較差的三維物體難以識別,為保持識別率需要增設識別標志圖,顯得不怎么智能。
實際應用情況:
設計驗證的領域多為建筑工程施工階段與竣工檢驗階段。
2.4 優化驗證
要求:建筑工程的校檢面積較大,走動頻繁,需要整體的認知把握。
方案:提供預覽模式,便于整體認知。
要求:在誤差降低方向需要通過設計手段來彌補硬件缺陷,同時要保證便攜度,避免操作繁碎。
方案:使用模式探究中旋轉信息賦予操作優化研究的方案3。將HoloLens空間映射技術與Vuforia圖像識別技術結合,簡化操作方式。通過Vuforia圖像識別進行預先的坐標系軸向構建,簡化后續操作,同時單次高精度的高自由度的操作可以將設計降到最低。
3 功能結構
涉及到的模塊絕大多數使用C#語言進行開發,開發工具使用Unity5.6.1以及Visual Studio Community 2015,基礎開發包為MixedRealityToolkit-Unity5.6,開發環境為Windows10。每個模塊實現與業務邏輯都按實際需求考慮以降低誤差為第一要素設計,各模塊協作組合。
4 系統功能
4.1 幫助模式
為用戶提高了必要的提示指導,方便用戶能在短時間快速理解軟件操作與功能。
4.2 預覽模式
通過操作用戶隨時得到可360°無死角預覽的整體框架縮略模型,使用戶可以快速對環境有個整體認知,提高校檢效率。
4.3 校檢模式
運行該模式進行真正的比對校檢,通過簡單的操作將虛擬錨點與現實標志對應結合內部邏輯就能實現虛擬標準模板在現實場景中的疊加,通過比對混合圖像的異同來確定建筑工程的施工是否正確。同時也可以作為施工時的參照。
4.4 場景旋轉信息校準
旋轉標志物作為中間媒介,當旋轉標志物旋轉信息與現實場景一致時,虛擬場景的旋轉信息就和現實場景嚴格一致了。
4.5 信息記錄功能
為便于操作,圖像捕獲是最適合最有必要的信息記錄手段。
4.6 設計尺寸預覽
使用者在使用時可以開啟設計尺寸預覽輔助功能,得到場景下需求的虛擬構件的設計尺寸。
5 應用技術
5.1 Mixed Reality Toolkit
Mixed Reality Toolkit(混合現實工具包)是為了加速面向Windows混合現實的應用程序的開發而開發的腳本和組件的集合。
本項目采用了微軟開源的行為準則。
5.2 Vuforia Augmented Reality SDK
Vuforia Augmented Reality SDK(Vuforia擴增實境軟件開發工具包),它利用計算機視覺技術實時識別和捕捉平面圖像或簡單的三維物體(例如盒子),然后允許開發者通過照相機取景器放置虛擬物體并調整物體在鏡頭前實體背景上的位置。
5.3 多重坐標映射
為多次多重校準設計的空間坐標映射模式,運用圖形學理論,將不同空間坐標系下的位置坐標信息按統一標準操作達到靈活的自定義坐標映射,方便設計與后期修改。
6 總結
初步驗證確實MR技術在建筑工程領域確實有一定的使用價值,能起到較傳統模式所不具備的直觀校檢功能。變相的降低了校檢人員的經驗要求,提高校檢效率與相對精度。總體上講,本次設計研究初步驗證,在HoloLens硬件沒有突破性革新的情況下有一定參考價值,在精度要求很高的建筑施工領域智能化水平還未達到期望值。需要操作人員在偏差值超過閾值之前進行人為手動校準,雖然通過設計手段將單次校準的操作和精度都提高到了設計最優。
參考文獻:
[1]楊威.BIM技術在電力工程中的應用現狀及展望[J].電力與能源,2014,35(04):530-532.
[2]胡驍強.基于BIM和RFID技術的風電建設項目質量管理研究[D].北京:華北電力大學,2017.
[3]初毅,邵兆通,武濤.基于MR+BIM技術的信息化建筑工程應用探討[J].土木建筑工程信息技術,2017,9(05):94-97.
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
中華手工(2017年2期)2017-06-06 23:00:31
Coco薇(2017年5期)2017-06-05 08:53:16
中外會展(2014年4期)2014-11-27 07:46:46
舒適廣告(2008年9期)2008-09-22 10:02:48
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32